《视觉 SLAM 十四讲》V2 第 4 讲 李群与李代数 【什么样的相机位姿 最符合 当前观测数据】
P71
文章目录
- 4.1 李群与李代数基础
- 4.1.3 李代数的定义
- 4.1.4 李代数 so(3)
- 4.1.5 李代数 se(3)
- 4.2 指数与对数映射
- 4.2.1 SO(3)上的指数映射
- 罗德里格斯公式推导
- 4.2.2 SE(3) 上的指数映射
- SO(3),SE(3),so(3),se(3)的对应关系
- 4.3 李代数求导与扰动模型
- 4.3.2 SO(3)上的李代数求导
- 4.3.3 李代数求导
- 4.3.4 扰动模型(左乘)【更简单 的导数计算模型】
- 4.3.5 SE(3)上的李代数求导
- 4.4 Sophus应用 【Code】
- 4.4.2 评估轨迹的误差 【Code】
- 4.5 相似变换群 与 李代数
- 习题
- 题1
- 题2
- 题4
- √ 题5
- √ 题6
- 6.2 SE(3)伴随性质
- √ 题7
- √ 题8
- LaTex

什么样的相机位姿 最符合 当前观测数据。
求解最优的 R , t \bm{R, t} R,t, 使得误差最小化。
4.1 李群与李代数基础

群: 只有一个(良好的)运算的集合。



封结幺逆 、 丰俭由你

李群: 具有连续(光滑)性质的群。



在 t = 0 附近,旋转矩阵可以由 e x p ( ϕ 0 ˆ t ) exp(\phi_0\^{}t) exp(ϕ0ˆt)计算得到
4.1.3 李代数的定义

李代数 描述了李群的局部性质
- 单位元 附近的正切空间。
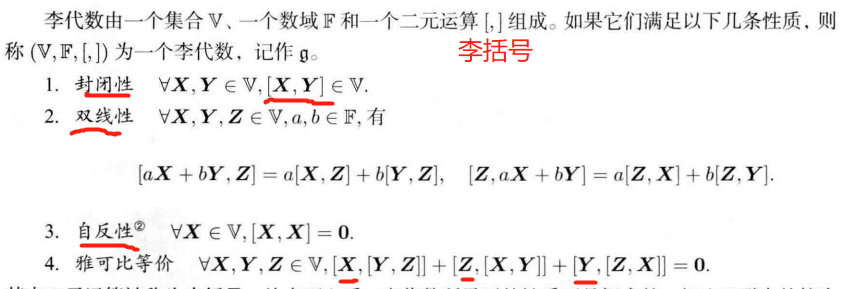
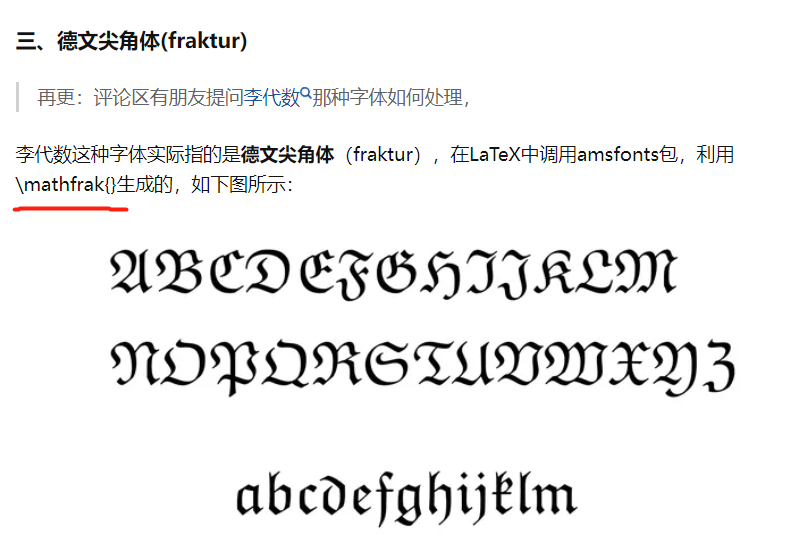
g = ( R 3 , R , × ) \mathfrak{g}=(\mathbb{R}^3, \mathbb{R}, \times) g=(R3,R,×)构成了一个李代数
4.1.4 李代数 so(3)
s o ( 3 ) \mathfrak{so}(3) so(3): 一个由三维向量组成的集合,每个向量对应一个反对称矩阵,可以用于表达旋转矩阵的导数。
s o ( 3 ) = { ϕ ∈ R 3 , Φ = ϕ ˆ ∈ R 3 × 3 } \mathfrak{so}(3)=\{\phi\in\mathbb{R}^3,\bm{\Phi}=\phi\^{}\in\mathbb{R}^{3\times3}\} so(3)={ϕ∈R3,Φ=ϕˆ∈R3×3}


4.1.5 李代数 se(3)
李群 S E ( 3 ) SE(3) SE(3) 对应的李代数 s e ( 3 ) \mathfrak{se}(3) se(3)



4.2 指数与对数映射
4.2.1 SO(3)上的指数映射
s o ( 3 ) \mathfrak{so}(3) so(3): 旋转向量 组成的空间
指数映射: 罗德里格斯公式
R = e x p ( ϕ ∧ ) = e x p ( θ a ∧ ) = c o s θ I + ( 1 − c o s θ ) a a T + s i n θ a ∧ \bm{R}=exp(\phi^{\land})=exp(\theta\bm{a}^{\land})=cos\theta\bm{I} + (1-cos\theta)\bm{a}\bm{a}^T+sin\theta\bm{a}^{\land} R=exp(ϕ∧)=exp(θa∧)=cosθI+(1−cosθ)aaT+sinθa∧
对数映射: 李群 S O ( 3 ) SO(3) SO(3) 中的元素 ——> 李代数 s o ( 3 ) \mathfrak{so}(3) so(3)

把旋转角固定在 ± π ±\pi ±π 之间,则李群和李代数 元素 一一对应。
————————————————
罗德里格斯公式推导

e x p ( ϕ ∧ ) = e x p ( θ a ∧ ) = ∑ n = 0 ∞ 1 n ! ( θ a ∧ ) n n = 0 , 1 , 2 , 3 , . . . 原式 = I + θ a ∧ + 1 2 ! θ 2 a ∧ a ∧ + 1 3 ! θ 3 a ∧ a ∧ a ∧ + 1 4 ! θ 4 ( a ∧ ) 4 + ⋅ ⋅ ⋅ 将 a ∧ a ∧ = a a T − I ; a ∧ a ∧ a ∧ = ( a ∧ ) 3 = − a ∧ 代入 原式 = a a T − a ∧ a ∧ + θ a ∧ + 1 2 ! θ 2 a ∧ a ∧ − 1 3 ! θ 3 a ∧ − 1 4 ! θ 4 ( a ∧ ) 2 + ⋅ ⋅ ⋅ = a a T + ( θ − 1 3 ! θ 3 + 1 5 ! θ 5 − ⋅ ⋅ ⋅ ) a ∧ − ( 1 − 1 2 ! θ 2 + 1 4 ! θ 4 − ⋅ ⋅ ⋅ ) a ∧ a ∧ = a ∧ a ∧ + I + s i n θ a ∧ − c o s θ a ∧ a ∧ = ( 1 − c o s θ ) a ∧ a ∧ + I + s i n θ a ∧ = ( 1 − c o s θ ) ( a a T − I ) + I + s i n θ a ∧ = c o s θ I + ( 1 − c o s θ ) a a T + s i n θ a ∧ \begin{align*}exp(\phi^{\land}) &=exp(\theta\bm{a}^{\land})=\sum\limits_{n=0}^{\infty}\frac{1}{n!} (\theta\bm{a}^{\land})^n \\ & n = 0, 1, 2, 3, ... \\ 原式 & = \bm{I} + \theta\bm{a}^{\land} + \frac{1}{2!}\theta^2\bm{a}^{\land}\bm{a}^{\land} + \frac{1}{3!}\theta^3\bm{a}^{\land}\bm{a}^{\land}\bm{a}^{\land} +\frac{1}{4!}\theta^4(\bm{a}^{\land})^4+···\\ & 将\bm{a}^{\land}\bm{a}^{\land} = \bm{a}\bm{a}^T - \bm{I}; \bm{a}^{\land}\bm{a}^{\land}\bm{a}^{\land} = (\bm{a}^{\land})^3 =-\bm{a}^{\land} 代入 \\ 原式& = \bm{a}\bm{a}^T - \bm{a}^{\land}\bm{a}^{\land} + \theta\bm{a}^{\land} + \frac{1}{2!}\theta^2\bm{a}^{\land}\bm{a}^{\land}-\frac{1}{3!}\theta^3\bm{a}^{\land}-\frac{1}{4!}\theta^4(\bm{a}^{\land})^2+···\\ & = \bm{a}\bm{a}^T + (\theta - \frac{1}{3!}\theta^3+\frac{1}{5!}\theta^5-···)\bm{a}^{\land}-(1-\frac{1}{2!}\theta^2+\frac{1}{4!}\theta^4-···)\bm{a}^{\land}\bm{a}^{\land}\\ & = \bm{a}^{\land}\bm{a}^{\land} + \bm{I}+sin\theta \bm{a}^{\land}-cos\theta\bm{a}^{\land}\bm{a}^{\land}\\ &=(1-cos\theta)\bm{a}^{\land}\bm{a}^{\land}+\bm{I} + sin\theta\bm{a}^{\land}\\ &= (1-cos\theta)(\bm{a}\bm{a}^T-\bm{I})+\bm{I} + sin\theta\bm{a}^{\land}\\ & = cos\theta\bm{I}+ (1-cos\theta)\bm{a}\bm{a}^T + sin\theta\bm{a}^{\land} \end{align*} exp(ϕ∧)原式原式=exp(θa∧)=n=0∑∞n!1(θa∧)nn=0,1,2,3,...=I+θa∧+2!1θ2a∧a∧+3!1θ3a∧a∧a∧+4!1θ4(a∧)4+⋅⋅⋅将a∧a∧=aaT−I;a∧a∧a∧=(a∧)3=−a∧代入=aaT−a∧a∧+θa∧+2!1θ2a∧a∧−3!1θ3a∧−4!1θ4(a∧)2+⋅⋅⋅=aaT+(θ−3!1θ3+5!1θ5−⋅⋅⋅)a∧−(1−2!1θ2+4!1θ4−⋅⋅⋅)a∧a∧=a∧a∧+I+sinθa∧−cosθa∧a∧=(1−cosθ)a∧a∧+I+sinθa∧=(1−cosθ)(aaT−I)+I+sinθa∧=cosθI+(1−cosθ)aaT+sinθa∧
e x p ( θ a ∧ ) = c o s θ I + ( 1 − c o s θ ) a a T + s i n θ a ∧ exp(\theta\bm{a}^{\land})=cos\theta\bm{I} + (1-cos\theta)\bm{a}\bm{a}^T+sin\theta\bm{a}^{\land} exp(θa∧)=cosθI+(1−cosθ)aaT+sinθa∧
—————

