yolov5及yolov7实战之剪枝
之前有讲过一次yolov5的剪枝:yolov5实战之模型剪枝_yolov5模型剪枝-CSDN博客
当时基于的是比较老的yolov5版本,剪枝对整个训练代码的改动也比较多。最近发现一个比较好用的剪枝库,可以在不怎么改动原有训练代码的情况下,实现剪枝的操作,这篇文章就简单介绍一下,剪枝的概念以及为什么要剪枝可以参看上一篇,这里就不赘述了。
Torch-Pruning
VainF/Torch-Pruning: [CVPR 2023] Towards Any Structural Pruning; LLMs / Diffusion / Transformers / YOLOv8 / CNNs (github.com)
今天我们要用到的就是这个剪枝库,这个库集成了很多剪枝的方法,毕竟使用比较简单。
用法
这个剪枝库既有low level的剪枝,也就是手动控制剪枝哪些层,也有high level的剪枝,就是使用预设的剪枝算法,自动选择剪枝的部分。对于我们来说,更适合使用high level剪枝。具体的这里使用和上一篇yolov5里面的剪枝一样的算法,在这个库里叫BNScalePruner。
安装
首先我们需要安装上面提到的库,有两种方式来安装:
pip install torch-pruning
或源码安装(当碰到bug发布版本没修复,源码修复的时候):
pip install git+https://github.com/VainF/Torch-Pruning.git
稀疏化训练
为了更好的剪枝,我们在训练剪枝前的网络时,推荐开启稀疏化训练,利用这个库,我们可以很方便的实现这个操作。
首先在我们的训练代码中定义好剪枝器, 这里的opt.prune是我自己加的来控制是否开启稀疏化训练的标志:
# prune
if opt.prune:examle_input = torch.randn(1, 3, imgsz, imgsz).to(device)imp = tp.importance.BNScaleImportance()pruner = tp.pruner.BNScalePruner(model, examle_input, imp,reg=0.0001)
稀疏化训练主要需要设置reg参数,一般设置0.001~1e-6之间。
定义好剪枝器后,在训练代码的scaler.scale(loss).backward()之后,添加如下代码:
if opt.prune:pruner.regularize(model)
即可实现稀疏化训练。
剪枝
稀疏化训练后(也可以不做稀疏化训练),我们就可以进行剪枝操作了。这个库可以在训练中交互式进行多次剪枝,简单起见,我们这里分离剪枝和训练的代码,只进行剪枝操作。
import torch_pruning as tp
from models.experimental import attempt_load
import torchweights = "yolov7.pt"
model = attempt_load(weights, map_location=torch.device('cuda:0'), fuse=False)
for p in model.parameters():p.requires_grad = True
ignored_layers = []
from models.yolo import Detect, IDetect
from models.common import ImplicitA, ImplicitM
for m in model.modules():if isinstance(m, (Detect,IDetect)):ignored_layers.append(m.m)
unwrapped_parameters = []
for name, m in model.named_parameters():if isinstance(m, (ImplicitA,ImplicitM,)):unwrapped_parameters.append((name,1)) # pruning 1st dimension of implicit matrixprint(ignored_layers)
example_inputs = torch.rand(1, 3, 416, 416, device='cuda:0')
imp = tp.importance.BNScaleImportance()
pruner = tp.pruner.BNScalePruner(model, example_inputs, imp,ignored_layers=ignored_layers,unwrapped_parameters=unwrapped_parameters,global_pruning=True,ch_sparsity=0.3,round_to=8,)base_macs, base_nparams = tp.utils.count_ops_and_params(model, example_inputs)
pruner.step()
pruned_model = pruner.model
pruned_macs, pruned_nparams = tp.utils.count_ops_and_params(pruned_model, example_inputs)
print(f"macs: {base_macs} -> {pruned_macs}")
print(f"nparams: {base_nparams} -> {pruned_nparams}")
macs_cutoff_ratio = (base_macs - pruned_macs) / base_macs
nparams_cutoff_ratio = (base_nparams - pruned_nparams) / base_nparams
print(f"macs cutoff ratio: {macs_cutoff_ratio}")
print(f"nparams cutoff ratio: {nparams_cutoff_ratio}")
save_path = weights.replace(".pt", "_pruned_bn_0.3.pt")torch.save({"model": pruned_model.module if hasattr(pruned_model, 'module') else pruned_model}, save_path)
去掉一些计算剪枝比例的,保存代码等代码外,剪枝操作其实由pruner.step()这一步完成。这里我们主要需要设置的参数是:
- ch_sparsity: 可以理解成剪枝的比例,越大剪得越多
- global_pruning: True表示整个模型的权重按一个整体排序后剪枝,False表示按分组内部按比例剪枝
- round_to: 剪枝后的通道保留为多少的倍数,一般在硬件上,保留8的倍数
微调
经过剪枝的网络,精度是下降比较明显的,需要再在数据上finetune一些epoch才能把精度拉回来。
yolov7默认是通过yaml文件创建模型结构,然后再载入权重进行训练的,而我们剪枝后的模型是没有模型结构文件的,因此需要对训练代码做一定的修改,具体而言,只是对模型的载入进行一点修改。其中opt.finetune是用来控制是否处于finetune模式的标志位。
if opt.finetune: # for model without cfgnew = torch.load(weights, map_location=device) # createmodel = new["model"]print("Finetune Mode...")
elif pretrained:
...
比较简单的改法是这样,从checkpoint中载入结构和权重,还有一种方式则是修改yolov7的Model类,这个在后面讲yolov7剪枝后蒸馏的时候再讲,暂时用上面这种方式就可以了。
评测
我在自己的任务上的效果是yolov7剪枝50%,微调后基本上能达到剪枝前的map,没记错的话这是和稀疏化训练的比,毕竟开启稀疏化训练本身也会掉点。大家可以在自己的任务上尝试一下,总体上精度还是可以的
结语
这篇文章简述了以下yolov7的剪枝,yolov5也可用,希望对大家有帮助。

