ur3+robotiq 2f 140配置moveit
ur3+robotiq 2f 140配置moveit
参考链接1
参考链接2
官方配置movit教程
搭建环境:
ubuntu: 20.04
ros: Nonetic
sensor: robotiq_ft300
gripper: robotiq_2f_140_gripper
UR: UR3
reasense: D435i
通过下面几篇博客配置好了ur3、力传感器、robotiq夹爪、realsense的rviz和gazebo仿真环境
ubuntu20.04配置UR机械臂的仿真环境
ur3+robotiq ft sensor+robotiq 2f 140配置rviz仿真环境
ur3+robotiq ft sensor+robotiq 2f 140配置gazebo仿真环境
ur3+robotiq ft sensor+robotiq 2f 140+realsense d435i配置rviz,gazebo仿真环境
gazebo仿真环境中添加robotiq 2f 140的gripper_controller控制器
下面来配置ur3机械臂和夹爪的moveit
运行命令
roslaunch moveit_setup_assistant setup_assistant.launch
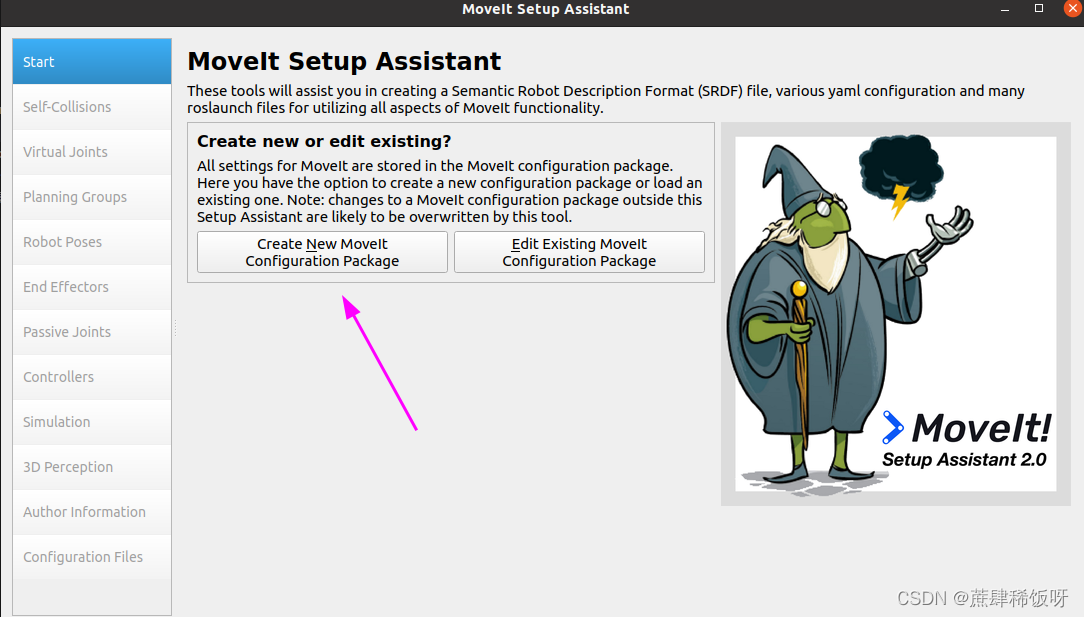
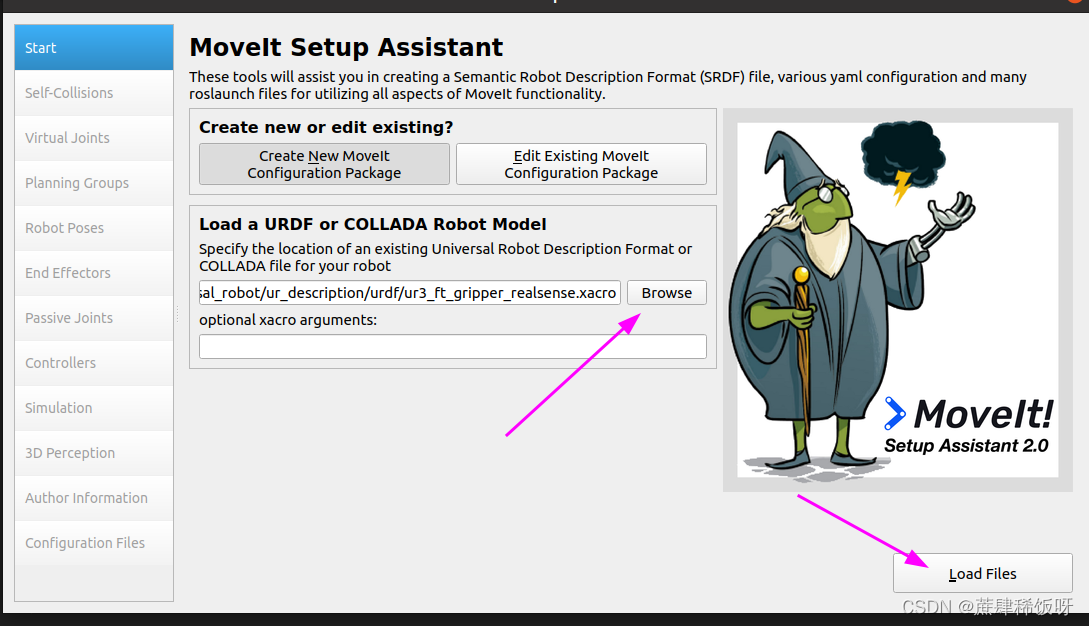
选择创建新的movit配置文件,导入之前配好的描述文件,我导入的是universal_robot/ur_description/urdf/ur3_ft_gripper_realsense.xacro
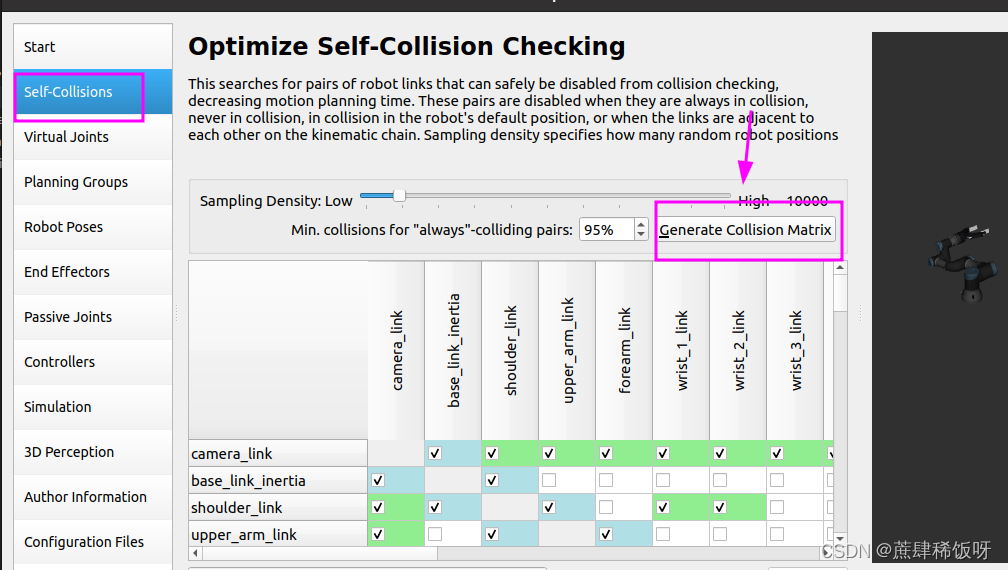
选择生成碰撞矩阵
配置虚拟关节
这里我没有配置虚拟关节,跳过
创建规划组
点击Add Group添加组
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-UJHGTzHQ-1677226598177)(https://cdn.jsdelivr.net/gh/FinnJob/blog-pic/img/20230224151358.png)]](https://img-blog.csdnimg.cn/6f46665a67b14b3eb3e9221dce0305e9.png)
- 添加ur3机械臂planning组,相关配置如下
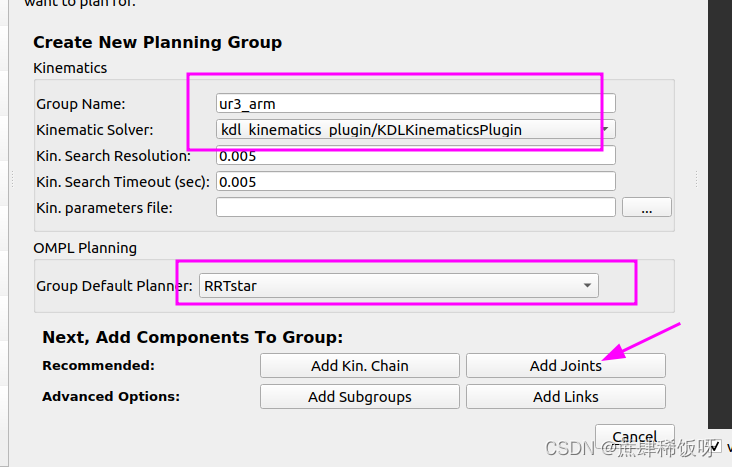