$\bm{a}^{\land}$
a ∧ \bm{a}^{\land} a∧
————————————————
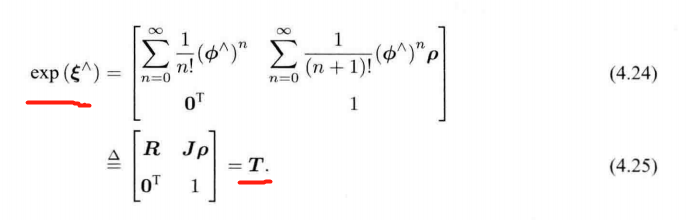
4.2.2 SE(3) 上的指数映射
——————
推导:
∑ n = 0 ∞ 1 ( n + 1 ) ! ( ϕ ∧ ) n = ∑ n = 0 ∞ 1 ( n + 1 ) ! ( θ a ∧ ) n = I + 1 2 ! θ a ∧ + 1 3 ! θ 2 ( a ∧ ) 2 + 1 4 ! θ 3 ( a ∧ ) 3 + 1 5 ! θ 4 ( a ∧ ) 4 + ⋅ ⋅ ⋅ = 1 θ ( 1 2 ! θ 2 − 1 4 ! θ 4 + ⋅ ⋅ ⋅ ) a ∧ + 1 θ ( 1 3 ! θ 3 − 1 5 ! θ 5 + ⋅ ⋅ ⋅ ) ( a ∧ ) 2 + I = 1 θ ( 1 − c o s θ ) a ∧ + 1 θ ( θ − s i n θ ) ( a a T − I ) + I = s i n θ θ I + ( 1 − s i n θ θ ) a a T + 1 − c o s θ θ a ∧ = d e f J \begin{align*} \sum\limits_{n=0}^{\infty}\frac{1}{(n+1)!}(\phi^{\land})^n &= \sum\limits_{n=0}^{\infty}\frac{1}{(n+1)!}(\theta\bm{a}^{\land})^n\\ & = \bm{I} + \frac{1}{2!}\theta\bm{a}^{\land} + \frac{1}{3!}\theta^2(\bm{a}^{\land})^2 + \frac{1}{4!}\theta^3(\bm{a}^{\land})^3 + \frac{1}{5!}\theta^4(\bm{a}^{\land})^4+···\\ & = \frac{1}{\theta}( \frac{1}{2!}\theta^2- \frac{1}{4!}\theta^4+···)\bm{a}^{\land} + \frac{1}{\theta}( \frac{1}{3!}\theta^3- \frac{1}{5!}\theta^5+···)(\bm{a}^{\land})^2+\bm{I} \\ & = \frac{1}{\theta}( 1-cos\theta)\bm{a}^{\land} + \frac{1}{\theta}(\theta-sin\theta)(\bm{a}\bm{a}^T-\bm{I})+\bm{I} \\ & = \frac{sin\theta}{\theta}\bm{I}+(1-\frac{sin\theta}{\theta})\bm{a}\bm{a}^T + \frac{1-cos\theta}{\theta}\bm{a}^{\land}\\ & \overset{\mathrm{def}}{=} \bm{J} \end{align*} n=0∑∞(n+1)!1(ϕ∧)n=n=0∑∞(n+1)!1(θa∧)n=I+2!1θa∧+3!1θ2(a∧)2+4!1θ3(a∧)3+5!1θ4(a∧)4+⋅⋅⋅=θ1(2!1θ2−4!1θ4+⋅⋅⋅)a∧+θ1(3!1θ3−5!1θ5+⋅⋅⋅)(a∧)2+I=θ1(1−cosθ)a∧+θ1(θ−sinθ)(aaT−I)+I=θsinθI+(1−θsinθ)aaT+θ1−cosθa∧=defJ
J = s i n θ θ I + ( 1 − s i n θ θ ) a a T + 1 − c o s θ θ a ∧ \bm{J}=\frac{sin\theta}{\theta}\bm{I}+(1-\frac{sin\theta}{\theta})\bm{a}\bm{a}^T + \frac{1-cos\theta}{\theta}\bm{a}^{\land} J=θsinθI+(1−θsinθ)aaT+θ1−cosθa∧
R = c o s θ I + ( 1 − c o s θ ) a a T + s i n θ a ∧ \bm{R}=cos\theta\bm{I}+(1-cos\theta)\bm{a}\bm{a}^T + sin\theta\bm{a}^{\land} R=cosθI+(1−cosθ)aaT+sinθa∧
————
t = J ρ \bm{t=Jρ} t=Jρ
平移部分发生了一次以 J \bm{J} J 为系数矩阵的 线性变换。
SO(3),SE(3),so(3),se(3)的对应关系

4.3 李代数求导与扰动模型
Baker-Campbell-Hausdorff公式(BCH公式)






4.3.2 SO(3)上的李代数求导
位姿由SO(3)上的旋转矩阵 或 SE(3)上的变换矩阵 描述
设某时刻机器人的位姿为 T \bm{T} T, 观察到了一个世界坐标位于 p \bm{p} p 的点,产生了一个观测数据 z \bm{z} z
计算理想的观测与实际数据之间的误差: e = z − T p \bm{e = z-Tp} e=z−Tp
假设一共有 N N N 个这样的路标点和观测,对机器人进行位姿估计,相当于寻找一个最优的 T \bm{T} T ,使得整体误差最小化:
min T J ( T ) = ∑ i = 1 N ∣ ∣ z i − T p i ∣ ∣ 2 2 \min\limits_{\bm{T}}J(\bm{T}) = \sum\limits_{i=1}^{N}||\bm{z_i-Tp_i}||_2^2 TminJ(T)=i=1∑N∣∣zi−Tpi∣∣22
求解上述问题,需要计算目标函数 J J J 关于变换矩阵 T \bm{T} T 的导数。
使用 李代数 解决 求导问题 的2种思路:
1、用李代数表示姿态,然后根据李代数加法对李代数求导。
2、对李群左乘或右乘微小扰动,然后对该扰动求导,称为左扰动和右扰动模型。
4.3.3 李代数求导

——————
推导:
∂ ( R p ) ∂ R = R 对应的李代数为 ϕ ∂ ( exp ( ϕ ∧ ) p ) ∂ ϕ = lim Δ ϕ → 0 exp ( ( ϕ + Δ ϕ ) ∧ ) p − exp ( ϕ ∧ ) p Δ ϕ 由式 ( 4.35 ) = lim Δ ϕ → 0 exp ( ( J l Δ ϕ ) ∧ ) exp ( ϕ ∧ ) p − exp ( ϕ ∧ ) p Δ ϕ = lim Δ ϕ → 0 ( I + ( J l Δ ϕ ) ∧ ) exp ( ϕ ∧ ) p − exp ( ϕ ∧ ) p Δ ϕ = lim Δ ϕ → 0 ( J l Δ ϕ ) ∧ exp ( ϕ ∧ ) p Δ ϕ a ∧ 等效于 a × , 因此根据叉乘的性质 = lim Δ ϕ → 0 − ( exp ( ϕ ∧ ) p ) ∧ J l Δ ϕ Δ ϕ = − ( R p ) ∧ J l \begin{align*}\frac{\partial(\bm{Rp})}{\partial\bm{R}} &\xlongequal{R对应的李代数为\phi}\frac{\partial(\exp(\phi^{\land})\bm{p})}{\partial\phi} \\ & = \lim\limits_{Δ\phi\to0}\frac{\exp((\phi+Δ\phi)^{\land})\bm{p}-\exp(\phi^{\land})\bm{p}}{Δ\phi} \\ & 由 式(4.35)\\ & = \lim\limits_{Δ\phi\to0}\frac{\exp((\bm{J}_lΔ\phi)^{\land})\exp(\phi^{\land})\bm{p}-\exp(\phi^{\land})\bm{p}}{Δ\phi} \\ & = \lim\limits_{Δ\phi\to0}\frac{(\bm{I}+(\bm{J}_lΔ\phi)^{\land})\exp(\phi^{\land})\bm{p}-\exp(\phi^{\land})\bm{p}}{Δ\phi} \\ & = \lim\limits_{Δ\phi\to0}\frac{(\bm{J}_lΔ\phi)^{\land}\exp(\phi^{\land})\bm{p}}{Δ\phi} \\ & a^{\land} 等效于 a \times ,因此根据叉乘的性质 \\ & = \lim\limits_{Δ\phi\to0}\frac{-(\exp(\phi^{\land})\bm{p})^{\land}\bm{J}_lΔ\phi}{Δ\phi} \\ & = -(\bm{Rp})^{\land}\bm{J}_l \end{align*} ∂R∂(Rp)R对应的李代数为ϕ∂ϕ∂(exp(ϕ∧)p)=Δϕ→0limΔϕexp((ϕ+Δϕ)∧)p−exp(ϕ∧)p由式(4.35)=Δϕ→0limΔϕexp((JlΔϕ)∧)exp(ϕ∧)p−exp(ϕ∧)p=Δϕ→0limΔϕ(I+(JlΔϕ)∧)exp(ϕ∧)p−exp(ϕ∧)p=Δϕ→0limΔϕ(JlΔϕ)∧exp(ϕ∧)pa∧等效于a×,因此根据叉乘的性质=Δϕ→0limΔϕ−(exp(ϕ∧)p)∧JlΔϕ=−(Rp)∧Jl
∂ ( exp ( ϕ ∧ ) p ) ∂ ϕ = − ( R p ) ∧ J l \frac{\partial(\exp(\phi^{\land})\bm{p})}{\partial\phi} = -(\bm{Rp})^{\land}\bm{J}_l ∂ϕ∂(exp(ϕ∧)p)=−(Rp)∧Jl
——————
4.3.4 扰动模型(左乘)【更简单 的导数计算模型】
对 R \bm{R} R 进行一次扰动 Δ R Δ\bm{R} ΔR ,看结果对于 扰动的变化率。
设左扰动 Δ R Δ\bm{R} ΔR 对应的李代数 为 φ \varphi φ
∂ ( R p ) ∂ φ = lim φ → 0 exp ( φ ∧ ) exp ( ϕ ∧ ) p − exp ( ϕ ∧ ) p φ = lim φ → 0 ( I + φ ∧ ) exp ( ϕ ∧ ) p − exp ( ϕ ∧ ) p φ = lim φ → 0 φ ∧ exp ( ϕ ∧ ) p φ = lim φ → 0 φ ∧ R p φ = lim φ → 0 − ( R p ) ∧ φ φ = − ( R p ) ∧ \begin{align*}\frac{\partial(\bm{Rp})}{\partial\varphi} &= \lim\limits_{\varphi\to0}\frac{\exp(\varphi^{\land})\exp(\phi^{\land})\bm{p}-\exp(\phi^{\land})\bm{p}}{\varphi}\\ &= \lim\limits_{\varphi\to0}\frac{(\bm{I} + \varphi^{\land})\exp(\phi^{\land})\bm{p}-\exp(\phi^{\land})\bm{p}}{\varphi}\\ &= \lim\limits_{\varphi\to0}\frac{\varphi^{\land}\exp(\phi^{\land})\bm{p}}{\varphi}\\ &= \lim\limits_{\varphi\to0}\frac{\varphi^{\land}\bm{Rp}}{\varphi}\\ &= \lim\limits_{\varphi\to0}\frac{-(\bm{Rp})^{\land}\varphi}{\varphi}\\ &= -(\bm{Rp})^{\land} \end{align*} ∂φ∂(Rp)=φ→0limφexp(φ∧)exp(ϕ∧)p−exp(ϕ∧)p=φ→0limφ(I+φ∧)exp(ϕ∧)p−exp(ϕ∧)p=φ→0limφφ∧exp(ϕ∧)p=φ→0limφφ∧Rp=φ→0limφ−(Rp)∧φ=−(Rp)∧
4.3.5 SE(3)上的李代数求导
假设某空间点 p \bm{p} p 经过一次变换 T \bm{T} T (对应李代数为 ξ \bm{\xi} ξ), 得到 T p \bm{Tp} Tp
现在给 T \bm{T} T 左乘一个扰动 Δ T = exp ( Δ ξ ∧ ) Δ\bm{T} = \exp(Δ\bm{\xi}^{\land}) ΔT=exp(Δξ∧)
设扰动项的李代数为 Δ ξ = [ Δ ρ , Δ ϕ ] T Δ\bm{\xi}=[Δ\bm{\rho},Δ\bm{\phi}]^T Δξ=[Δρ,Δϕ]T,则

