通过融合UGV的地图信息和IMU的惯性测量数据,实现对车辆精确位置和运动状态的估计和跟踪研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
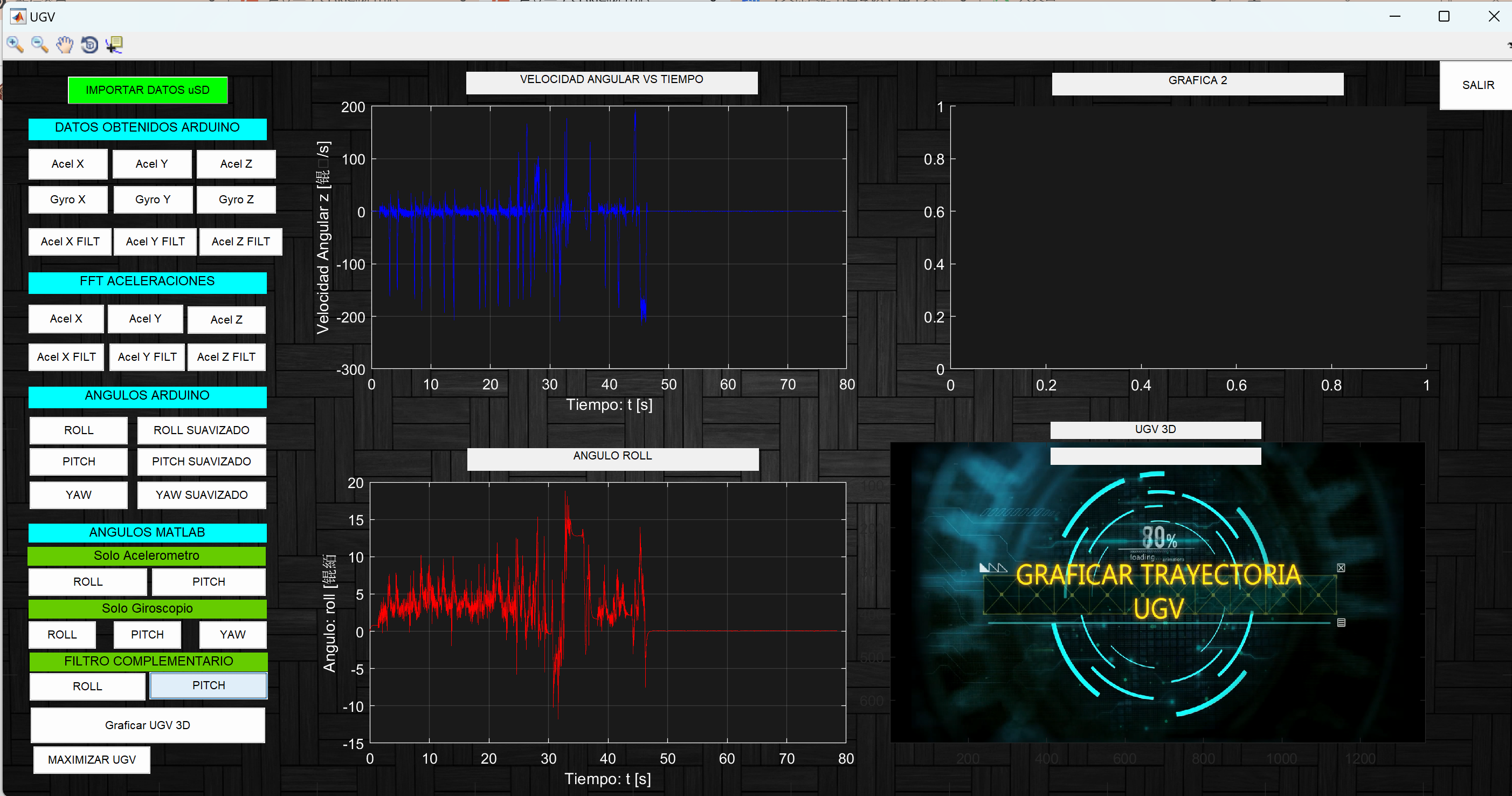
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
地图汽车UGV(无人地面车辆)与IMU(惯性测量单元)的跟踪研究在自动驾驶和导航领域具有重要意义。这项研究旨在通过融合UGV的地图信息和IMU的惯性测量数据,实现对车辆精确位置和运动状态的估计和跟踪。
对于地图汽车UGV来说,地图提供了预先建立的环境信息,包括道路网络、标记物、障碍物等。而IMU则通过测量车辆的加速度和角速度,提供了关于车辆运动的即时测量值。将这两者融合起来,可以实现对车辆位置、方向和运动轨迹的连续估计。
在地图汽车UGV + IMU跟踪研究中,通常会使用状态估计方法,比如扩展卡尔曼滤波器(EKF)或无迹卡尔曼滤波器(UKF)。这些方法通过组合地图信息、IMU数据和其他传感器数据(如视觉、激光雷达等),进行状态的预测和更新,以实现对车辆位置的实时估计。
此外,地图汽车UGV + IMU跟踪研究还需要考虑传感器数据之间的时间同步、精度误差以及环境变化对跟踪性能的影响。因此,研究人员还需要进行传感器校准、数据预处理和误差补偿等工作,以提高跟踪的准确性和鲁棒性。
这项研究的目标是实现对地图汽车UGV的精确跟踪和定位,为自动驾驶、路径规划和导航系统等提供可靠的位置信息,以及增强对车辆运动状态的理解和判断能力。
📚2 运行结果
部分代码:
function [x4 ,y4 ,z4]=Rotacion3D_q2(x,y,z,teta3,teta2,teta)
%Grafica vector en 3D, x y z representan los vectores desde donde empieza el movimiento ..teta3,teta2,teta (en �) representan los angulos alrededor de los ejes X,Y,Z de la IMU
teta3=(teta3*2*pi)/360;
teta2=(teta2*2*pi)/360;
teta=(teta*2*pi)/360;%OPERADOR ROTACION CUATERNION v�=q*v*r (r=q^-1)
%VECTOR SOBRE EL QUE GIRO b multiplicado por sin(angulo que giro/2)
b=sin(teta/2)*z;
Q = [cos(teta/2) b(1) b(2) b(3)];%Quaternion
R = [cos(teta/2) -b(1) -b(2) -b(3)];%INVERSO del Quaternion Q
d1=[0 x(1) x(2) x(3)];
d2=[0 y(1) y(2) y(3)];
d3=[0 z(1) z(2) z(3)];
n1 = quatmultiply(Q,d1);
n1 = quatmultiply(n1,R);
n2 = quatmultiply(Q,d2);
n2 = quatmultiply(n2,R);
n3 = quatmultiply(Q,d3);
n3 = quatmultiply(n3,R);x2=[n1(2) n1(3) n1(4)];
y2=[n2(2) n2(3) n2(4)];
z2=[n3(2) n3(3) n3(4)];%Ahora un giro de teta2 con respecto al eje y
