细胞机器人系统中的群体智能
摘要
细胞机器人系统具有“智能”行为能力。本文分析了这种智能的含义。本文根据上述不可思议智能行为的不可预测性来定义机器人智能和机器人系统智能。对不可预测性概念的分析与(1)统计不可预测、(2)不可访问、(3)不可判定性、(4)难处理和(5)不可表示有关。本文认为,后两种类型的不可预测性,当被具有产生秩序能力的系统表现出来时,可以导致一种非平凡的、不同形式的智能行为(群体智能)。与群体智能相关的工程问题与细胞机器人系统有关,细胞机器人系统由自主、非同步、非智能机器人的集合组成,协同完成全局任务。
1. 引言
1.1 CRS的概念
作为通用分布式机器人系统的简化模型,细胞机器人系统(CRS)由大量(有限)机器人组成,并在分布式控制下在有限的n维细胞空间上运行。没有系统范围的集中式机制、同步时钟或共享内存。仅在相邻机器人之间存在有限的通信。一方面,这些机器人必须自主操作;另一方面,他们必须合作完成预定义的全局任务。
细胞机器人系统的优点是:
(1)与为同一任务设计的集中式机器人系统相比,CRS的每个机器人单元的复杂性要低得多。机器人单元可以模块化、大规模生产、可互换和(可能)一次性使用。
(2)由于CRS处于分布式控制之下,并且通常它们是高度冗余的,因此基于CRS的系统是高度可靠的。这些系统可以设计为在各种干扰中生存,并具有动态适应其工作环境的能力。这在需要非常高可靠性的情况下是至关重要的。
(3)由于CRS本质上是一个大规模并行处理系统,其集体计算能力使其能够执行任何单个机器人都不可能完成的机器人任务。
1.2密切相关领域
CRS研究的一个相关领域是细胞自动机理论。细胞模型是冯·诺依曼在机器复制的背景下引入的。从那时起,它被用于模拟各种物理和生物现象,如模式生长、感知和语言识别。硬件实现范围从连接机到可与IBM PC一起使用的MIT CAM板。与基于细胞自动机模型的系统(本质上是同质、静态和同步的)相比,CRS采用了能够处理信息和物质的智能机器(机器人)。在细胞自动机理论中,这两个实体之间没有概念上的区别。物质,如果存在的话,已经嵌入到系统的一组状态中。因此,细胞自动机的一般模型(尽管有能力)并不是捕捉实际机器人系统物理活动特征的最佳模型。考虑到物质处理,CRS模型对细胞自动机进行了限制,以反映细胞元素的物质性质。由于这一本质差异,基于CRS的系统必须是异构的、动态的和异步的。
另一个对CRS研究有重大影响的领域是分布式计算。据观察,存在一组常见的“子”(低级)协议,各种“主”协议在这些协议上运行。此外,这些主要协议通常独立于这些支持协议,或者至少可以与这些支持协议隔离。这些支持协议往往与当前分布式计算的许多研究问题直接相关。一个在没有碰撞的情况下控制机器人协调运动的协议举例说明了这类协议(这个问题将在第4节中讨论)。分布式计算中的许多经典问题,如互斥、领导者发现、一致性和多数投票,都可以在CRS理论中找到它们的“应用”。
1.3论文组织
下一节定义了群体智能。该定义需要讨论“不可预测性”的概念,这是本文的主要贡献。CRS的含义和工程问题在最后两节中提到。这篇论文包括猜想和初步结果,并不是为了在数学上严格证明。
2.群体智能
2.1机器人智能
CRS具有以下意义上的“智能”行为。
首先,我们明确了本文中使用的一些基本术语的含义。“机器”被定义为能够进行机械行为(即传递和/或处理物质/能量)的实体。“自动机”被定义为能够进行信息行为(即传递和/或处理信息)的实体。“机器人”被定义为既能进行机械行为又能进行信息行为的实体(即机器人既是自动机又是机器)。这些定义与常见用法有些不同,但它们有助于避免混淆,因为它们只包含“物质/能量”和“信息”这两个定义明确的概念。对于术语“环境”,还需要附加规范。在接下来的环境中,旨在包括并非系统本身的所有内容。由于信息表示物质的状态,很明显,我们可以拥有“纯”自动机,即只能传递和/或处理信息的实体。另一方面,严格地说,不可能实现“纯”机器,即只传递和/或处理物质的实体,即不传递和//或处理信息,因为机械状态是状态,因此也是信息。然而,在概念上分离这两个函数是很方便的,就像我们在定义中所做的那样。事实上,我们可以假设,例如,与机器产生的机械变化相比,信息变化可以忽略不计。
接下来,我们将“智能机器人”定义为:
定义2.1.1
一种机器人,其行为响应于机器人外部环境的变化,从环境的物理测量来看,既不是随机的,也不是可预测的(在下文指定的意义上)。
为了满足这个定义,我们稍后将看到,智能机器人必须包含一个内部模型或表示,而外部观察者通常无法访问该模型或表示。这个内部模型,加上外部环境,通过内部算法来决定机器人的行为。(模型甚至算法的修改都是机器人内部行为的实例。)
因此,记忆是智能机器人的必要属性。但这还不够——常见的滞后系统可以通过外部测量来预测——因为机器人必须能够通过其内部状态加上外部环境来修改其内部状态,如果它必须根据我们的定义要求从外部环境不可预测。在智能机器人的定义中,“不可预测”一词一直模糊不清。它的含义对定义至关重要,但要具体说明它,我们需要介绍机器人系统,这将在下一节中完成。
2.2机器人系统智能
前面的定义指的是通用实体,而不管其数量,因此它们也适用于系统。然而,系统具有与机器人行为相关的有趣特性。首先,没有一个只包含“自动机”的系统可以是机器人,但一些只包含“机器”的系统可能是机器人。这些结论源于我们对自动机和机器的定义(第2.1节),这些定义基于物质/能量和信息的概念。
