计算机竞赛 车道线检测(自动驾驶 机器视觉)
0 前言
无人驾驶技术是机器学习为主的一门前沿领域,在无人驾驶领域中机器学习的各种算法随处可见,今天学长给大家介绍无人驾驶技术中的车道线检测。
1 车道线检测
在无人驾驶领域每一个任务都是相当复杂,看上去无从下手。那么面对这样极其复杂问题,我们解决问题方式从先尝试简化问题,然后由简入难一步一步尝试来一个一个地解决问题。车道线检测在无人驾驶中应该算是比较简单的任务,依赖计算机视觉一些相关技术,通过读取
camera 传入的图像数据进行分析,识别出车道线位置,我想这个对于 lidar
可能是无能为力。所以今天我们就从最简单任务说起,看看有哪些技术可以帮助我们检出车道线。
我们先把问题简化,所谓简化问题就是用一些条件限制来缩小车道线检测的问题。我们先看数据,也就是输入算法是车辆行驶的图像,输出车道线位置。
更多时候我们如何处理一件比较困难任务,可能有时候我们拿到任务时还没有任何思路,不要着急也不用想太多,我们先开始一步一步地做,从最简单的开始做起,随着做就会有思路,同样一些问题也会暴露出来。我们先找一段视频,这段视频是我从网上一个关于车道线检测项目中拿到的,也参考他的思路来做这件事。好现在就开始做这件事,那么最简单的事就是先读取视频,然后将其显示在屏幕以便于调试。
2 目标
检测图像中车道线位置,将车道线信息提供路径规划。
3 检测思路
- 图像灰度处理
- 图像高斯平滑处理
- canny 边缘检测
- 区域 Mask
- 霍夫变换
- 绘制车道线
4 代码实现
4.1 视频图像加载
import cv2
import numpy as np
import sys
import pygamefrom pygame.locals import *class Display(object):def __init__(self,Width,Height):pygame.init()pygame.display.set_caption('Drive Video')self.screen = pygame.display.set_mode((Width,Height),0,32)def paint(self,draw):self.screen.fill([0,0,0])draw = cv2.transpose(draw)draw = pygame.surfarray.make_surface(draw)self.screen.blit(draw,(0,0))pygame.display.update()
if __name__ == "__main__":
solid_white_right_video_path = "test_videos/丹成学长车道线检测.mp4"
cap = cv2.VideoCapture(solid_white_right_video_path)
Width = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
Height = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
display = Display(Width,Height)while True:ret, draw = cap.read()draw = cv2.cvtColor(draw,cv2.COLOR_BGR2RGB)if ret == False:breakdisplay.paint(draw)for event in pygame.event.get():if event.type == QUIT:sys.exit()上面代码学长就不多说了,默认大家对 python 是有所了解,关于如何使用 opencv 读取图片网上代码示例也很多,大家一看就懂。这里因为我用的是 mac
有时候显示视频图像可能会有些问题,所以我们用 pygame 来显示 opencv 读取图像。这个大家根据自己实际情况而定吧。值得说一句的是 opencv
读取图像是 BGR 格式,要想在 pygame 中正确显示图像就需要将 BGR 转换为 RGB 格式。
4.2 车道线区域
现在这个区域是我们根据观测图像绘制出来,

def color_select(img,red_threshold=200,green_threshold=200,blue_threshold=200):ysize,xsize = img.shape[:2]color_select = np.copy(img)rgb_threshold = [red_threshold, green_threshold, blue_threshold]thresholds = (img[:,:,0] < rgb_threshold[0]) \| (img[:,:,1] < rgb_threshold[1]) \| (img[:,:,2] < rgb_threshold[2])color_select[thresholds] = [0,0,0]return color_select效果如下:

4.3 区域
我们要检测车道线位置相对比较固定,通常出现车的前方,所以我们通过绘制,也就是仅检测我们关心区域。通过创建 mask 来过滤掉那些不关心的区域保留关心区域。
4.4 canny 边缘检测
有关边缘检测也是计算机视觉。首先利用梯度变化来检测图像中的边,如何识别图像的梯度变化呢,答案是卷积核。卷积核是就是不连续的像素上找到梯度变化较大位置。我们知道
sobal 核可以很好检测边缘,那么 canny 就是 sobal 核检测上进行优化。
# 示例代码,作者丹成学长:Q746876041
def canny_edge_detect(img):
gray = cv2.cvtColor(img,cv2.COLOR_RGB2GRAY)
kernel_size = 5
blur_gray = cv2.GaussianBlur(gray,(kernel_size, kernel_size),0)
low_threshold = 180high_threshold = 240edges = cv2.Canny(blur_gray, low_threshold, high_threshold)return edges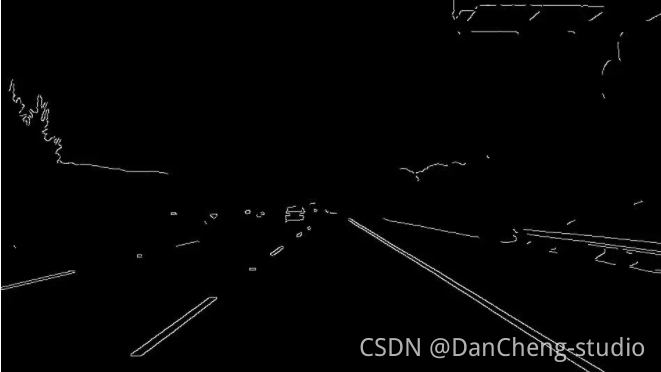
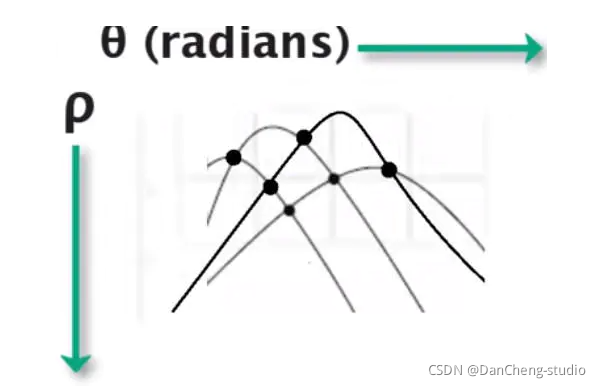
4.5 霍夫变换(Hough transform)
霍夫变换是将 x 和 y 坐标系中的线映射表示在霍夫空间的点(m,b)。所以霍夫变换实际上一种由繁到简(类似降维)的操作。当使用 canny
进行边缘检测后图像可以交给霍夫变换进行简单图形(线、圆)等的识别。这里用霍夫变换在 canny 边缘检测结果中寻找直线。
ignore_mask_color = 255 # 获取图片尺寸imshape = img.shape# 定义 mask 顶点vertices = np.array([[(0,imshape[0]),(450, 290), (490, 290), (imshape[1],imshape[0])]], dtype=np.int32)# 使用 fillpoly 来绘制 maskcv2.fillPoly(mask, vertices, ignore_mask_color)masked_edges = cv2.bitwise_and(edges, mask)# 定义Hough 变换的参数rho = 1 theta = np.pi/180threshold = 2min_line_length = 4 # 组成一条线的最小像素数max_line_gap = 5 # 可连接线段之间的最大像素间距# 创建一个用于绘制车道线的图片line_image = np.copy(img)*0 # 对于 canny 边缘检测结果应用 Hough 变换# 输出“线”是一个数组,其中包含检测到的线段的端点lines = cv2.HoughLinesP(masked_edges, rho, theta, threshold, np.array([]),min_line_length, max_line_gap)# 遍历“线”的数组来在 line_image 上绘制for line in lines:for x1,y1,x2,y2 in line:cv2.line(line_image,(x1,y1),(x2,y2),(255,0,0),10)color_edges = np.dstack((edges, edges, edges)) import mathimport cv2import numpy as np"""Gray ScaleGaussian SmoothingCanny Edge DetectionRegion MaskingHough TransformDraw Lines [Mark Lane Lines with different Color]"""class SimpleLaneLineDetector(object):def __init__(self):passdef detect(self,img):# 图像灰度处理gray_img = self.grayscale(img)print(gray_img)#图像高斯平滑处理smoothed_img = self.gaussian_blur(img = gray_img, kernel_size = 5)#canny 边缘检测canny_img = self.canny(img = smoothed_img, low_threshold = 180, high_threshold = 240)#区域 Maskmasked_img = self.region_of_interest(img = canny_img, vertices = self.get_vertices(img))#霍夫变换houghed_lines = self.hough_lines(img = masked_img, rho = 1, theta = np.pi/180, threshold = 20, min_line_len = 20, max_line_gap = 180)# 绘制车道线output = self.weighted_img(img = houghed_lines, initial_img = img, alpha=0.8, beta=1., gamma=0.)return outputdef grayscale(self,img):return cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)def canny(self,img, low_threshold, high_threshold):return cv2.Canny(img, low_threshold, high_threshold)def gaussian_blur(self,img, kernel_size):return cv2.GaussianBlur(img, (kernel_size, kernel_size), 0)def region_of_interest(self,img, vertices):mask = np.zeros_like(img) if len(img.shape) > 2:channel_count = img.shape[2] ignore_mask_color = (255,) * channel_countelse:ignore_mask_color = 255cv2.fillPoly(mask, vertices, ignore_mask_color)masked_image = cv2.bitwise_and(img, mask)return masked_imagedef draw_lines(self,img, lines, color=[255, 0, 0], thickness=10):for line in lines:for x1,y1,x2,y2 in line:cv2.line(img, (x1, y1), (x2, y2), color, thickness)def slope_lines(self,image,lines):img = image.copy()poly_vertices = []order = [0,1,3,2]left_lines = [] right_lines = [] for line in lines:for x1,y1,x2,y2 in line:if x1 == x2:pass else:m = (y2 - y1) / (x2 - x1)c = y1 - m * x1if m < 0:left_lines.append((m,c))elif m >= 0:right_lines.append((m,c))left_line = np.mean(left_lines, axis=0)right_line = np.mean(right_lines, axis=0)