∂ ( T p ) ∂ Δ ξ = lim Δ ξ → 0 exp ( Δ ξ ∧ ) exp ( ξ ∧ ) p − exp ( ξ ∧ ) p Δ ξ = lim Δ ξ → 0 ( I + Δ ξ ∧ ) exp ( ξ ∧ ) p − exp ( ξ ∧ ) p Δ ξ = lim Δ ξ → 0 Δ ξ ∧ exp ( ξ ∧ ) p Δ ξ = lim Δ ξ → 0 [ Δ ϕ ∧ Δ ρ 0 T 0 ] [ R p + t 1 ] Δ ξ = lim Δ ξ → 0 [ Δ ϕ ∧ ( R p + t ) + Δ ρ 0 T ] [ Δ ρ , Δ ϕ ] T = [ I − ( R p + t ) ∧ 0 T 0 T ] = d e f ( T p ) ⨀ \begin{align*}\frac{\partial(\bm{Tp})}{\partial{Δ\bm{\xi}}} &= \lim\limits_{Δ\bm{\xi}\to0}\frac{\exp(Δ\bm{\xi}^{\land})\exp(\bm{\xi}^{\land})\bm{p}-\exp(\bm{\xi}^{\land})\bm{p}}{Δ\bm{\xi}} \\ &= \lim\limits_{Δ\bm{\xi}\to0}\frac{(\bm{I} +Δ\bm{\xi}^{\land})\exp(\bm{\xi}^{\land})\bm{p}-\exp(\bm{\xi}^{\land})\bm{p}}{Δ\bm{\xi}} \\ &= \lim\limits_{Δ\bm{\xi}\to0}\frac{Δ\bm{\xi}^{\land}\exp(\bm{\xi}^{\land})\bm{p}}{Δ\bm{\xi}} \\ &=\lim\limits_{Δ\bm{\xi}\to0} \frac{\begin{bmatrix} Δ\bm{\phi}^{\land} & \Delta\bm{\rho}\\ \bm{0}^T & 0 \end{bmatrix}\begin{bmatrix} \bm{Rp+t}\\ 1 \end{bmatrix}}{Δ\bm{\xi}}\\ &=\lim\limits_{Δ\bm{\xi}\to0} \frac{\begin{bmatrix} \Delta\bm{\phi}^{\land}(\bm{Rp+t})+\Delta\bm{\rho}\\ \bm{0}^T \end{bmatrix}}{[Δ\bm{\rho},Δ\bm{\phi}]^T} \\ & = \begin{bmatrix} \bm{I} & -(\bm{Rp+t})^{\land} \\ \bm{0}^T & \bm{0}^T \end{bmatrix} \\ &\overset{\mathrm{def}}{=}(\bm{Tp})^{\bigodot} \end{align*} ∂Δξ∂(Tp)=Δξ→0limΔξexp(Δξ∧)exp(ξ∧)p−exp(ξ∧)p=Δξ→0limΔξ(I+Δξ∧)exp(ξ∧)p−exp(ξ∧)p=Δξ→0limΔξΔξ∧exp(ξ∧)p=Δξ→0limΔξ[Δϕ∧0TΔρ0][Rp+t1]=Δξ→0lim[Δρ,Δϕ]T[Δϕ∧(Rp+t)+Δρ0T]=[I0T−(Rp+t)∧0T]=def(Tp)⨀

$\overset{\mathrm{def}}{=}(\bm{Tp})^{\bigodot}$
4.4 Sophus应用 【Code】
SO(3)、SE(3)
二维运动SO(2)和SE(2)
相似变换 Sim(3)
mkdir build && cd build
cmake ..
make
./useSophus
CMakeLists.txt
cmake_minimum_required(VERSION 2.8)project(useSophus)find_package(Sophus REQUIRED)
include_directories( ${Sophus_INCLUDE_DIRS})add_executable(useSophus useSophus.cpp)
target_link_libraries(useSophus ${Sophus_LIBRARIES})
#include<iostream>
#include<cmath>
#include<Eigen/Core>
#include<Eigen/Geometry>
#include "sophus/se3.h"using namespace std;
using namespace Eigen;/* sophus 的基本用法 */
int main(int argc, char **argv){// 沿 Z轴 转90° 的旋转矩阵Matrix3d R = AngleAxisd(M_PI/2, Vector3d(0, 0, 1)).toRotationMatrix();/* 四元数 */Quaterniond q(R);Sophus::SO3 SO3_R(R);Sophus::SO3 SO3_q(q);cout << "SO(3) from matrix:\n" << SO3_R.matrix() << endl;cout << "SO(3) from quatenion:\n" << SO3_q.matrix() << endl;cout << "they are equal" << endl;return 0;
}

#include<iostream>
#include<cmath>
#include<Eigen/Core>
#include<Eigen/Geometry>
#include "sophus/se3.h"using namespace std;
using namespace Eigen;/* sophus 的基本用法 */
int main(int argc, char **argv){/* 使用 对数映射 获得 李代数*/Matrix3d R = AngleAxisd(M_PI/2, Vector3d(0, 0, 1)).toRotationMatrix();Sophus::SO3 SO3_R(R);Vector3d so3 = SO3_R.log();cout << "so3 = " << so3.transpose() << endl;// hat 向量 ——> 反对称矩阵cout << "so3 hat = \n" << Sophus::SO3::hat(so3)<< endl;// vee 反对称 ——> 向量cout << "so3 hat vee = " << Sophus::SO3::vee(Sophus::SO3::hat(so3)).transpose() << endl;Vector3d update_so3(1e-4, 0, 0);// 假设更新量为这么多Sophus::SO3 SO3_updated =Sophus::SO3::exp(update_so3) * SO3_R;cout << "SO3 updated = \n" << SO3_updated.matrix() << endl;return 0;
}

#include<iostream>
#include<cmath>
#include<Eigen/Core>
#include<Eigen/Geometry>
#include "sophus/se3.h"using namespace std;
using namespace Eigen;/* sophus SE(3) 的基本用法 */
int main(int argc, char **argv){Matrix3d R = AngleAxisd(M_PI/2, Vector3d(0, 0, 1)).toRotationMatrix(); // 沿 Z轴 旋转 90° 的旋转矩阵Vector3d t(1, 0, 0); // 沿 X 轴平移1Sophus::SE3 SE3_Rt(R, t); // 从R,t 构造 SE(3)Quaterniond q(R);Sophus::SE3 SE3_qt(q, t); // 从q, t 构造 SE(3)cout << "SE3 from R, t = \n" << SE3_Rt.matrix() << endl;cout << "SE3 from q, t = \n" << SE3_qt.matrix() << endl; /* 李代数se(3) 是一个 6 维 向量*/typedef Eigen::Matrix<double, 6, 1> Vector6d;Vector6d se3 = SE3_Rt.log();cout << "se3 = " << se3.transpose() << endl;// hat 向量 ——> 反对称矩阵cout << "se3 hat = \n" << Sophus::SE3::hat(se3)<< endl;// vee 反对称 ——> 向量cout << "se3 hat vee = " << Sophus::SE3::vee(Sophus::SE3::hat(se3)).transpose() << endl;// 更新Vector6d update_se3;// 更新量update_se3.setZero();update_se3(0, 0) = 1e-4;Sophus::SE3 SE3_updated =Sophus::SE3::exp(update_se3) * SE3_Rt;cout << "SE3 updated = \n" << SE3_updated.matrix() << endl;return 0;
}