事实上,一组“纯”机器可以传输和/或处理信息。每当“机器”将信息编码为自己的模式时,就会发生这种情况。(这基本上是生物(如遗传)信息传递和/或处理的方式。)因此,一组机器可以是一个机器人。
这一事实开启了用更简单的单元制造机器人的可能性,即机器,它们单独不能(或能力有限)处理信息,但可以共同转移和/或处理物质和信息。在这里,我们希望更进一步,重点探讨从非智能机器人中构建智能机器人的意义。
智能机器人在第2.1节中根据行为的不可预测性进行了定义。没有具体说明实际行为和不可预测性。首先,我们根据智能机器人与外部环境中物质(有序)模式(即物质物体的排列,与物质状态模式,即纯信息)的关系来指定行为。在这种模式中,基本上可以有两种类型的智能行为:模式分析(例如识别)和模式合成(例如模式生成)。第一种类型可以通过“纯”自动机系统来实现,而后者只能通过智能机器人来实现。因此,我们将注意力限制在这种类型的智能行为上,即我们将关注以下方面的智能:
非智能机器人系统表现出集体的智能行为,这一行为表现为在外部环境中产生不可预测的特定(非统计意义上)有序物质模式的能力。
我们注意到,由于这种系统合成模式(即产生秩序),它们必须是耗散的。在最简单的情况下,如果系统是能量开放的,则满足该条件,例如,系统的单元(非智能机器人)可以包含能量源。在不失一般性的情况下,我们可以假设情况就是这样。*
2.3不可预测性
在上述定义中,我们使用了术语“特定”(=不是统计意义上的)。如果没有这个限定,该定义似乎也会被协同自组织系统所满足。众所周知,非线性动力学系统可以根据其集体模式的增长率来形成宏观有序状态。在某些情况下,即使没有量子涨落,系统的未来状态空间路径也无法预测。这种不可预测性是由于这样一个事实,即这种系统在进一步发展过程中对初始条件极为敏感,这可能导致有序状态。然而,这些系统的自组织行为本质上是统计的。非平衡非线性统计物理学是研究自组织系统中有序模式统计形成的有力工具。我们在这里感兴趣的不是由许多系统组成的系统,这些系统的性质是统计计算的。例如,在CRS中,我们对一种“没那么多体的问题”感兴趣,大约为100个机器人,我们想对其进行非统计描述。
因此,尽管不可预测性可能在没有内部模型的情况下发生(即,即使系统是完全可访问的),但这种类型的纯随机不可预测不足以产生第2.1节中定义的智能行为。
在上一节中,我们指出,外部环境的不可预测性要求能够通过内部状态(和外部环境)来修改一个实体的内部状态。
这种能力不被大量系统所拥有,否则这些系统似乎满足定义。例如,植物等生物细胞系统似乎符合定义。然而,对于这些系统来说,“不可预测性”仅仅是由于内部模型(遗传密码)的物理不可访问性。这种类型的不可预测性并不是固有的,因为我们可能会设想通过物理测量来确定遗传结构的方法。显然,这些测量将非常复杂,可能需要很长时间,但由于遗传密码无法自我改变(我们排除突变,因为它们通常发生在很长的时间范围内),因此最终可以访问它,使系统实际上是可预测的。类似的考虑适用于任何系统,其不可预测性仅仅是由于其内部模型的物理不可访问性。
更有趣的是系统的内部状态在物理上是可访问的,但它仍然是不可预测的。这样的系统确实存在;事实上,如果我们转向由纯自动机单元组成的系统,我们可以立即形成这种类型的不可预测性。事实上,众所周知,通用自动机的信息时间行为是不可预测的。因此,例如,“机械”通用自动机可以被视为由非智能机器人单元组成的不可预测系统。由于它能够产生有序的模式,所以它满足定义。尽管机械通用自动机(例如,机械“生命游戏”元胞自动机)似乎为满足定义的系统提供了一种“存在证明”,但在以下意义上,通用自动机的不可预测性类型是非常有限的。
首先,通用自动机的不可预测性到底是什么意思?自变量如下[16]所示。预测任何系统行为的唯一方法是在通用自动机上进行计算。如果要预测其行为的系统本身能够进行通用计算,那么这种计算通常会简化为直接模拟。但在这种情况下,这种模拟的速度与模拟系统本身的发展速度只有大约一个常数。因此,能够进行普遍计算的系统的无限时间行为在任何有限时间内通常是不可知的,因此该问题在形式上是不可判定的。
因此,上述问题中的不可预测性本质上是不可判定的。但是,那些行为不仅在“无穷大”而且在“每一步”都是不可预测的系统呢?这就是任何计算机都无法在任何步骤(即创建新模式所需的时间)预测的系统?
显然,这些逐步不可预测的系统是智能行为感兴趣的系统,因为我们感兴趣的是一段时间内的智能行为,而不仅仅是无穷大的智能行为。
系统的阶跃不可预测性当然可以存在,只要(某些)组件本身是阶跃不可预测的。这是一个微不足道的案件。根据定义,我们对其组件是可预测的,但在全局范围内它们是不可预测的系统感兴趣。
这可以通过两种方式实现。首先,严格来说,全局系统是可预测的,但不是实时的。(这里的“实时”是指“在系统产生新模式所需的时间内”。)换句话说,预测问题是“棘手的”。
在第二种情况下,全局系统是不可预测的(无论计算速度如何),因为它本质上是不可外部表示的。这两个案例都具有概念和实际意义。这两种类型的不可预测性都包含在下面对群体智能的定义中(定义2.2.1)。第二种情况将在其他地方详细讨论。在这里,我们就“棘手案例”发表一些看法。