点击Add Joints,添加关节如下,添加完关节后选择chain后点击edit select
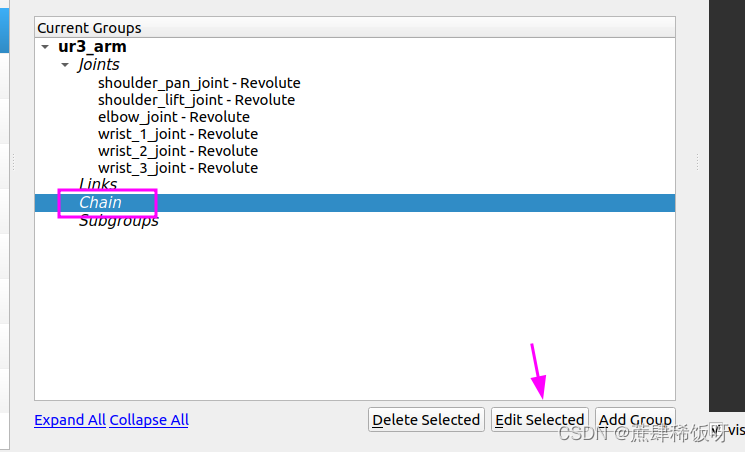
配置如下图
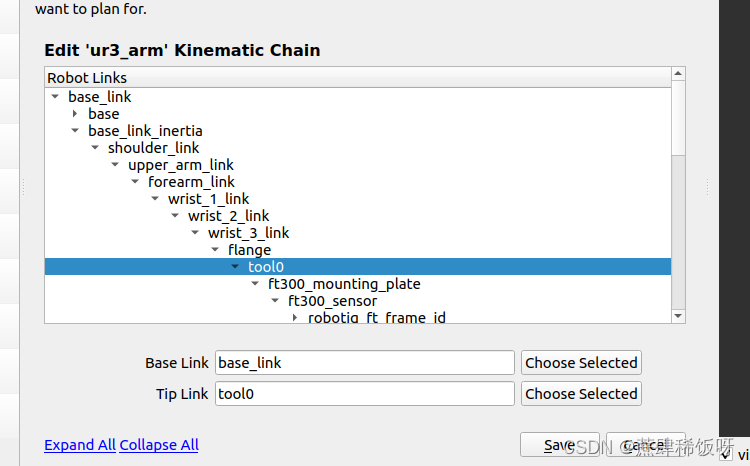
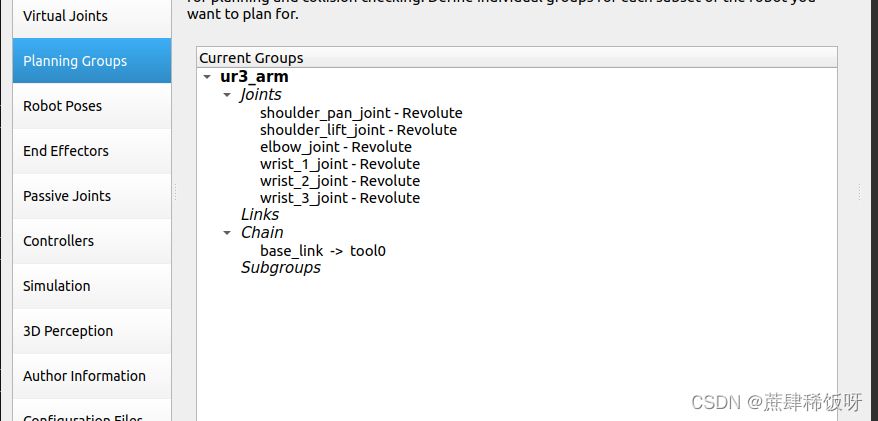
最终配置
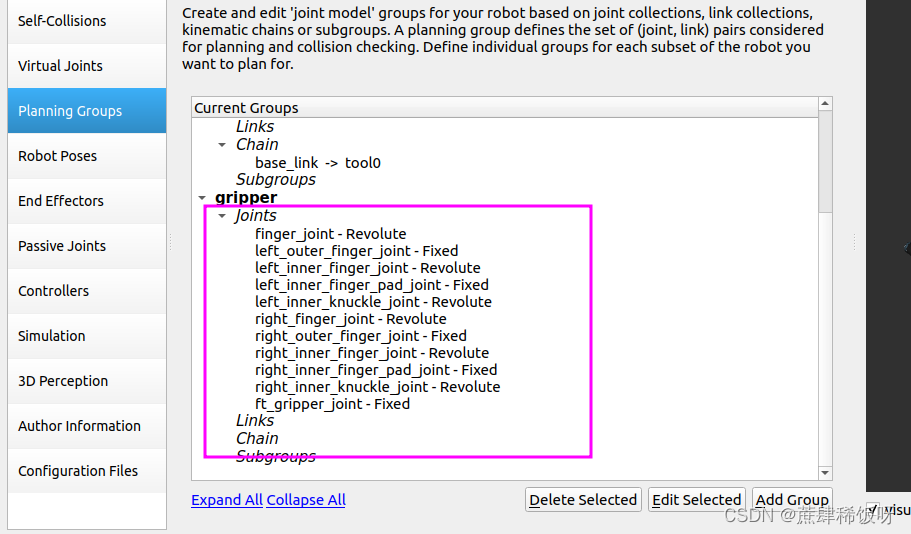
- 添加robotiq 2f 140夹爪planning组,相关配置如下
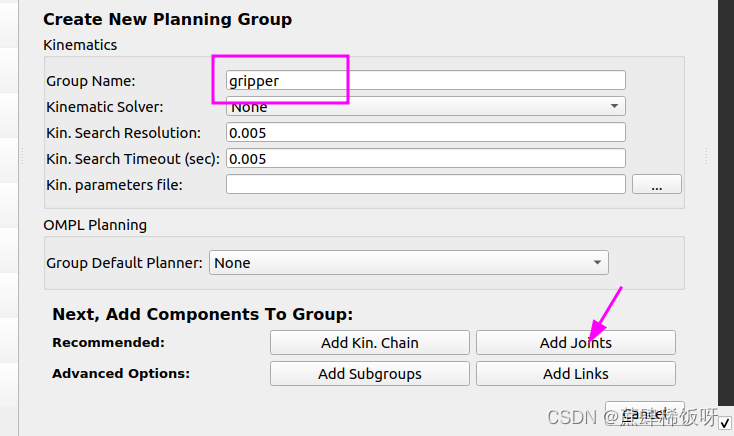
点击Add Joints,添加关节如下所示
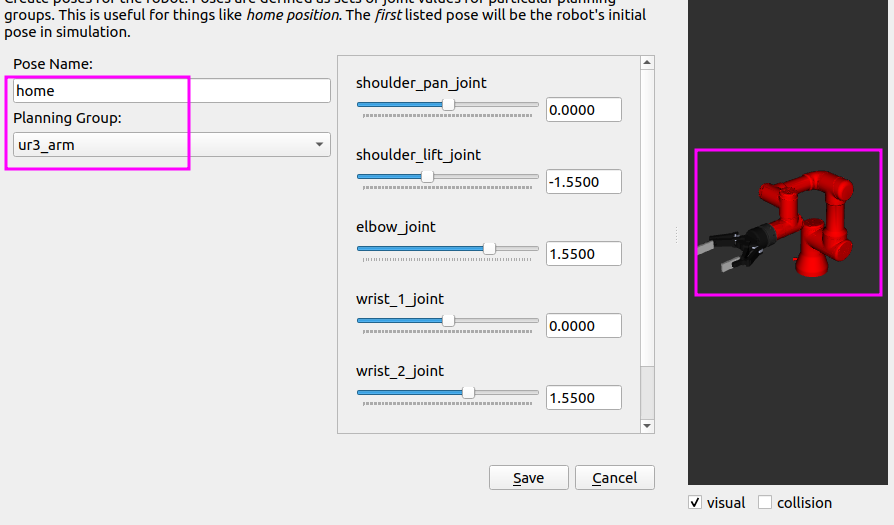
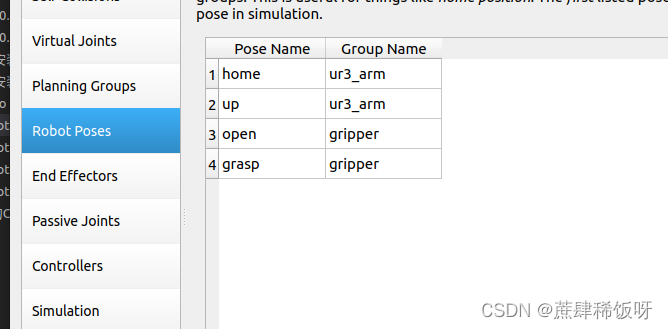
定义机器人位姿
- 设置home
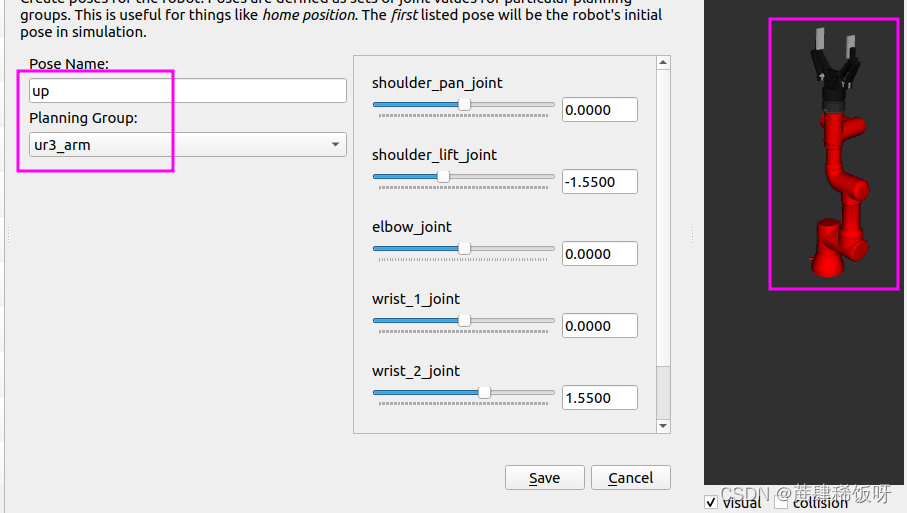
- 设置机械臂立起来up
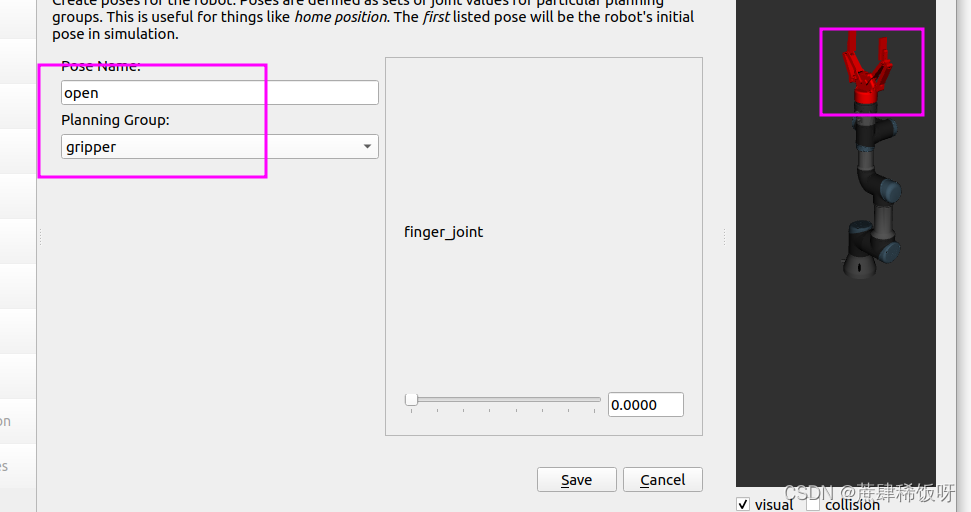
- 设置打开夹爪open
- 设置加紧夹爪grasp