%VECTOR SOBRE EL QUE GIRO b multiplicado por sin(angulo que giro/2)
b=sin(teta2/2)*y2;
Q = [cos(teta2/2) b(1) b(2) b(3)];%Quaternion
R = [cos(teta2/2) -b(1) -b(2) -b(3)];%INVERSO del Quaternion Qfunction [x4 ,y4 ,z4]=Rotacion3D_q2(x,y,z,teta3,teta2,teta)
%Grafica vector en 3D, x y z representan los vectores desde donde empieza el movimiento ..teta3,teta2,teta (en �) representan los angulos alrededor de los ejes X,Y,Z de la IMU
teta3=(teta3*2*pi)/360;
teta2=(teta2*2*pi)/360;
teta=(teta*2*pi)/360;
%OPERADOR ROTACION CUATERNION v�=q*v*r (r=q^-1)
%VECTOR SOBRE EL QUE GIRO b multiplicado por sin(angulo que giro/2)
b=sin(teta/2)*z;
Q = [cos(teta/2) b(1) b(2) b(3)];%Quaternion
R = [cos(teta/2) -b(1) -b(2) -b(3)];%INVERSO del Quaternion Q
d1=[0 x(1) x(2) x(3)];
d2=[0 y(1) y(2) y(3)];
d3=[0 z(1) z(2) z(3)];
n1 = quatmultiply(Q,d1);
n1 = quatmultiply(n1,R);
n2 = quatmultiply(Q,d2);
n2 = quatmultiply(n2,R);
n3 = quatmultiply(Q,d3);
n3 = quatmultiply(n3,R);
x2=[n1(2) n1(3) n1(4)];
y2=[n2(2) n2(3) n2(4)];
z2=[n3(2) n3(3) n3(4)];
%Ahora un giro de teta2 con respecto al eje y
%VECTOR SOBRE EL QUE GIRO b multiplicado por sin(angulo que giro/2)
b=sin(teta2/2)*y2;
Q = [cos(teta2/2) b(1) b(2) b(3)];%Quaternion
R = [cos(teta2/2) -b(1) -b(2) -b(3)];%INVERSO del Quaternion Q
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]杨傲.基于RGB-D与IMU融合的SLAM算法研究与实现[J].[2023-10-04].
[2]姚姗.基于GPS/IMU数据融合的车辆位姿控制方法研究[D].燕山大学[2023-10-04].
[3]阮凤立,安倩,王克己,等.室内定位中融合IMU的地图匹配算法研究与实现[J].数字通信世界, 2014(S2):4.DOI:10.3969/j.issn.1672-7274.2014.z1.003.
🌈4 Matlab代码实现
相关文章:
通过融合UGV的地图信息和IMU的惯性测量数据,实现对车辆精确位置和运动状态的估计和跟踪研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