传统“智能”机器人的操作包括:
(1) 感测环境,
(2) 计算,
(3) 行动。
这三个操作是按顺序执行的。假设这样的机器人A在步骤(3)中产生模式。这些模式以及环境由第二个机器人B观察,其步骤(2)由知道A的计算机的初始状态的通用计算机执行。那么A可以由B实时预测:在A产生新的模式之前,B已经计算好了。
相反,考虑合成自身模式的非智能机器人集合C的操作(例如,移动机器人以CRS中的模式排列自身)。对于机器人系统C,步骤(2)和(3)并行发生。如果观察机器人B知道C的初始状态,它能实时预测C产生的模式吗?这取决于C中每个机器人单元的速度,因为B必须模拟C的动力学。假设对于 C,步骤 (3) 比 (2) 慢得多,这是合理的,并让 Tc 成为任何机器人单元的步骤 (3) 的上限。(由于它们异步运行,没有共享时钟,因此它们的运行时间会有所不同,但可以假设上限)。因此,Tc是C创建新模式的“实时”。 通用计算机B必须在Tb:Tb<Tc的时间内,从C的初始状态和外部环境预测这种模式。
首先假设B的计算机具有Von Neumann体系结构。由于Tc不取决于C中机器人单元的数量N,因此不取决于C的状态Nc的数量,而Tb取决于Nc,因此如果N足够大,我们总是可以获得Tc<Tb。因此,C是不可预测的。现在假设B的计算机具有任何体系结构,例如元胞自动机体系结构,并且它被设置为模拟C从其初始状态的进化。但由于C的进化包括其动力学(除其他外,这取决于C中机器人的内部时钟,这些时钟可能以不可预测的速度运行),因此无法完全模拟。对时钟动力学的任何近似都将导致Nc阶的复杂性计算。因此,如果Nc足够大,这些计算的时间Tb’也将是Tb’>Tc。
在任何情况下,在实际应用中,对于相对较小的N,不可预测性会很快达到。例如,如果Tc=1msec,N=100,Nc~2100,这是一个超出当前超级计算机计算能力的问题。
因此,一类机器人系统,无论是概念上的还是实践上的,都可以巧妙地表现出一种有趣的智能行为:
定义 2.2.1 群体智能
非智能机器人系统表现出集体的智能行为,这一行为表现为在外部环境中不可预测地产生特定(=非统计意义上)有序物质模式的能力。其中,不可预测是指全局“棘手”或“外部不可表示”。
3.比较
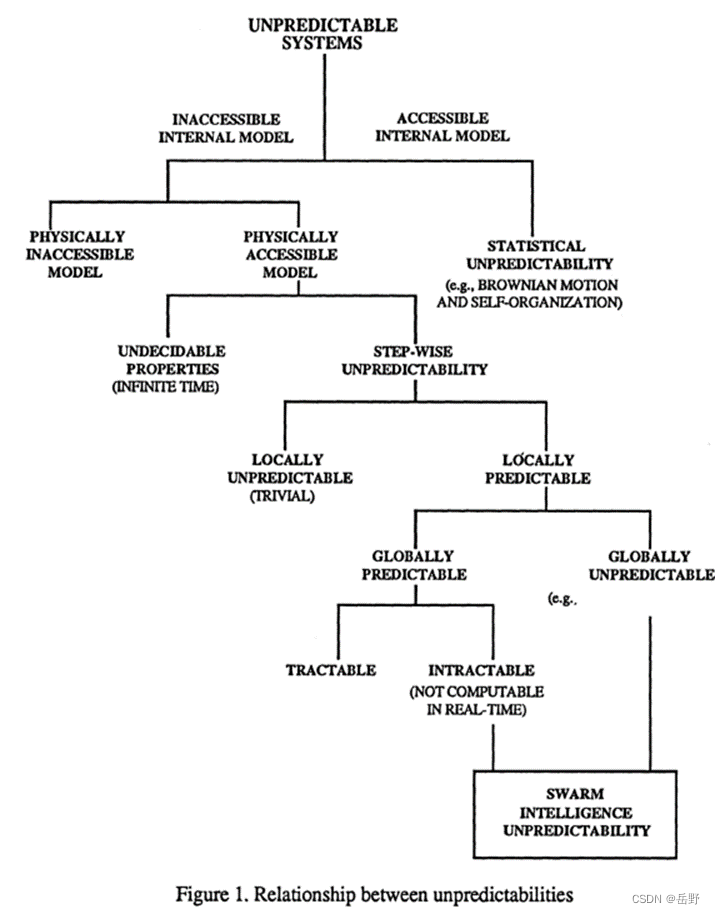
由于“不可预测性”是定义2.2.1中的关键概念,因此比较迄今为止提到的不同类型的不可预测系统是有用的。图1示意性地显示了不可预测系统之间的关系。纯粹的统计不可预测性(例如随机系统)可以(在非平衡条件下)产生有序模式,但只能在统计上产生。其他形式的不可预测性在某种程度上取决于内部状态的不可接近性。内在(如物理)不可接近性(如生物系统的遗传密码)的兴趣有限。由于缺乏计算能力而导致的不可访问性导致我们区分不可确定性和逐步不可预测性。在分布式动力系统中,后者可能导致棘手或外部不可表示性——这些情况构成了“群体智能”的不可预测性。
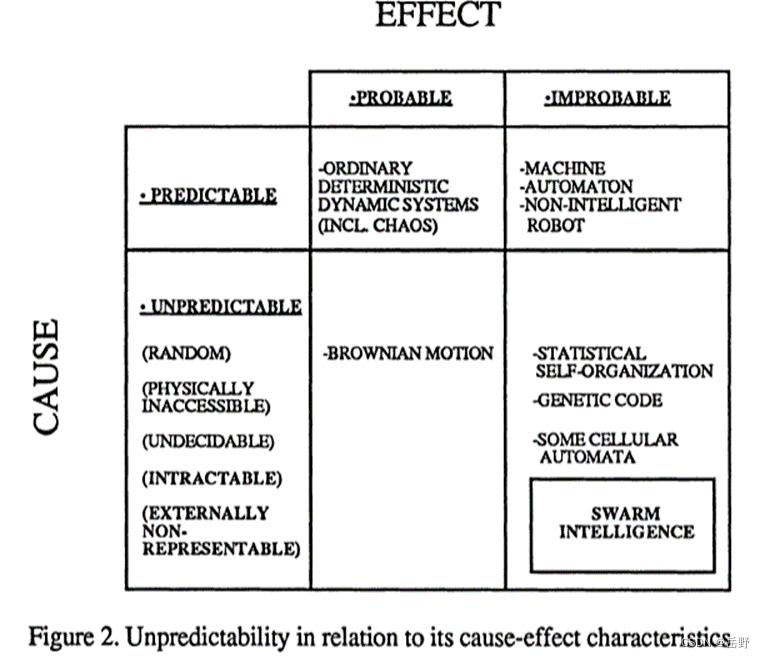
我们还可以将群体智能与其因果特征联系起来。在图2中,我们将群体智能定位为其他四组系统,其特征是具有可预测或不可预测的方式,分别产生“可能”或“不可能”的效果,例如随机或有序模式。(1)可预测地产生“可能”结果的系统的例子是普通动态系统,也有确定地产生混沌行为的非线性系统。可预测地产生“不可能”结果的系统是机器、确定性自动机和非智能机器人。(2)可预测地产生“不可能”结果的系统是机器、确定性自动机和非智能机器人。(3)“不可预测”产生“可能”的典型系统是产生随机输出的随机系统,例如布朗运动。最后(4)根据不可预测性的类型,不可预测地产生“不可能”的系统范围从统计自组织系统到细胞自动机,再到群体智能系统,如第2.3节所述。在图2的上下文中,群体智能可以被简明地定义为“不可能的难以处理或不可表示的创造”。
4.结论
群体智能表现为计算和动力学的相互作用。从理论上讲,这两个领域直到最近几年才开始融合,尤其是在S.Wolfram发起的研究领域。到目前为止,大部分的重点都放在了元胞自动机上。关于它们的不可判定性以及与模式形成的关系的研究很多。
然而,机器人系统还没有得到扩展(其他异步系统也被普遍被忽视)。根据定义,机器人是计算和动力学相结合的系统,我们预计机器人科学的理论基础最终将围绕动力学/计算系统理论出现。同时,展示群体智能的系统(如CRS)的工程问题可能有助于揭示一些基本问题。CRS中此类问题的示例有:
(1)将分布式控制协议扩展到“结”和“边界”问题;
(2)子协议;
(3)主动和被动“群”架构[19];
(4)具体问题,如自组装[20]和制造[19];
(5)通过环境传感进行控制和修复;
2.2.1中定义的群体智能可能会在大量动物社会中表现出来,例如蚁群。因此,我们可以预期,目前出现的群体智能工程,仅处于初级阶段,将来很可能会从“仿生”的角度受益。
相关文章:
细胞机器人系统中的群体智能
摘要 细胞机器人系统具有“智能”行为能力。本文分析了这种智能的含义。本文根据上述不可思议智能行为的不可预测性来定义机器人智能和机器人系统智能。对不可预测性概念的分析与(1)统计不可预测、(2)不可访问、(3&am…...