相关文章:
yolov5及yolov7实战之剪枝
之前有讲过一次yolov5的剪枝:yolov5实战之模型剪枝_yolov5模型剪枝-CSDN博客 当时基于的是比较老的yolov5版本,剪枝对整个训练代码的改动也比较多。最近发现一个比较好用的剪枝库,可以在不怎么改动原有训练代码的情况下,实现剪枝的…...
力扣第257题 二叉树的所有路径 c++ 树 深度优先搜索 字符串 回溯 二叉树
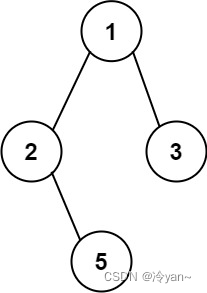
题目 257. 二叉树的所有路径 简单 给你一个二叉树的根节点 root ,按 任意顺序 ,返回所有从根节点到叶子节点的路径。 叶子节点 是指没有子节点的节点。 示例 1: 输入:root [1,2,3,null,5] 输出:["1->2-&g…...

保研之旅·终
一.背景 学校: 中211 通信工程专业 成绩: 绩点前3% 英语: CET4:523 CET6:505 竞赛:两个国奖,若干省奖 科研:两项校级大创,无论文产出 二.基本情况 夏令营入营: 哈工大…...

达梦数据库 视图 错误 [22003]: 数据溢出
今天通过DBeaver连接访问达梦数据库的一个视图,报错:错误 [22003]: 数据溢出 经过分析,原因是视图字段的数据类型和原表的数据类型不一致造成的...
【文献阅读】【NMI 2022】LocalTransform :基于广义模板的有机反应性准确预测图神经网络
预测有机反应产物是有机化学的一个基本问题。基于成熟有机化学知识,化学家现在能够设计实验来制造用于不同目的的新分子。但是,它需要经验丰富的专业化学家来准确预测化学反应的结果。为了进一步帮助有机化学家并在数字化学时代实现全自动发现࿰…...

QQ浏览器怎么才能设置默认搜索引擎为百度
问题: 打开QQ浏览器,搜索相关信息时发现总是默认为”搜狗搜索引擎“,想将其转为”百度搜索引擎“ 解决: 1、点击浏览器右侧”菜单“图标,选择”设置“,如下图所示: 2、在”常规设置“中的”搜…...

