第九节 使用设备树实现RGB 灯驱动
通过上一小节的学习,我们已经能够编写简单的设备树节点,并且使用常用的of 函数从设备树中获取我们想要的节点资源。这一小节我们带领大家使用设备树编写一个简单的RGB 灯驱动程序,加深对设备树的理解。
实验说明
本节实验使用到STM32MP1 开发板上的RGB 彩灯
硬件原理图分析
参考”字符设备驱动–点亮LED 灯”章节
实验代码讲解
本章的示例代码目录为:linux_driver/device_tree_rgb_led
编程思路
程序编写的主要内容为添加RGB 灯的设备树节点、在驱动程序中使用of 函数获取设备节点中的属性,编写测试应用程序。
- 首先向设备树添加RGB 设备节点
- 其次编写平台设备驱动框架,主要包驱动入口函数、驱动注销函数、平台设备结构体定义三部分内容。
- 实现.probe 函数,对rgb 进行设备注册和初始化。
- 实现字符设备操作函数集,这里主要实现.write 操作。
- 编写测试应用程序,对于输入不同的值控制rgb 颜色。
代码分析
添加RGB 设备节点
RGB 灯实际使用的是一个IO 口,控制它所需要的资源几个控制寄存器,所以它的设备树节点也非常简单如下所示。
列表1: 添加RGB 设备节点
/* 添加led 节点*/
rgb_led{#address-cells = <1>;#size-cells = <1>;compatible = "fire,rgb_led";/* 红灯节点*/ranges;rgb_led_red@0x50002000{compatible = "fire,rgb_led_red";reg = < 0x50002000 0x000000040x50002004 0x000000040x50002008 0x000000040x5000200C 0x000000040x50002018 0x000000040x50000A28 0x00000004>;status = "okay";};/* 绿灯节点*/rgb_led_green@0x50000A28{compatible = "fire,rgb_led_green";reg = < 0x50008000 0x000000040x50008004 0x000000040x50008008 0x000000040x5000800C 0x000000040x50008018 0x000000040x50000A28 0x00000004>;status = "okay";};/* 蓝灯节点*/rgb_led_blue@0x50000A28{compatible = "fire,rgb_led_blue";reg = < 0x50003000 0x000000040x50003004 0x000000040x50003008 0x000000040x5000300C 0x000000040x50003018 0x000000040x50000A28 0x00000004>;status = "okay";
};
RGB 灯的设备节点添加到了根节点的末尾, 完整内容请参考本章配套代码
linux_driver/device_tree_rgb_led/stm32mp157a-basic.dts。
上面添加的设备树中,代码里包含了控制RGB 灯的三个引脚所使用的的寄存器,这些寄存器的作用以及用法已经在裸机部分详细介绍,这里不再赘述,如有疑问可以参考字符设备驱动——点亮LED 灯章节。
-
第2-42 行:这里就是RGB 灯的设备树节点,节点名“rgb_led”由于在根节点下,很明显它的设备树路径为“/rgb_led”, 在驱动程序中我们会用到这cells”定义了它的子节点的reg 属性样式。“compatible”属性用于匹配驱动,在驱动我们会配置一个和“compatible”一样的参数,这样加载驱动是就可以自动和这个设备树节点匹配了。
-
第9-41 行: rgb_led 节点的子节点。RGB 灯使用了三个引脚,如上所示,它会用到16 个寄存器,为方便管理,我们为每个引脚创建了一个子节点,从上到下依次为红灯控制引脚、绿灯控制引脚、蓝灯控制引脚。它们三个非常相似,我们这里只以第一个红灯控制引脚为例讲解。在红灯子节点中只定义了三个属性,“compatie = “fire,rgb_led_red””表示这是一个红灯子节点,对于本实验来说可有可无。“reg = < ⋯>”定义红灯引脚使用到寄存器。一共有五个,排列顺序与注释中的一致。“status = “okay””定义子节点的状态,我们要用这个子节点所以设置为“okay”。
编写驱动程序
基于设备树的驱动程序与平台总线驱动非常相似,差别是平台总线驱动中的平台驱动要和平台设备进行匹配,使用设备树后设备树取代“平台设备”的作用,平台驱动只需要和与之对应的设备树节点匹配即可。
驱动程序主要内容包括编写平台设备驱动框架、编写.prob 函数、实现字符设备操作函数集、驱动注销四部分内容。源linux_driver/device_tree_rgb_led/rgb_led.c。
驱动入口函数
驱动入口函数仅仅注册一个平台驱动,如下所示
列表2: 驱动初始化函数
/*
* 驱动初始化函数
*/
static int __init led_platform_driver_init(void)
{int DriverState;DriverState = platform_driver_register(&led_platform_driver);printk(KERN_EMERG "\tDriverState is %d\n", DriverState);return 0;
}
在整个入口函数中仅仅调用了“platform_driver_register”函数注册了一个平台驱动。参数是传入一个平台设备结构体。
定义平台设备结构体
注册平台驱动时会用到平台设备结构体,在平台设备结构体主要作用是指定平台驱动的.probe 函数、指定与平台驱动匹配的平台设备,使用了设备树后就是指定与平台驱动匹配的设备树节点。
列表3: 平台设备结构体
static const struct of_device_id rgb_led[] = {{.compatible = "fire,rgb_led"},{/* sentinel */}
};/* 定义平台设备结构体*/
struct platform_driver led_platform_driver = {.probe = led_probe,.driver = {.name = "rgb-leds-platform",.owner = THIS_MODULE,.of_match_table = rgb_led,}};
- 第1-4 行:定义匹配表
- 第7-8 行:就是我们定义的平台设备结构体。其中“.probe =led_probe,”指定.probe 函数。.probe 函数比较特殊,当平台驱动和设备树节点匹配后会自动执行.probe 函数,后面的RGB灯的初始化以及字符设备的注册都在这个函数中实现(当然也可以在其他函数中实现)。
- 第9-14 行:“.driver = { ⋯}”定义driver 的一些属性,包括名字、所有者等等,其中最需要注意的是“.of_match_table ”属性,它指定这个驱动的匹配表。这里只定义了一个匹配值“.compatible = “fire,rgb_led”,这个驱动将会和设备树中“compatible =“fire,rgb_led”的节点匹配”,准确的说是和““compatible = “fire,rgb_led””的相对根节点的子节点匹配。我们在根节点下定义了rgb_led 子节点,并且设置“compatible = “fire,rgb_led”; 所以正常情况下,驱动会和这个子节点匹配。
实现.probe 函数