【办公自动化】用Python将PDF文件转存为图片(文末送书)
🤵♂️ 个人主页:艾派森的个人主页 ✍🏻作者简介:Python学习者 🐋 希望大家多多支持,我们一起进步!😄 如果文章对你有帮助的话, 欢迎评论 💬点赞Ǵ…...
不容易解的题9.26
想编写这一版,是因为之前复习字符串或者双指针等其他栏目时候没有写文章,但是现在回过头来刷,所以想着写一篇,我在leetcode的收藏夹里收藏了一些我自认为需要多加练习的题目,它们并非是很难的,极不易理解的…...

易点易动固定资产管理系统:精准管理与科学采购,降本增效的利器
在现代企业管理中,固定资产的精准管理和科学采购已成为提升企业效率和降低成本的重要环节。为了满足企业管理的需求,我们自豪地介绍易点易动固定资产管理系统,这是一款功能强大的软件解决方案,旨在帮助企业实现固定资产的精准管理…...
)
人大金仓分析型数据库外部表(二)
外部表错误数据 默认情况下,如果外部表数据中包含有一个错误,命令就会失败并且不会有数据被载入到目标数据库表中。gpfdist 文件服务器使用 HTTP 协议。使用 LIMIT的外部表查询会在检索到所需的 行后结束连接,导致一个HTTP 套接字错误。 如…...
rtp流广播吸顶喇叭网络有源吸顶喇叭
SIP-7043 rtp流广播吸顶喇叭网络有源吸顶喇叭 一、描述 SIP-7043是我司的一款SIP网络有源吸顶喇叭,具有10/100M以太网接口,内置有一个高品质扬声器,将网络音源通过自带的功放和喇叭输出播放,可达到功率20W。SIP-7043作为SIP系统的…...
Spring学习笔记12 面向切面编程AOP
Spring学习笔记11 GoF代理模式_biubiubiu0706的博客-CSDN博客 AOP(Aspect Oriented Programming):面向切面编程,面向方面编程. AOP是对OOP的补充延申.底层使用动态代理实现. Spring的AOP使用的动态代理是:JDK动态代理_CGLIB动态代理技术.Spring在这两种动态代理中灵活切换.如…...
定义)
【0225】源码分析postgres磁盘块(disk block)定义
相关阅读: 【0040】 PostgreSQL数据库表文件底层结构布局分析 1. postgres磁盘块定义 在学习本文之前,需要对关系表的结构原理有一定的理解。如果不清楚PG磁盘数据表文件的布局,可阅读:...
第九章 动态规划 part11 123. 买卖股票的最佳时机III 188. 买卖股票的最佳时机IV
第五十天| 第九章 动态规划 part11 123. 买卖股票的最佳时机III 188. 买卖股票的最佳时机IV 一、123. 买卖股票的最佳时机III(难难难难难) 题目链接:https://leetcode.cn/problems/best-time-to-buy-and-sell-stock-iii/ 题目介绍ÿ…...
阿里云服务器共享型和企业级独享有什么区别?
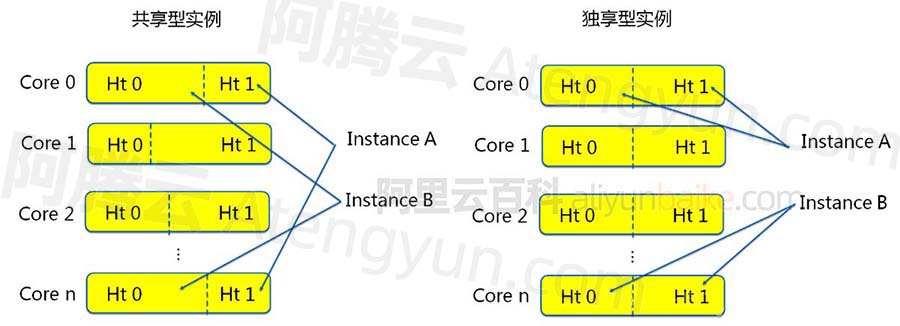
阿里云ECS云服务器共享型和企业级有什么区别?企业级就是独享型,共享型和企业级云的主要区别CPU调度模式,共享型是非绑定CPU调度模式,企业级是固定CPU调度模式,共享型云服务器在高负载时计算性能可能出现波动不稳定&…...

Vue.js基本语法上
🎬 艳艳耶✌️:个人主页 🔥 个人专栏 :《Spring与Mybatis集成整合》《springMvc使用》 ⛺️ 生活的理想,为了不断更新自己 ! 目录 1.插值 1.1 文本 1.2 v-v-html 1.3 数据双向绑定数据(v-model) 1.4 属性ÿ…...

【1333. 餐厅过滤器】
来源:力扣(LeetCode) 描述: 给你一个餐馆信息数组 restaurants,其中 restaurants[i] [idi, ratingi, veganFriendlyi, pricei, distancei]。你必须使用以下三个过滤器来过滤这些餐馆信息。 其中素食者友好过滤器 v…...

wifi7有关的210个提案
[1] TGbe, “Compendium of motions related to the contents of the TGbe specification framework document,” 19/1755r8, September 2020. [2] Bin Tian (Qualcomm), “Discussion on 11be PHY capabilities,” 20/0975r0, July 2020. [3] TGbe, “Compendiu…...
