基于A7核开发板的串口实现控制LED亮灭
1.通过操作Cortex-A7核,串口输入相应的命令,控制LED灯进行工作
1>例如在串口输入led1on,开饭led1灯点亮
2>例如在串口输入led1off,开饭led1灯熄灭
3>例如在串口输入led2on,开饭led2灯点亮
4>例如在串口输入led2off,开饭led2灯熄灭
5>例如在串口输入led3on,开饭led3灯点亮
6>例如在串口输入led3off,开饭led3灯熄灭
2.编程要求:
1)结构体封装
typedef struct{
char* cmd_arr; //命令行字符串
gpio_t* gpiox;//GPIO组号
unsigned int pin; //引脚编号
status_t status; //LED灯状态
void(*gpio_write_pin)(gpio_t* gpiox,unsigned int pin,status_t status); //处理LED状态的函数指针
}cmd_t;
头文件:
#ifndef __NEW_H__
#define __NEW_H__#include "stm32mp1xx_rcc.h"
#include "stm32mp1xx_gpio.h"
#include "stm32mp1xx_uart.h"
//led初始化
void led_init();
void led1_init();
void led2_init();
void led3_init();//uart初始化
void uart4_init();
//接收一个字符
char get_char();
//接收一串字符
char *get_string();
//发送一个字符
void put_char(const char ch);
//发送一个字符串
void put_string(const char *sr);typedef enum{GPIO_RESET_T,GPIO_SET_T,
}status_t;#define GPIO_PIN_0 0
#define GPIO_PIN_1 1
#define GPIO_PIN_2 2
#define GPIO_PIN_3 3
#define GPIO_PIN_4 4
#define GPIO_PIN_5 5
#define GPIO_PIN_6 6
#define GPIO_PIN_7 7
#define GPIO_PIN_8 8
#define GPIO_PIN_9 9
#define GPIO_PIN_10 10
#define GPIO_PIN_11 11
#define GPIO_PIN_12 12
#define GPIO_PIN_13 13
#define GPIO_PIN_14 14
#define GPIO_PIN_15 15typedef struct{char* cmd;//命令gpio_t* gpiox;//组号unsigned int pin;//引脚status_t status;//灯的状态void(*gpio_write_pin)(gpio_t* gpiox,unsigned int pin,status_t status);//设置灯的状态
}cmd_t;/*
//灯亮
void led_on(int i);
//灯灭
void led_off(int i);
*/void hal_gpio_write(gpio_t* gpiox,unsigned int pin,status_t status);
cmd_t* find_command(char *string);
//比较字符串
int strcmp(char *arr,const char *src);#endif源文件:
#include "new.h"
extern void printf(const char *fmt,...);
extern void delay_ms(int ms);
cmd_t cmd_arr[6] = {[0] = {.cmd = "led1on",.gpiox = GPIOE,.pin = GPIO_PIN_10,.status = GPIO_SET_T,.gpio_write_pin = hal_gpio_write,},[1] = {.cmd = "led1off",.gpiox = GPIOE,.pin = GPIO_PIN_10,.status = GPIO_RESET_T,.gpio_write_pin = hal_gpio_write,},[2] = {.cmd = "led2on",.gpiox = GPIOF,.pin = GPIO_PIN_10,.status = GPIO_SET_T,.gpio_write_pin = hal_gpio_write,},[3] = {.cmd = "led2off",.gpiox = GPIOF,.pin = GPIO_PIN_10,.status = GPIO_RESET_T,.gpio_write_pin = hal_gpio_write,},[4] = {.cmd = "led3on",.gpiox = GPIOE,.pin = GPIO_PIN_8,.status = GPIO_SET_T,.gpio_write_pin = hal_gpio_write,},[5] = {.cmd = "led3off",.gpiox = GPIOE,.pin = GPIO_PIN_8,.status = GPIO_RESET_T,.gpio_write_pin = hal_gpio_write,}