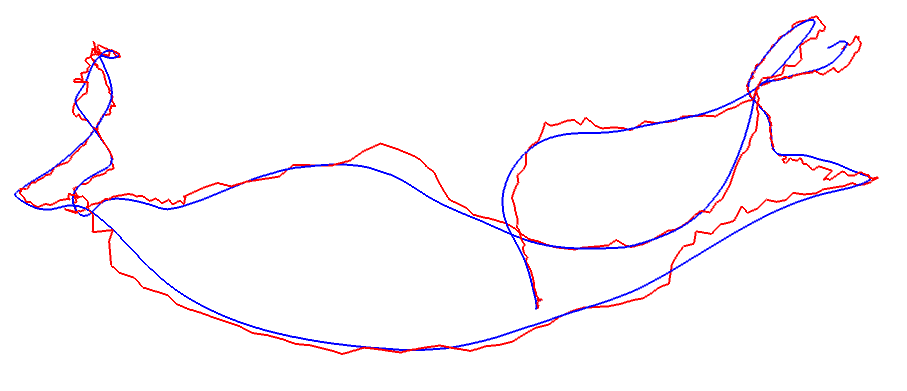
4.4.2 评估轨迹的误差 【Code】
————————
考虑一条估计轨迹 T e s t i , i \bm{T}_{esti,i} Testi,i 和真实轨迹 T g t , i \bm{T}_{gt,i} Tgt,i ,其中 i = 1 , ⋅ ⋅ ⋅ , N i= 1,···,N i=1,⋅⋅⋅,N
1、绝对误差轨迹(Absolute Trajectory Error, ATE) 旋转和平移误差
A T E a l l = 1 N ∑ i = 1 N ∣ ∣ l o g ( T g t , i − 1 T e s t i , i ) ∨ ∣ ∣ 2 2 ATE_{all}=\sqrt{\frac{1}{N}\sum\limits_{i=1}^{N}||log(\bm{T}_{gt,i}^{-1}\bm{T}_{esti,i})^{\vee}||_2^2} ATEall=N1i=1∑N∣∣log(Tgt,i−1Testi,i)∨∣∣22
- 每个位姿 李代数 的均方根误差 (Root-Mean-Squared Error,RMSE)
2、绝对平移误差(Average Translational Error)
A T E t r a n s = 1 N ∑ i = 1 N ∣ ∣ t r a n s ( T g t , i − 1 T e s t i , i ) ∣ ∣ 2 2 ATE_{trans}=\sqrt{\frac{1}{N}\sum\limits_{i=1}^{N}||trans(\bm{T}_{gt,i}^{-1}\bm{T}_{esti,i})||_2^2} ATEtrans=N1i=1∑N∣∣trans(Tgt,i−1Testi,i)∣∣22
其中 trans 表示 取括号内部变量的平移部分。
- 从整条轨迹上看,旋转出现偏差后,随后的轨迹在平移上也会出现误差。
3、相对误差
考虑 i i i 时刻到 i + Δ t i+\Delta t i+Δt 的运动,相对位姿误差(Relative Pose Error, RPE)
R P E a l l = 1 N − Δ t ∑ i = 1 N − Δ t ∣ ∣ l o g ( ( T g t , i − 1 T g t , i + Δ t ) − 1 ( T e s t i , i − 1 T e s t i , i + Δ t ) ) ∨ ∣ ∣ 2 2 RPE_{all}=\sqrt{\frac{1}{N-\Delta t}\sum\limits_{i=1}^{N-\Delta t}||log((\bm{T}_{gt,i}^{-1}\bm{T}_{gt,i+\Delta t})^{-1}(\bm{T}_{esti,i}^{-1}\bm{T}_{esti,i+\Delta t}))^{\vee}||_2^2} RPEall=N−Δt1i=1∑N−Δt∣∣log((Tgt,i−1Tgt,i+Δt)−1(Testi,i−1Testi,i+Δt))∨∣∣22
R P E t r a n s = 1 N − Δ t ∑ i = 1 N − Δ t ∣ ∣ t r a n s ( ( T g t , i − 1 T g t , i + Δ t ) − 1 ( T e s t i , i − 1 T e s t i , i + Δ t ) ) ∣ ∣ 2 2 RPE_{trans}=\sqrt{\frac{1}{N-\Delta t}\sum\limits_{i=1}^{N-\Delta t}||trans((\bm{T}_{gt,i}^{-1}\bm{T}_{gt,i+\Delta t})^{-1}(\bm{T}_{esti,i}^{-1}\bm{T}_{esti,i+\Delta t}))||_2^2} RPEtrans=N−Δt1i=1∑N−Δt∣∣trans((Tgt,i−1Tgt,i+Δt)−1(Testi,i−1Testi,i+Δt))∣∣22
————————

mkdir build && cd build
cmake ..
make
./trajectoryError
CMakeLists.txt
cmake_minimum_required(VERSION 2.8)project(trajectoryError)find_package(Sophus REQUIRED)
include_directories( ${Sophus_INCLUDE_DIRS})option(USE_UBUNTU_20 "Set to ON if you are using Ubuntu 20.04" OFF)
find_package(Pangolin REQUIRED)
if(USE_UBUNTU_20)message("You are using Ubuntu 20.04, fmt::fmt will be linked")find_package(fmt REQUIRED)set(FMT_LIBRARIES fmt::fmt)
endif()
include_directories(${Pangolin_INCLUDE_DIRS})add_executable(trajectoryError trajectoryError.cpp)
target_link_libraries(trajectoryError ${Sophus_LIBRARIES})
target_link_libraries(trajectoryError ${Pangolin_LIBRARIES} ${FMT_LIBRARIES})trajectoryError.cpp
#include <iostream>
#include <fstream>
#include <unistd.h>
#include <pangolin/pangolin.h>
#include <sophus/se3.h>using namespace Sophus;
using namespace std;string groundtruth_file = "../groundtruth.txt";
string estimated_file = "../estimated.txt";typedef vector<Sophus::SE3, Eigen::aligned_allocator<Sophus::SE3>> TrajectoryType;void DrawTrajectory(const TrajectoryType >, const TrajectoryType &esti);TrajectoryType ReadTrajectory(const string &path);int main(int argc, char **argv) {TrajectoryType groundtruth = ReadTrajectory(groundtruth_file);TrajectoryType estimated = ReadTrajectory(estimated_file);assert(!groundtruth.empty() && !estimated.empty());assert(groundtruth.size() == estimated.size());// compute rmsedouble rmse = 0;for (size_t i = 0; i < estimated.size(); i++) {Sophus::SE3 p1 = estimated[i], p2 = groundtruth[i];double error = (p2.inverse() * p1).log().norm();rmse += error * error;}rmse = rmse / double(estimated.size());rmse = sqrt(rmse);cout << "RMSE = " << rmse << endl;DrawTrajectory(groundtruth, estimated);return 0;
}TrajectoryType ReadTrajectory(const string &path) {ifstream fin(path);TrajectoryType trajectory;if (!fin) {cerr << "trajectory " << path << " not found." << endl;return trajectory;}while (!fin.eof()) {double time, tx, ty, tz, qx, qy, qz, qw;fin >> time >> tx >> ty >> tz >> qx >> qy >> qz >> qw;Sophus::SE3 p1(Eigen::Quaterniond(qw, qx, qy, qz), Eigen::Vector3d(tx, ty, tz));trajectory.push_back(p1);}return trajectory;
}void DrawTrajectory(const TrajectoryType >, const TrajectoryType &esti) {// create pangolin window and plot the trajectorypangolin::CreateWindowAndBind("Trajectory Viewer", 1024, 768);glEnable(GL_DEPTH_TEST);glEnable(GL_BLEND);glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);pangolin::OpenGlRenderState s_cam(pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0));pangolin::View &d_cam = pangolin::CreateDisplay().SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f).SetHandler(new pangolin::Handler3D(s_cam));while (pangolin::ShouldQuit() == false) {glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);d_cam.Activate(s_cam);glClearColor(1.0f, 1.0f, 1.0f, 1.0f);glLineWidth(2);for (size_t i = 0; i < gt.size() - 1; i++) {glColor3f(0.0f, 0.0f, 1.0f); // blue for ground truthglBegin(GL_LINES);auto p1 = gt[i], p2 = gt[i + 1];glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]);glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);glEnd();}for (size_t i = 0; i < esti.size() - 1; i++) {glColor3f(1.0f, 0.0f, 0.0f); // red for estimatedglBegin(GL_LINES);auto p1 = esti[i], p2 = esti[i + 1];glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]);glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);glEnd();}pangolin::FinishFrame();usleep(5000); // sleep 5 ms}}
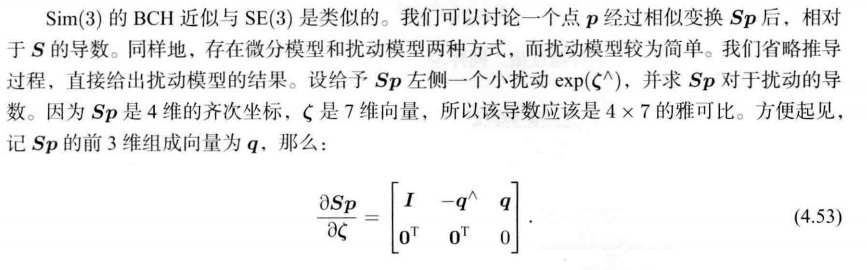
4.5 相似变换群 与 李代数
单目视觉 相似变换群Sim(3)
尺度不确定性 与 尺度漂移
对位于空间的点 p \bm{p} p ,在相机坐标系下要经过一个相似变换。
p ′ = [ s R t 0 T 1 ] p = s R p + t \bm{p}^{\prime}=\begin{bmatrix}s\bm{R} & \bm{t}\\ \bm{0}^T& 1 \end{bmatrix}\bm{p} = s\bm{Rp+t} p′=[sR0Tt1]p=sRp+t


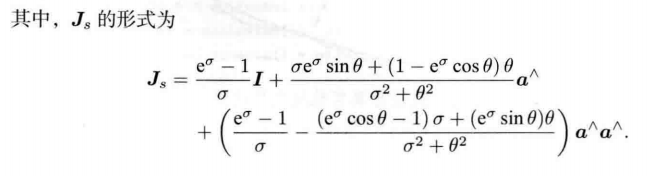

对于尺度因子,李群中的 s s s 即为李代数中 σ \sigma σ 的指数函数
4.6 小结
李群 SO(3) 和 SE(3) 以及对应的李代数 s o ( 3 ) \mathfrak{so}(3) so(3) 和 s e ( 3 ) \mathfrak{se}(3) se(3)
BCH 线性近似, 对位姿进行扰动并求导
习题