200行C++代码写一个Qt俄罗斯方块小游戏
小小演示一下: 大体思路: 其实很早就想写一个俄罗斯方块了,但是一想到那么多方块还要变形,还要判断落地什么的就脑壳疼。直到现在才写出来。 俄罗斯方块这个小游戏的小难点其实就一个,就是方块的变形,看似…...
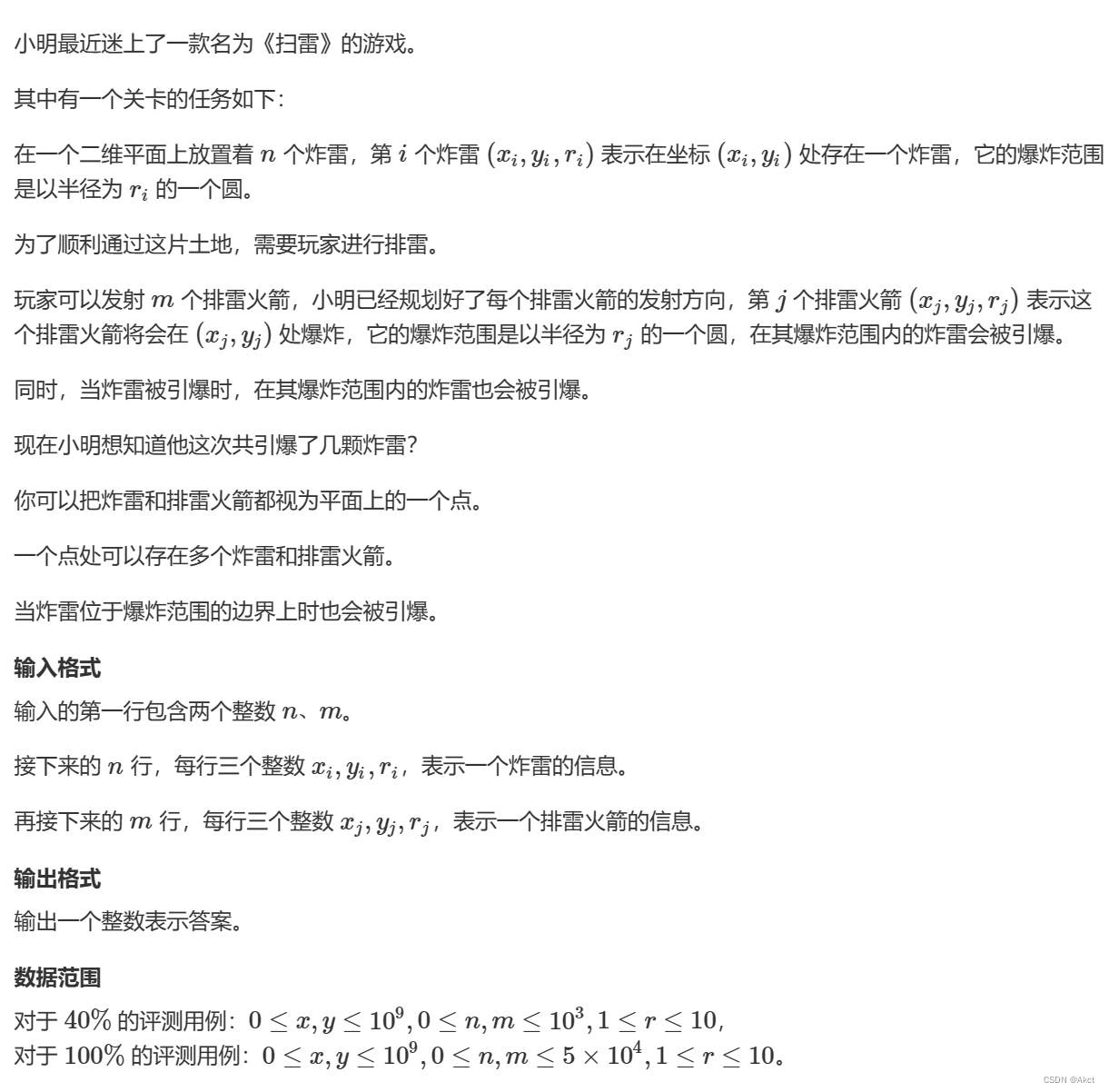
蓝桥杯每日一题20223.9.26
4407. 扫雷 - AcWing题库 题目描述 分析 此题目使用map等都会超时,所以我们可以巧妙的使用哈希模拟散列表,哈希表初始化为-1首先将地雷读入哈希表,找到地雷的坐标在哈希表中对应的下标,如果没有则此地雷的位置第一次出现&#…...
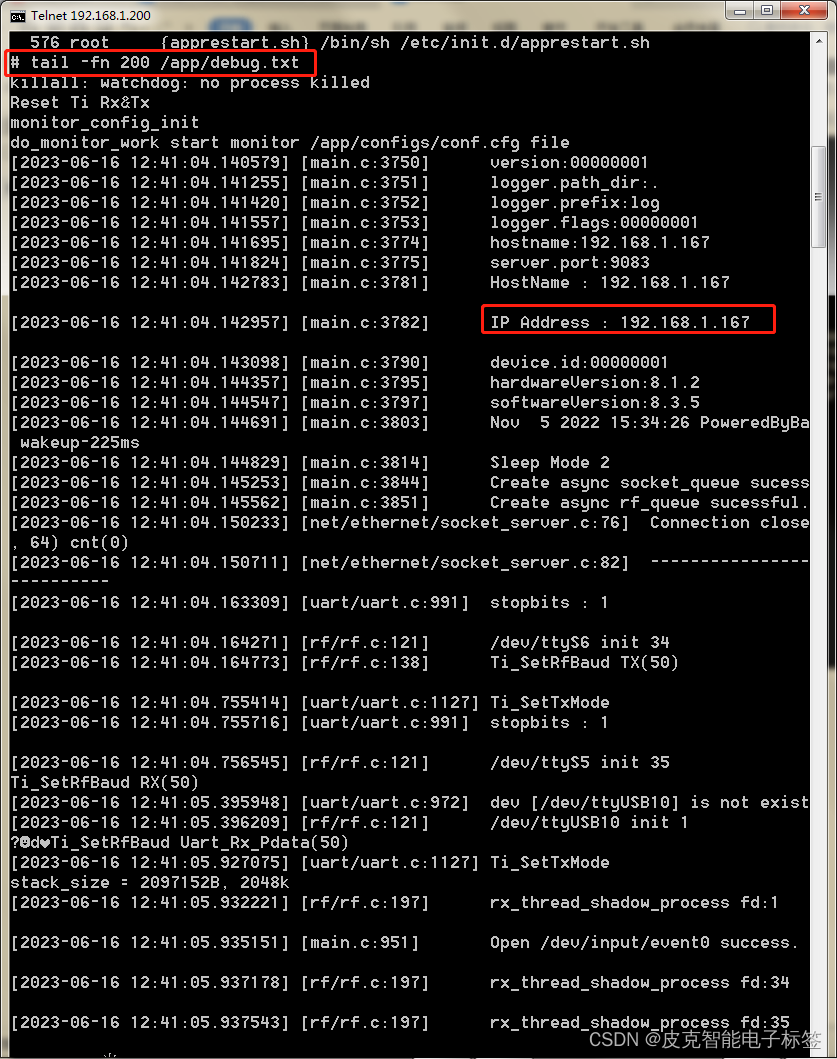
查看基站后台信息
查看基站后台信息 电脑配置固定ip: 192.168.1.99: 打开“网络和共享中心”,选择更改适配器设置: 右键“本地连接”,选择属性 基站网线直连电脑网口 Telnet 登录基站 打开dos窗口 windows键R”,输入cmd,点确定&…...