};
//led初始化
void led_init()
{/********RCC章节*********/RCC->MP_AHB4ENSETR |= (0x1 << 4);//GPIOE使能 RCC->MP_AHB4ENSETR |= (0x1 << 5);//GPIOF使能led1_init();led2_init();led3_init();
}void led1_init()
{/********GPIO章节********/GPIOE->MODER &= (~(0x3 << 20));GPIOE->MODER |= (0x1 << 20);//输出模式GPIOE->OTYPER &= (~(0x1 << 10));//推挽GPIOE->OSPEEDR &= (~(0x3 << 20));//低速GPIOE->PUPDR &= (~(0x3 << 20));//无上下拉
}void led2_init()
{/********GPIO章节********/GPIOF->MODER &= (~(0x3 << 20));GPIOF->MODER |= (0x1 << 20);//输出模式GPIOF->OTYPER &= (~(0x1 << 10));//推挽GPIOF->OSPEEDR &= (~(0x3 << 20));//低速GPIOF->PUPDR &= (~(0x3 << 20));//无上下拉
}void led3_init()
{/********GPIO章节********/GPIOE->MODER &= (~(0x3 << 16));GPIOE->MODER |= (0x1 << 16);//输出模式GPIOE->OTYPER &= (~(0x1 << 8));//推挽GPIOE->OSPEEDR &= (~(0x3 << 16));//低速GPIOE->PUPDR &= (~(0x3 << 16));//无上下拉
}//uart初始化
void uart4_init()
{/********RCC章节*********/RCC->MP_AHB4ENSETR |= (0x1 << 1);//GPIOB使能RCC->MP_AHB4ENSETR |= (0x1 << 6);//GPIOG使能RCC->MP_APB1ENSETR |= (0x1 << 16);//UART4使能/********GPIO章节********/GPIOB->MODER &= (~(0x3 << 4));GPIOB->MODER |= (0x2 << 4);//复用模式GPIOG->MODER &= (~(0x3 << 22));GPIOG->MODER |= (0x2 << 22);//复用模式GPIOB->AFRL &= (~(0xf << 8));GPIOB->AFRL |= (0x8 << 8);//设置复用功能RXGPIOG->AFRH &= (~(0xf << 12));GPIOG->AFRH |= (0x6 << 12);//设置复用功能TX/********uart4章节*******/if(USART4->CR1 & (0x1)){delay_ms(500);USART4->CR1 &= (~(0x1));//禁止UE}USART4->CR1 &= (~(0x1 << 12));USART4->CR1 &= (~(0x1 << 28));//设置8位数据位USART4->CR1 &= (~(0x1 << 10));//无奇偶校验位USART4->CR1 &= (~(0x1 << 15));//x16采样率USART4->CR2 &= (~(0x3 << 12));//无停止位USART4->PRESC &= (~(0xf));//一级分配USART4->BRR = 0x22B;//115200USART4->CR1 |= (0x1 << 2);//读端使能USART4->CR1 |= (0x1 << 3);//写端使能USART4->CR1 |= 0x1;//UE使能}
//接收一个字符
char get_char()
{char ch;//检查接收寄存器是否有数据可读while(!(USART4->ISR & (0x1 << 5)));//接收字符ch = USART4->RDR;put_char(ch);return ch;