最终save
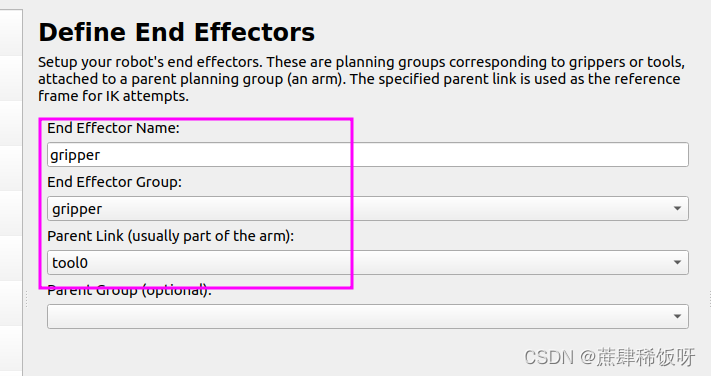
设置末端执行器
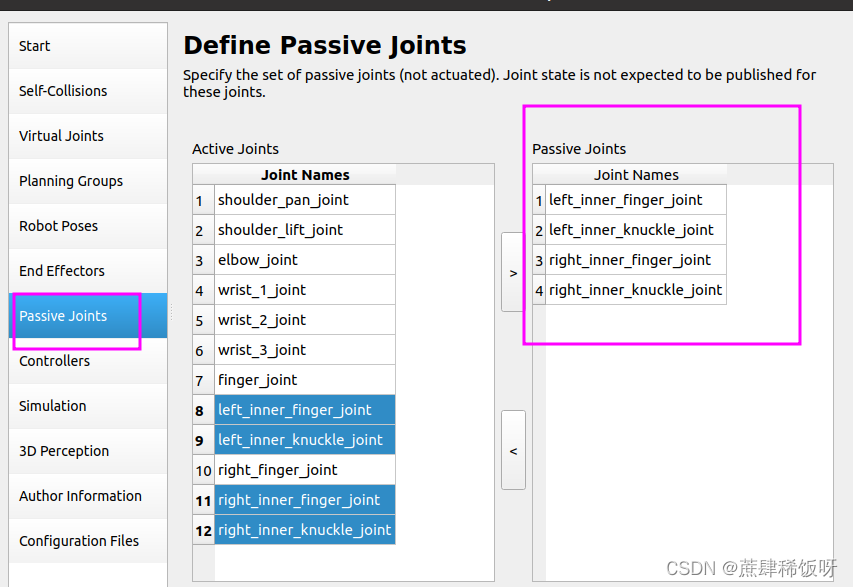
设置无用关节
也就是一些被动关节,没有驱动的那种,也不需要它发布joint_state。选择夹爪的一些被动关节
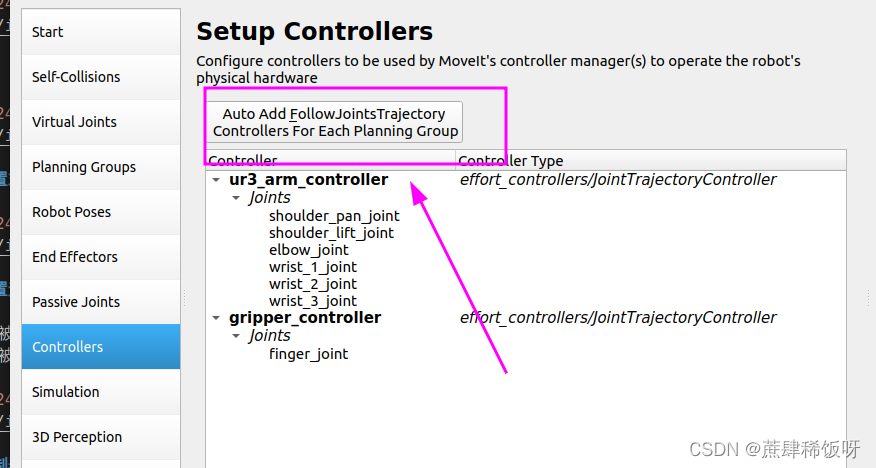
控制器设置
直接点左上角的自动生成,生成的是group名字加上controller
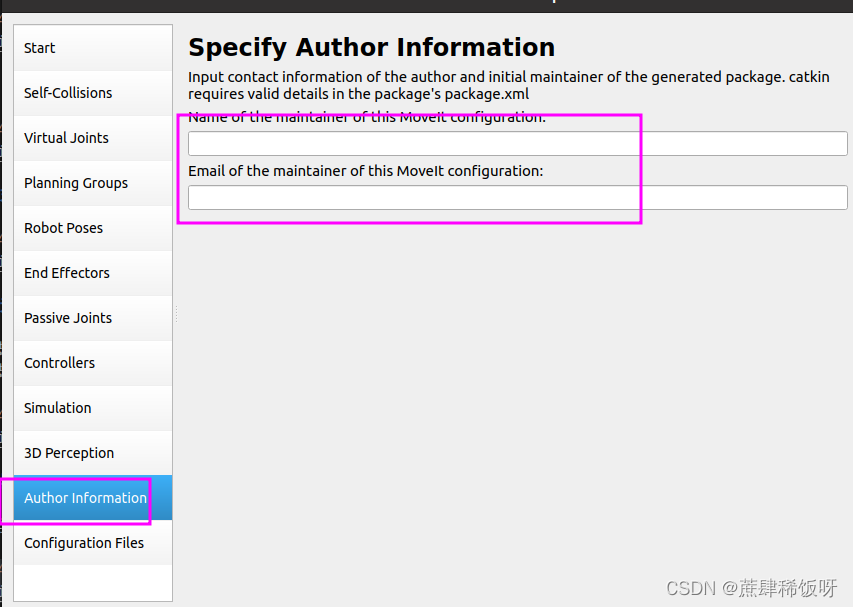
加上信息
可以随便写,每加上不给生成
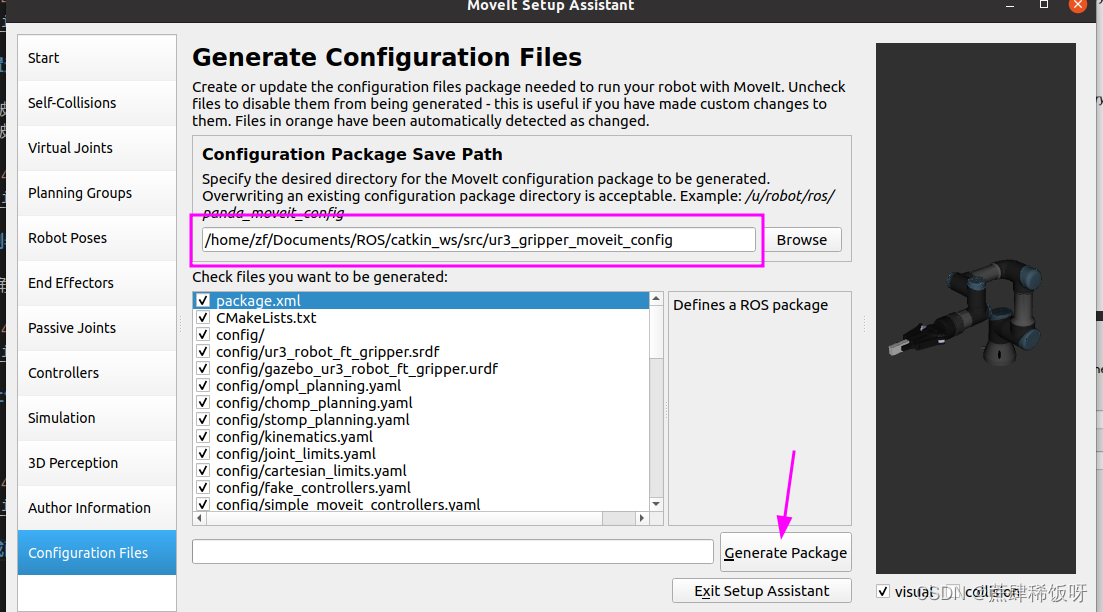
生成配置文件
选择存放配置文件的路径,点击生成
生成配置文件后,有许多地方是不对的,需要手动改一下bug
- bug1
Error [parser.cc:488] parse as old deprecated model file failed.
Error Code 4 Msg: Required attribute[filename] in element[plugin] is not specified in SDF.
Error Code 8 Msg: Error reading element <plugin>
Error Code 8 Msg: Error reading element <model>
Error Code 8 Msg: Error reading element <sdf>
解决办法:
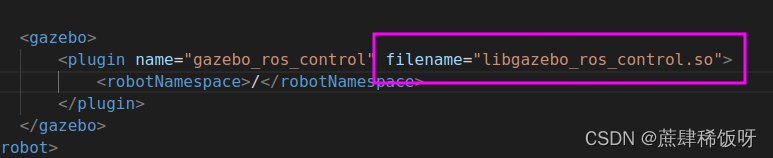
检查你的urdf模型文件的最后,看其是否少了 "filename=“libgazebo_ros_control.so” ,我就是少了这个而报错,可能是因为 gazebo_ros_control 这个plugin没有继承libgazebo_ros_control.so