关于坐标的旋转变换和坐标系的旋转变换
不管是坐标的旋转变换还是坐标系下的旋转变换,只和旋转的顺时针和逆时针有关。然坐标系间的顺时针和逆时针是根据当前坐标系在目标坐标系下的相对位置确定。 一。逆时针旋转belta角度的公式 二。顺时针旋转belta角度的公式 三。坐标的旋转变换 1.坐标的旋转变换相…...
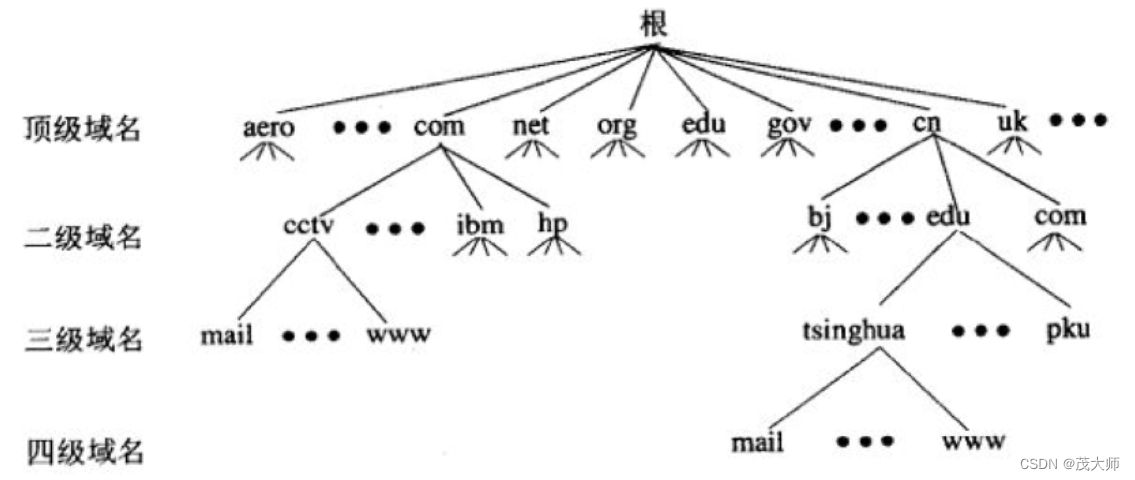
2023.9.19 关于 数据链路层 和 DNS 协议 基本知识
目录 数据链路层 MTU DNS 协议 补充 DHCP协议 数据链路层 基本概念: 考虑相邻两个节点之间的传输(通过 网线 / 光纤 / 无线 直接相连的两个设备)以太网协议 规定了 数据链路层 和 物理层 的内容 IP地址 与 mac地址 的相互配合 IP地址 描…...

如何保证接口幂等性
简介 接口幂等性就是说用户使用相同的参数请求同一个接口无论是一次还是多次都应该是一样的。不会因为多次的点击产生不同效果。 举个栗子:一个用户在手机APP上提200块钱,然后一不小心点击了两次,那么就应该只提取出200块钱,不应…...
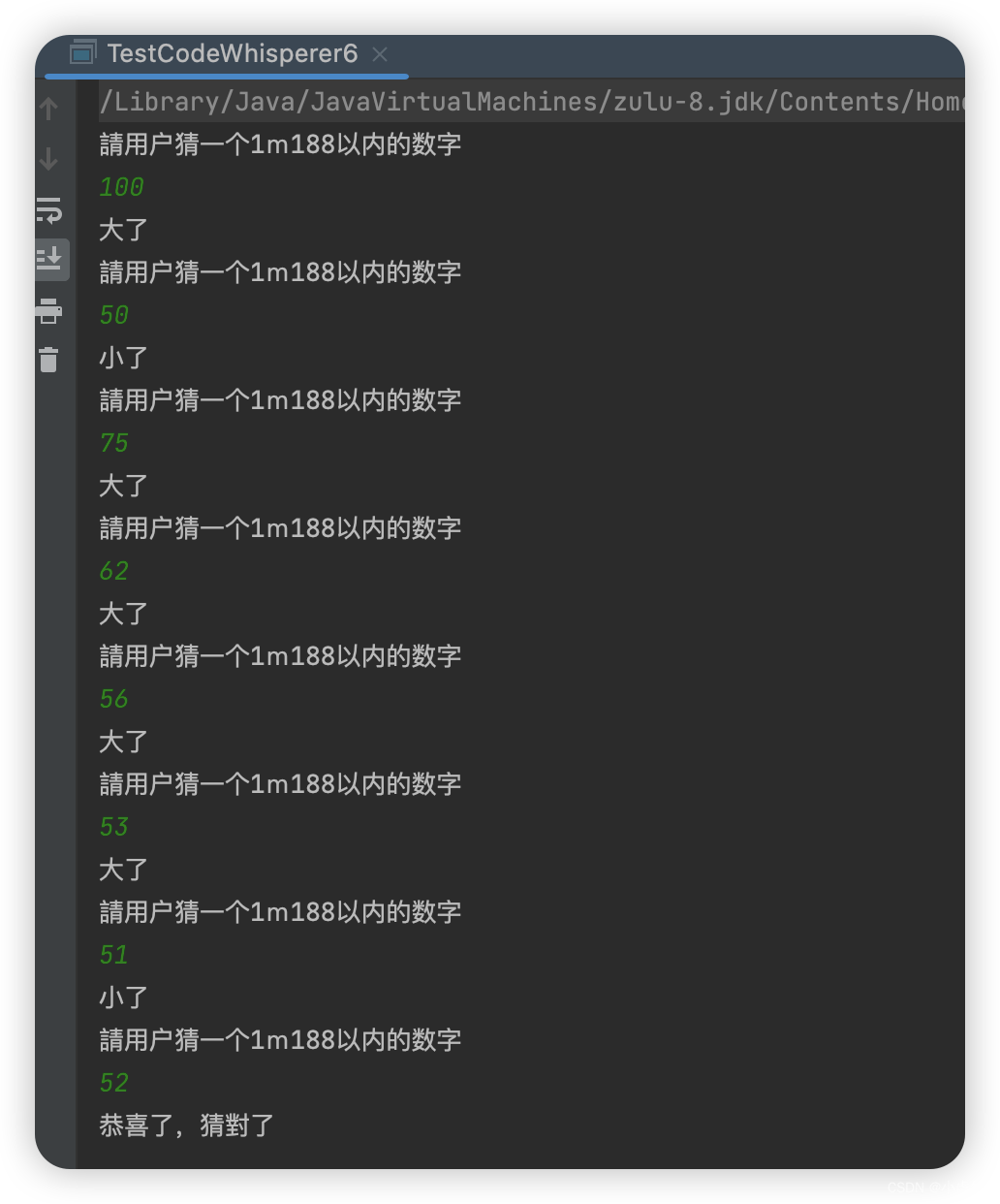
搭建智能桥梁,Amazon CodeWhisperer助您轻松编程
