机器人如何有效采摘苹果?
摘要:本文利用动捕数据构建拟人运动模型,对比观察两种苹果采摘模式,并对系统性能进行全面评估,为提高机器人采摘效率提供创新方法。
近期,一项关于苹果采摘机器人的有趣研究—— "Design and evaluation of a robotic apple harvester using optimized picking patterns",在农业科学类二区SCI期刊Computers and Electronics in Agriculture上发表。

研究团队利用动作捕捉系统采集的数据构建拟人采摘运动模型,对比观察可应用于苹果采摘机器人的两种运动——优化的“水平拉动弯曲”运动和拟人运动,并使用现场测试对机器人系统的性能进行全面评估。研究为改善苹果采摘机器人的效率和性能提供了创新方法,为未来应用场景的拓展奠定了基础。
研究背景
为降低苹果采摘成本和风险,水果业的机械化势在必行。随着机器视觉技术的发展,苹果收获机器人成为研究热点。苹果收获机器人能够感知环境并自动识别、采摘和放置水果,但目前仍处于实验室和果园试验阶段。收获运动的选择和优化对于苹果采摘机器人的系统性能和效率起着至关重要的作用。
实验过程
机器人硬件中的机械手是完成苹果采摘动作的关键部位。机械手的运动模式设计基于手动拾取动作数据和路径规划。研究团队运用NOKOV度量运动捕捉系统采集采摘者上臂运动的数据,测试区域周围有八个分辨率为2048×1088、3D精度为±0.15mm的数码相机。通过跟踪标记点收集数据,并将其传输到主机进行实时处理,计算空间中移动物体的坐标、速度和加速度(图1)

图1 NOKOV度量动作捕捉系统
1、拟人运动数据采集及路径规划:
实验用带有荧光表面的小球在采摘者的肩部、肘部、手腕和指尖进行标记(图2),由于机械手的结构与人类手臂的结构不同,因此仅使用指尖轨迹数据进行分析。

图2 采摘动作捕捉过程
拾取运动的振幅小且速度快,因此将数据采集频率设置为每秒100帧。同时,为了保持高跟踪精度,系统确保至少有三个摄像头跟踪每个标记点。将运动开始时的指尖标记作为初始位置,每5mm水平位移记录高度变化。数据采集实验共进行了10次。试验完成后对平均值进行多项式拟合,拟合轨迹如图3(a)。
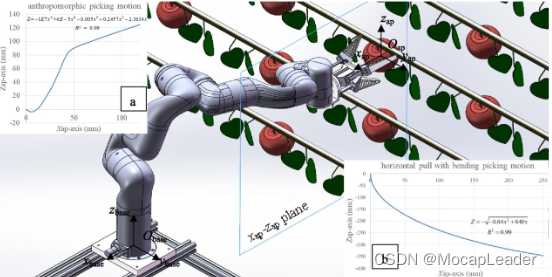
图3. 两种采摘运动的轨迹:(a)拟人采摘运动 和(b)“弯曲水平拉动”采摘运动
2、“弯曲水平拉动”采摘运动路径规划:
使用 MoveIt 进行路径规划。如图3(b)所示。在末端执行器抓住水果后,执行xap-zap平面中从水果位置开始的采摘轨迹。
实验结果
苹果收获现场评估的统计总结如表 1 所示。具体而言,使用拟人动作的苹果采摘成功率为80.17%,比使用“水平拉动并弯曲”动作时(82.93%)低2.76%。另外,在时间方面,使用“水平拉动弯曲”运动的采摘过程的周期时间为12.53±0.53秒,比使用拟人采摘运动的平均时间(17.17±0.36 秒)少4.64 秒;采摘动作本身耗时1.14秒和3.13秒,分别占其总周期时间的9.10%和18.23%。
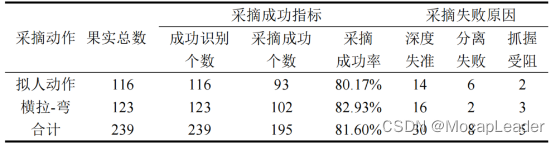
表1 苹果收获试验结果统计表
在采摘过程中,无论使用哪种动作,苹果都没有被拔出或碰伤。基于上述分析,两种采摘运动都显示出在采摘机器人中的应用潜力。与拟人化运动相比,“水平拉动并弯曲”采摘运动具有优越的采摘周期时间和成功率。未来,拟人化运动或将应用于非结构化果园中的采摘机器人。提高采摘机器人感知环境的能力和采摘长摆树枝上生长的苹果的能力是两个潜在的研究方向。
参考文献:
Lingxin Bu, Chengkun Chen, Guangrui Hu, Adilet Sugirbay, Hongxia Sun, Jun Chen,Design and evaluation of a robotic apple harvester using optimized picking patterns,Computers and Electronics in Agriculture, Volume 198,2022, 107092, ISSN 0168-1699
原文链接:https://doi.org/10.1016/j.compag.2022.107092
相关文章:
机器人如何有效采摘苹果?
摘要:本文利用动捕数据构建拟人运动模型,对比观察两种苹果采摘模式,并对系统性能进行全面评估,为提高机器人采摘效率提供创新方法。 近期,一项关于苹果采摘机器人的有趣研究—— "Design and evaluation of a rob…...
C# OpenCvSharp Yolov8 Detect 目标检测
效果 项目 代码 using OpenCvSharp; using OpenCvSharp.Dnn; using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawing; using System.Linq; using System.Text; using System.Windows.Forms;namespace Open…...