}
//接收一串字符
char buf[50] = "";
char *get_string()
{int i;for(i = 0;(buf[i] = get_char()) != '\r';i++);buf[i] = '\0';put_char('\n');put_char('\r');put_string(buf);return buf;
}
//发送一个字符
void put_char(const char ch)
{while(!(USART4->ISR & (0x1 << 7)));USART4->TDR = ch;while(!(USART4->ISR & (0x1 << 6)));
}
//发送一个字符串
void put_string(const char *sr)
{for(int i=0;sr[i] != '\0';i++){put_char(sr[i]);}put_char('\n');put_char('\r');
}
/*
//灯亮
void led_on(int i)
{switch(i){case 1:GPIOE->ODR |= (0x1 << 10);//led1亮break;case 2:GPIOF->ODR |= (0x1 << 10);//led2亮break;case 3:GPIOE->ODR |= (0x1 << 8);//led3亮break;}
}//灯灭
void led_off(int i)
{switch(i){case 1:GPIOE->ODR &= (~(0x1 << 10));//led1灭break;case 2:GPIOF->ODR &= (~(0x1 << 10));//led2灭break;case 3:GPIOE->ODR &= (~(0x1 << 8));//led3灭break;}
}*/
//比较字符串
int strcmp(char *arr,const char *src)
{while(*arr != '\0' || *src != '\0'){if(*arr == *src){arr++;src++;}else{return (*arr - *src);}}return 0;
}void hal_gpio_write(gpio_t* gpiox,unsigned int pin,status_t status)
{if(1 == status) gpiox->ODR |= (0x1 << pin);elsegpiox->ODR &= (~(0x1 << pin));
}cmd_t* find_command(char *string)
{for(int i=0;i < 6;i++){if(strcmp(cmd_arr[i].cmd,string) == 0){return &cmd_arr[i];}}return 0;
}
Main文件:
#include "new.h"
extern void printf(const char *fmt, ...);
void delay_ms(int ms)
{int i,j;for(i = 0; i < ms;i++)for (j = 0; j < 1800; j++);
}int main()
{led_init();uart4_init();put_string("start....");while(1){char *string = get_string();cmd_t *arr = find_command(string);if(0 == arr){printf("error commond\n");}else{arr->gpio_write_pin(arr->gpiox,arr->pin,arr->status);} }return 0;
}
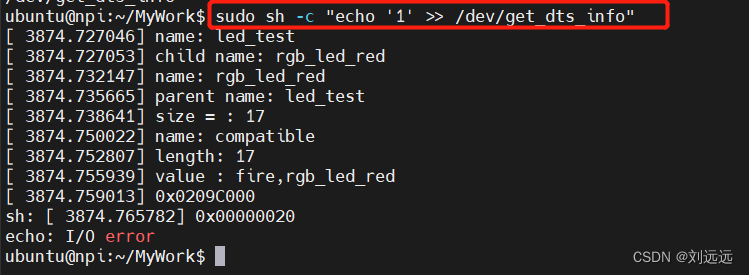
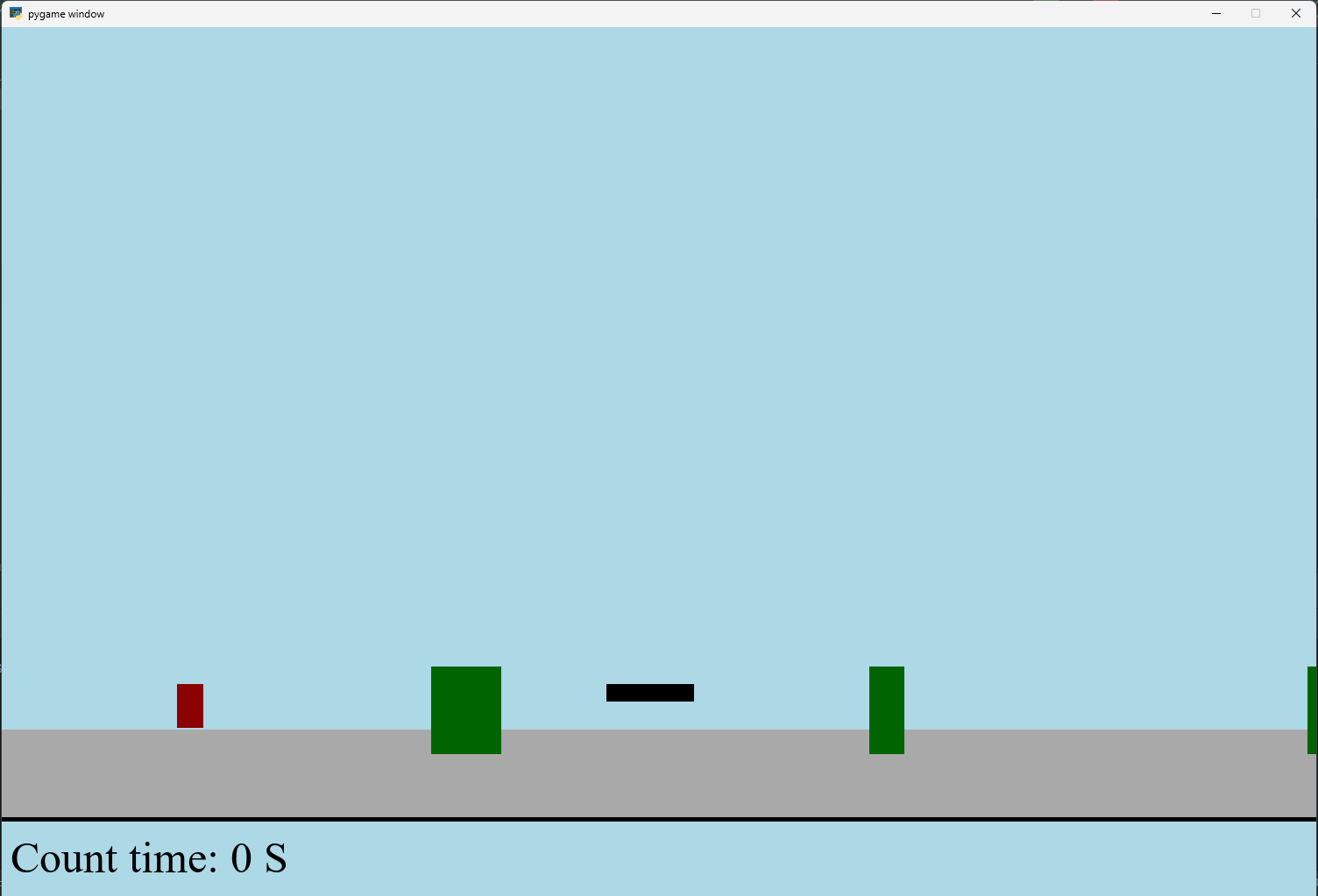
实现效果:
相关文章:

基于A7核开发板的串口实现控制LED亮灭
1.通过操作Cortex-A7核,串口输入相应的命令,控制LED灯进行工作 1>例如在串口输入led1on,开饭led1灯点亮 2>例如在串口输入led1off,开饭led1灯熄灭 3>例如在串口输入led2on,开饭led2灯点亮 4>例如在串口输入led2off,开饭led2灯熄灭 5>例如…...
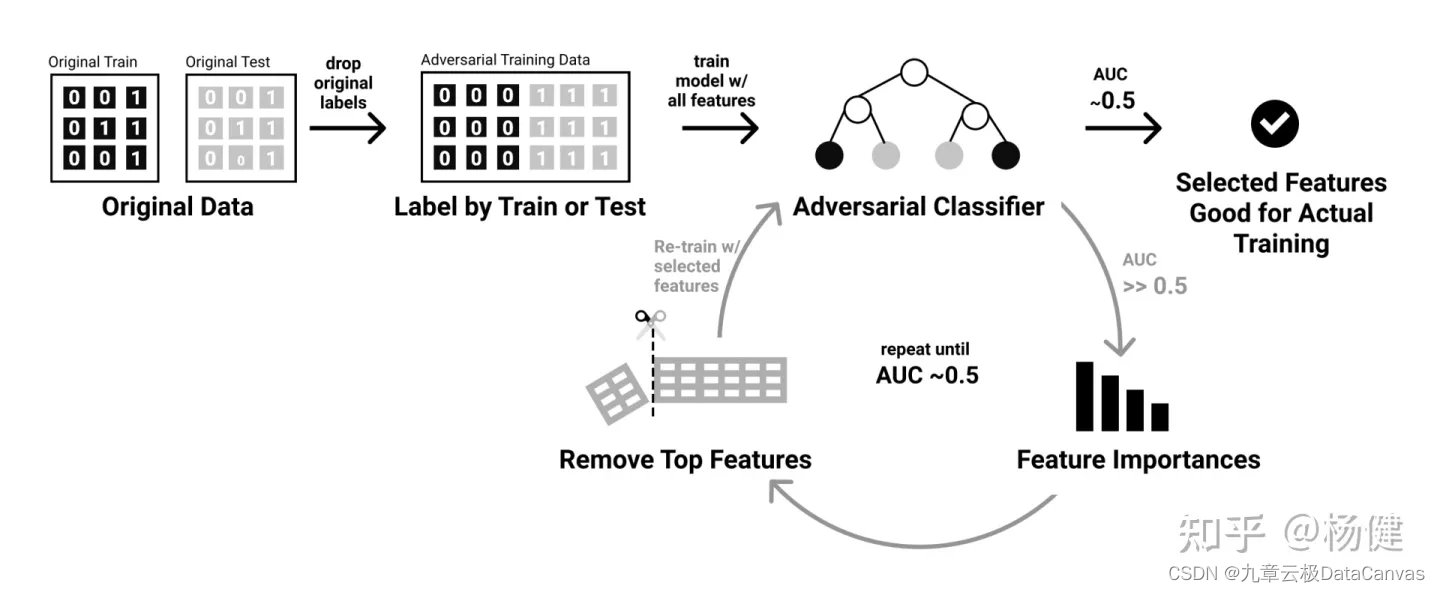
HyperGBM用Adversarial Validation解决数据漂移问题
本文作者:杨健,九章云极 DataCanvas 主任架构师 数据漂移问题近年在机器学习领域来越来越得到关注,成为机器学习模型在实际投产中面对的一个主要挑战。当数据的分布随着时间推移逐渐发生变化,需要预测的数据和用于训练的数据分布…...