之前说过,当驱动和设备树节点匹配成功后会自动执行.probe 函数,所以我们在.probe 函数中实现一些初始化工作。本实验将RGB 初始化以及字符设备的初始化全部放到.probe 函数中实现,.probe 函数较长,但包含大量的简单、重复性的初始化代码,非常容易理解。
列表4: .probe 函数
/* 定义led 资源结构体,保存获取得到的节点信息以及转换后的虚拟寄存器地址*/
struct led_resource
{struct device_node *device_node; //rgb_led_red 的设备树节点void __iomem *va_MODER;void __iomem *va_OTYPER;void __iomem *va_OSPEEDR;void __iomem *va_PUPDR;void __iomem *va_BSRR;
};static void __iomem *va_clkaddr;static int led_probe(struct platform_device *pdv)
{int ret = -1; //保存错误状态码unsigned int register_data = 0;printk(KERN_EMERG "\t match successed \n");/* 获取rgb_led 的设备树节点*/rgb_led_device_node = of_find_node_by_path("/rgb_led");if (rgb_led_device_node == NULL){printk(KERN_ERR "\t get rgb_led failed! \n");return -1;}/* 获取rgb_led 节点的红灯子节点*/led_red.device_node = of_find_node_by_name(rgb_led_device_node,"rgb_led_red");if (led_red.device_node == NULL){printk(KERN_ERR "\n get rgb_led_red_device_node failed ! \n");
return -1;}/* 获取reg 属性并转化为虚拟地址*/led_red.va_MODER = of_iomap(led_red.device_node, 0);led_red.va_OTYPER = of_iomap(led_red.device_node, 1);led_red.va_OSPEEDR = of_iomap(led_red.device_node, 2);led_red.va_PUPDR = of_iomap(led_red.device_node, 3);led_red.va_BSRR = of_iomap(led_red.device_node, 4);va_clkaddr = of_iomap(led_red.device_node, 5);register_data = readl(va_clkaddr);// 开启a、b、g 的时钟register_data |= (0x43); // 开启a、b、g 的时钟writel(register_data, va_clkaddr);// 设置模式寄存器:输出模式register_data = readl(led_red.va_MODER);register_data &= ~((unsigned int)0X3 << (2 * 13));register_data |= ((unsigned int)0X1 << (2 * 13));writel(register_data,led_red.va_MODER);// 设置输出类型寄存器:推挽模式register_data = readl(led_red.va_OTYPER);register_data &= ~((unsigned int)0X1 << 13);writel(register_data, led_red.va_OTYPER);// 设置输出速度寄存器:高速register_data = readl(led_red.va_OSPEEDR);register_data &= ~((unsigned int)0X3 << (2 * 13));register_data |= ((unsigned int)0x2 << (2 * 13));writel(register_data, led_red.va_OSPEEDR);// 设置上下拉寄存器:上拉register_data = readl(led_red.va_PUPDR);register_data &= ~((unsigned int)0X3 << (2*13));register_data |= ((unsigned int)0x1 << (2*13));writel(register_data,led_red.va_PUPDR);// 设置置位寄存器:默认输出高电平register_data = readl(led_red.va_BSRR);register_data |= ((unsigned int)0x1 << (13));writel(register_data, led_red.va_BSRR);/* 获取rgb_led 节点的绿灯子节点*/led_green.device_node = of_find_node_by_name(rgb_led_device_node,"rgb_led_green");if (led_green.device_node == NULL){printk(KERN_ERR "\n get rgb_led_green_device_node failed ! \n");return -1;}/* 获取reg 属性并转化为虚拟地址*/led_green.va_MODER = of_iomap(led_green.device_node, 0);led_green.va_OTYPER = of_iomap(led_green.device_node, 1);led_green.va_OSPEEDR = of_iomap(led_green.device_node, 2);led_green.va_PUPDR = of_iomap(led_green.device_node, 3);led_green.va_BSRR = of_iomap(led_green.device_node, 4);// 设置模式寄存器:输出模式register_data = readl(led_green.va_MODER);register_data &= ~((unsigned int)0X3 << (2 * 2));register_data |= ((unsigned int)0X1 << (2 * 2));writel(register_data,led_green.va_MODER);// 设置输出类型寄存器:推挽模式register_data = readl(led_green.va_OTYPER);register_data &= ~((unsigned int)0X1 << 2);writel(register_data, led_green.va_OTYPER);// 设置输出速度寄存器:高速register_data = readl(led_green.va_OSPEEDR);register_data &= ~((unsigned int)0X3 << (2 * 2));register_data |= ((unsigned int)0x2 << (2 * 2));writel(register_data, led_green.va_OSPEEDR);// 设置上下拉寄存器:上拉register_data = readl(led_green.va_PUPDR);register_data &= ~((unsigned int)0X3 << (2*2));register_data |= ((unsigned int)0x1 << (2*2));writel(register_data,led_green.va_PUPDR);// 设置置位寄存器:默认输出高电平register_data = readl(led_green.va_BSRR);register_data |= ((unsigned int)0x1 << (2));writel(register_data, led_green.va_BSRR);/* 获取rgb_led 节点的蓝灯子节点*/led_blue.device_node = of_find_node_by_name(rgb_led_device_node,"rgb_led_blue");if (led_blue.device_node == NULL){printk(KERN_ERR "\n get rgb_led_blue_device_node failed ! \n");return -1;}/* 获取reg 属性并转化为虚拟地址*/led_blue.va_MODER = of_iomap(led_blue.device_node, 0);led_blue.va_OTYPER = of_iomap(led_blue.device_node, 1);led_blue.va_OSPEEDR = of_iomap(led_blue.device_node, 2);led_blue.va_PUPDR = of_iomap(led_blue.device_node, 3);led_blue.va_BSRR = of_iomap(led_blue.device_node, 4);// 设置模式寄存器:输出模式register_data = readl(led_blue.va_MODER);register_data &= ~((unsigned int)0X3 << (2 * 5));register_data |= ((unsigned int)0X1 << (2 * 5));writel(register_data,led_blue.va_MODER);// 设置输出类型寄存器:推挽模式register_data = readl(led_blue.va_OTYPER);register_data &= ~((unsigned int)0X1 << 5);writel(register_data, led_blue.va_OTYPER);// 设置输出速度寄存器:高速register_data = readl(led_blue.va_OSPEEDR);register_data &= ~((unsigned int)0X3 << (2 * 5));register_data |= ((unsigned int)0x2 << (2 * 5));writel(register_data, led_blue.va_OSPEEDR);// 设置上下拉寄存器:上拉register_data = readl(led_blue.va_PUPDR);register_data &= ~((unsigned int)0X3 << (2*5));register_data |= ((unsigned int)0x1 << (2*5));writel(register_data,led_blue.va_PUPDR);// 设置置位寄存器:默认输出高电平register_data = readl(led_blue.va_BSRR);register_data |= ((unsigned int)0x1 << (5));writel(register_data, led_blue.va_BSRR);/*---------------------注册字符设备部分-----------------*///第一步//采用动态分配的方式,获取设备编号,次设备号为0,//设备名称为rgb-leds,可通过命令cat /proc/devices 查看//DEV_CNT 为1,当前只申请一个设备编号ret = alloc_chrdev_region(&led_devno, 0, DEV_CNT, DEV_NAME);if (ret < 0){printk("fail to alloc led_devno\n");goto alloc_err;}//第二步//关联字符设备结构体cdev 与文件操作结构体file_operationsled_chr_dev.owner = THIS_MODULE;cdev_init(&led_chr_dev, &led_chr_dev_fops);//第三步//添加设备至cdev_map 散列表中ret = cdev_add(&led_chr_dev, led_devno, DEV_CNT);if (ret < 0){printk("fail to add cdev\n");goto add_err;}//第四步/* 创建类*/class_led = class_create(THIS_MODULE, DEV_NAME);/* 创建设备*/device = device_create(class_led, NULL, led_devno, NULL, DEV_NAME);return 0;add_err://添加设备失败时,需要注销设备号unregister_chrdev_region(led_devno, DEV_CNT);printk("\n error! \n");alloc_err:return -1;
}
- 第2-12 行:自定义led 资源结构体,用于保存获取得到的设备节点信息以及转换后的虚拟寄存器地址。
- 第23-27 行:使用of_find_node_by_path 函数获取设备树节点“/rgb_led”,获取成功后会返回“/rgb_led”节点的“设备节点结构体”后面的代码我们就可以根据这个“设备节点结构体”访问它的子节点。
- 第31-152 行:依次初始化红、绿、蓝灯,这三部分非常相似,这里仅介绍第三部分红灯初始化部分。初始化过程如下:
- 第31-36 行: 获取红灯子节点, 这里使用函数“of_find_node_by_name” , 参数rgb_led_device_node 指定从rgb_led 节点开始搜索,参数“rgb_led_red”指定要获取那个节点,这里是rgb_led 节点下的rgb_led_red 子节点。
- 第40-45 行:获取并转换reg 属性,我们知道reg 属性保存的就是寄存器地址(物理地址),这里使用“of_iomap”函数,获取并完成物理地址到虚拟地址的转换。
- 第47-74 行:初始化寄存器,至于如何将初始化GPIO 在字符设备-点亮LED 章节已经详细介绍这里不再赘述,需要注意的是这里只能用系统提供的API(例如这里读写的是32 位数据,使用writel 和readl),不能像裸机那样直接使用“=”、“&=”、“|=”等等那样直接修改寄存器。
- 第160-184 行:注册一个字符设备。字符设备的注册过程与之前讲解的字符设备驱动非常相似,这部分代码就是从字符设备驱动拷贝得到的。这里仅仅做简单介绍。
列表5: 注册字符设备使用到的结构体
static dev_t led_devno; //定义字符设备的
设备号
static struct cdev led_chr_dev; //定义字符设备结构体chr_dev
struct class *class_led; //保存创建的类
struct device *device; // 保存创建的设备static struct file_operations led_chr_dev_fops ={.owner = THIS_MODULE,.open = led_chr_dev_open,.write = led_chr_dev_write,
};
- 第164-169 行:使用“alloc_chrdev_region”动态申请主设备号,并保存到led_devno 结构体中。
- 第172-173 行:使用“cdev_init”初始化字符设别。