rust数组
一、定义数组 (一)一维数组 1.指定所有元素 语法格式 let variable_name: [dataType; size] [value1,value2,value3];例如 let arr: [i32; 4] [10,20,30,40];2.指定初始值和长度 所有元素具有相同的值 语法格式 let variable_name: [dataType; siz…...

ubuntu | 安装NVIDIA套件:驱动、CUDA、cuDNN
CUDA 查看支持最高的cuda版本 nvidia-smiCUDA Version:12.2 区官网下在12.2.x最新的版本即可CUDA Toolkit Archive | NVIDIA Developer 下载安装 wget https://developer.download.nvidia.com/compute/cuda/12.2.2/local_installers/cuda_12.2.2_535.104.05_linux.run sudo…...

JAVA学习笔记
一、学习要点 java的最大优势就是跨平台; java的三个版本,javaSE标准版本,javaEE企业版本,javaME微型版本(用的比较少); JVM(Java Virtual Machine,Java虚拟机); JRE…...

车载软件架构 —— 持续集成持续交付
车载软件架构 —— 持续集成持续交付 我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 对学习而言,学习之后的思考、思考之后的行动、行动之后的改变更重要,如果不盯住内层的改变量,那么在表层投…...

c++ 二元运算符重载, 以加法为例
/* * c 二元运算符重载, 以加法为例 */ #include <stdio.h> class Complex { public: int r0; // real, 实部 int v0; //virtual, 虚部 }; // 重载加法 操作符 // 可见,c2元运算符,取其左侧为第一参数,右侧为第二参数 // 返回值可以付给新的变量 C…...

基于 SpringBoot+Vue的电影影城管理系统,附源码,数据库
文章目录 第一章 简介第二章 技术栈第三章 功能分析第四章 系统设计第5章 系统详细设计六 源码咨询 第一章 简介 本影城管理系统,是基于 Java SpringBoot 开发的。主要包括二大功能模块,即用户功能模块和管理员功能模块。 (1)管…...

Docker实战技巧(二):Kubernetes基础操作实战
Kubernetes定位在Saas层,重点解决了微服务大规模部署时的服务编排问题 1、关闭防火墙并设置开机禁用 systemctl stop firewalld systemctl disable firewalld 2、配置repo cd /etc/yum.repos.d/ 下载Docker repo wget https://mirrors.aliyun.com/docker-…...

计算机视觉与深度学习-循环神经网络与注意力机制-Attention(注意力机制)-【北邮鲁鹏】
目录 引出Attention定义Attention-based model通俗解释应用在图像领域图像字幕生成(image caption generation)视频处理 序列到序列学习:输入和输出都是长度不同的序列 引出Attention 传统的机器翻译是,将“机器学习”四个字都学…...
Centos7安装wps无法打开及字体缺失的问题解决
在centos7上安装了最新的wps2019版本的wps-office-11.1.0.11704-1.x86_64.rpm,生成了桌面图标并信任,可以新建文件,但是软件无法打开。在终端执行如下命令,用命令行启动wps: cd /opt/kingsoft/wps-office/office6/ ./…...
)
华为OD机试真题-会议接待-2023年OD统一考试(B卷)
题目描述: 某组织举行会议,来了多个代表团同时到达,接待处只有一辆汽车,可以同时接待多个代表团,为了提高车辆利用率,请帮接待员计算可以坐满车的接待方案,输出方案数量。 约束: 1、一个团只能上一辆车,并且代表团人数(代表团数量小于30,每个代表团人数小于30)小于…...
mysql explain学习记录
参考了公司内相关博客,实践并记录下,为后面分析并优化索引做准备。 MySQL explain命令是查看MySQL查询优化器如何执行查询的主要方法,可以很好的分析SQL语句的执行情况。 每当遇到执行慢(在业务角度)的SQL,…...