『Linux』Linux环境搭建 | 阿里云云服务器白嫖 | Xshell环境配置
🔥博客主页: 小羊失眠啦 🔖系列专栏: C语言、Linux 🌥️每日语录:时间,都是公平的,不公平的,只是现在的自己,对未来的自己。 ❤️感谢大家点赞👍收…...
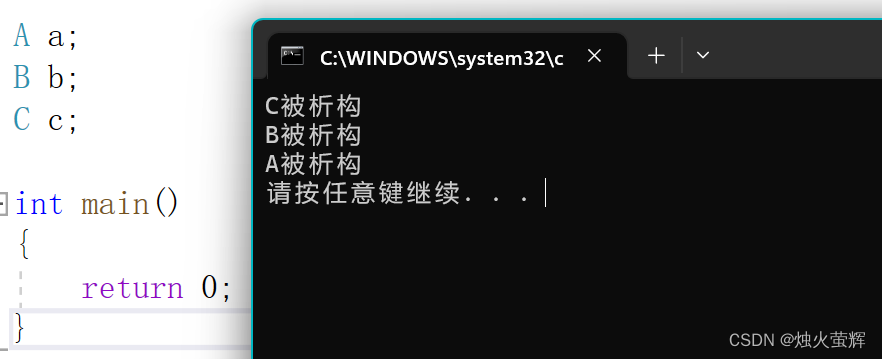
C++ 类和对象篇(五) 析构函数
目录 一、概念 1. 析构函数是什么? 2. 为什么要有析构函数? 3. 怎么用析构函数? 3.1 创建析构函数 3.2 调用析构函数 二、特性 三、由编译器生成的默认析构函数 四、对象的析构顺序 1. 局部对象 2. new出来的堆对象 3. 全局对象 一、概念 1…...

