ESKF算法融合GNSS与IMU信息,航向角的偏差是如何逐渐影响到重力加速度g以及位置偏差的 CSDN gpt
1##############################ESKF算法融合GNSS与IMU信息,航向角的偏差是如何逐渐影响到重力加速度g以及位置偏差的 CSDN gpt
航向角的偏差会逐渐影响重力加速度和位置偏差。首先,航向角的偏差会影响重力加速度的测量值。在ESKF算法中,通过将IMU测量的加速度分解为重力加速度和线性加速度,然后使用航向角来进行旋转补偿。如果航向角有偏差,那么旋转补偿就会引入误差,从而影响到重力加速度的估计值。
其次,重力加速度的误差会进一步影响位置的估计。ESKF算法中利用IMU的加速度数据来进行位置的预测。如果重力加速度有偏差,那么在位置预测过程中就会引入误差。这样随着时间的推移,这些位置误差会逐渐累积,导致位置的偏差增大。
#2 CSDN GPT
用公式证明ESKF算法融合GNSS与IMU信息,航向角的偏差是如何逐渐影响到重力加速度g以及位置偏差的
ESKF(Error-State Kalman Filter)算法是一种用于融合GNSS(Global Navigation Satellite System)和IMU(Inertial Measurement Unit)信息的滤波算法。它通过估计系统状态的误差来校正和优化初始状态的估计值。下面是用公式证明ESKF算法如何融合GNSS与IMU信息,并说明航向角的偏差如何逐渐影响重力加速度g和位置偏差的。
在ESKF算法中,状态向量x包含位置、速度、姿态和陀螺仪和加速度计的偏差等信息。它的更新过程可以通过以下公式表示:
x̂ₖ⁺ = Fₖ₋₁x̂ₖ₋₁ + Gₖ₋₁Δuₖ₋₁
Pₖ⁺ = Fₖ₋₁Pₖ₋₁Fₖ₋₁ᵀ + Qₖ₋₁
其中,x̂ₖ⁺是后验状态估计,Pₖ⁺是后验状态协方差矩阵,Fₖ₋₁是状态转移矩阵,Gₖ₋₁是输入矩阵,Δuₖ₋₁是IMU测量误差,Qₖ₋₁是过程噪声协方差矩阵。
对于GNSS测量,可以通过以下公式将其融合到状态估计中:
Kₖ = Pₖ⁺Hₖᵀ(HPₖ⁺Hₖᵀ + Rₖ)⁻¹
x̂ₖ = x̂ₖ⁺ + Kₖ(zₖ - Hₖx̂ₖ⁺)
Pₖ = (I - KₖHₖ)Pₖ⁺
其中,Kₖ是卡尔曼增益,Hₖ是观测矩阵,Rₖ是GNSS测量误差协方差矩阵,zₖ是GNSS测量值。
航向角的偏差会逐渐影响重力加速度g和位置偏差。由于航向角的偏差会导致方向的错误,这将进一步影响加速度计测量的准确性和重力加速度的估计。重力加速度g在算法中用于校正位置估计,并且位置估计的误差将随着时间的推移而累积。因此,航向角的偏差会逐渐影响位置偏差。
###########################################################
3 baidu 文心一言 GPT
ESKF(Error-State Kalman Filter)是一种常用于融合GNSS(全球导航卫星系统)与IMU(惯性测量单元)信息的算法。在ESKF中,我们主要关注状态的误差,而不是状态本身。航向角的偏差会逐渐影响到重力加速度g以及位置偏差,这可以通过公式推导得到。
首先,我们考虑一个简化的IMU模型,其中加速度计和陀螺仪的读数分别为a和ω,它们与真实值a_true和ω_true之间的关系为:
a = a_true + b_a + n_a
ω = ω_true + b_ω + n_ω
其中,b_a和b_ω是偏置,n_a和n_ω是噪声。
接下来,我们将这些读数用于计算速度和位置。在离散时间系统中,速度和位置的更新方程为:
v[k+1] = v[k] + dt * (a[k] - b_a[k])
p[k+1] = p[k] + dt * v[k+1]
其中,dt是时间步长。
现在,我们考虑航向角θ的偏差。如果θ有一个恒定的偏差Δθ,那么加速度计和陀螺仪的读数将变为:
a_rotated = a_true + Δθ × g + b_a + n_a
ω_rotated = ω_true + b_ω + n_ω
将这些读数用于计算速度和位置,我们得到:
v_rotated[k+1] = v_rotated[k] + dt * (a_rotated[k] - b_a[k])
p_rotated[k+1] = p_rotated[k] + dt * v_rotated[k+1]
注意到,由于加速度计读数中包含了Δθ × g的项,因此航向角的偏差会逐渐影响到重力加速度g。同时,由于速度和位置的更新方程中使用了有偏的加速度计读数,因此航向角的偏差也会逐渐影响到位置偏差。
为了更清晰地看到这一点,我们可以将速度和位置的更新方程在Δθ较小时进行线性化,得到:
v_rotated[k+1] ≈ v[k+1] + Δθ[k] × g × dt
p_rotated[k+1] ≈ p[k+1] + Δθ[k] × g × dt^2 / 2
这表明,航向角的偏差会导致速度和位置出现与Δθ成比例的偏差。因此,通过ESKF算法融合GNSS与IMU信息时,我们需要考虑航向角偏差的影响。
相关文章:

ESKF算法融合GNSS与IMU信息,航向角的偏差是如何逐渐影响到重力加速度g以及位置偏差的 CSDN gpt
1##############################ESKF算法融合GNSS与IMU信息,航向角的偏差是如何逐渐影响到重力加速度g以及位置偏差的 CSDN gpt 航向角的偏差会逐渐影响重力加速度和位置偏差。首先,航向角的偏差会影响重力加速度的测量值。在ESKF算法中,通过将IMU测…...
Java初始化大量数据到Neo4j中(二)
接Java初始化大量数据到Neo4j中(一)继续探索,之前用create命令导入大量数据发现太过耗时,查阅资料说大量数据初始化到Neo4j需要使用neo4j-admin import 业务数据说明可以参加Java初始化大量数据到Neo4j中(一),这里主要是将处理好的节点数据和…...

flink1.17安装
Flink1.17安装 官网地址: https://nightlies.apache.org/flink/flink-docs-release-1.17/zh//docs/try-flink/local_installation/ 安装jdk11 ps:只能安装openjdk11,昨天安装的oracle jdk17,结果怎么也运行不起来。 sudo apt …...
SLAM从入门到精通(gmapping建图)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 前面我们介绍了hector slam建图。相对而言,hector slam建图对数据的要求比较低,只需要lidar数据就可以建图了。但是hector …...
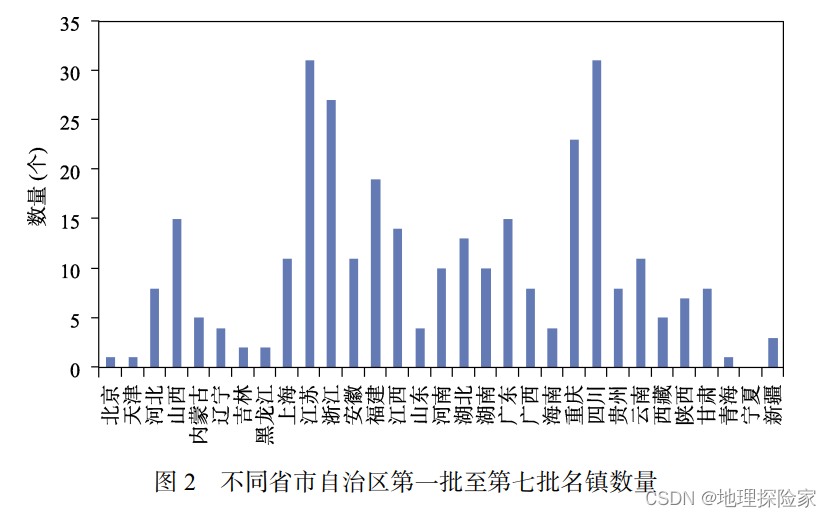
中国312个历史文化名镇及景区空间点位数据集
一部中华史,既是人类创造丰富物质财富的奋头史,又是与自然共生共存的和谐史不仅留存下悠久丰富的人文思想和情怀,还在各处镌刻下可流传的生活场景,历史文化名镇(以下简称:名镇)就是这样真实的历史画卷。“镇”是一方的政治文化中心…...

记一次Mybatis驼峰命名导致的线上BUG及处理方案
前言 方向从一开始就错了,还是执着的去寻找问题的解决方案,简直就是一场重大灾难,但这也是每个修行者的必由之路。这个线上问题,差点让我的心里防线崩溃,苦寻无门,最终得以解决也多亏了身边的各路大佬的群…...

在MyBatisPlus中添加分页插件
开发过程中,数据量大的时候,查询效率会有所下降,这时,我们往往会使用分页。 具体操作入下: 1、添加分页插件: package com.zhang.config;import com.baomidou.mybatisplus.extension.plugins.Pagination…...

算法题系列8·买卖股票的最佳时机
目录 题目描述 实现 提交结果 题目描述 给定一个数组 prices ,它的第 i 个元素 prices[i] 表示一支给定股票第 i 天的价格。 你只能选择 某一天 买入这只股票,并选择在 未来的某一个不同的日子 卖出该股票。 设计一个算法来计算你所能获取的最大利润。…...