关基系统三月重保安全监测怎么做?ScanV提供纯干货!
三月重保当前,以政府、大型国企央企、能源、金融等重要行业和领域为代表的关键信息基础设施运营单位都将迎来“网络安全大考”。 对重要关基系统进行安全风险监测并收敛暴露面,响应监管要求进行安全加固,重保期间实时安全监测与数据汇报等具体…...
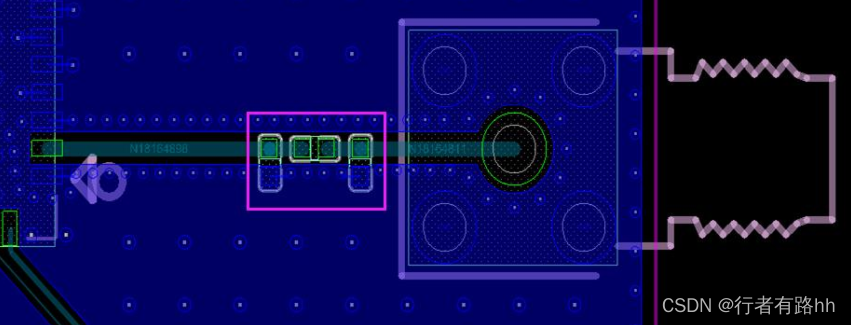
RK3588关键电路 PCB Layout设计指南
1、音频接口电路 PCB 设计(1)所有 CLK 信号建议串接 22ohm 电阻,并靠近 RK3588 放置,提高信号质量;(2)所有 CLK 信号走线不得挨在一起,避免串扰;需要独立包地,…...

二分边界详细总结
一、查找精确值 从一个有序数组中找到一个符合要求的精确值(如猜数游戏)。如查找值为Key的元素下标,不存在返回-1。 //这里是left<right。 //考虑这种情况:如果最后剩下A[i]和A[i1](这也是最容易导致导致死循环的…...
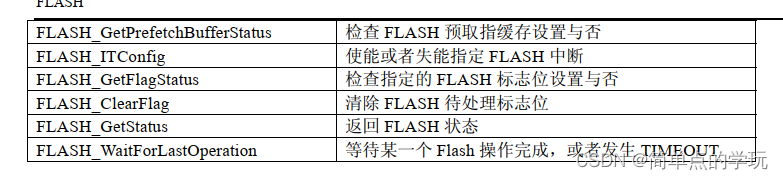
STM32---备份寄存器BKP和 FLASH学习使用
BKP库函数 学习BKP,首先就是知道BKP每一个函数的作用然后如何使用即可 使用备份域的作用只需要操作上面的两个函数即可,其余的都是它的其他功能 BKP简介 备份寄存器是42个16位的寄存器,可用来存储84个字节的用户应用程序数据。他们处在备份…...
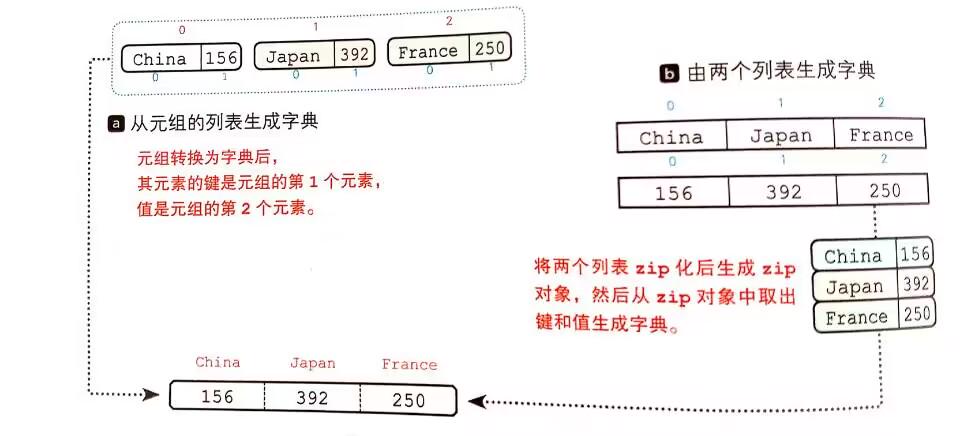
Python-生成元组和字典
1.生成元组元组是元素按顺序组合后的产物,元组对象的类型是tuple型含有两个元素的元组成为数据对元组可以包含任意数量和任意类型的元素,其元素总数可以为0、1、2等,并且元素的先后顺序是由意义的。另外,元组中的元素类型没有必要…...
I.MX6ULL内核开发10:设备树
目录 一、设备树简介 二、设备树源码 三、获取设备树信息 1、增加设备节点 2、内核编译设备树 3、替换设备树文件 4、查看设备树节点 5、在驱动中获取节点的属性 6、编译驱动模块 7、加载模块 一、设备树简介 设备树的作用是描述一个硬件平台的硬件资源。这个“设备树…...

【大数据】记一次hadoop集群missing block问题排查和数据恢复
问题描述 集群环境总共有2个NN节点,3个JN节点,40个DN节点,基于hadoop-3.3.1的版本。集群采用的双副本,未使用ec纠删码。 问题如下: bin/hdfs fsck -list-corruptfileblocks / The list of corrupt files under path…...