for slope, intercept in [left_line, right_line]:
rows, cols = image.shape[:2]y1= int(rows) y2= int(rows*0.6)x1=int((y1-intercept)/slope)x2=int((y2-intercept)/slope)poly_vertices.append((x1, y1))poly_vertices.append((x2, y2))self.draw_lines(img, np.array([[[x1,y1,x2,y2]]]))poly_vertices = [poly_vertices[i] for i in order]cv2.fillPoly(img, pts = np.array([poly_vertices],'int32'), color = (0,255,0))return cv2.addWeighted(image,0.7,img,0.4,0.)def hough_lines(self,img, rho, theta, threshold, min_line_len, max_line_gap):lines = cv2.HoughLinesP(img, rho, theta, threshold, np.array([]), minLineLength=min_line_len, maxLineGap=max_line_gap)line_img = np.zeros((img.shape[0], img.shape[1], 3), dtype=np.uint8)line_img = self.slope_lines(line_img,lines)return line_imgdef weighted_img(self,img, initial_img, alpha=0.1, beta=1., gamma=0.):lines_edges = cv2.addWeighted(initial_img, alpha, img, beta, gamma)return lines_edgesdef get_vertices(self,image):rows, cols = image.shape[:2]bottom_left = [cols*0.15, rows]top_left = [cols*0.45, rows*0.6]bottom_right = [cols*0.95, rows]top_right = [cols*0.55, rows*0.6] ver = np.array([[bottom_left, top_left, top_right, bottom_right]], dtype=np.int32)return ver
4.6 HoughLinesP 检测原理
接下来进入代码环节,学长详细给大家解释一下 HoughLinesP 参数的含义以及如何使用。
lines = cv2.HoughLinesP(cropped_image,2,np.pi/180,100,np.array([]),minLineLength=40,maxLineGap=5)
- 第一参数是我们要检查的图片 Hough accumulator 数组
- 第二个和第三个参数用于定义我们 Hough 坐标如何划分 bin,也就是小格的精度。我们通过曲线穿过 bin 格子来进行投票,我们根据投票数量来决定 p 和 theta 的值。2 表示我们小格宽度以像素为单位 。
我们可以通过下图划分小格,只要曲线穿过就会对小格进行投票,我们记录投票数量,记录最多的作为参数
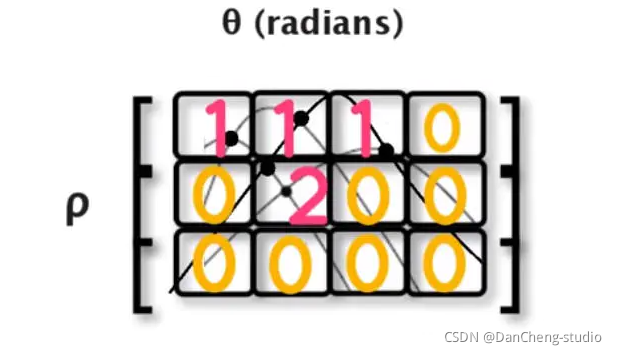
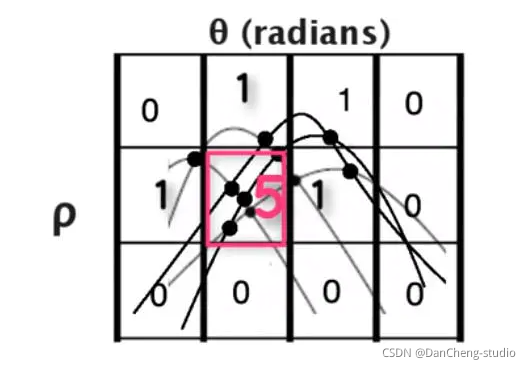
- 如果定义尺寸过大也就失去精度,如果定义格子尺寸过小虽然精度上来了,这样也会打来增长计算时间。
- 接下来参数 100 表示我们投票为 100 以上的线才是符合要求是我们要找的线。也就是在 bin 小格子需要有 100 以上线相交于此才是我们要找的参数。
- minLineLength 给 40 表示我们检查线长度不能小于 40 pixel
- maxLineGap=5 作为线间断不能大于 5 pixel
4.6.1 定义显示车道线方法
def disply_lines(image,lines):
pass
通过定义函数将找到的车道线显示出来。
line_image = disply_lines(lane_image,lines)
4.6.2 查看探测车道线数据结构
def disply_lines(image,lines):
line_image = np.zeros_like(image)
if lines is not None:
for line in lines:
print(line)
先定义一个尺寸大小和原图一样的矩阵用于绘制查找到车道线,我们先判断一下是否已经找到车道线,lines 返回值应该不为 None
是一个矩阵,我们可以简单地打印一下看一下效果
[[704 418 927 641]]
[[704 426 791 516]]
[[320 703 445 494]]
[[585 301 663 381]]
[[630 341 670 383]]
4.6.3 探测车道线
看数据结构[[x1,y1,x2,y2]] 的二维数组,这就需要我们转换一下为一维数据[x1,y1,x2,y2]
def disply_lines(image,lines):
line_image = np.zeros_like(image)
if liness is not None:
for line in lines:
x1,y1,x2,y2 = line.reshape(4)
cv2.line(line_image,(x1,y1),(x2,y2),(255,0,0),10)
return line_image
line_image = disply_lines(lane_image,lines)
cv2.imshow('result',line_image)
4.6.4 合成
有关合成图片我们是将两张图片通过给一定权重进行叠加合成。