- 第176-181 行:使用“cdev_add”将字符设备添加到系统。如果需要驱动自动创建设备节点,则还要创建类和设备。
- 第184 行:使用“class_create”函数创建类。
- 第187 行:使用“device_create”创建设备,其中参数“DEV_NAME”用于指定设备节点名,这个名字在应用程序中会用到。
如果驱动和设备树节点完成匹配,系统会自动执行.probe 函数,从上方代码可知,.probe 函数完成了RGB 灯的初始化和字符设备的创建。下一步我们只需要在字符设备的操作函数集中控制RGB灯即可。
实现字符设备操作函数集
为简化程序设计这里仅仅实现了字符设备操作函数集中的.write 函数,.write 函数根据收到的信息控制RGB 灯的亮、灭,结合代码介绍如下:
列表6: .write 函数实现
/* 字符设备操作函数集,open 函数*/
static int led_chr_dev_open(struct inode *inode, struct file *filp)
{printk("\n open form driver \n");return 0;
}/* 字符设备操作函数集,write 函数*/
static ssize_t led_chr_dev_write(struct file *filp, const char __user *buf,size_t cnt, loff_t *offt)
{unsigned int register_data = 0; //暂存读取得到的寄存器数据unsigned char write_data; //用于保存接收到的数据int error = copy_from_user(&write_data, buf, cnt);if (error < 0){return -1;}// 开启a、b、g 的时钟writel(0x43, va_clkaddr);/* 设置GPIOA13 输出电平*/if (write_data & 0x04){register_data |= (0x01 << (13+16));writel(register_data, led_red.va_BSRR); // GPIOA13 引脚输出低电平,红灯
亮}else{register_data |= (0x01 << (13));writel(register_data, led_red.va_BSRR); // GPIOA13 引脚输出高电平,红灯灭}/* 设置GPIOG2 输出电平*/if (write_data & 0x02){register_data |= (0x01 << (2+16));writel(register_data, led_green.va_BSRR); // GPIOG2 引脚输出低电平,绿灯亮}else{register_data |= (0x01 << (2));writel(register_data, led_green.va_BSRR); // GPIOG2 引脚输出高电平,绿灯灭}/* 设置GPIOB5 输出电平*/if (write_data & 0x01){register_data |= (0x01 << (5+16));writel(register_data, led_blue.va_BSRR); //GPIOB5 引脚输出低电平,灯亮}else{register_data |= (0x01 << (5));writel(register_data, led_blue.va_BSRR); //GPIOB5 引脚输出高电平,蓝灯灭}return 0;
}/* 字符设备操作函数集*/
static struct file_operations led_chr_dev_fops =
{.owner = THIS_MODULE,.open = led_chr_dev_open,.write = led_chr_dev_write,
};
我们仅实现了两个字符设备操作函数,open 对应led_chr_dev_open 函数这是一个空函数。.write对应led_chr_dev_write 函数,这个函数接收应用程序传回的命令,根据命令控制RGB 三个灯的亮、灭。
- 第14-19 行:使用copy_from_user 函数将用户空间的数据拷贝到内核空间。这里传递的数据是一个无符号整型数据。
- 第21-61 行:解析命令,如何解析由我们自己决定。本例中使用数字的后三位从高到低依次对应红灯、绿灯、蓝灯,对应位是1 则亮灯否则熄灭。例如0x03 表示红灯灭,绿灯和蓝灯亮。0x07 表示全亮。具体实现过程很简单这里不再赘述。
编写测试应用程序
在驱动程序中我采用自动创建设备节点的方式创建了字符设备的设备节点文件,文件名可自定义,写测试应用程序时记得文件名即可。本例程设备节点名为“rgb_led”。测试程序很简单,源码如下所示。
列表7: 测试应用程序
#include <stdio.h>
#include <unistd.h>
#include <fcntl.h>
#include <string.h>int main(int argc, char *argv[])
{printf("led_tiny test\n");/* 判断输入的命令是否合法*/if(argc != 2){printf(" command error ! \n");printf(" usage : sudo test_app num [num can be 0~7]\n");return -1;}/* 打开文件*/int fd = open("/dev/rgb_led", O_RDWR);if(fd < 0){printf("open file : %s failed !\n", argv[0]);return -1;}unsigned char command = atoi(argv[1]); //将受到的命令值转化为数字;/* 写入命令*/int error = write(fd,&command,sizeof(command));if(error < 0){printf("write file error! \n");close(fd);/* 判断是否关闭成功*/}/* 关闭文件*/error = close(fd);if(error < 0){printf("close file error! \n");}return 0;
}
- 第10-15 行:简单判断输入是否合法,运行本测试应用程序时argc 应该为2。它由应用程序
文件名和命令组成例如“./test_app < 命令值>”。 - 第19-24 行:打开设备文件。
- 第26-36 行:将终端输入的命令值转化为数字最终使用write 函数
- 第39-43 行:关闭设备文件。
编译驱动程序
编译设备树
将rgb_led 节点添加到设备树中,并在内核源码目录执行如下命令。
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- stm32mp157_ebf_defconfigmake ARCH=arm -j4 CROSS_COMPILE=arm-linux-gnueabihf- dtbs
最终会在内核源码/arch/arm/boot/dts 下生成stm32mp157a-basic.dtb 这个设备树文件。
编译驱动和应用程序
执行make 命令,Makefile 和前面大致相同。最终会生成rgb_led.ko 和test_app 应用程序
程序运行结果
在板卡上的部分GPIO 可能会被系统占用,在使用前请根据需要改/boot/uEnv.txt 文件,可注释掉某些设备树插件的加载,重启系统,释放相应的GPIO 引脚。
如本节实验中,可能在鲁班猫系统中默认使能了LED 的设备功能,用在了LED 子系统。引脚被占用后,设备树可能无法再加载或驱动中无法再申请对应的资源。
方法参考如下:

取消LED 设备树插件,以释放系统对应LED 资源,操作如下:

如若运行代码时出现“Device or resource busy”或者运行代码卡死等等现象,请按上述情况检查并按上述步骤操作。
如出现Permission denied 或类似字样,请注意用户权限,大部分操作硬件外设的功能,几乎都需要root 用户权限,简单的解决方案是在执行语句前加入sudo 或以root 用户运行程序。
实验操作
将设备树、驱动程序和应用程序通过NFS 或SCP 等方式拷贝到开发板中。
替换原来的设备树/boot/dtbs/stm32mp157a-basic.dtb,并重启开发板。
执行如下命令加载驱动:
命令:
sudo insmod ./rgb-led.ko
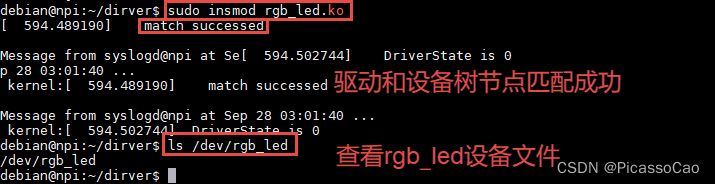
驱动加载成功后直接运行应用程序如下所示。
命令:./test_app < 命令>
执行结果如下:
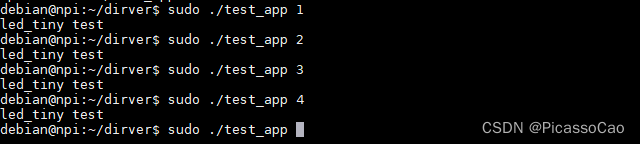
与此同时,你还会看到LED 呈现不同颜色的光。
命令是一个“unsigned char”型数据,只有后三位有效,每一位代表一个灯,从高到低依次代表红、绿、蓝,1 表示亮,0 表示灭。例如命令=4 则亮红灯,命令=7 则三个灯全亮。
参考资料:嵌入式Linux 驱动开发实战指南-基于STM32MP1 系列
相关文章:
第九节 使用设备树实现RGB 灯驱动
通过上一小节的学习,我们已经能够编写简单的设备树节点,并且使用常用的of 函数从设备树中获取我们想要的节点资源。这一小节我们带领大家使用设备树编写一个简单的RGB 灯驱动程序,加深对设备树的理解。 实验说明 本节实验使用到STM32MP1 开…...