Go Gin Gorm Casbin权限管理实现 - 3. 实现Gin鉴权中间件
文章目录 0. 背景1. 准备工作2. gin中间件2.1 中间件代码2.2 中间件使用2.3 测试中间件使用结果 3. 添加权限管理API3.1 获取所有用户3.2 获取所有角色组3.3 获取所有角色组的策略3.4 修改角色组策略3.5 删除角色组策略3.6 添加用户到组3.7 从组中删除用户3.8 测试API 4. 最终目…...

js 封装一个异步任务函数
// 异步任务 封装 // 1,定义函数 // 2,使用核心api(queueMicrotask,MutationObserver,setTimeout) function runAsynctask (callback){if(typeof queueMicrotask "function" ){queueMicrotask(callback)}else if( typeof MutationObserver "functio…...

目标检测YOLO实战应用案例100讲-基于无人机航拍图像的目标检测
目录 前言 国内外研究现状 目标检测研究现状 无人机航拍目标检测研究现状...
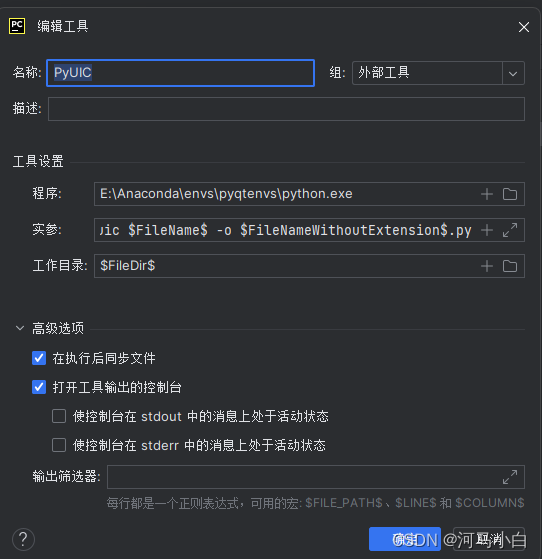
PyQt5配置踩坑
安装步骤比较简单,这里只说一下我踩的坑,以及希望一些大佬可以给点建议。 一、QtDesigner 这个配置比较简单,直接就能用,我的配置如下图: C:\Users\lenovo\AppData\Roaming\Python\Python311\site-packages\qt5_app…...
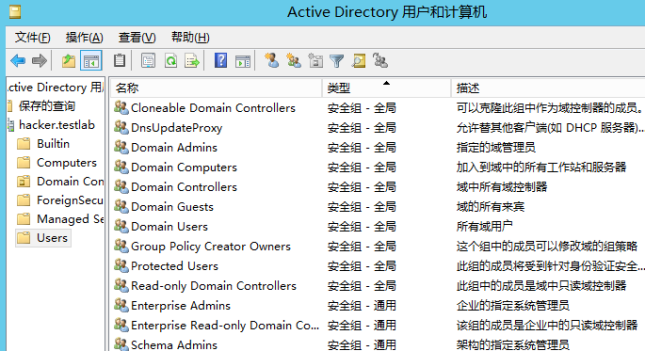
内网渗透笔记之内网基础知识
0x01 内网概述 内网也指局域网(Local Area Network,LAN)是指在某一区域内由多台计算机互联成的计算机组。一般是方圆几千米以内。局域网可以实现文件管理、应用软件共享、打印机共享、工作组内的历程安排、电子邮件和传真通信服务等功能。 内…...
vue3+elementPlus:el-select选择器里添加按钮button
vue3elementPlus:el-select选择器里添加按钮button,在el-select的option后面添加button //html <el-select class"selectIcon" value-key"id" v-model"store.state.HeaderfilterText" multiple collapse-tagscollapse-…...