4.6.5 优化

探测到的车道线还是不够平滑,我们需要优化,基本思路就是对这些直线的斜率和截距取平均值然后将所有探测出点绘制到一条直线上。
def average_slope_intercept(image,lines):left_fit = []right_fit = []for line in lines:x1, y1, x2, y2 = line.reshape(4)parameters = np.polyfit((x1,x2),(y1,y2),1)print(parameters)
这里学长定义两个数组 left_fit 和 right_fit 分别用于存放左右两侧车道线的点,我们打印一下 lines 的斜率和截距,通过 numpy
提供 polyfit 方法输入两个点我们就可以得到通过这些点的直线的斜率和截距。
[ 1. -286.]
[ 1.03448276 -302.27586207]
[ -1.672 1238.04 ]
[ 1.02564103 -299.
[ 1.02564103 -299.
def average_slope_intercept(image,lines):left_fit = []right_fit = []for line in lines:x1, y1, x2, y2 = line.reshape(4)parameters = np.polyfit((x1,x2),(y1,y2),1)# print(parameters)slope = parameters[0]intercept = parameters[1]if slope < 0:left_fit.append((slope,intercept))else:right_fit.append((slope,intercept))print(left_fit)print(right_fit)
我们输出一下图片大小,我们图片是以其左上角作为原点 0 ,0 来开始计算的,所以我们直线从图片底部 700 多向上绘制我们无需绘制全部可以截距一部分即可。
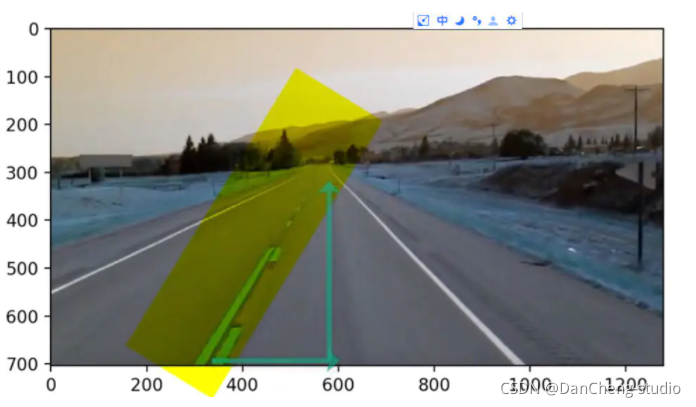
def make_coordinates(image, line_parameters):slope, intercept = line_parametersy1 = image.shape[0]y2 = int(y1*(3/5)) x1 = int((y1 - intercept)/slope)x2 = int((y2 - intercept)/slope)# print(image.shape)return np.array([x1,y1,x2,y2])
所以直线开始和终止我们给定 y1,y2 然后通过方程的斜率和截距根据y 算出 x。
averaged_lines = average_slope_intercept(lane_image,lines);
line_image = disply_lines(lane_image,averaged_lines)
combo_image = cv2.addWeighted(lane_image,0.8, line_image, 1, 1,1)
cv2.imshow('result',combo_image)

5 最后
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
计算机竞赛 车道线检测(自动驾驶 机器视觉)
0 前言 无人驾驶技术是机器学习为主的一门前沿领域,在无人驾驶领域中机器学习的各种算法随处可见,今天学长给大家介绍无人驾驶技术中的车道线检测。 1 车道线检测 在无人驾驶领域每一个任务都是相当复杂,看上去无从下手。那么面对这样极其…...