我的这个urdf文件是生成的配置文件里面的ur3_gripper_moveit_config/config/gazebo_ur3_robot_ft_gripper.urdf,然后在里面加上,如下图
展示效果
- 展示rviz
运行命令
cd ~/catkin_ws
source devel/setup.bash
roslaunch ur3_gripper_moveit_config demo.launch
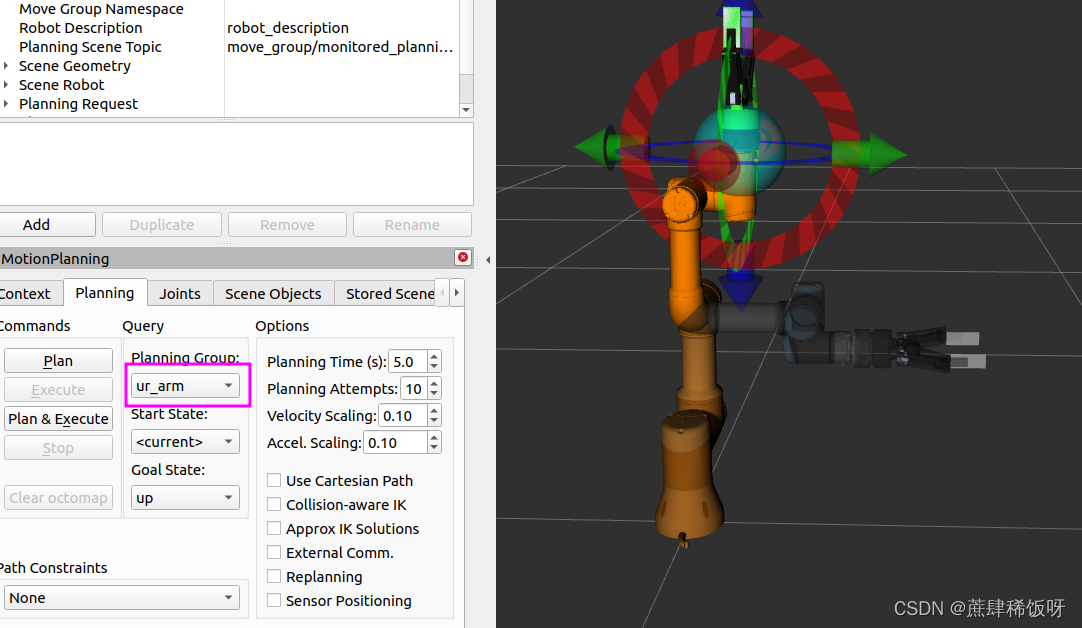
选择机械臂或者夹爪,可以在rviz中做路径规划
- 展示rviz和gazebo
运行命令
cd ~/catkin_ws
source devel/setup.bash
roslaunch ur3_gripper_moveit_config demo_gazebo.launch
可以看到机械臂在gazebo中一直在跳舞,原因未知
相关文章:
ur3+robotiq 2f 140配置moveit
ur3robotiq 2f 140配置moveit 参考链接1 参考链接2 官方配置movit教程 搭建环境: ubuntu: 20.04 ros: Nonetic sensor: robotiq_ft300 gripper: robotiq_2f_140_gripper UR: UR3 reasense: D435i 通过下面几篇博客配置好了ur3、力传感器、robotiq夹爪…...
LDO 芯片烫手,问题出在哪里?
设计失误的一个电路,该电路是数字电路的电源,为图方便对12V直接通过线性电源芯片降压到5V: 图1:线性电源降压12V转5V 几块电路板打样好后,测试均发现AMS1117-5.0芯片烫手,负载电流100mA多,也满…...