find 与 cp 命令组合使用
查找到文件后,拷贝到指定路径 find ~/Downloads/ -name *.torrent -exec cp {} ~/Downloads/myTorrent \;\;前面有个空格,要注意,这是固定结构,请不要尝试改变 上面命令是在Downloads 目标中查找后缀为torrent所有文件࿰…...
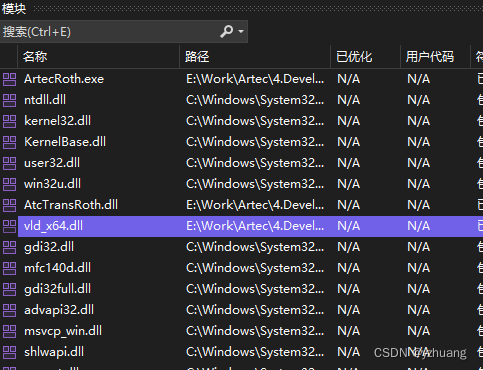
用VLD调查VC内存泄漏
一、发现内存泄漏 使用VS2022,发现提示有内存泄漏,检查了所有的new,确认都有相应的delete释放。 Detected memory leaks! Dumping objects -> {1914} normal block at 0x0000021FDFFBD2E0, 48 bytes long.Data: < >…...

【Java 进阶篇】使用 JDBCTemplate 执行 DQL 语句详解
在前面的文章中,我们已经学习了如何使用 Spring 的 JDBCTemplate 执行 DML(Data Manipulation Language)操作,包括插入、更新和删除操作。现在,让我们来深入了解如何使用 JDBCTemplate 执行 DQL(Data Query…...

了解了spring mvc web容器中一个http请求的全过程,能给我们提升多少武力值
继上一篇文章什么,这年头还有人不知道404_cow__sky的博客-CSDN博客后,有些同学发现,学了之后有啥用,有什么实际场景可以用到吗?程序员就是这样,不习惯于纸上谈兵,给一个场景show me code才是最实…...

【BBC新闻文章分类】使用 TF 2.0和 LSTM 的文本分类
一、说明 NLP上的许多创新是如何将上下文添加到词向量中。常见的方法之一是使用递归神经网络...

set和map的封装
目录 介绍 红黑树代码 set insert的迭代器转换问题 为什么会有这样的问题? 如何解决 代码 map 注意点 代码 介绍 set和map的底层都是红黑树,所以我们可以在自己实现的红黑树(简易版)的基础上,进行封装,成为简易的set和map 红黑树代码 #pragma once#include <…...

java基础练习--基础语法
预备知识:Java基本语法、分支、循环、数组和字符串 7-1 累加器 请你实现一个累加器。输入n个非负整数,输出他们的和。 1<n<1000,而每个数则<10000。 输入格式: 输入包括两行。 第一行:包括一个整数n,表示总共有n个数。 第二行:包…...

Android12 OTA编译差分包报错问题
前言 在Ubuntu 20.04.4 LTS系统中编译Android12 OTA差分包的时候提示如下报错log: Warning: releasetools script should be invoked as hermetic Python executable -- build and run ota_from_target_files directly. Traceback (most recent call last):File "./bu…...

现代c++手撸2309神经网络最简化版230901
用c++输入数据:vector<vector<float>> inputs = { {1, 1}, {1, 0} };数据targets={0,1}; 测试:vector<vector<float>> inputs22 = { {1, 0}, {1,1} }; 构建神经网络,例如:NeuralNetwork nn({ 2, 4, 1 }); 则网络有四层、输入层2个节点、输出层1个节…...

Qt之显示PDF文件
之前使用过mupdf库,能够成功显示pdf,但是我用着有BUG,不太理解它的代码,搞了好久都不行。后面又试了其他库,如pdfium、popler、下载了很多例程,都跑不起来!后面偶然得知xpdf库,看起来…...
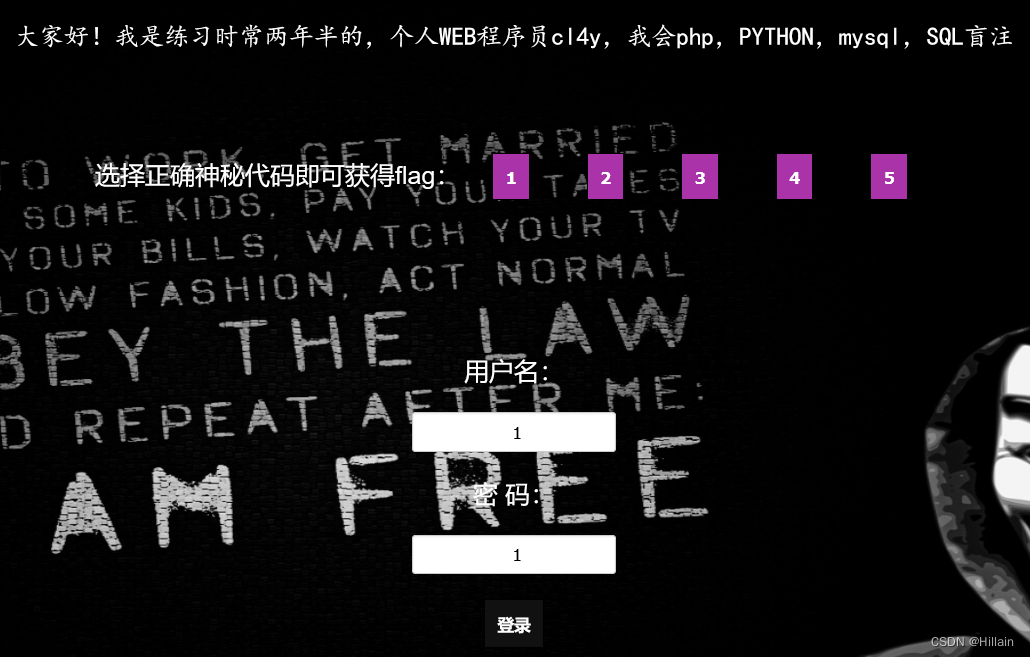
[极客大挑战 2019]FinalSQL - 异或盲注
1、这题的关键是找注入点,如果选择用户名、密码作为输入点就麻烦了 2、注入点:按钮,点击就传id;当id1时,提示Click others 可以利用id的特性,构造异或匹配 payload: f"1^(ord(substr((select…...
【Go语言实战】(25) 分布式算法 MapReduce
MapReduce 写在前面 身为大数据专业的学生,其实大学我也多多少少接触过mapreduce,但是当时觉得这玩意太老了,觉得这和php一样会被时代淘汰。只能说当时确实太年轻了,没有好好珍惜那时候的学习资源… 现在回过头来看mapreduce&a…...