Ubuntu 系统下Docker安装与使用
Ubuntu 系统下Docker安装与使用Docker安装与使用Docker安装安装环境准备工作系统要求卸载旧版本Ubuntu 14.04 可选内核模块Ubuntu 16.04 使用 APT 安装安装 Docker CE使用脚本自动安装启动 Docker CE建立 docker 用户组测试 Docker 是否安装正确镜像加速Docker使用拉取镜像创建…...
DHCP安全及防范
DHCP安全及防范DHCP面临的威胁DHCP饿死攻击仿冒DHCP Server攻击DHCP中间人攻击DHCP Snooping技术的出现DHCP Snooping防饿死攻击DHCP Snooping防止仿冒DHCP Server攻击DHCP Snooping防止中间人攻击DHCP Snooping防止仿冒DHCP报文攻击DHCP面临的威胁 网络攻击无处不在ÿ…...

【流畅的python】第一章 Python数据模型
文章目录第一章 Python 数据模型1.1 python风格的纸牌1.2 如何使用特殊方法-通过创建一个向量类的例子1.3 特殊方法汇总第一章 Python 数据模型 python最好的品质是一致性 python解释器碰到特殊句法时,会使用特殊方法去激活一些基本的对象操作 这些特殊的方法以两个…...
from文件突然全部变为类cs右击无法显示设计界面
右击也不显示查看设计器 工程文件 .csproj中将 <Compile Include"OperatorWindows\Connection.cs" /> <Compile Include"OperatorWindows\Connection.Designer.cs"> <DependentUpon>Connection.cs</DependentUpon> &…...