零日漏洞发展格局及防御策略
在过去的一年半中, 在野利用的零日漏洞数量持续飙升 ,这些软件制造商尚不知晓的漏洞正在被国家行为体黑客组织和勒索软件团伙滥用。 今年上半年,Google Project Zero统计了近20个零日漏洞,其中 大部分针对微软、苹果和谷歌构建的…...

RabbitMQ 可用磁盘空间报警
概要当磁盘可用空间低于设定的值(默认50M),将触发警报,并阻塞所有生产者。这目标是为了避免填满整个磁盘,这将导致所有节点上的写入操作失败,并可能导致RabbitMQ停止服务。如何工作为了减少磁盘被填满的风险…...

Web前端学习:二
二一:文字font-size样式 font-size:**px 控制文字大小,可精准控制大小 默认样式medium,中等的 large,大一号 x-large,再大一号 xx-large,再大一号 small,小一号 <!DOCTYPE html…...

【第一章 计算机网络体系结构,标准化工作相关组织,性能指标,分层结构,OSI参考模型】
第一章 计算机网络体系结构,标准化工作相关组织,性能指标,分层结构,OSI参考模型 1.计算机网络: (1)概念: ①计算机网络是将一个分散的、具有独立功能的计算机系统,通过通…...
SpringIOC源码解析
Spring深度学习(一)——IOC的设计理念Spring的核心思想——IOCSpring流程图DEMO编写Spring IoC容器的加载过程实例化化容器:AnnotationConfigApplicationContext实例化建BeanDefinition读取器: AnnotatedBeanDefinitionReaderBean…...
【Jupyter Notebook的简单入门使用】
【Jupyter Notebook的简单入门使用】简单介绍安装与配置简单使用Markdown关闭简单介绍 Jupyter官网 Jupyter Notebook 介绍 简单来讲,它是一个网页应用,可以进行文档编写,甚至运行 py 代码等功能 安装与配置 下载合适版本的 python &#…...