【网络安全-信息收集】网络安全之信息收集和信息收集工具讲解(提供工具)
工具下载百度网盘链接(包含所有用到的工具): 百度网盘 请输入提取码百度网盘为您提供文件的网络备份、同步和分享服务。空间大、速度快、安全稳固,支持教育网加速,支持手机端。注册使用百度网盘即可享受免费存储空间https://pan.…...

战火使命ssr排名,战火使命角色强度排行
在战火使命中,很多玩家都在关注SSR角色的强度排行,那么,下面就为大家分享一下小编整理的最新战火使命ssr排名,一起来看看吧。 关注【娱乐天梯】,获取内部福利号 一、SSR角色排名榜: 1. 克拉拉、艾蕾娜、杰西…...
 函数—背景颜色渐变设计)
CSS之linear-gradient( ) 函数—背景颜色渐变设计
目录 linear-gradient( ) 函数 简介: 语法: 详解: 例如: linear-gradient( ) 函数 简介: linear-gradient 函数是 CSS 中用于创建线性渐变的函数。它接受一个或多个参数,并使用这些参数创建一个渐变。…...

[Unity]未能加载一个或多个断点问题
【背景】 大家2023国庆快乐,虽然是假期,我还是继续码些文章。 今天写项目时遇到个环境问题,新建脚本时双击调起VS编辑器,忽然提示无法加载一个或多个断点(当时忘记截图了,现在已解决,就不上图了…...
Qt中的基础数据类型
1.基础类型 因为Qt是一个C++ 框架, 因此C++中所有的语法和数据类型在Qt中都是被支持的, 但是Qt中也定义了一些属于自己的数据类型, 下边给大家介绍一下这些基础的数类型 QT基本数据类型定义在#include <QtGlobal> 中,QT基本数据类型有: 类型名称注释备注qint8signed ch…...

观成科技:隐蔽隧道工具Ligolo-ng加密流量分析
1.工具介绍 Ligolo-ng是一款由go编写的高效隧道工具,该工具基于TUN接口实现其功能,利用反向TCP/TLS连接建立一条隐蔽的通信信道,支持使用Let’s Encrypt自动生成证书。Ligolo-ng的通信隐蔽性体现在其支持多种连接方式,适应复杂网…...

HTML 语义化
目录 HTML 语义化HTML5 新特性HTML 语义化的好处语义化标签的使用场景最佳实践 HTML 语义化 HTML5 新特性 标准答案: 语义化标签: <header>:页头<nav>:导航<main>:主要内容<article>&#x…...

【OSG学习笔记】Day 18: 碰撞检测与物理交互
物理引擎(Physics Engine) 物理引擎 是一种通过计算机模拟物理规律(如力学、碰撞、重力、流体动力学等)的软件工具或库。 它的核心目标是在虚拟环境中逼真地模拟物体的运动和交互,广泛应用于 游戏开发、动画制作、虚…...

