Linux信号 signal()编程
在Linux的进程间通信中可以用signal()函数进行信号与信息传递。
1.信号
信号的名字和编号:
每个信号都有一个名字和编号,这些名字都以“SIG”开头,例如“SIGIO ”、“SIGCHLD”等等。
信号定义在signal.h头文件中,信号名都定义为正整数。
具体的信号名称可以使用kill -l来查看信号的名字以及序号,信号是从1开始编号的,不存在0号信号。kill对于信号0又特殊的应用。
信号的名称:
CLC@Embed_Learn:~/jinchengtongxin$ kill -l
1) SIGHUP 2) SIGINT 3) SIGQUIT 4) SIGILL 5) SIGTRAP
6) SIGABRT 7) SIGBUS 8) SIGFPE 9) SIGKILL 10) SIGUSR1
11) SIGSEGV 12) SIGUSR2 13) SIGPIPE 14) SIGALRM 15) SIGTERM
16) SIGSTKFLT 17) SIGCHLD 18) SIGCONT 19) SIGSTOP 20) SIGTSTP
21) SIGTTIN 22) SIGTTOU 23) SIGURG 24) SIGXCPU 25) SIGXFSZ
26) SIGVTALRM 27) SIGPROF 28) SIGWINCH 29) SIGIO 30) SIGPWR
31) SIGSYS 34) SIGRTMIN 35) SIGRTMIN+1 36) SIGRTMIN+2 37) SIGRTMIN+3
38) SIGRTMIN+4 39) SIGRTMIN+5 40) SIGRTMIN+6 41) SIGRTMIN+7 42) SIGRTMIN+8
43) SIGRTMIN+9 44) SIGRTMIN+10 45) SIGRTMIN+11 46) SIGRTMIN+12 47) SIGRTMIN+13
48) SIGRTMIN+14 49) SIGRTMIN+15 50) SIGRTMAX-14 51) SIGRTMAX-13 52) SIGRTMAX-12
53) SIGRTMAX-11 54) SIGRTMAX-10 55) SIGRTMAX-9 56) SIGRTMAX-8 57) SIGRTMAX-7
58) SIGRTMAX-6 59) SIGRTMAX-5 60) SIGRTMAX-4 61) SIGRTMAX-3 62) SIGRTMAX-2
63) SIGRTMAX-1 64) SIGRTMAX
2.信号处理
信号的处理有三种方法,分别是:忽略、捕捉和默认动作
- 忽略信号,大多数信号可以使用这个方式来处理,但是有两种信号不能被忽略(分别是
SIGKILL和SIGSTOP)。因为他们向内核和超级用户提供了进程终止和停止的可靠方法,如果忽略了,那么这个进程就变成了没人能管理的的进程,显然是内核设计者不希望看到的场景 - 捕捉信号,需要告诉内核,用户希望如何处理某一种信号,说白了就是写一个信号处理函数,然后将这个函数告诉内核。当该信号产生时,由内核来调用用户自定义的函数,以此来实现某种信号的处理。
- 系统默认动作,对于每个信号来说,系统都对应由默认的处理动作,当发生了该信号,系统会自动执行。不过,对系统来说,大部分的处理方式都比较粗暴,就是直接杀死该进程。
如何发送信号指令呢?