@Component@Import@Bean加载顺序解析
【前言】 我们在使用Spring注入Bean对象时,会使用不同注解,比如Component Service Controller Import Bean等。由于Service Controller 等都可以归为Component,那么Component 和Import 、Bean是何时被加载的,以及他们之间的顺序呢…...
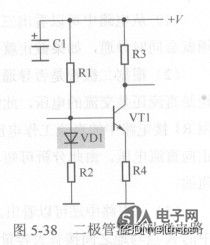
二极管温度补偿电路工作原理分析
众所周知,PN结导通后有一个约为0.6V(指硅材料PN结)的压降,同时PN结还有一个与温度相关的特性:PN结导通后的压降基本不变,但不是不变,PN结两端的压降随温度升高而略有下降,温度愈高其…...

【C语言】多线程之条件竞争
多线程(三)条件竞争并发程序引起的共享内存的问题死锁互斥锁机制生产者消费者模型信号量机制解决:条件竞争 #include<stdio.h> #include<stdlib.h> #include<pthread.h> void* Print(char* str){printf("%s ",s…...

UE NavigationSystem的相关实现
导航数据的构建流程导航数据的收集导航系统中绑定了Actor、Component注册完成以及取消时的委托,通过这些委托把数据及时更新到导航系统的八叉树结构中导航系统的辅助结构DefaultOctreeController、DefaultDirtyAreasController分别承担了空间数据查询和置脏区域重新…...
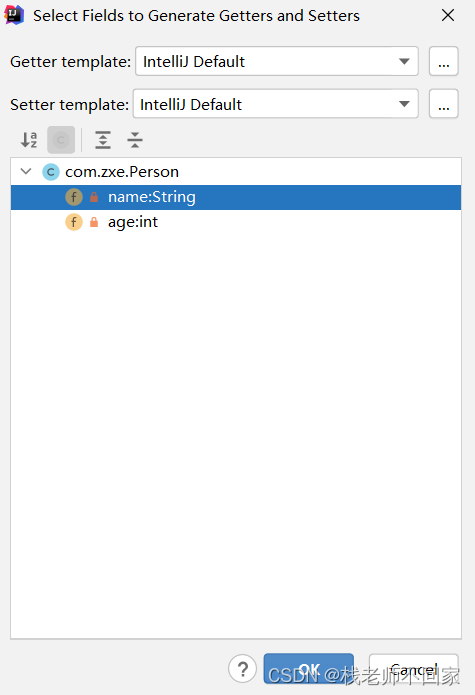
Java 继承
文章目录1. 继承概述2. 变量的访问特点3. super 关键字4. 构造方法的访问特点5. 成员方法的访问特点6. 方法重写7. 继承案例1. 继承概述 继承是面向对象三大特征之一。可以使得子类具有父类的属性和方法,还可以在子类中重新定义,追加属性和方法。 publ…...

Python学习笔记8:异常
异常 一些内置的异常类 类名描述Exception几乎所有的异常类都是从它派生而来的AttributeError引用属性或给它赋值失败时引发OSError操作系统不能执行指定的任务(如打开文件)时引发,有多个子类IndexError使用序列中不存在的索引时引发&#…...

python保留小数函数总结
python保留小数——‘%f’‘%.nf’% x(定义的变量) 例子:a 82.16332 print(%.1f% a) print(%.2f% a) print(%.3f% a) print(%.4f% a) print(%.10f% a)输出结果python保留小数——format()函数Python2.6 开始ÿ…...

狐狸优化算法(Matlab代码实现)
👨🎓个人主页:研学社的博客💥💥💞💞欢迎来到本博客❤️❤️💥💥🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密…...
浏览器自动化框架沦为攻击者的工具
5月27日消息,安全公司Team Cymru的研究人员表示,越来越多的威胁参与者正在使用免费的浏览器自动化框架作为其攻击活动的一部分。 研究人员表示,该框架的技术准入门槛故意保持在较低水平,以创建一个由内容开发者和贡献者组成的活跃…...
)
SQL必备知识(自用)
数据库基础知识sql和mysql的区别:数据库查询大全(select)1、select 字段名 from 表;2、In查询:用于过滤你所需要查询的内容3、范围查询:between4、模糊查询:like5、查询空值/非空:is…...
BI工具术语表大全:从字母A-Z全面收录
谈到商业智能行业,变革是不可避免的。为了跟上步伐,各种各样的BI 解决方案正在快速迭代更新,以满足企业的数字化需求,那么市场上BI 工具种类繁杂,到底如何选择适合功能全面、满足自己企业运转情况的、合适的BI 工具呢&…...
vue3 + vite + ts 集成mars3d
vue3 vite ts 集成mars3d 文章目录vue3 vite ts 集成mars3d前言一、创建一个vue3 vite ts项目二、引入mars3d相关依赖三、vite.config.ts 相关配置四、 新建DIV容器 创建地图前言 使用mars3d过程中,需要集成mars3d到自己的项目中,mars3d开发教程…...