国产音质好的蓝牙耳机有哪些?国产音质最好的耳机排行
随着时间的推移,真无线蓝牙耳机逐渐占据耳机市场的份额,成为人们日常生活中必备的数码产品之一。蓝牙耳机品牌也多得数不胜数,哪些国产蓝牙耳机音质好?下面,我们从音质出来,来给大家介绍几款国产蓝牙耳机&a…...
CTFer成长之路之XSS的魔力
XSS的魔力CTF XSS闯关 题目描述: 你能否过关斩将解决所有XSS问题最终获得flag呢? docker-compose.yml version: "3.2"services:xss:image: registry.cn-hangzhou.aliyuncs.com/n1book/web-xss:latestports:- 3000:3000启动方式 docker-compose up -…...
行锁、表锁、主键外键、表之间的关联关系
Java知识点总结:想看的可以从这里进入 目录2.4、行锁、表锁2.5、主键、外键2.5.1、主键2.5.2、外键2.6、表的关联关系2.4、行锁、表锁 MyISAM默认采用表级锁,InnoDB默认采用行级锁。 表锁:开销小,加锁快,不会出现死锁…...
JavaScript 进阶(面试必备)--charater4
文章目录前言一、深浅拷贝:one: 浅拷贝:two:深拷贝二、异常处理:one: throw 抛异常:two: try /catch 捕获异常:three:debugger三、处理thisthis指向 :one:普通函数this指向this指向 :two: 箭头函数this指向3.2 改变this:one: call():two: apply():three: bind()四、性能优化:on…...
ARM+FPGA架构开发板PCIE2SCREEN示例分析与测试-米尔MYD-JX8MMA7
本篇测评由电子发烧友的优秀测评者“zealsoft”提供。 本次测试内容为米尔MYD-JX8MMA7开发板其ARM端的测试例程pcie2screen并介绍一下FPGA端程序的修改。 01. 测试例程pcie2screen 例程pcie2screen是配合MYD-JX8MMA7开发板所带的MYIR_PCIE_5T_CMOS 工程的测试例&#…...

51单片机入门 - SDCC / Keil_C51 会让没有调用的函数参与编译吗?
Small Device C Compiler(SDCC)是一款免费 C 编译器,适用于 8 位微控制器。 不想看测试过程的话可以直接划到最下面看结论:) 关于软硬件环境的信息: Windows 10STC89C52RCSDCC (构建HEX文件&…...
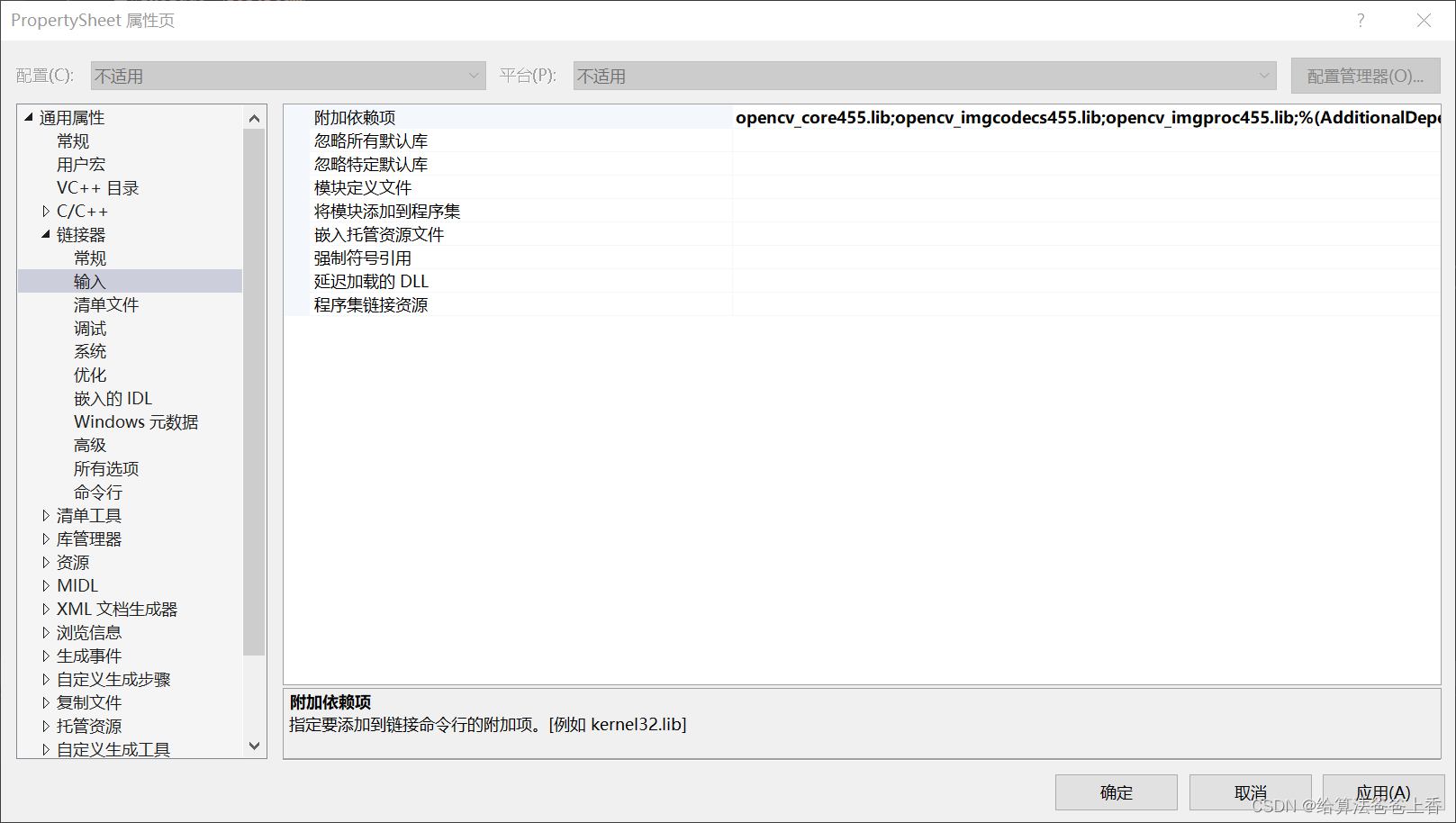
OpenCV只含基本图像模块编译
编译OpenCV4.5.5只含基本图像模块,环境为Windows10 x64CMake3.23.3VS2019。默认编译选项编译得到的OpenCV库往往大几百MB甚至上GB,本文配置下编译得到的库压缩后得到的zip包大小仅6.25MB,适合使用OpenCV基本图像功能模块的项目移植而不牵涉其…...