Java代理简介
代理简介 Java中的代理是一种设计模式,它允许一个对象(代理对象)代表另一个对象(真实对象)来控制对真实对象的访问。代理对象通常拥有与真实对象相同的接口,这使得客户端可以通过代理来访问真实对象&#…...

rust元组
一、元组定义 (一)语法 let tuple_name: (data_type1, data_type2, data_type3) (value1, value2, value3);可以不显式指定类型 let tuple_name (value1,value2,value3);使用一对小括号 () 把所有元素放在一起,元素之间使用逗号 , 分隔。…...
HTTPS工作过程,国家为什么让http为什么要换成https,Tomcat在MAC M1电脑如何安装,Tomcat的详细介绍
目录 引言 一、HTTPS工作过程 二、Tomcat 在访达中找到下载好的Tomcat文件夹(这个要求按顺序) zsh: permission denied TOMCAT的各部分含义: 引言 在密码中一般是:明文密钥->密文(加密) ÿ…...

第十课 贪心
文章目录 第十课 贪心lc 322.零钱兑换--中等题目描述代码展示 lc860.柠檬水找零--简单题目描述代码展示 lc455.分发饼干--简单题目描述代码展示 lc122.买卖股票的最佳时机II--中等题目描述代码展示 lc45.跳跃游戏II--中等题目描述代码展示 lc1665.完成所有任务的最少初始能量--…...
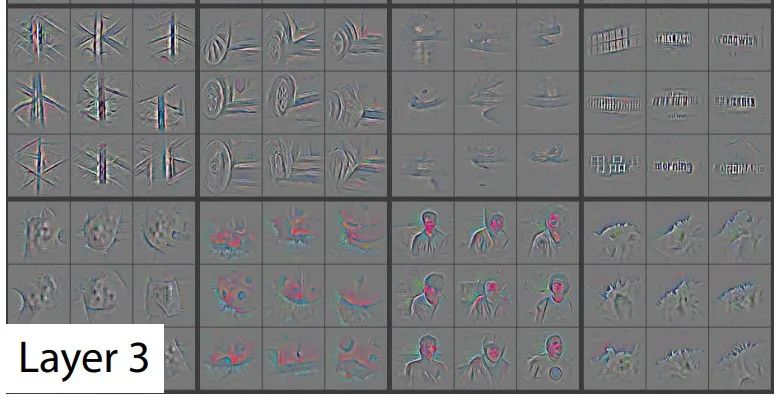
5分钟理解什么是卷积的特征提取
大家好啊,我是董董灿。 卷积算法之所以重要,关键在于其提取特征的能力。 5分钟入门卷积算法中提到,卷积模仿的就是人眼识图的过程,以“感受野”的视角去扫描图片,从而获取不同区域的图片信息。 在这一过程中&#x…...

Legion Y9000X IRH8 2023款(82Y3)原装出厂OEM预装Windows11系统
lenovo联想电脑笔记本拯救者原厂win11系统镜像 下载链接:https://pan.baidu.com/s/15G01j7ROVqOFOETccQSKHg?pwdt1ju 系统自带所有驱动、出厂主题壁纸、Office办公软件、联想电脑管家等预装程序 所需要工具:32G或以上的U盘 文件格式:ISO…...
【Acwing1010】拦截导弹(LIS+贪心)题解
题目描述 思路分析 本题有两问,第一问直接用lis的模板即可,下面重点看第二问 思路是贪心: 贪心流程: 从前往后扫描每一个数,对于每个数: 情况一:如果现有的子序列的结尾都小于当前的数&…...
DevicData-D-XXXXXXXX勒索病毒数据恢复|金蝶、用友、管家婆、OA、速达、ERP等软件数据库恢复
引言: 在数字时代,数据安全成为一项至关重要的挑战。DevicData-D-XXXXXXXX勒索病毒(以下简称DevicData病毒)是这场战斗中的新敌人,它能够以毁灭性的方式加密您的数据,迫使您在数据和时间之间做出艰难的选择…...

从入门到精通,30天带你学会C++【第七天:for循环和while循环以及数组的学习】(学不会你找我)
目录 Everyday English 前言 数组 数组的概念 数组的定义 数组的下标 for循环 循环是什么 基本格式 多重循环 while循环 do-while循环 总结 Everyday English To shine , not be illuminated. 去发光,而不是被照亮。 前言 好久不见,…...