电压放大电路的作用有哪些(电压放大器)
电压放大电路是电子电路中常见且重要的组件,其主要作用是将输入信号的电压放大到所需的输出电压级别,并保持输入信号的形状和准确度。电压放大电路广泛应用于各种电子设备和系统中,具有以下几个重要的作用: 信号放大:电…...

编译opencv-3.4.5 [交叉编译]
在unbuntu20.04环境下编译opencv3.4.5, cmake 版本:3.27.4 gcc 版本:11.4.0 g版本:11.4.0 在此环境下编译opencv4.5.4正常。 1. 编译时遇到的问题 (1) Built target libprotobuf make: *** [Makefile:163…...
Canal 实现MySQL与Elasticsearch7数据同步
1 工作原理 canal 模拟 MySQL slave 的交互协议,伪装自己为 MySQL slave ,向 MySQL master 发送 dump协议 MySQL master 收到 dump 请求,开始推送 binary log 给 slave (即 canal ) canal 解析 binary log 对象(原始为 byte 流) 优点&…...
网络安全攻防对抗之隐藏通信隧道技术整理
完成内网信息收集工作后,渗透测试人员需要判断流量是否出得去、进得来。隐藏通信隧道技术常用于在访问受限的网络环境中追踪数据流向和在非受信任的网络中实现安全的数据传输。 一、隐藏通信隧道基础知识 (一)隐藏通信隧道概述 一般的网络通…...
读书笔记:多Transformer的双向编码器表示法(Bert)-2
多Transformer的双向编码器表示法 Bidirectional Encoder Representations from Transformers,即Bert; 第2章 了解Bert模型(掩码语言模型构建和下句预测) 文本嵌入模型Bert,在许多自然语言处理任务上表现优秀&#…...
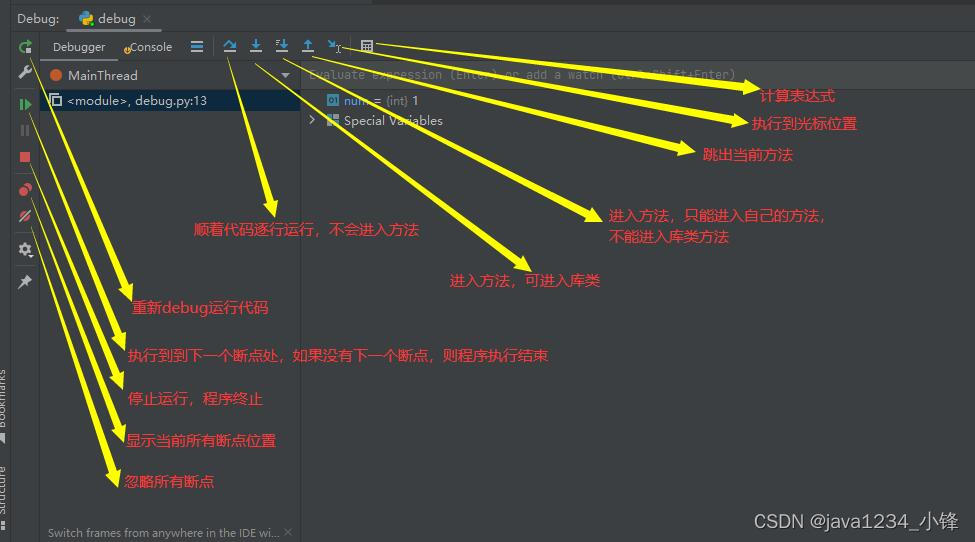
Python 基于PyCharm断点调试
视频版教程 Python3零基础7天入门实战视频教程 PyCharm Debug(断点调试)可以帮助开发者在代码运行时进行实时的调试和错误排查,提高代码开发效率和代码质量。 准备一段代码 def add(num1, num2):return num1 num2if __name__ __main__:f…...