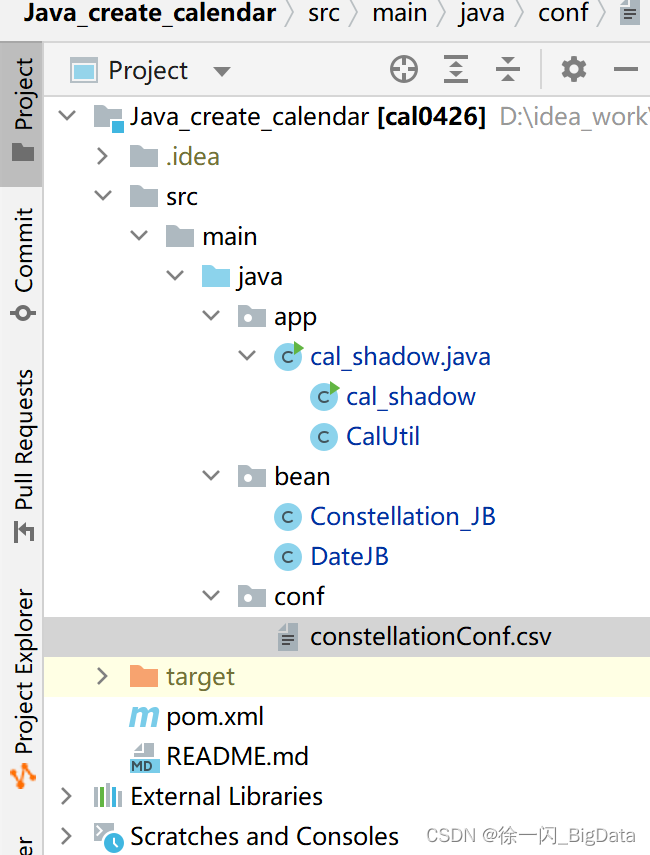
Java实现阴历日历表(附带星座)
准备工作 1.无敌外挂(GitHub直达源码) Nobb 直击灵魂 https://github.com/xuyishanBD/Java_create_calendar.git2.maven配置(如果没有走上面的捷径) <dependencies><dependency><groupId>net.sourceforge.javacsv</groupId><artifactId>javac…...
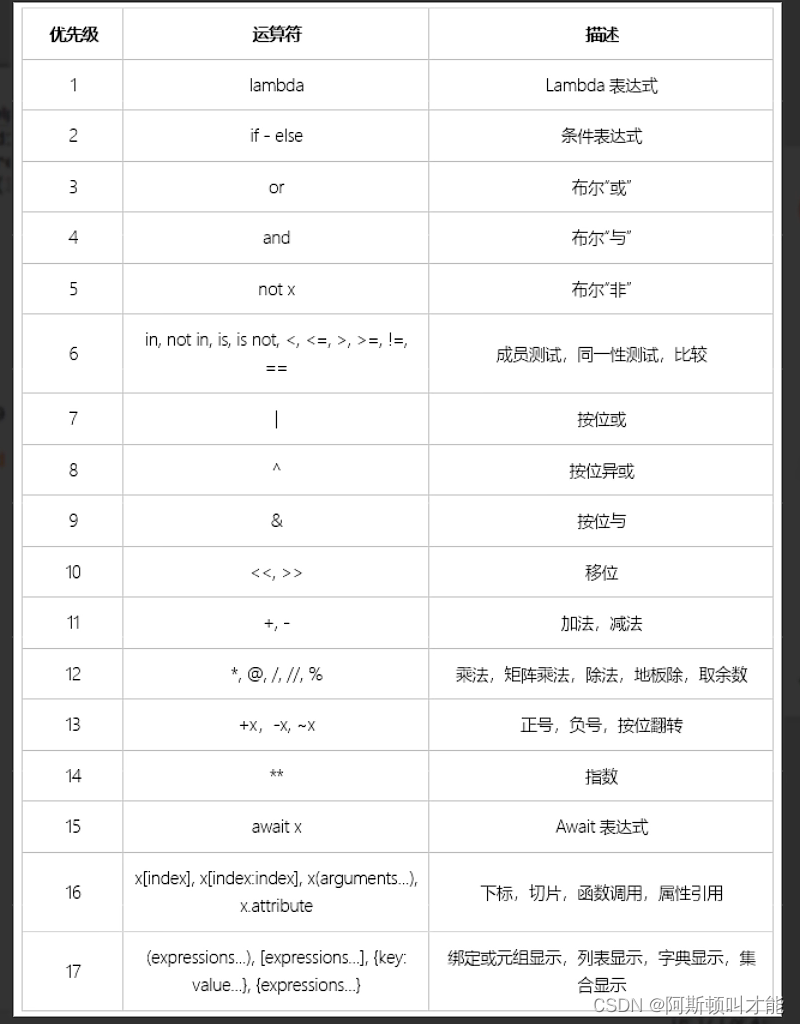
Python入门之最基础
Python入门之最基础 IDLE有两种模式,一种是交互模式,通俗讲就是写一个代码,会得到相应的反馈,另一种为编辑模式. 注意事项: 标点符号一定要用英文符号 要注意缩进 dir(builtins)可以看到python所有的内置函数&#…...