【SpringBoot】100、SpringBoot中使用自定义注解+AOP实现参数自动解密
在实际项目中,用户注册、登录、修改密码等操作,都涉及到参数传输安全问题。所以我们需要在前端对账户、密码等敏感信息加密传输,在后端接收到数据后能自动解密。 1、引入依赖 <dependency><groupId>org.springframework.boot</groupId><artifactId...
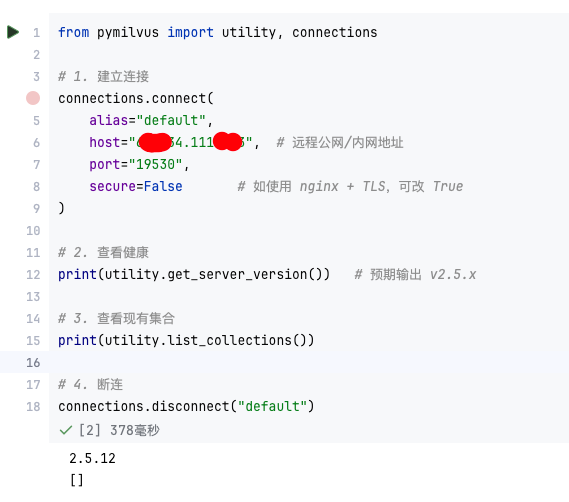
【大模型RAG】Docker 一键部署 Milvus 完整攻略
本文概要 Milvus 2.5 Stand-alone 版可通过 Docker 在几分钟内完成安装;只需暴露 19530(gRPC)与 9091(HTTP/WebUI)两个端口,即可让本地电脑通过 PyMilvus 或浏览器访问远程 Linux 服务器上的 Milvus。下面…...

条件运算符
C中的三目运算符(也称条件运算符,英文:ternary operator)是一种简洁的条件选择语句,语法如下: 条件表达式 ? 表达式1 : 表达式2• 如果“条件表达式”为true,则整个表达式的结果为“表达式1”…...

Spring Boot+Neo4j知识图谱实战:3步搭建智能关系网络!
一、引言 在数据驱动的背景下,知识图谱凭借其高效的信息组织能力,正逐步成为各行业应用的关键技术。本文聚焦 Spring Boot与Neo4j图数据库的技术结合,探讨知识图谱开发的实现细节,帮助读者掌握该技术栈在实际项目中的落地方法。 …...

CMake控制VS2022项目文件分组
我们可以通过 CMake 控制源文件的组织结构,使它们在 VS 解决方案资源管理器中以“组”(Filter)的形式进行分类展示。 🎯 目标 通过 CMake 脚本将 .cpp、.h 等源文件分组显示在 Visual Studio 2022 的解决方案资源管理器中。 ✅ 支持的方法汇总(共4种) 方法描述是否推荐…...

Java多线程实现之Thread类深度解析
Java多线程实现之Thread类深度解析 一、多线程基础概念1.1 什么是线程1.2 多线程的优势1.3 Java多线程模型 二、Thread类的基本结构与构造函数2.1 Thread类的继承关系2.2 构造函数 三、创建和启动线程3.1 继承Thread类创建线程3.2 实现Runnable接口创建线程 四、Thread类的核心…...
)
安卓基础(aar)
重新设置java21的环境,临时设置 $env:JAVA_HOME "D:\Android Studio\jbr" 查看当前环境变量 JAVA_HOME 的值 echo $env:JAVA_HOME 构建ARR文件 ./gradlew :private-lib:assembleRelease 目录是这样的: MyApp/ ├── app/ …...

Python 包管理器 uv 介绍
Python 包管理器 uv 全面介绍 uv 是由 Astral(热门工具 Ruff 的开发者)推出的下一代高性能 Python 包管理器和构建工具,用 Rust 编写。它旨在解决传统工具(如 pip、virtualenv、pip-tools)的性能瓶颈,同时…...
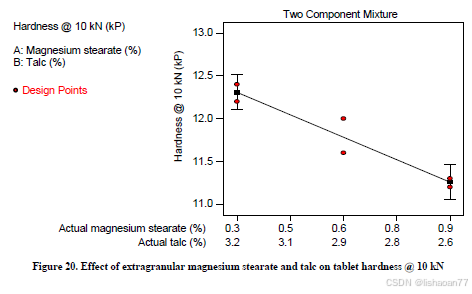
R语言速释制剂QBD解决方案之三
本文是《Quality by Design for ANDAs: An Example for Immediate-Release Dosage Forms》第一个处方的R语言解决方案。 第一个处方研究评估原料药粒径分布、MCC/Lactose比例、崩解剂用量对制剂CQAs的影响。 第二处方研究用于理解颗粒外加硬脂酸镁和滑石粉对片剂质量和可生产…...

SQL慢可能是触发了ring buffer
简介 最近在进行 postgresql 性能排查的时候,发现 PG 在某一个时间并行执行的 SQL 变得特别慢。最后通过监控监观察到并行发起得时间 buffers_alloc 就急速上升,且低水位伴随在整个慢 SQL,一直是 buferIO 的等待事件,此时也没有其他会话的争抢。SQL 虽然不是高效 SQL ,但…...