Android 模拟点击
Android 模拟点击 1.通过代码的方式实现 通过模拟MotionEvent的方式实现 //----------------模拟点击--------------------- private void simulateClick(View view, float x, float y) {long downTime SystemClock.uptimeMillis();final MotionEvent downEvent MotionEve…...
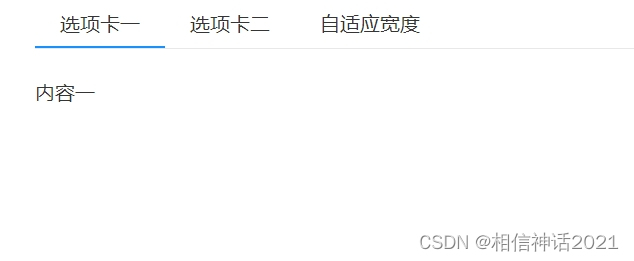
css自学框架之选项卡
这一节我们学习切换选项卡,两种切换方式,一种是单击切换选项,一种是鼠标滑动切换,通过参数来控制,切换方法。 一、参数 属性默认值描述tabBar.myth-tab-header span鼠标触发区域tabCon.myth-tab-content主体区域cla…...

Element Plus组件库中的input组件如何点击查看按钮时不可编辑,点击编辑时可编辑使用setup
如果你正在使用 Vue 3 和 Composition API,你可以使用 setup 函数来实现 Element Plus 的 Input 组件在点击查看按钮时不可编辑,点击编辑按钮时可编辑的功能。 以下是一个使用 setup 的示例代码: <template><div><el-input …...

小米、华为、iPhone、OPPO、vivo如何在手机让几张图拼成一张?
现在很多手机自带的相册APP已经有这个拼图功能了。 华为手机的拼图 打开图库,选定需要拼图的几张图片后,点击底部的【创作】,然后选择【拼图】就可以将多张图片按照自己想要的位置,组合在一起。 OPPO手机的拼图 打开相册&#…...

物联网AI MicroPython传感器学习 之 WS2812 RGB点阵灯环
学物联网,来万物简单IoT物联网!! 一、产品简介 ws2812是一个集控制电路与发光电路于一体的智能外控LED光源。其外型与一个5050LED灯珠相同,每个元件即为一个像素点。像素点内部包含了智能数字接口数据锁存信号整形放大驱动电路&a…...

【GPU常见概念】GPU常见概念及分类简述
随着大模型和人工智能的爆火,大家对GPU的关注持续上升,本文简单简述下GPU经常用的概念。 GPU(图形处理器),又称显示核心、视觉处理器、显示芯片,是一种专门在个人电脑、工作站、游戏机和一些移动设备&…...
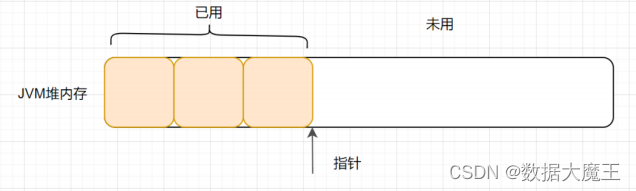
JVM篇---第九篇
系列文章目录 文章目录 系列文章目录一、什么是指针碰撞?二、什么是空闲列表三、什么是TLAB? 一、什么是指针碰撞? 一般情况下,JVM的对象都放在堆内存中(发生逃逸分析除外)。当类加载检查通过后࿰…...