Python 编程基础 | 第五章-类与对象 | 5.2、数据成员
一、数据成员 数据成员是指类中定义的变量,即属性,根据定义位置,又可以分为类属性和实例属性,下面分别进行介绍。 1、实例属性 实例属性是指定义在类的方法中的属性,该属性属于当前实例,例如:…...
PHP 个人愿望众筹网站系统mysql数据库web结构apache计算机软件工程网页wamp
一、源码特点 PHP 个人愿望众筹网站系统是一套完善的web设计系统,对理解php编程开发语言有帮助,系统具有完整的源代码和数据库,系统主要采用B/S模式开发。 php 个人愿望众筹网站 代码 https://download.csdn.net/download/qq_41221322/8…...
)
JS--判断空值(null、undefined、NaN、false、空字符串等)
原文网址:JS--判断空值(null、undefined、NaN、false、空字符串等)_IT利刃出鞘的博客-CSDN博客 简介 本文介绍JavaScript判断空值的方法。 空值包括:undefined,null,NaN,,false,{}࿰…...

ChatGPT 背后包含了哪些技术?
ChatGPT 是由OpenAI开发的一款基于GPT-3(Generative Pre-trained Transformer 3)的人工智能语言模型。这个模型是使用多种编程语言和技术组合编写的。 首先,ChatGPT 使用了 Python 作为主要的编程语言。Python 是一种流行的高级编程语言&…...
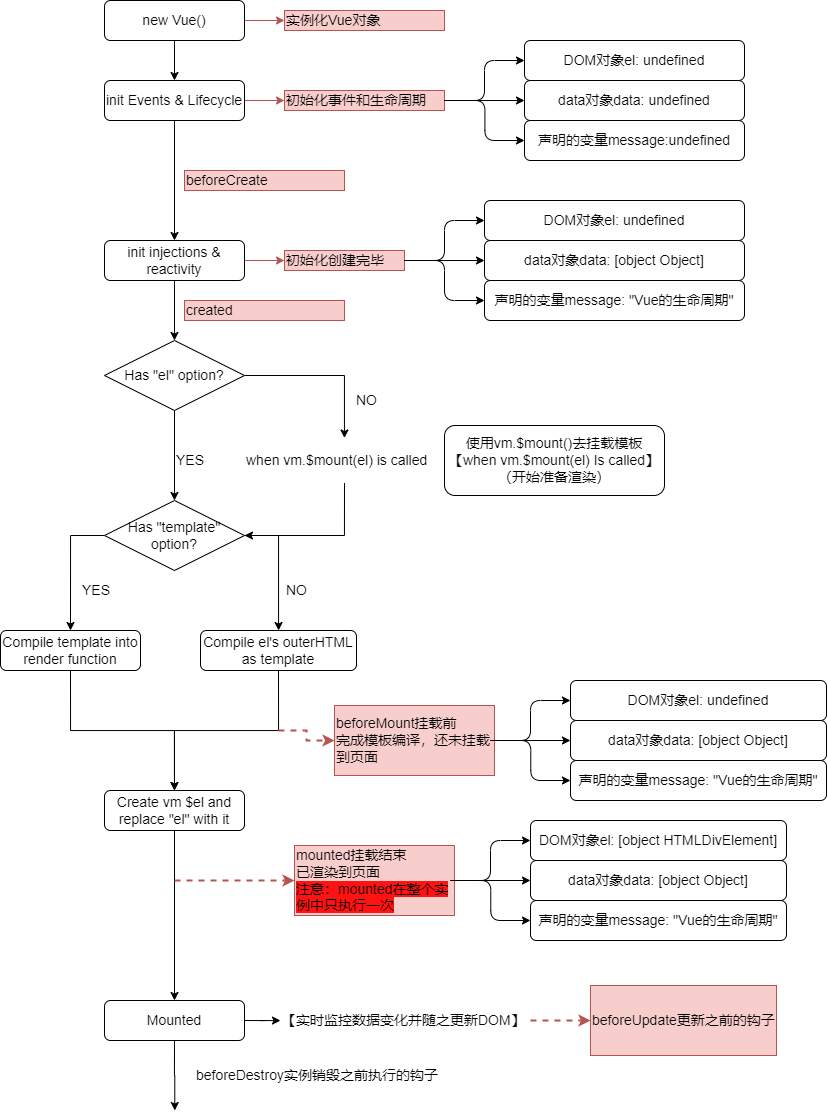
Vue Router(二)
目录 一、嵌套路由 1、路由定义 2、代码例子 3、重定向 二、懒加载 1、缘由 2、代码例子 三、导航守卫 1、全局前置守卫 2、全局后置守卫 3、meta元信息 四、生命周期 1、解释 2、执行顺序 3、例子 五、keep-alive组件缓存(保活) 1、介…...
ELK整合springboot(第二课)
一、创建一个springboot的项目 pom文件如下: <?xml version"1.0" encoding"UTF-8"?> <project xmlns"http://maven.apache.org/POM/4.0.0" xmlns:xsi"http://www.w3.org/2001/XMLSchema-instance"xsi:schemaLo…...