DC电源模块关于宽电压输入和输出的范围
BOSHIDA DC电源模块关于宽电压输入和输出的范围 DC电源模块是一种电子设备,能够将输入的直流电源转换成所需的输出电源,用于供电各种电子设备。其中,关于宽电压输入和输出的范围,是DC电源模块常见的设计要求之一。本文将详细介绍…...

【Docker】docker拉取镜像错误 missing signature key
问题 当我使用docker拉取一个特定的镜像时,提示错误: 错误 missing signature key 但是拉取其他镜像又可以访问,,,,于是,我怀疑是否是docker版本问题。 docker --version结果确实࿰…...

C- 静态链接
静态链接意味着在编译时将所有库函数直接嵌入到最终的可执行文件中,而不是在运行时通过共享库来动态链接这些函数。静态链接的结果是一个更大的可执行文件,因为它包含了所有必要的代码,但它可以在没有外部依赖的情况下独立运行。 下面是一个…...

微信公众号开发(BUG集)
1.微信公众平台接口错误:不合法的自定义菜单使用用户 地址:解决地址 2.微信公众平台接口错误:invalid ip 180.101.72.196 ipv6 ::ffff:180.101.72.196, not in whitelist rid: 6511420b-60c59249-01084d02 白名单离开放服务器IP...
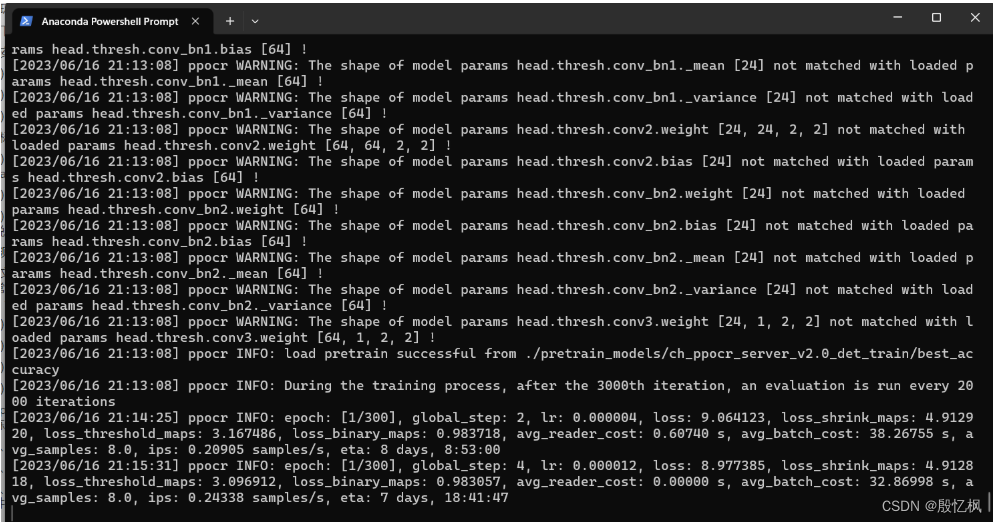
AI项目十三:PaddleOCR训练自定义数据集
若该文为原创文章,转载请注明原文出处。 续上一篇,PaddleOCR环境搭建好了,并测试通过,接下来训练自己的检测模型和识别模型。 paddleocr检测模型训练 1、准备数据集 在PaddleOCR目录下新建文件夹:train_data, 这个…...
你熟悉Docker吗?
你熟悉Docker吗? 文章目录 你熟悉Docker吗?快速入门Docker安装1.卸载旧版2.配置Docker的yum库3.安装Docker4.启动和校验5.配置镜像加速5.1.注册阿里云账号5.2.开通镜像服务5.3.配置镜像加速 部署MySQL镜像和容器命令解读 Docker基础常用命令数据卷数据卷…...

Nodejs错误处理详细指南
Nodejs错误处理详细指南 学习 Node.js 中的高级错误处理技术,以增强应用程序的可靠性和稳定性。 在 Node.js 中,我们可以使用各种技术和方法来处理错误,可以查看这篇文章。错误处理是任何 Node.js 应用程序的一个重要方面。正确管理错误可以…...

软考 系统架构设计师系列知识点之软件架构风格
这个十一注定是一个不能放松、保持“紧”的十一。由于报名了全国计算机技术与软件专业技术资格(水平)考试,11月4号就要考试,因此8天长假绝不能荒废,必须要好好利用起来。现在将各个核心知识点一一进行提炼并做记录。 所…...
一键智能视频语音转文本——基于PaddlePaddle语音识别与Python轻松提取视频语音并生成文案
前言 如今进行入自媒体行业的人越来越多,短视频也逐渐成为了主流,但好多时候是想如何把视频里面的语音转成文字,比如,录制会议视频后,做会议纪要;比如,网课教程视频,想要做笔记&…...