使用arthas中vmtool命令查看spring容器中对象的某个属性
场景: 线上环境我想查看spring中容器某个对象的属性值 vmtool命令 方式一: vmtool --action getInstances -c [类加载器的hash] --className [目标类全路径] --limit 10 -x 2 实例:查询该类的全部属性情况(该类是一个spri…...

四种幂等性解决方案
什么是幂等性? 幂等是一个数学与计算机学概念,在数学中某一元运算为幂等时,其作用在任一元素两次后会和其作用一次的结果相同。 在计算机中编程中,一个幂等操作的特点是其任意多次执行所产生的影响均与一次执行的影响相同。 幂等…...

【Nacos】Nacos配置中心客户端配置更新源码分析
上文我们说了服务启动的时候从远程Nacos服务端拉取配置,这节我们来说下Nacos服务端配置的变动怎么实时通知到客户端,首先需要注册监听器。 注册监听器 NacosContextRefresher类会监听应用启动发布的ApplicationReadyEvent事件,然后进行配置…...

按钮防抖与节流-vue2
防抖与节流,应用场景有很多,例如:禁止重复提交数据的场景、搜索框输入搜索条件,待输入停止后再开始搜索。 防抖 点击button按钮,设置定时器,在规定的时间内再次点击会重置定时器重新计时,在规定…...

PyTorch学习笔记:nn.SmoothL1Loss——平滑L1损失
PyTorch学习笔记:nn.SmoothL1Loss——平滑L1损失 torch.nn.SmoothL1Loss(size_averageNone, reduceNone, reductionmean, beta1.0)功能:创建一个平滑后的L1L_1L1损失函数,即Smooth L1: l(x,y)L{l1,…,lN}Tl(x,y)L\{l_1,\dots,l…...

2年时间,涨薪20k,想拿高薪还真不能老老实实的工作...
2016年开始了我的测试生活。 2016年刚到公司的时候,我做的是测试工程师。做测试工程师是我对自己的职业规划。说实话,我能得到这份工作真的很高兴。 来公司的第一个星期,因为有一个项目缺人,所以部门经理提前结束了我的考核期&a…...

Spark - Spark SQL中RBO, CBO与AQE简单介绍
Spark SQL核心是Catalyst, Catalyst执行流程主要分4个阶段, 语句解析, 逻辑计划与优化, 物理计划与优化, 代码生成 前三个阶段都由Catalyst负责, 其中, 逻辑计划的优化采用RBO思路, 物理计划的优化采用CBO思路 RBO (Rule Based Optimization) 基于规则优化, 通过一系列预定好…...

NeurIPS/ICLR/ICML AI三大会国内高校和企业近年中稿量完整统计
点击文末公众号卡片,找对地方,轻松参会。 近日,有群友转发了一张网图,统计了近年来中国所有单位在NeurIPS、ICLR、ICML论文情况。原图如下: 中稿数100: 清华(1) 北大(2) 占比:22.6%。 累计数…...
Android IO 框架 Okio 的实现原理,到底哪里 OK?
本文已收录到 AndroidFamily,技术和职场问题,请关注公众号 [彭旭锐] 提问。 前言 大家好,我是小彭。 今天,我们来讨论一个 Square 开源的 I/O 框架 Okio,我们最开始接触到 Okio 框架还是源于 Square 家的 OkHttp 网络…...

一文讲解Linux 设备模型 kobject,kset
设备驱动模型 面试的时候,有面试官会问,什么是Linux 设备驱动模型?你要怎么回答? 这个问题,突然这么一问,可能你会愣住不知道怎么回答,因为Linux 设备驱动模型是一个比较整体的概念࿰…...

linux配置密码过期的安全策略(/etc/login.defs的解读)
长期不更换密码很容易导致密码被破解,而linux的密码过期安全策略主要在/etc/login.defs中配置。一、/etc/login.defs文件的参数解读1、/etc/login.defs文件的内容示例[rootlocalhost ~]# cat /etc/login.defs # # Please note that the parameters in this configur…...

c_character_string 字符串----我认真的弄明白了,也希望你们也是。
字符串 1. 字符串长度strlen 1.1strlen 函数介绍 size_t strlen ( const char * str );strlen ——string length strlen 的头文件是 #include <string.h> 参数指向的字符串必须要以 ‘\0’ 结束。 strlen 是求字符串长度的函数,统计的是字符串中\0之前出现…...
spring面试题 一
一、为了降低Java开发的复杂性,Spring采取了那4种关键策略 基于POJO的轻量级和最小侵入性编程; 通过依赖注入和面向接口实现松耦合; 基于切面和惯例进行声明式编程; 通过切面和模板减少样板式代码。 二、Spring框架的核心&am…...