运维常见的22个故障排查和10个问题解决技巧大汇总!
作为运维,多多少少会碰见这样那样的问题或故障,从中总结经验,查找问题,汇总并分析故障的原因,这是一个运维工程师良好的习惯。每一次技术的突破,都经历着苦闷,伴随着快乐,可我们还是…...
解决 TensorFlow 2.x 中的 “AttributeError: module ‘tensorflow‘ has no attribute ‘placeholder‘“ 错误
项目场景: 在使用 TensorFlow 框架实现深度学习应用时,可能会遇到以下错误: AttributeError: module tensorflow has no attribute placeholder问题描述 在 TensorFlow 1.x 版本中,placeholder 函数用于创建占位符张量。然而&a…...

新风机注意事项有哪些?
选择和使用新风机时,有几个关键注意事项需要牢记: 安装位置:新风机的安装位置很重要。通常情况下,应将其安装在室外以避免室内产生噪音和减少室内的体积占据。确保选择合适的安装位置,以便新风机能够顺利引入新鲜空气。…...
GitHub基础
1、仓库是什么意思?仓库拥有者是谁? 在软件开发或版本控制系统中,"仓库"(Repository)是指存储项目代码、配置文件、文档等相关文件的地方。它可以看作是一个中央存储库,用于管理和跟踪项目的各个…...

web vue 项目 Docker化部署
Web 项目 Docker 化部署详细教程 目录 Web 项目 Docker 化部署概述Dockerfile 详解 构建阶段生产阶段 构建和运行 Docker 镜像 1. Web 项目 Docker 化部署概述 Docker 化部署的主要步骤分为以下几个阶段: 构建阶段(Build Stage):…...

Android Wi-Fi 连接失败日志分析
1. Android wifi 关键日志总结 (1) Wi-Fi 断开 (CTRL-EVENT-DISCONNECTED reason3) 日志相关部分: 06-05 10:48:40.987 943 943 I wpa_supplicant: wlan0: CTRL-EVENT-DISCONNECTED bssid44:9b:c1:57:a8:90 reason3 locally_generated1解析: CTR…...
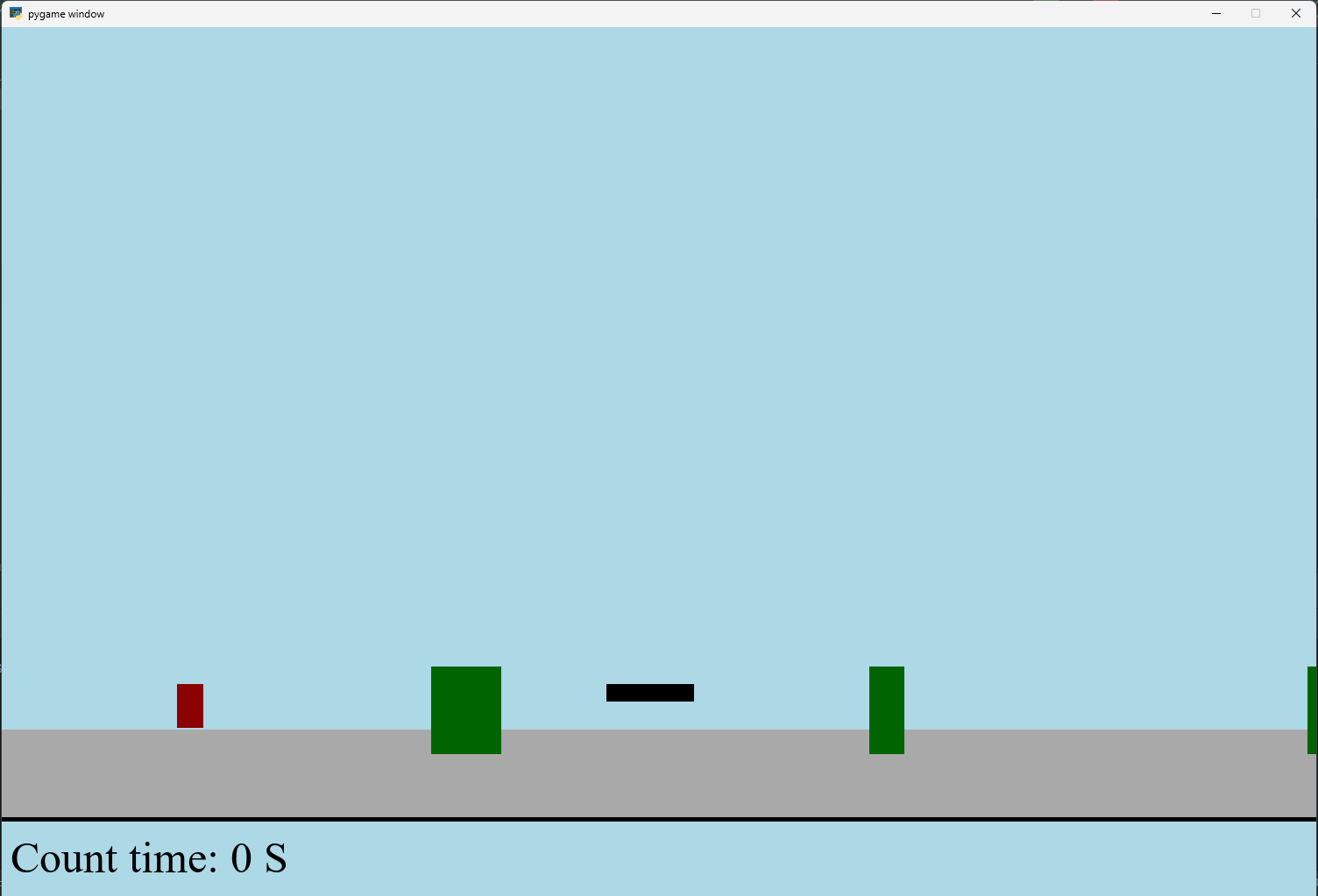
【Python】 -- 趣味代码 - 小恐龙游戏
文章目录 文章目录 00 小恐龙游戏程序设计框架代码结构和功能游戏流程总结01 小恐龙游戏程序设计02 百度网盘地址00 小恐龙游戏程序设计框架 这段代码是一个基于 Pygame 的简易跑酷游戏的完整实现,玩家控制一个角色(龙)躲避障碍物(仙人掌和乌鸦)。以下是代码的详细介绍:…...