[unity]对象的序列化
序 抽象的图纸叫类,包含具体数据的叫对象。 类的序列化和反序列化 using System.Collections; using System.Collections.Generic; using UnityEngine;using System; using System.IO; using System.Runtime.Serialization.Formatters.Binary; [Serializabl…...

java开发岗位面试
java开发岗位面试 技术栈:springboot框架+redis 个人笔试/技术面问题整理 1、SpringBoot有什么组件? 举例说几个: ①auto-configuration组件:核心特征。其约定大于配置思想,赋予了SpringBoot开箱即用的强…...

坠落防护 挂点装置
声明 本文是学习GB 30862-2014 坠落防护 挂点装置. 而整理的学习笔记,分享出来希望更多人受益,如果存在侵权请及时联系我们 1 范围 本标准规定了高处坠落防护挂点装置的技术要求、检验方法、检验规则及标识。 本标准适用于防护高处坠落的挂点装置。 本标准不适用于体育及消…...

除了排错,你可能不知道OPC Expert v8.1还能做这些:数据归档、计算与冗余实战
解锁OPC Expert v8.1的隐藏潜力:数据归档、实时计算与冗余架构实战指南在工业自动化领域,OPC Expert常被视为故障排查的"急救箱",但它的能力远不止于此。当大多数工程师还在用它解决DCOM配置问题时,少数先行者已经用它重…...

组态王通用扫码枪配置
使用组态王扫码枪驱动,是绑定变量,扫码后直接就可以显示扫码内容。解决每次扫码输入数据时必须先用鼠标点进输入框内的问题。驱动安装先添加驱动,亚控网站的文件为 barcodescanner,这个文件是组态王通用扫码枪的驱动,但…...

Burp Suite证书安装全解:HTTPS抓包失败的根源与跨平台命令行方案
1. 为什么必须亲手安装Burp Suite证书——不是“点一下就完事”的操作很多人第一次在手机或测试设备上配置Burp Suite代理时,会下意识认为:只要把电脑上的Burp监听地址填进Wi-Fi代理设置,再用浏览器访问http://burp,点击那个绿色的…...

危急时刻的六条基本安全提示
人机协作,AI模型:Deepseek 仅供参考 危急时刻的六条基本安全提示 以下内容仅为通用性安全建议,供在紧急情况下保持冷静、保护自身安全时参考。所有建议均基于常理和公共安全常识,不包含任何具体操作细节或可能被不当使用的信息…...

基于Arduino与蓝牙模块的六路无线开关控制系统设计与实现
1. 项目概述:用手机蓝牙控制六路LED想不想把手机变成一个无线遥控器,随手一点就能开关家里的灯带、氛围灯,甚至是其他电器?这个项目就是为你准备的。它基于一块功能增强的Arduino兼容板——GlowDuino Uno,配合一个极其…...

基于Jetson Nano与JNEEG Shield的脑电信号采集与边缘AI处理实战
1. 项目概述:低成本脑机接口的硬件基石 如果你对脑机接口、生物信号处理或者边缘AI应用感兴趣,但又苦于专业设备动辄数万甚至数十万的高昂门槛,那么JNEEG Shield的出现,可能会为你打开一扇新的大门。这是一个专为NVIDIA Jetson Na…...
)
大模型测试新范式:Claude端到端验证的5层断言体系(语义一致性/上下文连贯性/安全边界/成本阈值/时序鲁棒性)
更多请点击: https://codechina.net 第一章:大模型测试新范式:Claude端到端验证的5层断言体系(语义一致性/上下文连贯性/安全边界/成本阈值/时序鲁棒性) 传统LLM测试常聚焦于准确率或BLEU等静态指标,而Cla…...

终极虚拟显示器解决方案:ParsecVDisplay完整使用指南
终极虚拟显示器解决方案:ParsecVDisplay完整使用指南 【免费下载链接】parsec-vdd ✨ Perfect virtual display for game streaming 项目地址: https://gitcode.com/gh_mirrors/pa/parsec-vdd ParsecVDisplay是一个基于Parsec虚拟显示驱动(VDD)的独立应用程序…...

3分钟快速上手:bilibili-parse视频解析API终极指南
3分钟快速上手:bilibili-parse视频解析API终极指南 【免费下载链接】bilibili-parse bilibili Video API 项目地址: https://gitcode.com/gh_mirrors/bi/bilibili-parse bilibili-parse是一款高效专业的B站视频解析工具,为开发者和内容创作者提供…...

Redis在线工具终极指南:3分钟学会数据库操作,无需安装配置
Redis在线工具终极指南:3分钟学会数据库操作,无需安装配置 【免费下载链接】try.redis A demonstration of the Redis database. 项目地址: https://gitcode.com/gh_mirrors/tr/try.redis 还在为Redis环境配置而烦恼吗?还在为测试一个…...