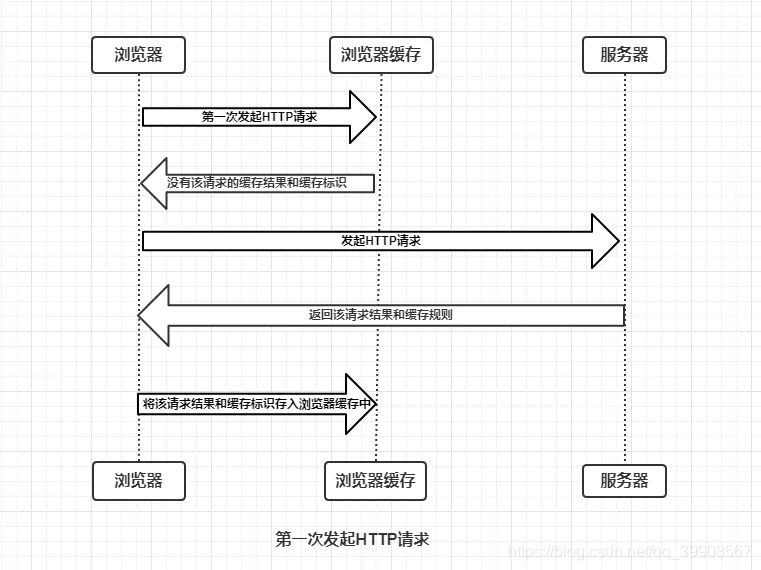
浏览器缓存策略
先走强缓存,再走协商缓存 强缓存 不发送请求,直接使用缓存的内容 状态码200 当前会话没有关闭的话就是走memory cache,否则就是disk cache 由响应头的 Pragma(逐渐废弃,优先级最高),catch-…...

高清无码的MP4如何采集?python带你保存~
前言 大家早好、午好、晚好吖 ❤ ~ 又是我,我又来采集小姐姐啦~ 这次我们采集的网站是(看下图): 本文所有模块\环境\源码\教程皆可点击文章下方名片获取此处跳转 话不多少,我们赶快开始吧~ 第三方模块: requests >>> pip install requests 如果安装python第三方模块…...

浅谈 React Hooks
React Hooks 是 React 16.8 引入的一组 API,用于在函数组件中使用 state 和其他 React 特性(例如生命周期方法、context 等)。Hooks 通过简洁的函数接口,解决了状态与 UI 的高度解耦,通过函数式编程范式实现更灵活 Rea…...

conda相比python好处
Conda 作为 Python 的环境和包管理工具,相比原生 Python 生态(如 pip 虚拟环境)有许多独特优势,尤其在多项目管理、依赖处理和跨平台兼容性等方面表现更优。以下是 Conda 的核心好处: 一、一站式环境管理:…...
【Python】 -- 趣味代码 - 小恐龙游戏
文章目录 文章目录 00 小恐龙游戏程序设计框架代码结构和功能游戏流程总结01 小恐龙游戏程序设计02 百度网盘地址00 小恐龙游戏程序设计框架 这段代码是一个基于 Pygame 的简易跑酷游戏的完整实现,玩家控制一个角色(龙)躲避障碍物(仙人掌和乌鸦)。以下是代码的详细介绍:…...
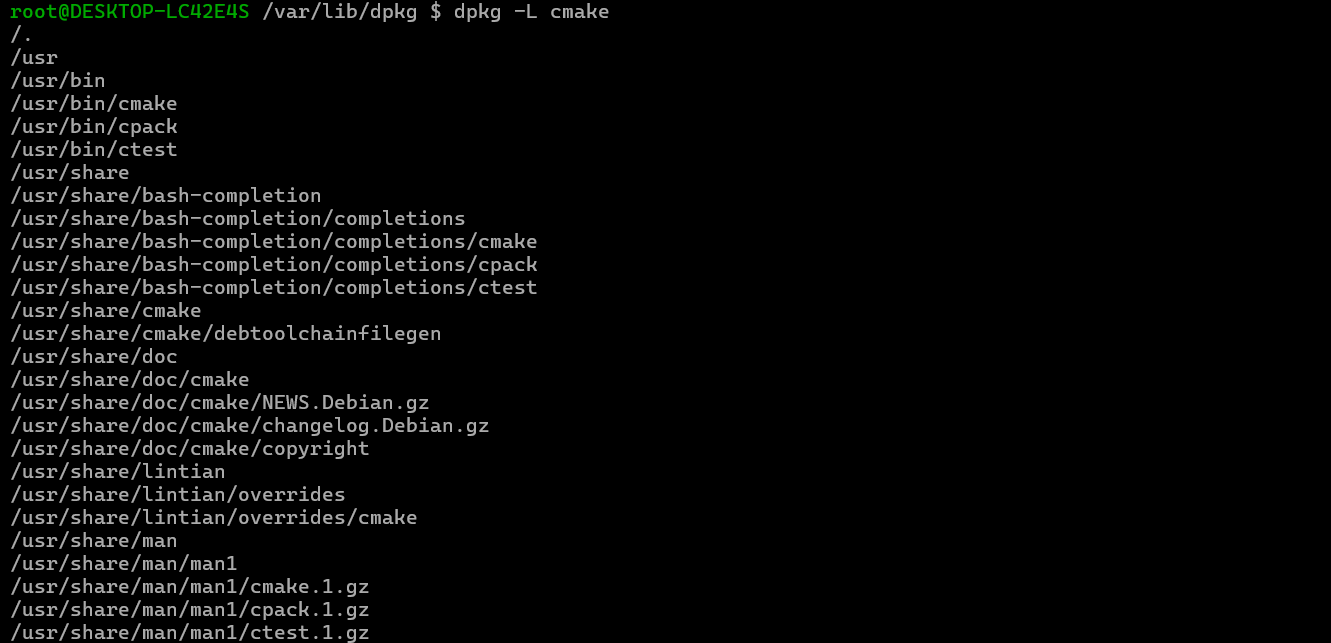
Debian系统简介
目录 Debian系统介绍 Debian版本介绍 Debian软件源介绍 软件包管理工具dpkg dpkg核心指令详解 安装软件包 卸载软件包 查询软件包状态 验证软件包完整性 手动处理依赖关系 dpkg vs apt Debian系统介绍 Debian 和 Ubuntu 都是基于 Debian内核 的 Linux 发行版ÿ…...