探索 GAN 和 VAE 之外的 NLP 扩散模型
介绍 扩散模型最近引起了极大的关注,特别是在自然语言处理(NLP)领域。基于通过数据扩散噪声的概念,这些模型在各种NLP任务中表现出了卓越的能力。在本文中,我们将深入研究扩散模型,了解其基本原理,并探讨实际应用、优势、计算注意事项、扩散模型在多模态数据处理中的相…...
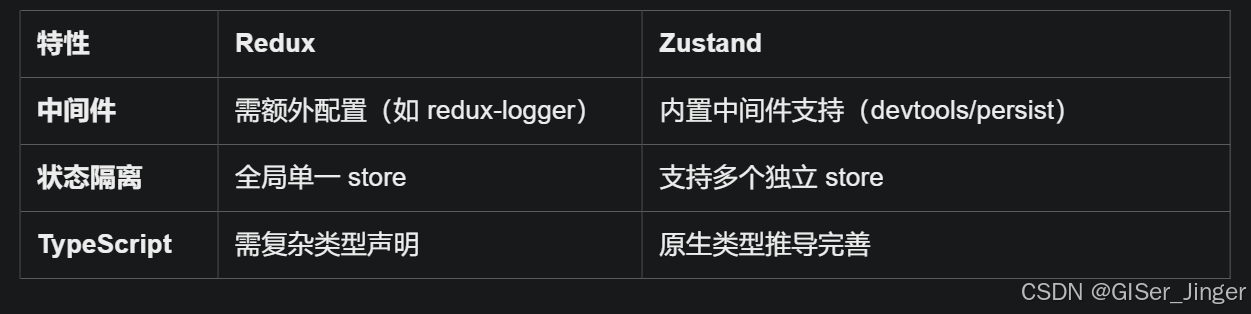
Zustand 状态管理库:极简而强大的解决方案
Zustand 是一个轻量级、快速和可扩展的状态管理库,特别适合 React 应用。它以简洁的 API 和高效的性能解决了 Redux 等状态管理方案中的繁琐问题。 核心优势对比 基本使用指南 1. 创建 Store // store.js import create from zustandconst useStore create((set)…...

多场景 OkHttpClient 管理器 - Android 网络通信解决方案
下面是一个完整的 Android 实现,展示如何创建和管理多个 OkHttpClient 实例,分别用于长连接、普通 HTTP 请求和文件下载场景。 <?xml version"1.0" encoding"utf-8"?> <LinearLayout xmlns:android"http://schemas…...

土地利用/土地覆盖遥感解译与基于CLUE模型未来变化情景预测;从基础到高级,涵盖ArcGIS数据处理、ENVI遥感解译与CLUE模型情景模拟等
🔍 土地利用/土地覆盖数据是生态、环境和气象等诸多领域模型的关键输入参数。通过遥感影像解译技术,可以精准获取历史或当前任何一个区域的土地利用/土地覆盖情况。这些数据不仅能够用于评估区域生态环境的变化趋势,还能有效评价重大生态工程…...

MySQL JOIN 表过多的优化思路
当 MySQL 查询涉及大量表 JOIN 时,性能会显著下降。以下是优化思路和简易实现方法: 一、核心优化思路 减少 JOIN 数量 数据冗余:添加必要的冗余字段(如订单表直接存储用户名)合并表:将频繁关联的小表合并成…...

jmeter聚合报告中参数详解
sample、average、min、max、90%line、95%line,99%line、Error错误率、吞吐量Thoughput、KB/sec每秒传输的数据量 sample(样本数) 表示测试中发送的请求数量,即测试执行了多少次请求。 单位,以个或者次数表示。 示例:…...

掌握 HTTP 请求:理解 cURL GET 语法
cURL 是一个强大的命令行工具,用于发送 HTTP 请求和与 Web 服务器交互。在 Web 开发和测试中,cURL 经常用于发送 GET 请求来获取服务器资源。本文将详细介绍 cURL GET 请求的语法和使用方法。 一、cURL 基本概念 cURL 是 "Client URL" 的缩写…...

前端开发者常用网站
Can I use网站:一个查询网页技术兼容性的网站 一个查询网页技术兼容性的网站Can I use:Can I use... Support tables for HTML5, CSS3, etc (查询浏览器对HTML5的支持情况) 权威网站:MDN JavaScript权威网站:JavaScript | MDN...

Vue3中的computer和watch
computed的写法 在页面中 <div>{{ calcNumber }}</div>script中 写法1 常用 import { computed, ref } from vue; let price ref(100);const priceAdd () > { //函数方法 price 1price.value ; }//计算属性 let calcNumber computed(() > {return ${p…...