SciencePlots——绘制论文中的图片
文章目录 安装一、风格二、1 资源 安装 # 安装最新版 pip install githttps://github.com/garrettj403/SciencePlots.git# 安装稳定版 pip install SciencePlots一、风格 简单好用的深度学习论文绘图专用工具包–Science Plot 二、 1 资源 论文绘图神器来了:一行…...

Java - Mysql数据类型对应
Mysql数据类型java数据类型备注整型INT/INTEGERint / java.lang.Integer–BIGINTlong/java.lang.Long–––浮点型FLOATfloat/java.lang.FloatDOUBLEdouble/java.lang.Double–DECIMAL/NUMERICjava.math.BigDecimal字符串型CHARjava.lang.String固定长度字符串VARCHARjava.lang…...
)
postgresql|数据库|只读用户的创建和删除(备忘)
CREATE USER read_only WITH PASSWORD 密码 -- 连接到xxx数据库 \c xxx -- 授予对xxx数据库的只读权限 GRANT CONNECT ON DATABASE xxx TO read_only; GRANT USAGE ON SCHEMA public TO read_only; GRANT SELECT ON ALL TABLES IN SCHEMA public TO read_only; GRANT EXECUTE O…...

Qwen3-Embedding-0.6B深度解析:多语言语义检索的轻量级利器
第一章 引言:语义表示的新时代挑战与Qwen3的破局之路 1.1 文本嵌入的核心价值与技术演进 在人工智能领域,文本嵌入技术如同连接自然语言与机器理解的“神经突触”——它将人类语言转化为计算机可计算的语义向量,支撑着搜索引擎、推荐系统、…...
学习STC51单片机31(芯片为STC89C52RCRC)OLED显示屏1
每日一言 生活的美好,总是藏在那些你咬牙坚持的日子里。 硬件:OLED 以后要用到OLED的时候找到这个文件 OLED的设备地址 SSD1306"SSD" 是品牌缩写,"1306" 是产品编号。 驱动 OLED 屏幕的 IIC 总线数据传输格式 示意图 …...

使用 Streamlit 构建支持主流大模型与 Ollama 的轻量级统一平台
🎯 使用 Streamlit 构建支持主流大模型与 Ollama 的轻量级统一平台 📌 项目背景 随着大语言模型(LLM)的广泛应用,开发者常面临多个挑战: 各大模型(OpenAI、Claude、Gemini、Ollama)接口风格不统一;缺乏一个统一平台进行模型调用与测试;本地模型 Ollama 的集成与前…...
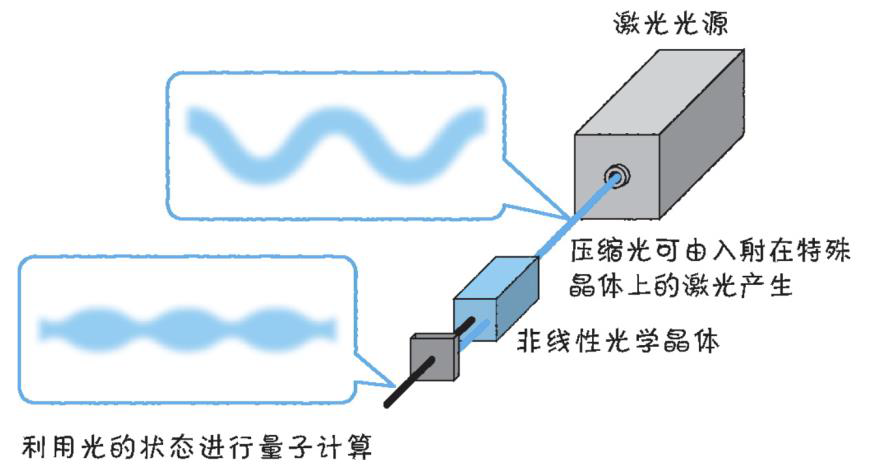
以光量子为例,详解量子获取方式
光量子技术获取量子比特可在室温下进行。该方式有望通过与名为硅光子学(silicon photonics)的光波导(optical waveguide)芯片制造技术和光纤等光通信技术相结合来实现量子计算机。量子力学中,光既是波又是粒子。光子本…...