零:前言 随着时间的推移,人工智能技术以惊人的速度向前发展,正掀起着全新的编程范式革命。不仅仅局限于代码生成,智能编程助手等创新应用也进一步提升了开发效率和代码质量,极大地推动着软件开发领域的快速繁荣。 当前…...
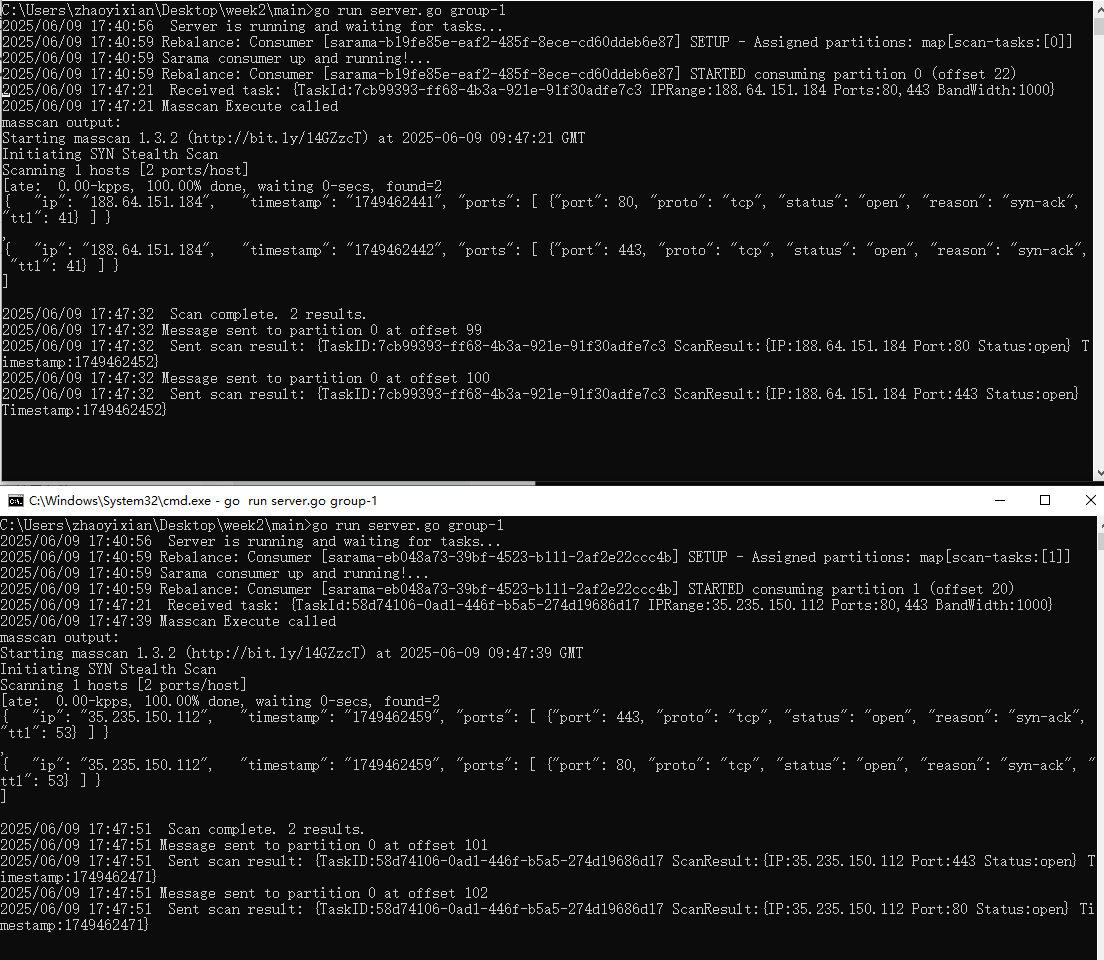
【kafka】Golang实现分布式Masscan任务调度系统
要求: 输出两个程序,一个命令行程序(命令行参数用flag)和一个服务端程序。 命令行程序支持通过命令行参数配置下发IP或IP段、端口、扫描带宽,然后将消息推送到kafka里面。 服务端程序: 从kafka消费者接收…...

React hook之useRef
React useRef 详解 useRef 是 React 提供的一个 Hook,用于在函数组件中创建可变的引用对象。它在 React 开发中有多种重要用途,下面我将全面详细地介绍它的特性和用法。 基本概念 1. 创建 ref const refContainer useRef(initialValue);initialValu…...

FastAPI 教程:从入门到实践
FastAPI 是一个现代、快速(高性能)的 Web 框架,用于构建 API,支持 Python 3.6。它基于标准 Python 类型提示,易于学习且功能强大。以下是一个完整的 FastAPI 入门教程,涵盖从环境搭建到创建并运行一个简单的…...