Swift 协议扩展精进之路:解决 CoreData 托管实体子类的类型不匹配问题(下)
概述 在 Swift 开发语言中,各位秃头小码农们可以充分利用语法本身所带来的便利去劈荆斩棘。我们还可以恣意利用泛型、协议关联类型和协议扩展来进一步简化和优化我们复杂的代码需求。 不过,在涉及到多个子类派生于基类进行多态模拟的场景下,…...
)
【位运算】消失的两个数字(hard)
消失的两个数字(hard) 题⽬描述:解法(位运算):Java 算法代码:更简便代码 题⽬链接:⾯试题 17.19. 消失的两个数字 题⽬描述: 给定⼀个数组,包含从 1 到 N 所有…...

FastAPI 教程:从入门到实践
FastAPI 是一个现代、快速(高性能)的 Web 框架,用于构建 API,支持 Python 3.6。它基于标准 Python 类型提示,易于学习且功能强大。以下是一个完整的 FastAPI 入门教程,涵盖从环境搭建到创建并运行一个简单的…...
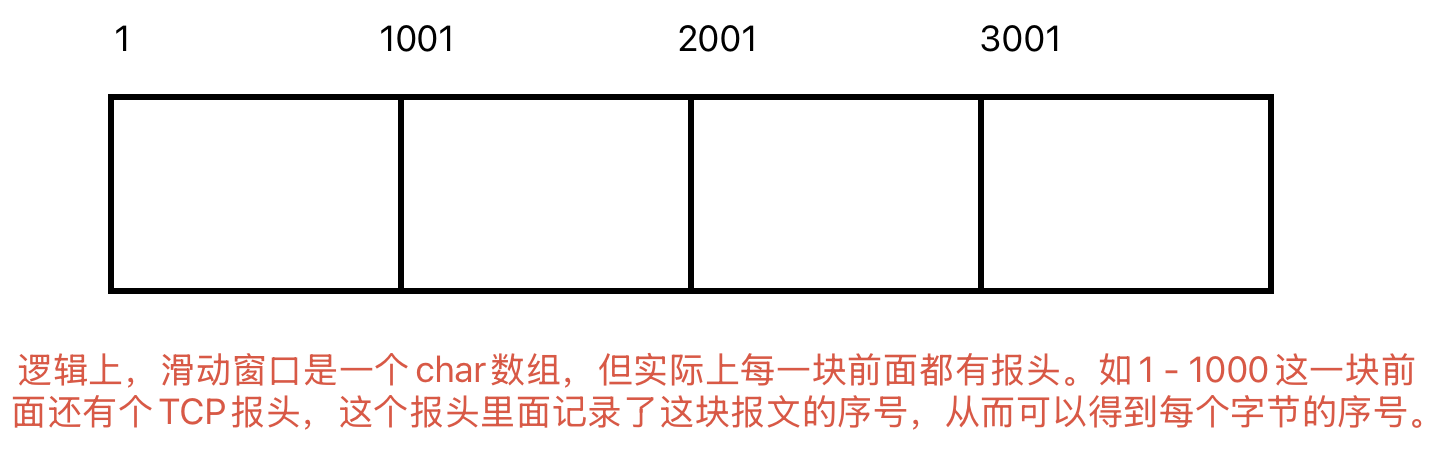
Linux相关概念和易错知识点(42)(TCP的连接管理、可靠性、面临复杂网络的处理)
目录 1.TCP的连接管理机制(1)三次握手①握手过程②对握手过程的理解 (2)四次挥手(3)握手和挥手的触发(4)状态切换①挥手过程中状态的切换②握手过程中状态的切换 2.TCP的可靠性&…...

【SQL学习笔记1】增删改查+多表连接全解析(内附SQL免费在线练习工具)
可以使用Sqliteviz这个网站免费编写sql语句,它能够让用户直接在浏览器内练习SQL的语法,不需要安装任何软件。 链接如下: sqliteviz 注意: 在转写SQL语法时,关键字之间有一个特定的顺序,这个顺序会影响到…...

2025盘古石杯决赛【手机取证】
前言 第三届盘古石杯国际电子数据取证大赛决赛 最后一题没有解出来,实在找不到,希望有大佬教一下我。 还有就会议时间,我感觉不是图片时间,因为在电脑看到是其他时间用老会议系统开的会。 手机取证 1、分析鸿蒙手机检材&#x…...