day52 ResNet18 CBAM
在深度学习的旅程中,我们不断探索如何提升模型的性能。今天,我将分享我在 ResNet18 模型中插入 CBAM(Convolutional Block Attention Module)模块,并采用分阶段微调策略的实践过程。通过这个过程,我不仅提升…...
通过Wrangler CLI在worker中创建数据库和表
官方使用文档:Getting started Cloudflare D1 docs 创建数据库 在命令行中执行完成之后,会在本地和远程创建数据库: npx wranglerlatest d1 create prod-d1-tutorial 在cf中就可以看到数据库: 现在,您的Cloudfla…...
)
postgresql|数据库|只读用户的创建和删除(备忘)
CREATE USER read_only WITH PASSWORD 密码 -- 连接到xxx数据库 \c xxx -- 授予对xxx数据库的只读权限 GRANT CONNECT ON DATABASE xxx TO read_only; GRANT USAGE ON SCHEMA public TO read_only; GRANT SELECT ON ALL TABLES IN SCHEMA public TO read_only; GRANT EXECUTE O…...

【HTML-16】深入理解HTML中的块元素与行内元素
HTML元素根据其显示特性可以分为两大类:块元素(Block-level Elements)和行内元素(Inline Elements)。理解这两者的区别对于构建良好的网页布局至关重要。本文将全面解析这两种元素的特性、区别以及实际应用场景。 1. 块元素(Block-level Elements) 1.1 基本特性 …...

C# SqlSugar:依赖注入与仓储模式实践
C# SqlSugar:依赖注入与仓储模式实践 在 C# 的应用开发中,数据库操作是必不可少的环节。为了让数据访问层更加简洁、高效且易于维护,许多开发者会选择成熟的 ORM(对象关系映射)框架,SqlSugar 就是其中备受…...

【C++从零实现Json-Rpc框架】第六弹 —— 服务端模块划分
一、项目背景回顾 前五弹完成了Json-Rpc协议解析、请求处理、客户端调用等基础模块搭建。 本弹重点聚焦于服务端的模块划分与架构设计,提升代码结构的可维护性与扩展性。 二、服务端模块设计目标 高内聚低耦合:各模块职责清晰,便于独立开发…...

Swagger和OpenApi的前世今生
Swagger与OpenAPI的关系演进是API标准化进程中的重要篇章,二者共同塑造了现代RESTful API的开发范式。 本期就扒一扒其技术演进的关键节点与核心逻辑: 🔄 一、起源与初创期:Swagger的诞生(2010-2014) 核心…...