用kill命令
kill命令就是一个发送信号的工具,
kill 9 PID:杀死进程(使用ps指令来查看pid号)
kill -SIGKILL PID:杀死进程
3.信号简单编程
信号处理函数:signal函数
高级。。。。:sigaction函数
signal原型:
#include <signal.h>
typedef void (*sighandler_t)(int);
sighandler_t signal(int signum, sighandler_t handler);可以通俗的认为该函数:通过设置一个函数(回调函数)来处理捕获到异常信号时需要执行的操作,这个函数就是sighandler_t handler,接受信号的是 signum;
- 根据函数原型可以看出由两部分组成,一个是真实处理信号的函数,另一个是注册函数了。
对于sighandler_t signal(int signum, sighandler_t handler);函数来说,signum 显然是信号的编号,handler 是中断函数的指针。
- 同样,
typedef void (*sighandler_t)(int);中断函数的原型中,有一个参数是 int 类型,显然也是信号产生的类型,方便使用一个函数来处理多个信号。
kill函数原型:
-
#include <sys/types.h>#include <signal.h>int kill(pid_t pid, int sig);
pid:输入进程pid号可以使用getpid()函数
sig:要干什么的信号,可以直接输入信号名称的数字;如9,对应关闭进程
- 示例代码:实现输入ctrl+c关闭不了程序,只有输入kill可以
#include <signal.h>
#include <stdio.h>// typedef void (*sighandler_t)(int);// sighandler_t signal(int signum, sighandler_t handler);void handler(int signum)
{printf("get signal=%d\n",signum);switch(signum){case 2:printf("SIGINT\n");break;case 9:printf("SIGKILL");break;}
}int main()
{signal(SIGINT,handler);signal(SIGKILL,handler);while(1);return 0;
}结果:
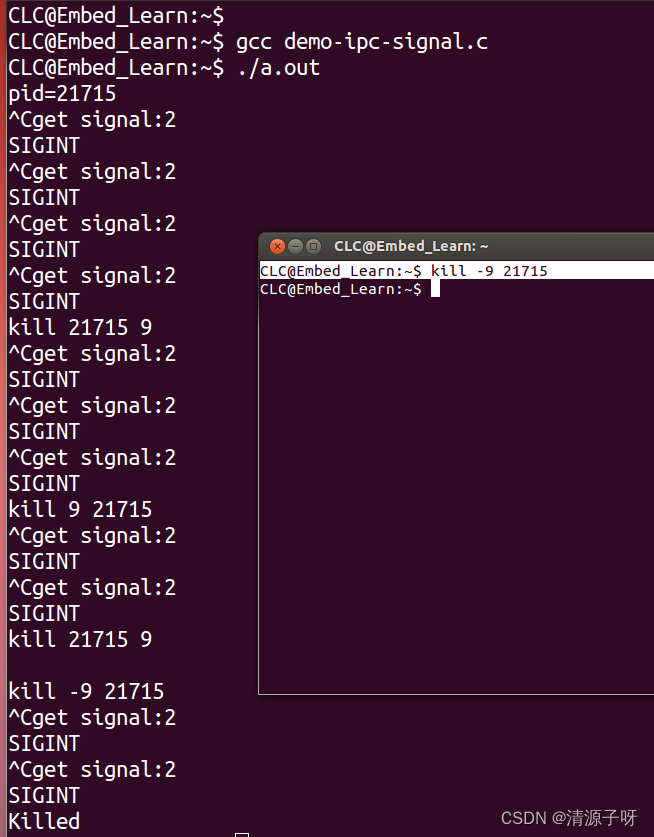
!!要在别的命令窗口输入kill -9 pid 才能杀死进程!!!
- 实现信号的忽略
通过在signal函数里写入SIG_IGN忽略信号的宏 实现
#include <signal.h>
#include <stdio.h>// typedef void (*sighandler_t)(int);// sighandler_t signal(int signum, sighandler_t handler);void handler(int signum)
{printf("get signal=%d\n",signum);switch(signum){case 2:printf("SIGINT\n");break;case 9:printf("SIGKILL");break;}
}int main()
{signal(SIGINT,SIG_IGN);//SIG_IGN忽略信号的宏signal(SIGKILL,SIG_IGN);while(1);return 0;
}4.收发信号并携带信息
入门:上述实现了简单的信号收发通过发信号 kill和收信号 signal,但是,无法携带信息
要实现携带信息需要解决:
高级:
发信号sigqueue:①用什么发②怎么放入消息
收信号sigaction:①用什么绑定函数②如何读出消息
sigaction函数原型:
#include <signal.h>
int sigaction(int signum, const struct sigaction *act, struct sigaction *oldact);struct sigaction {void (*sa_handler)(int); //信号处理程序,不接受额外数据,SIG_IGN 为忽略,SIG_DFL 为默认动作void (*sa_sigaction)(int, siginfo_t *, void *); //信号处理程序,能够接受额外数据和sigqueue配合使用sigset_t sa_mask;//阻塞关键字的信号集,可以再调用捕捉函数之前,把信号添加到信号阻塞字,信号捕捉函数返回之前恢复为原先的值。int sa_flags;//影响信号的行为SA_SIGINFO表示能够接受数据};
//回调函数句柄sa_handler、sa_sigaction只能任选其一这个函数的原版帮助信息,可以通过man sigaction来查看。
注意此结构体的用法!!!