题1
验证SO(3)、SE(3)、Sim(3)关于乘法成群
特殊正交群SO(n) 旋转矩阵群
特殊欧式群SE(n) n维欧式变换



题2

题4

√ 题5

证明:
原式等效于证明 R p ∧ R T R = ( R p ) ∧ R R p ∧ I = ( R p ) ∧ R R p ∧ = ( R p ) ∧ R 对于向量 v ∈ R 3 R p ∧ v = ( R p ) ∧ R v 上式等号左边 表示向量 p , v 叉乘后所得向量根据 R 旋转。 等号右边表示 向量 p , v 分别根据 R 旋转后叉乘,显然得到同一个向量。 证毕。 \begin{align*} 原式等效于证明\\ \bm{Rp^{\land}R^TR} & = \bm{(Rp)}^{\land}\bm{R} \\ \bm{Rp^{\land}\bm{I}} & = \bm{(Rp)}^{\land}\bm{R} \\ \bm{Rp^{\land}} & = \bm{(Rp)}^{\land}\bm{R} \\ 对于向量 \bm{v} \in \mathbb{R}^3\\ \bm{Rp^{\land}}\bm{v} & = \bm{(Rp)}^{\land}\bm{R}\bm{v} \\ 上式等号左边& 表示向量\bm{p,v}叉乘后所得向量根据 \bm{R}旋转。\\ 等号右边表示& 向量\bm{p,v}分别根据 \bm{R}旋转后叉乘,显然得到同一个向量。\\ 证毕。 \end{align*} 原式等效于证明Rp∧RTRRp∧IRp∧对于向量v∈R3Rp∧v上式等号左边等号右边表示证毕。=(Rp)∧R=(Rp)∧R=(Rp)∧R=(Rp)∧Rv表示向量p,v叉乘后所得向量根据R旋转。向量p,v分别根据R旋转后叉乘,显然得到同一个向量。
√ 题6
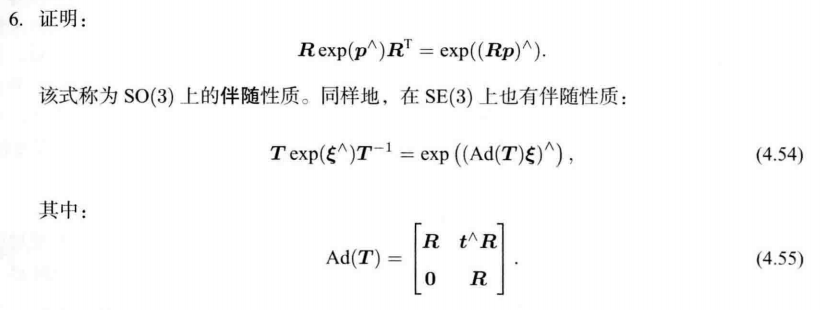
根据题 5 的结论 : ( R p ) ∧ = R p ∧ R T exp ( ( R p ) ∧ ) = exp ( R p ∧ R T ) 级数展开 = ∑ n = 0 ∞ ( R p ∧ R T ) n N ! = ∑ n = 0 ∞ R p ∧ R T ⋅ R p ∧ R T ⋅ , ⋅ ⋅ ⋅ , ⋅ R p ∧ R T ⋅ R p ∧ R T N ! 其中 R T R = I = ∑ n = 0 ∞ R ( p ∧ ) n R T N ! = R ∑ n = 0 ∞ ( p ∧ ) n N ! R T = R exp ( p ∧ ) R T \begin{align*}根据题5 的结论&:\bm{(Rp)}^{\land} = \bm{Rp^{\land}R^T} \\ \exp((\bm{Rp})^{\land})& = \exp(\bm{Rp^{\land}R^T}) \\ 级数展开\\ &= \sum\limits_{n=0}^{\infty}\frac{(\bm{Rp^{\land}R^T}) ^n}{N!} \\ &= \sum\limits_{n=0}^{\infty}\frac{\bm{Rp^{\land}R^T}·\bm{Rp^{\land}R^T}·,···,·\bm{Rp^{\land}R^T}·\bm{Rp^{\land}R^T}}{N!} \\ 其中 \bm{R^TR=I}\\ & = \sum\limits_{n=0}^{\infty}\frac{\bm{R(p^{\land})^nR^T}}{{N!} }\\ & = \bm{R} \sum\limits_{n=0}^{\infty}\frac{\bm{(p^{\land})^n}}{{N!} } \bm{R}^T \\ & = \bm{R}\exp(\bm{p}^{\land})\bm{R}^T \end{align*} 根据题5的结论exp((Rp)∧)级数展开其中RTR=I:(Rp)∧=Rp∧RT=exp(Rp∧RT)=n=0∑∞N!(Rp∧RT)n=n=0∑∞N!Rp∧RT⋅Rp∧RT⋅,⋅⋅⋅,⋅Rp∧RT⋅Rp∧RT=n=0∑∞N!R(p∧)nRT=Rn=0∑∞N!(p∧)nRT=Rexp(p∧)RT
证毕。
——————
6.2 SE(3)伴随性质
T exp ( ξ ∧ ) T − 1 = T ∑ n = 0 ∞ ( ξ ∧ ) n n ! T − 1 由于 T − 1 T = I = ∑ n = 0 ∞ T ξ ∧ T − 1 ⋅ T ξ ∧ T − 1 ⋅ T ξ ∧ T − 1 ⋅ T ξ ∧ T − 1 ⋅ , ⋅ ⋅ ⋅ , T ξ ∧ T − 1 ⋅ T ξ ∧ T − 1 n ! = ∑ n = 0 ∞ ( T ξ ∧ T − 1 ) n n ! = exp ( T ξ ∧ T − 1 ) \begin{align*} \bm{T}\exp(\bm{\xi}^{\land})\bm{T}^{-1} &= \bm{T}\sum\limits_{n=0}^{\infty}\frac{(\bm{\xi}^{\land})^n}{n!}\bm{T}^{-1} \\ 由于 \bm{T^{-1}T=I} \\ & = \sum\limits_{n=0}^{\infty}\frac{\bm{T}\bm{\xi}^{\land}\bm{T}^{-1}·\bm{T}\bm{\xi}^{\land}\bm{T}^{-1}·\bm{T}\bm{\xi}^{\land}\bm{T}^{-1}·\bm{T}\bm{\xi}^{\land}\bm{T}^{-1}·,···, \bm{T}\bm{\xi}^{\land}\bm{T}^{-1}·\bm{T}\bm{\xi}^{\land}\bm{T}^{-1}}{n!} \\ & = \sum\limits_{n=0}^{\infty}\frac{(\bm{T}\bm{\xi}^{\land}\bm{T}^{-1})^n}{n!} \\ &= \exp(\bm{T}\bm{\xi}^{\land}\bm{T}^{-1}) \\ \end{align*} Texp(ξ∧)T−1由于T−1T=I=Tn=0∑∞n!(ξ∧)nT−1=n=0∑∞n!Tξ∧T−1⋅Tξ∧T−1⋅Tξ∧T−1⋅Tξ∧T−1⋅,⋅⋅⋅,Tξ∧T−1⋅Tξ∧T−1=n=0∑∞n!(Tξ∧T−1)n=exp(Tξ∧T−1)
ξ = [ ρ ϕ ] , ξ ∧ = [ ϕ ∧ ρ 0 T 0 ] , T = [ R t 0 T 1 ] , T − 1 = [ R T − R T t 0 T 1 ] \bm{\xi=}\begin{bmatrix}\bm{\rho}\\ \bm{\phi} \end{bmatrix},\bm{\xi}^{\land}=\begin{bmatrix}\bm{\phi}^{\land} & \bm{\rho} \\ \bm{0}^T & 0 \end{bmatrix},\bm{T}=\begin{bmatrix}\bm{R} & \bm{t}\\ \bm{0}^T & 1 \end{bmatrix},\bm{T}^{-1}=\begin{bmatrix}\bm{R}^T & -\bm{R}^T\bm{t}\\ \bm{0}^T & 1 \end{bmatrix} ξ=[ρϕ],ξ∧=[ϕ∧0Tρ0],T=[R0Tt1],T−1=[RT0T−RTt1]

则:
T ξ ∧ T − 1 = [ R t 0 T 1 ] [ ϕ ∧ ρ 0 T 0 ] [ R T − R T t 0 T 1 ] = [ R ϕ ∧ R ρ 0 T 0 ] [ R T − R T t 0 T 1 ] = [ R ϕ ∧ R T − R ϕ ∧ R T t + R ρ 0 T 0 ] 由题 5 的结论 R p ∧ R T = ( R p ) ∧ = [ ( R ϕ ) ∧ − ( R ϕ ) ∧ t + R ρ 0 T 0 ] 对比 ξ , ξ ∧ 进行转换 = [ − ( R ϕ ) ∧ t + R ρ R ϕ ] ∧ 由叉乘性质, = [ t ∧ R ϕ + R ρ R ϕ ] ∧ = [ R t ∧ R 0 R ] [ ρ ϕ ] ) ∧ = ( A d ( T ) ξ ) ∧ \begin{align*}\bm{T}\bm{\xi}^{\land}\bm{T}^{-1}&= \begin{bmatrix}\bm{R} & \bm{t}\\ \bm{0}^T & 1 \end{bmatrix}\begin{bmatrix}\bm{\phi}^{\land} & \bm{\rho} \\ \bm{0}^T & 0 \end{bmatrix}\begin{bmatrix}\bm{R}^T & -\bm{R}^T\bm{t}\\ \bm{0}^T & 1 \end{bmatrix}\\ &= \begin{bmatrix}\bm{R}\bm{\phi}^{\land} & \bm{R\rho}\\ \bm{0}^T & 0 \end{bmatrix}\begin{bmatrix}\bm{R}^T & -\bm{R}^T\bm{t}\\ \bm{0}^T & 1 \end{bmatrix}\\ &= \begin{bmatrix}\bm{R}\bm{\phi}^{\land}\bm{R}^T & -\bm{R}\bm{\phi}^{\land}\bm{R}^T\bm{t + \bm{R\rho}}\\ \bm{0}^T & 0 \end{bmatrix} \\ 由题5的结论& \bm{Rp^{\land}R^T} = \bm{(Rp)}^{\land} \\ &= \begin{bmatrix}(\bm{R}\bm{\phi})^{\land} & -(\bm{R}\bm{\phi})^{\land}\bm{t + \bm{R\rho}}\\ \bm{0}^T &0 \end{bmatrix}\\ & 对比 \bm{\xi, {\xi}^{\land}}进行转换\\ &= \begin{bmatrix}-(\bm{R}\bm{\phi})^{\land}\bm{t + \bm{R\rho}}\\ \bm{R}\bm{\phi} \end{bmatrix}^{\land}\\ 由叉乘性质, \\ &= \begin{bmatrix}\bm{t}^{\land}\bm{R}\bm{\phi}+ \bm{R\rho}\\ \bm{R}\bm{\phi} \end{bmatrix}^{\land}\\ &= \begin{bmatrix}\bm{R}& \bm{t}^{\land}\bm{R} \\ \bm{0} & \bm{R} \end{bmatrix}\begin{bmatrix}\bm{\rho}\\ \bm{\phi} \end{bmatrix})^{\land}\\ & = (Ad(\bm{T})\bm{\xi})^{\land} \end{align*} Tξ∧T−1由题5的结论由叉乘性质,=[R0Tt1][ϕ∧0Tρ0][RT0T−RTt1]=[Rϕ∧0TRρ0][RT0T−RTt1]=[Rϕ∧RT0T−Rϕ∧RTt+Rρ0]Rp∧RT=(Rp)∧=[(Rϕ)∧0T−(Rϕ)∧t+Rρ0]对比ξ,ξ∧进行转换=[−(Rϕ)∧t+RρRϕ]∧=[t∧Rϕ+RρRϕ]∧=[R0t∧RR][ρϕ])∧=(Ad(T)ξ)∧
综上:
T exp ( ξ ∧ ) T − 1 = exp ( ( A d ( T ) ξ ) ∧ ) \bm{T}\exp(\bm{\xi}^{\land})\bm{T}^{-1}=\exp((Ad(\bm{T})\bm{\xi})^{\land}) Texp(ξ∧)T−1=exp((Ad(T)ξ)∧)
其中
A d ( T ) = [ R t ∧ R 0 R ] Ad(\bm{T})=\begin{bmatrix}\bm{R}& \bm{t}^{\land}\bm{R} \\ \bm{0} & \bm{R} \end{bmatrix} Ad(T)=[R0t∧RR]
证毕
————————————————
√ 题7