C++中char *,char a[ ]的特殊应用
1.数组的本质 数组是多个元素的集合,在内存中分布在地址相连的单元中,所以可以通过其下标访问不同单元的元素。 2.指针 指针也是一种变量,只不过它的内存单元中保存的是一个标识其他位置的地址。 3.字符串常量的本质是它的第一个字符的地…...
【Windows10】电脑副屏无法调节屏幕亮度?解决方法
先说下情况,本人对显示器不太懂,属于小白 这个副屏无法调节的问题出现也已经很久了,但是之前亮度适合就无所谓,今天突然按了之后很亮,于是就找问题。 第一步,我直接百度,遇事不决,百…...

终极解决方案:5分钟完成DOCX到LaTeX的专业转换指南 [特殊字符]
终极解决方案:5分钟完成DOCX到LaTeX的专业转换指南 🚀 【免费下载链接】docx2tex Converts Microsoft Word docx to LaTeX 项目地址: https://gitcode.com/gh_mirrors/do/docx2tex 还在为Word文档转换LaTeX格式而烦恼吗?docx2tex就是你…...

windows 下使用 arthas 排查接口慢的问题
文章目录1、windows 如何安装 arthas2、在排查问题之前,先启动 arthas3、排查某个慢接口&方法4、更多功能参考官网文档1、windows 如何安装 arthas 进入 https://github.com/alibaba/arthas/releases,点击 arthas-bin.zip 进行下载。 解压下载完成后…...

激发创意:利用快马平台ai模型辅助设计与优化cmhhc算法
激发创意:利用快马平台AI模型辅助设计与优化CMHHC算法 最近在做一个字符串压缩相关的项目,需要实现一个自定义的压缩算法CMHHC。这个算法的核心思想其实很简单:对于连续出现的相同字符,用该字符加上出现次数来表示。比如"aa…...

激光+视觉+IMU+RTK融合实战:如何用多传感器打造厘米级三维重建系统?
激光视觉IMURTK融合实战:如何用多传感器打造厘米级三维重建系统? 在自动驾驶和机器人领域,三维重建技术正经历着从实验室走向工业落地的关键转折。传统单一传感器方案已无法满足复杂场景下的精度需求,而多传感器融合正成为突破性能…...

PXE装机避坑大全:从TFTP根目录设置到Kickstart无人值守的13个常见错误修复
PXE装机避坑大全:从TFTP根目录设置到Kickstart无人值守的13个常见错误修复 在企业级IT运维中,PXE(预启动执行环境)网络装机技术因其高效、自动化的特点,已成为服务器批量部署的标配方案。但看似简单的PXE部署流程背后&…...

Zephyr与MCUBoot的深度整合:从构建到安全启动的完整指南
1. 为什么需要安全启动? 在嵌入式开发中,设备固件的安全性往往是最容易被忽视的一环。想象一下,如果你的智能门锁固件被恶意篡改,或者医疗设备的程序被非法替换,后果会有多严重?这就是为什么我们需要MCUBoo…...

Anaconda虚拟环境管理:为春联生成模型创建独立Python空间
Anaconda虚拟环境管理:为春联生成模型创建独立Python空间 你是不是也遇到过这种情况?电脑上装了好几个Python项目,有的需要TensorFlow 2.0,有的却只能用TensorFlow 1.x,结果为了运行一个项目,把整个系统的…...

Gemma-3-270m多场景落地:政务热线知识库问答、医疗术语解释系统
Gemma-3-270m多场景落地:政务热线知识库问答、医疗术语解释系统 1. 快速上手:部署你的第一个Gemma-3-270m服务 想要快速体验Gemma-3-270m的强大能力?通过Ollama部署只需几个简单步骤。 1.1 环境准备与模型选择 首先确保你已经安装了Ollam…...

ArduinoLog:面向MCU的零开销C++嵌入式日志框架
1. ArduinoLog 项目概述ArduinoLog 是一款专为 Arduino 及兼容嵌入式平台(包括 AVR、SAM、ESP8266 等)设计的轻量级 C 日志框架。其核心设计哲学是“零运行时开销、零动态内存分配、全编译期可控”,在资源极度受限的微控制器环境中࿰…...

树莓派4B上跑YOLOv8n-NCNN,实测2FPS?别急,这有份从模型转换到C++代码的完整调优指南
树莓派4B上跑YOLOv8n-NCNN性能调优实战:从2FPS到流畅推理的完整指南 当你在树莓派4B上成功部署YOLOv8n-NCNN后,发现推理速度只有可怜的2FPS时,是否感到沮丧?别担心,这不是硬件性能的终点。本文将带你深入分析性能瓶颈&…...