质量体系的重要
质量体系是为确保产品、服务或过程质量满足规定要求,由相互关联的要素构成的有机整体。其核心内容可归纳为以下五个方面: 🏛️ 一、组织架构与职责 质量体系明确组织内各部门、岗位的职责与权限,形成层级清晰的管理网络…...

【Go】3、Go语言进阶与依赖管理
前言 本系列文章参考自稀土掘金上的 【字节内部课】公开课,做自我学习总结整理。 Go语言并发编程 Go语言原生支持并发编程,它的核心机制是 Goroutine 协程、Channel 通道,并基于CSP(Communicating Sequential Processes࿰…...

unix/linux,sudo,其发展历程详细时间线、由来、历史背景
sudo 的诞生和演化,本身就是一部 Unix/Linux 系统管理哲学变迁的微缩史。来,让我们拨开时间的迷雾,一同探寻 sudo 那波澜壮阔(也颇为实用主义)的发展历程。 历史背景:su的时代与困境 ( 20 世纪 70 年代 - 80 年代初) 在 sudo 出现之前,Unix 系统管理员和需要特权操作的…...
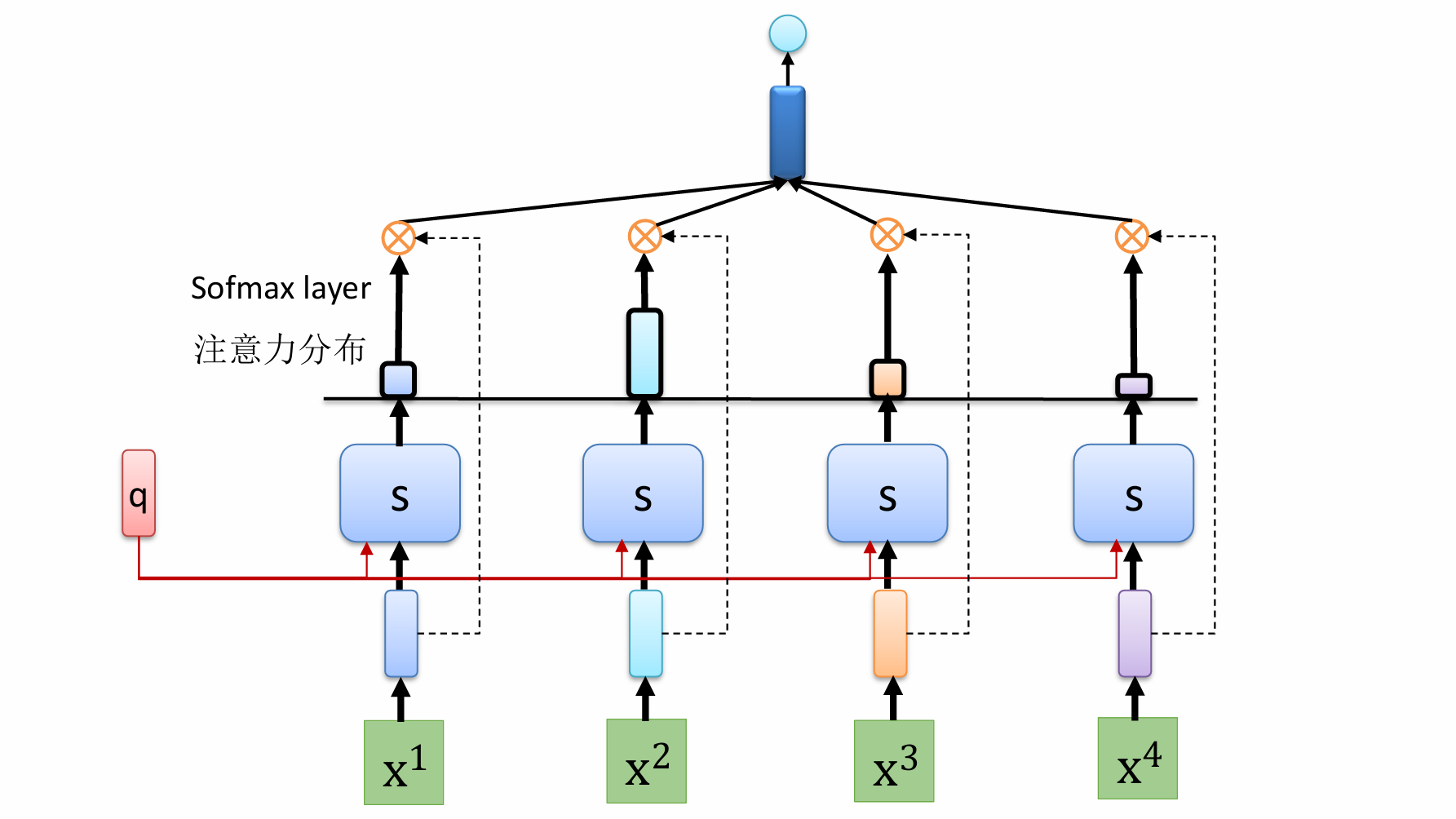
自然语言处理——循环神经网络
自然语言处理——循环神经网络 循环神经网络应用到基于机器学习的自然语言处理任务序列到类别同步的序列到序列模式异步的序列到序列模式 参数学习和长程依赖问题基于门控的循环神经网络门控循环单元(GRU)长短期记忆神经网络(LSTM)…...
)
是否存在路径(FIFOBB算法)
题目描述 一个具有 n 个顶点e条边的无向图,该图顶点的编号依次为0到n-1且不存在顶点与自身相连的边。请使用FIFOBB算法编写程序,确定是否存在从顶点 source到顶点 destination的路径。 输入 第一行两个整数,分别表示n 和 e 的值(1…...

Rapidio门铃消息FIFO溢出机制
关于RapidIO门铃消息FIFO的溢出机制及其与中断抖动的关系,以下是深入解析: 门铃FIFO溢出的本质 在RapidIO系统中,门铃消息FIFO是硬件控制器内部的缓冲区,用于临时存储接收到的门铃消息(Doorbell Message)。…...

SiFli 52把Imagie图片,Font字体资源放在指定位置,编译成指定img.bin和font.bin的问题
分区配置 (ptab.json) img 属性介绍: img 属性指定分区存放的 image 名称,指定的 image 名称必须是当前工程生成的 binary 。 如果 binary 有多个文件,则以 proj_name:binary_name 格式指定文件名, proj_name 为工程 名&…...