SO(3):
设右扰动 Δ R Δ\bm{R} ΔR 对应的李代数 为 φ \varphi φ
∂ ( R p ) ∂ φ = lim φ → 0 exp ( ϕ ∧ ) exp ( φ ∧ ) p − exp ( ϕ ∧ ) p φ = lim φ → 0 exp ( ϕ ∧ ) ( I + φ ∧ ) p − exp ( ϕ ∧ ) p φ = lim φ → 0 exp ( ϕ ∧ ) φ ∧ p φ = lim φ → 0 R φ ∧ p φ 由题 5 : R p ∧ = ( R p ) ∧ R = lim φ → 0 ( R φ ) ∧ R p φ 由叉乘性质 = lim φ → 0 − ( R p ) ∧ R φ φ = − ( R p ) ∧ R \begin{align*}\frac{\partial(\bm{Rp})}{\partial\varphi} &= \lim\limits_{\varphi\to0}\frac{\exp(\phi^{\land})\exp(\varphi^{\land})\bm{p}-\exp(\phi^{\land})\bm{p}}{\varphi}\\ &= \lim\limits_{\varphi\to0}\frac{\exp(\phi^{\land})(\bm{I} + \varphi^{\land})\bm{p}-\exp(\phi^{\land})\bm{p}}{\varphi}\\ &= \lim\limits_{\varphi\to0}\frac{\exp(\phi^{\land})\varphi^{\land}\bm{p}}{\varphi}\\ &= \lim\limits_{\varphi\to0}\frac{\bm{R}\varphi^{\land}\bm{p}}{\varphi}\\ 由题5 : \bm{Rp^{\land}} & = \bm{(Rp)}^{\land}\bm{R} \\ &= \lim\limits_{\varphi\to0}\frac{(\bm{R}\varphi)^{\land}\bm{Rp}}{\varphi}\\ 由叉乘性质\\ &= \lim\limits_{\varphi\to0}\frac{-(\bm{Rp})^{\land}\bm{R}\varphi}{\varphi}\\ & = -(\bm{Rp})^{\land}\bm{R} \end{align*} ∂φ∂(Rp)由题5:Rp∧由叉乘性质=φ→0limφexp(ϕ∧)exp(φ∧)p−exp(ϕ∧)p=φ→0limφexp(ϕ∧)(I+φ∧)p−exp(ϕ∧)p=φ→0limφexp(ϕ∧)φ∧p=φ→0limφRφ∧p=(Rp)∧R=φ→0limφ(Rφ)∧Rp=φ→0limφ−(Rp)∧Rφ=−(Rp)∧R
SE(3):
假设某空间点 p \bm{p} p 经过一次变换 T \bm{T} T (对应李代数为 ξ \bm{\xi} ξ), 得到 T p \bm{Tp} Tp
现在给 T \bm{T} T 右乘一个扰动 Δ T = exp ( Δ ξ ∧ ) Δ\bm{T} = \exp(Δ\bm{\xi}^{\land}) ΔT=exp(Δξ∧)
设扰动项的李代数为 Δ ξ = [ Δ ρ , Δ ϕ ] T Δ\bm{\xi}=[Δ\bm{\rho},Δ\bm{\phi}]^T Δξ=[Δρ,Δϕ]T,则
∂ ( T p ) ∂ Δ ξ = lim Δ ξ → 0 exp ( ξ ∧ ) exp ( Δ ξ ∧ ) p − exp ( ξ ∧ ) p Δ ξ = lim Δ ξ → 0 exp ( ξ ∧ ) ( I + Δ ξ ∧ ) p − exp ( ξ ∧ ) p Δ ξ = lim Δ ξ → 0 exp ( ξ ∧ ) Δ ξ ∧ p Δ ξ = lim Δ ξ → 0 [ R t 0 1 ] [ Δ ϕ ∧ Δ ρ 0 T 0 ] p Δ ξ 把 p 前的 矩阵当做旋转矩阵,结合向量旋转的性质, = lim Δ ξ → 0 [ R t 0 1 ] [ Δ ϕ ∧ p + Δ ρ 0 ] Δ ξ = lim Δ ξ → 0 [ R Δ ϕ ∧ p + R Δ ρ 0 T ] [ Δ ρ , Δ ϕ ] T 将 Δ ρ , Δ ϕ 提出来,方便求导 根据 R p ∧ = ( R p ) ∧ R = lim Δ ξ → 0 [ ( R Δ ϕ ) ∧ R p + R Δ ρ 0 T ] [ Δ ρ , Δ ϕ ] T = lim Δ ξ → 0 [ − ( R p ) ∧ R Δ ϕ + R Δ ρ 0 T ] [ Δ ρ , Δ ϕ ] T = [ R − ( R p ) ∧ R 0 T 0 T ] \begin{align*}\frac{\partial(\bm{Tp})}{\partial{Δ\bm{\xi}}} &= \lim\limits_{Δ\bm{\xi}\to0}\frac{\exp(\bm{\xi}^{\land})\exp(Δ\bm{\xi}^{\land})\bm{p}-\exp(\bm{\xi}^{\land})\bm{p}}{Δ\bm{\xi}} \\ &= \lim\limits_{Δ\bm{\xi}\to0}\frac{\exp(\bm{\xi}^{\land})(\bm{I} +Δ\bm{\xi}^{\land})\bm{p}-\exp(\bm{\xi}^{\land})\bm{p}}{Δ\bm{\xi}} \\ &= \lim\limits_{Δ\bm{\xi}\to0}\frac{\exp(\bm{\xi}^{\land})Δ\bm{\xi}^{\land}\bm{p}}{Δ\bm{\xi}} \\ &=\lim\limits_{Δ\bm{\xi}\to0} \frac{\begin{bmatrix} \bm{R} & \bm{t}\\ 0 & 1 \end{bmatrix}\begin{bmatrix} Δ\bm{\phi}^{\land} & \Delta\bm{\rho}\\ \bm{0}^T & 0 \end{bmatrix}\bm{p}}{Δ\bm{\xi}}\\ 把\bm{p}前的&矩阵当做旋转矩阵,结合向量旋转的性质,\\ &=\lim\limits_{Δ\bm{\xi}\to0} \frac{\begin{bmatrix} \bm{R} & \bm{t}\\ 0 & 1 \end{bmatrix}\begin{bmatrix} Δ\bm{\phi}^{\land}\bm{p} + \Delta\bm{\rho}\\ 0 \end{bmatrix}}{Δ\bm{\xi}}\\ &=\lim\limits_{Δ\bm{\xi}\to0} \frac{\begin{bmatrix} \bm{R}\Delta\bm{\phi}^{\land}\bm{p}+ \bm{R}\Delta\bm{\rho}\\ \bm{0}^T \end{bmatrix}}{[Δ\bm{\rho},Δ\bm{\phi}]^T} \\ 将&Δ\bm{\rho},Δ\bm{\phi} 提出来,方便求导\\ & 根据 \bm{Rp^{\land}} = \bm{(Rp)}^{\land}\bm{R} \\ &=\lim\limits_{Δ\bm{\xi}\to0} \frac{\begin{bmatrix} (\bm{R}\Delta\bm{\phi})^{\land}\bm{R}\bm{p}+\bm{R}\Delta\bm{\rho}\\ \bm{0}^T \end{bmatrix}}{[Δ\bm{\rho},Δ\bm{\phi}]^T} \\ &=\lim\limits_{Δ\bm{\xi}\to0} \frac{\begin{bmatrix} -(\bm{R}\bm{p})^{\land}\bm{R}\Delta\bm{\phi}+ \bm{R}\Delta\bm{\rho}\\ \bm{0}^T \end{bmatrix}}{[Δ\bm{\rho},Δ\bm{\phi}]^T} \\ & = \begin{bmatrix} \bm{R} & -(\bm{R}\bm{p})^{\land}\bm{R} \\ \bm{0}^T & \bm{0}^T \end{bmatrix} \\ \end{align*} ∂Δξ∂(Tp)把p前的将=Δξ→0limΔξexp(ξ∧)exp(Δξ∧)p−exp(ξ∧)p=Δξ→0limΔξexp(ξ∧)(I+Δξ∧)p−exp(ξ∧)p=Δξ→0limΔξexp(ξ∧)Δξ∧p=Δξ→0limΔξ[R0t1][Δϕ∧0TΔρ0]p矩阵当做旋转矩阵,结合向量旋转的性质,=Δξ→0limΔξ[R0t1][Δϕ∧p+Δρ0]=Δξ→0lim[Δρ,Δϕ]T[RΔϕ∧p+RΔρ0T]Δρ,Δϕ提出来,方便求导根据Rp∧=(Rp)∧R=Δξ→0lim[Δρ,Δϕ]T[(RΔϕ)∧Rp+RΔρ0T]=Δξ→0lim[Δρ,Δϕ]T[−(Rp)∧RΔϕ+RΔρ0T]=[R0T−(Rp)∧R0T]
——————————————
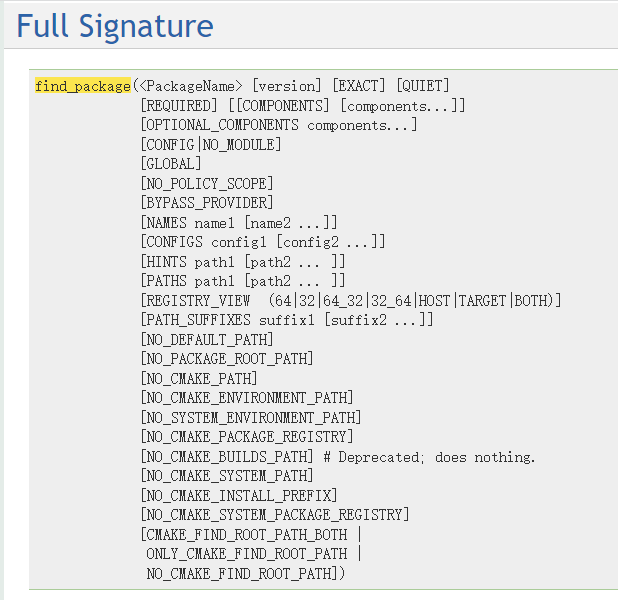
√ 题8
cmake的 find_package指令:
官方文档
find_package(包名 版本 REQUIRED)
一些包需要 sudo make install后才能被找到