spring security auth2.0实现
OAuth 2.0 的认证/授权流程 jwt只是认证中的一步 4中角色 资源拥有者(resource owner)、客户端(client 第三方)、授权服务器(authorization server)和资源服务器(resource server)。…...
)
浏览器访问 AWS ECS 上部署的 Docker 容器(监听 80 端口)
✅ 一、ECS 服务配置 Dockerfile 确保监听 80 端口 EXPOSE 80 CMD ["nginx", "-g", "daemon off;"]或 EXPOSE 80 CMD ["python3", "-m", "http.server", "80"]任务定义(Task Definition&…...
)
椭圆曲线密码学(ECC)
一、ECC算法概述 椭圆曲线密码学(Elliptic Curve Cryptography)是基于椭圆曲线数学理论的公钥密码系统,由Neal Koblitz和Victor Miller在1985年独立提出。相比RSA,ECC在相同安全强度下密钥更短(256位ECC ≈ 3072位RSA…...
)
React Native 导航系统实战(React Navigation)
导航系统实战(React Navigation) React Navigation 是 React Native 应用中最常用的导航库之一,它提供了多种导航模式,如堆栈导航(Stack Navigator)、标签导航(Tab Navigator)和抽屉…...

蓝牙 BLE 扫描面试题大全(2):进阶面试题与实战演练
前文覆盖了 BLE 扫描的基础概念与经典问题蓝牙 BLE 扫描面试题大全(1):从基础到实战的深度解析-CSDN博客,但实际面试中,企业更关注候选人对复杂场景的应对能力(如多设备并发扫描、低功耗与高发现率的平衡)和前沿技术的…...
React19源码系列之 事件插件系统
事件类别 事件类型 定义 文档 Event Event 接口表示在 EventTarget 上出现的事件。 Event - Web API | MDN UIEvent UIEvent 接口表示简单的用户界面事件。 UIEvent - Web API | MDN KeyboardEvent KeyboardEvent 对象描述了用户与键盘的交互。 KeyboardEvent - Web…...
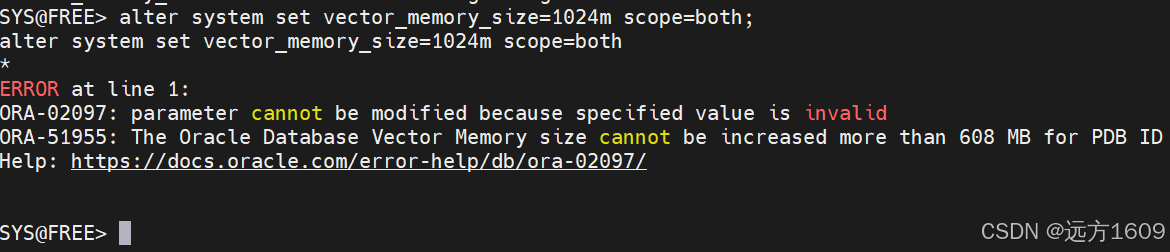
10-Oracle 23 ai Vector Search 概述和参数
一、Oracle AI Vector Search 概述 企业和个人都在尝试各种AI,使用客户端或是内部自己搭建集成大模型的终端,加速与大型语言模型(LLM)的结合,同时使用检索增强生成(Retrieval Augmented Generation &#…...
中医有效性探讨
文章目录 西医是如何发展到以生物化学为药理基础的现代医学?传统医学奠基期(远古 - 17 世纪)近代医学转型期(17 世纪 - 19 世纪末)现代医学成熟期(20世纪至今) 中医的源远流长和一脉相承远古至…...

Spring是如何解决Bean的循环依赖:三级缓存机制
1、什么是 Bean 的循环依赖 在 Spring框架中,Bean 的循环依赖是指多个 Bean 之间互相持有对方引用,形成闭环依赖关系的现象。 多个 Bean 的依赖关系构成环形链路,例如: 双向依赖:Bean A 依赖 Bean B,同时 Bean B 也依赖 Bean A(A↔B)。链条循环: Bean A → Bean…...

动态 Web 开发技术入门篇
一、HTTP 协议核心 1.1 HTTP 基础 协议全称 :HyperText Transfer Protocol(超文本传输协议) 默认端口 :HTTP 使用 80 端口,HTTPS 使用 443 端口。 请求方法 : GET :用于获取资源,…...

【笔记】WSL 中 Rust 安装与测试完整记录
#工作记录 WSL 中 Rust 安装与测试完整记录 1. 运行环境 系统:Ubuntu 24.04 LTS (WSL2)架构:x86_64 (GNU/Linux)Rust 版本:rustc 1.87.0 (2025-05-09)Cargo 版本:cargo 1.87.0 (2025-05-06) 2. 安装 Rust 2.1 使用 Rust 官方安…...