【实施指南】Android客户端HTTPS双向认证实施指南
🔐 一、所需准备材料 证书文件(6类核心文件) 类型 格式 作用 Android端要求 CA根证书 .crt/.pem 验证服务器/客户端证书合法性 需预置到Android信任库 服务器证书 .crt 服务器身份证明 客户端需持有以验证服务器 客户端证书 .crt 客户端身份…...
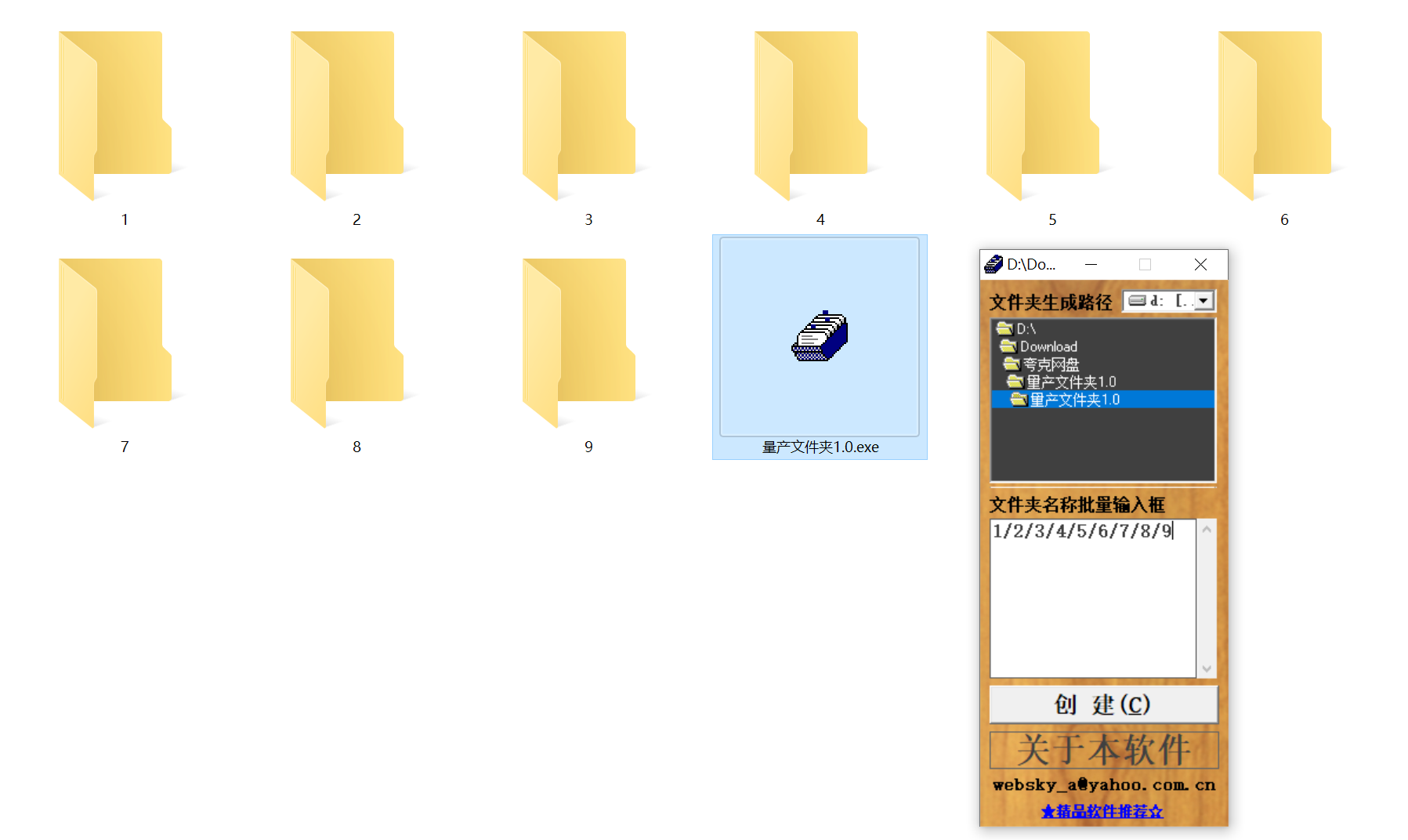
结构化文件管理实战:实现目录自动创建与归类
手动操作容易因疲劳或疏忽导致命名错误、路径混乱等问题,进而引发后续程序异常。使用工具进行标准化操作,能有效降低出错概率。 需要快速整理大量文件的技术用户而言,这款工具提供了一种轻便高效的解决方案。程序体积仅有 156KB,…...