LaTex
$\mathfrak{g}$
g \mathfrak{g} g
$\mathbb{R}$
R \mathbb{R} R
$\times$
× \times ×
$\varphi$
φ \varphi φ
$\Phi$
Φ \Phi Φ

$\overset{\mathrm{def}}{=}$
$\xlongequal{def}$
= d e f \overset{\mathrm{def}}{=} =def
= d e f \xlongequal{def} def
相关文章:
《视觉 SLAM 十四讲》V2 第 4 讲 李群与李代数 【什么样的相机位姿 最符合 当前观测数据】
P71 文章目录 4.1 李群与李代数基础4.1.3 李代数的定义4.1.4 李代数 so(3)4.1.5 李代数 se(3) 4.2 指数与对数映射4.2.1 SO(3)上的指数映射罗德里格斯公式推导 4.2.2 SE(3) 上的指数映射SO(3),SE(3),so(3),se(3)的对应关系 4.3 李代数求导与扰动模型4.3.2 SO(3)上的李代数求导…...
【深蓝学院】手写VIO第4章--基于滑动窗口算法的 VIO 系统:可观性和 一致性--笔记
0. 内容 T1. 参考SLAM14讲P247直接可写,注意 ξ 1 , ξ 2 \xi_1,\xi_2 ξ1,ξ2之间有约束(关系)。 套用舒尔补公式: marg掉 ξ 1 \xi_1 ξ1之后,信息被传递到 L 1 和 L 2 L_1和L_2 L1和L2之间了。 T2....

mfc 动态加载dll库,Mat转CImage,读ini配置文件,鼠标操作,在edit控件上画框,调试信息打印
动态加载dll库 h文件中添加 #include "mydll.h" #ifdef UNICODE //区分字符集 #define LoadLibrary LoadLibraryW #else #define LoadLibrary LoadLibraryA #endif // !UNICODEtypedef double(*mydllPtr)(int, int);类内添加: mydllPtr m_mydll; cpp…...
索尼 toio™应用创意开发征文|检测工业平台震动
虽然索尼toio Q宝机器人主要是为儿童教育娱乐开发的,但我认为它在工业等领域也有一定应用潜力。例如,工业领域经常会有某些平面在实际作业中持续震动,导致零件过疲劳、平台失去稳定等问题。而这样的平台往往位于机器内部,从外部很…...
【已解决】 Expected linebreaks to be ‘LF‘ but found ‘CRLF‘.
问题描述 团队都是用mac,只有我自己是windows,启动项目一直报错 Expected linebreaks to be ‘LF‘ but found ‘CRLF‘. 但我不能因为自己的问题去改团队配置,也尝试过该vscode配置默认是LF还是报错 思路 看文章vscode如何替换所有文件的…...

Java8 Lambda.stream.sorted() 方法使用浅析分享
文章目录 Java8 Lambda.stream.sorted() 方法使用浅析分享sorted() 重载方法一升序降序 sorted() 重载方法二升序降序多字段排序 mock代码 Java8 Lambda.stream.sorted() 方法使用浅析分享 本文主要分享运用 Java8 中的 Lambda.stream.sorted方法排序的使用! sorted…...

Neural Networks for Fingerprint Recognition
Neural Computation ( IF 3.278 ) 摘要: 在采集指纹图像数据库后,设计了一种用于指纹识别的神经网络算法。当给出一对指纹图像时,算法输出两个图像来自同一手指的概率估计值。在一个实验中,神经网络使用几百对图像进行训练&…...

ChatGPT推出全新功能,引发人工智能合成声音担忧|百能云芯
人工智能AI科技企业OpenAI公司25日宣布,其聊天应用程序ChatGPT如今具备「看、听、说」能力,至少能够理解口语、用合成语音回应并且处理图像;但专家忧心,以假乱真与深度伪造的乱象可能变本加厉。 国家广播公司新闻网(NBC News)报导…...
Java 实现遍历一个文件夹,文件夹有100万数据,获取到修改时间在2天之内的数据
目录 1 需求2 实现1(第一种方法)2 实现2 (推荐使用这个,快)3 实现3(推荐) 1 需求 现在有一个文件夹,里面会一直存数据,动态的存数据,之后可能会达到100万&am…...

持续集成部署-k8s-命令行工具:基础命令的使用
持续集成部署-k8s-命令行工具:基础命令的使用 1. 资源类型与别名2. 资源操作2.1 创建对象2.2 显示和查找资源2.3 更新资源2.4 修补资源2.5 编辑资源2.6 scale 资源2.7 删除资源3. 格式化输出1. 资源类型与别名 资源类型缩写别名clusterscomponentstatusescsconfigmapscmdaemon…...
使用python脚本的时间盲注完整步骤
文章目录 一、获取数据库名称长度二、获取数据库名称三、获取表名总长度四、获取表名五、获取指定表列名总长度六、获取指定表列名七、获取指定表指定列的表内数据总长度八、获取指定表指定列的表内数据 一、获取数据库名称长度 测试环境是bwapp靶场 SQL Injection - Blind - …...
C++项目:仿mudou库one thread one loop式并发服务器实现
目录 1.实现目标 2.HTTP服务器 3.Reactor模型 3.1分类 4.功能模块划分: 4.1SERVER模块: 4.2HTTP协议模块: 5.简单的秒级定时任务实现 5.1Linux提供给我们的定时器 5.2时间轮思想: 6.正则库的简单使用 7.通用类型any类型的实现 8.日志宏的实现 9.缓冲区…...
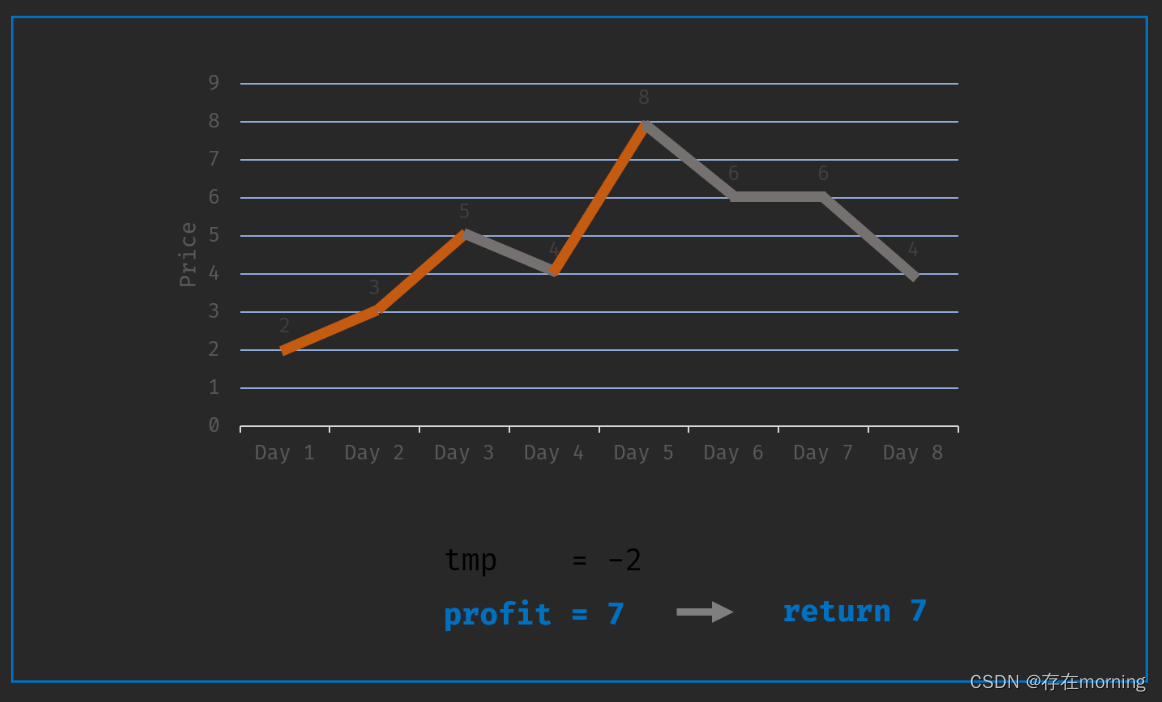
【算法训练-贪心算法 一】买卖股票的最佳时机II
废话不多说,喊一句号子鼓励自己:程序员永不失业,程序员走向架构!本篇Blog的主题是【贪心算法】,使用【数组】这个基本的数据结构来实现,这个高频题的站点是:CodeTop,筛选条件为&…...

单阶段目标检测与双阶段目标检测的联系与区别
🚀 作者 :“码上有钱” 🚀 文章简介 :AI-目标检测算法 🚀 欢迎小伙伴们 点赞👍、收藏⭐、留言💬简介 双阶段目标检测算法与单阶段目标检测算法在工作原理和性能方面存在一些相似与差异之处。下…...

Mysql技术文档--设计表规范式-一次性扫盲
阿丹: 在设计表的时候经常出现一些问题,其实自己很清楚就是因为在设计表的时候没有规范。导致后期加表的时候出现了问题。所以趁着这个假期卷一卷。同时只有在开始的时候 几大范式 在关系型数据库中,数据表设计的基本原则、规则就称为范式。…...

python socket 传输opencv读取的图像
python socket网络编程 将ros机器人摄像头捕捉的画面在上位机实时显示,需要用到socket网络编程,提供了TCP和UDP两种方式 TCP服务器端代码: 创建TCP套接字: s socket(AF_INET, SOCK_STREAM) 创建了一个TCP套接字。SOCK_STREAM 表示这是一个TCP套接字&…...
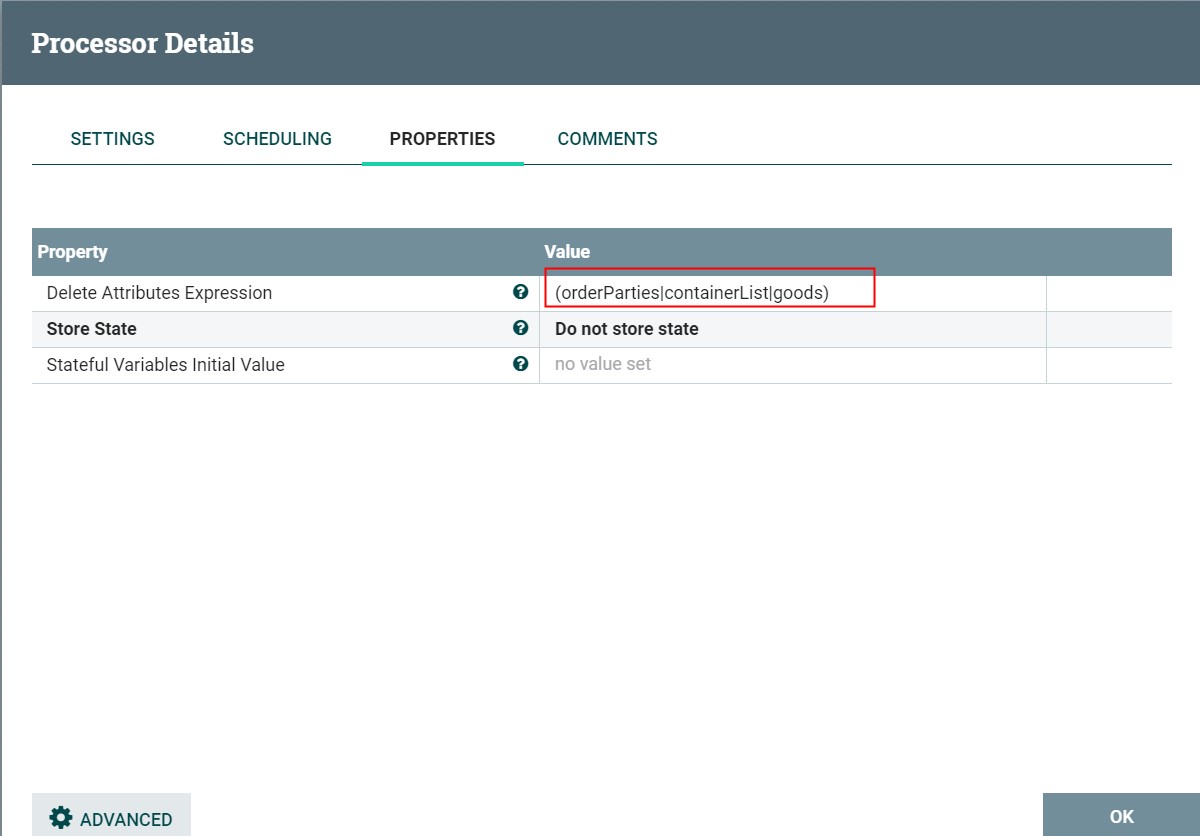
APACHE NIFI学习之—UpdateAttribute
UpdateAttribute 描述: 通过设置属性表达式来更新属性,也可以基于属性正则匹配来删除属性 标签: attributes, modification, update, delete, Attribute Expression Language, state, 属性, 修改, 更新, 删除, 表达式 参数: 如下列表中,必填参数则…...
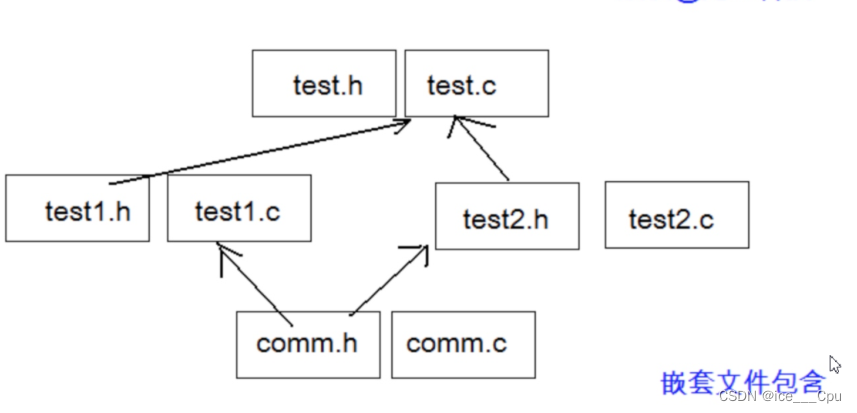
BIT-7文件操作和程序环境(16000字详解)
一:文件 1.1 文件指针 每个被使用的文件都在内存中开辟了一个相应的文件信息区,用来存放文件的相关信息(如文件的名字,文件状态及文件当前的位置等)。这些信息是保存在一个结构体变量中的。该结构体类型是有系统声明…...

冥想第九百二十八天
1.今天周三,今天晚上日语课上了好久,天气也不好, 2.项目上全力以赴的一天。 3.感谢父母,感谢朋友感谢家人,感谢不断进步的自己。...

深入浅出,SpringBoot整合Quartz实现定时任务与Redis健康检测(一)
目录 前言 环境配置 Quartz 什么是Quartz? 应用场景 核心组件 Job JobDetail Trigger CronTrigger SimpleTrigger Scheduler 任务存储 RAM JDBC 导入依赖 定时任务 销量统计 Redis检测 使用 编辑 注意事项 前言 在悦享校园1.0中引入了Quart…...

利用ngx_stream_return_module构建简易 TCP/UDP 响应网关
一、模块概述 ngx_stream_return_module 提供了一个极简的指令: return <value>;在收到客户端连接后,立即将 <value> 写回并关闭连接。<value> 支持内嵌文本和内置变量(如 $time_iso8601、$remote_addr 等)&a…...
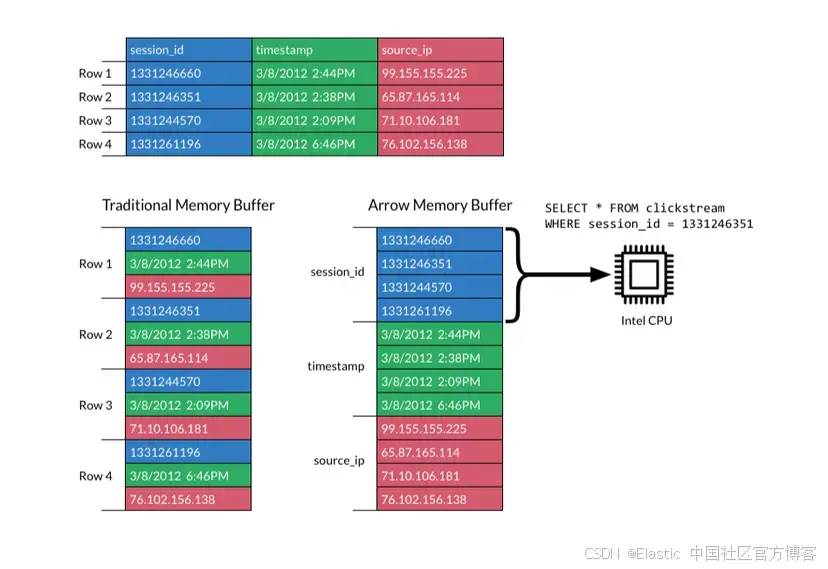
JavaScript 中的 ES|QL:利用 Apache Arrow 工具
作者:来自 Elastic Jeffrey Rengifo 学习如何将 ES|QL 与 JavaScript 的 Apache Arrow 客户端工具一起使用。 想获得 Elastic 认证吗?了解下一期 Elasticsearch Engineer 培训的时间吧! Elasticsearch 拥有众多新功能,助你为自己…...

DeepSeek 技术赋能无人农场协同作业:用 AI 重构农田管理 “神经网”
目录 一、引言二、DeepSeek 技术大揭秘2.1 核心架构解析2.2 关键技术剖析 三、智能农业无人农场协同作业现状3.1 发展现状概述3.2 协同作业模式介绍 四、DeepSeek 的 “农场奇妙游”4.1 数据处理与分析4.2 作物生长监测与预测4.3 病虫害防治4.4 农机协同作业调度 五、实际案例大…...

Python ROS2【机器人中间件框架】 简介
销量过万TEEIS德国护膝夏天用薄款 优惠券冠生园 百花蜂蜜428g 挤压瓶纯蜂蜜巨奇严选 鞋子除臭剂360ml 多芬身体磨砂膏280g健70%-75%酒精消毒棉片湿巾1418cm 80片/袋3袋大包清洁食品用消毒 优惠券AIMORNY52朵红玫瑰永生香皂花同城配送非鲜花七夕情人节生日礼物送女友 热卖妙洁棉…...
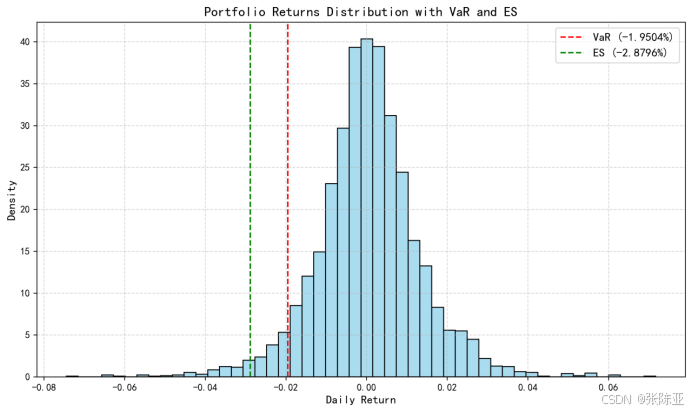
Python基于历史模拟方法实现投资组合风险管理的VaR与ES模型项目实战
说明:这是一个机器学习实战项目(附带数据代码文档),如需数据代码文档可以直接到文章最后关注获取。 1.项目背景 在金融市场日益复杂和波动加剧的背景下,风险管理成为金融机构和个人投资者关注的核心议题之一。VaR&…...

无人机侦测与反制技术的进展与应用
国家电网无人机侦测与反制技术的进展与应用 引言 随着无人机(无人驾驶飞行器,UAV)技术的快速发展,其在商业、娱乐和军事领域的广泛应用带来了新的安全挑战。特别是对于关键基础设施如电力系统,无人机的“黑飞”&…...

vulnyx Blogger writeup
信息收集 arp-scan nmap 获取userFlag 上web看看 一个默认的页面,gobuster扫一下目录 可以看到扫出的目录中得到了一个有价值的目录/wordpress,说明目标所使用的cms是wordpress,访问http://192.168.43.213/wordpress/然后查看源码能看到 这…...

基于Springboot+Vue的办公管理系统
角色: 管理员、员工 技术: 后端: SpringBoot, Vue2, MySQL, Mybatis-Plus 前端: Vue2, Element-UI, Axios, Echarts, Vue-Router 核心功能: 该办公管理系统是一个综合性的企业内部管理平台,旨在提升企业运营效率和员工管理水…...

Java数组Arrays操作全攻略
Arrays类的概述 Java中的Arrays类位于java.util包中,提供了一系列静态方法用于操作数组(如排序、搜索、填充、比较等)。这些方法适用于基本类型数组和对象数组。 常用成员方法及代码示例 排序(sort) 对数组进行升序…...

CTF show 数学不及格
拿到题目先查一下壳,看一下信息 发现是一个ELF文件,64位的 用IDA Pro 64 打开这个文件 然后点击F5进行伪代码转换 可以看到有五个if判断,第一个argc ! 5这个判断并没有起太大作用,主要是下面四个if判断 根据题目…...