sigaction 是一个系统调用,根据这个函数原型,我们不难看出,在函数原型中,第一个参数signum参数指出要捕获的信号类型;第二个参数act如果不为空说明需要对该信号有新的配置;第三个参数oldact如果不为空,那么可以对之前的信号配置进行备份,以方便之后进行恢复。
sigaction函数的返回值为0表示成功,否则表示失败。如果成功,它将设置新的信号处理方式并清除旧的信号处理方式。如果失败,它将返回一个错误码
在这里额外说一下struct sigaction结构体中的 sa_mask 成员,设置在其的信号集中的信号,会在捕捉函数调用前设置为阻塞,并在捕捉函数返回时恢复默认原有设置。这样的目的是,在调用信号处理函数时,就可以阻塞默写信号了。在信号处理函数被调用时,操作系统会建立新的信号阻塞字,包括正在被递送的信号。因此,可以保证在处理一个给定信号时,如果这个种信号再次发生,那么他会被阻塞到对之前一个信号的处理结束为止。
sigaction 的时效性:当对某一个信号设置了指定的动作的时候,那么,直到再次显式调用 sigaction并改变动作之前都会一直有效。
关于结构体中的 flag 属性的详细配置,在此不做详细的说明了,只说明其中一点。如果设置为 SA_SIGINFO 属性时,说明了信号处理程序带有附加信息,也就是会调用 sa_sigaction 这个函数指针所指向的信号处理函数。否则,系统会默认使用 sa_handler 所指向的信号处理函数。在此,还要特别说明一下,sa_sigaction 和 sa_handler 使用的是同一块内存空间,相当于 union,所以只能设置其中的一个,不能两个都同时设置。
关于void (*sa_sigaction)(int, siginfo_t *, void *);处理函数来说还需要有一些说明。void* 是接收到信号所携带的额外数据;而struct siginfo这个结构体主要适用于记录接收信号的一些相关信息。
siginfo_t {int si_signo; /* Signal number */int si_errno; /* An errno value */int si_code; /* Signal code */int si_trapno; /* Trap number that causedhardware-generated signal(unused on most architectures) */pid_t si_pid; /* Sending process ID */uid_t si_uid; /* Real user ID of sending process */int si_status; /* Exit value or signal */clock_t si_utime; /* User time consumed */clock_t si_stime; /* System time consumed */sigval_t si_value; /* Signal value */ //输入参数int si_int; /* POSIX.1b signal */void *si_ptr; /* POSIX.1b signal */int si_overrun; /* Timer overrun count; POSIX.1b timers */int si_timerid; /* Timer ID; POSIX.1b timers */void *si_addr; /* Memory location which caused fault */int si_band; /* Band event */int si_fd; /* File descriptor */
}其中的成员很多,si_signo 和 si_code 是必须实现的两个成员。可以通过这个结构体获取到信号的相关信息。
关于发送过来的数据是存在两个地方的,sigval_t si_value这个成员中有保存了发送过来的信息;同时,在si_int或者si_ptr成员中也保存了对应的数据。
发信号
sigqueue函数原型:
#include <signal.h>
int sigqueue(pid_t pid, int sig, const union sigval value);
union sigval {int sival_int;void *sival_ptr;};其中,第一个参数指定接收信号的进程ID,第二个参数确定即将发送的信号,第三个参数是指向sigval结构体的指针,用于设置信号的值。如果将value设置为NULL,则表示使用默认值。
union sigval value是用于设置信号值的结构体,它定义在头文件<signal.h>中。sigval结构体包含两个成员:sival_int和sival_ptr。
sival_int是一个整数类型,用于表示信号的值。如果传递一个整数值给value指针,则使用sival_int来存储该值。!!!携带信息sival_ptr是一个指向指针的指针类型,用于表示信号的值。如果传递一个指针给value指针,则使用sival_ptr来存储该指针。
使用 sigaction 函数安装信号处理程序时,制定了 SA_SIGINFO 的标志。
sigaction 结构体中的 sa_sigaction 成员提供了信号捕捉函数。如果实现的是 sa_handler 成员,那么将无法获取额外携带的数据。
sigqueue 函数只能把信号发送给单个进程,可以使用 value 参数向信号处理程序传递整数值或者指针值。
sigqueue 函数不但可以发送额外的数据,还可以让信号进行排队(操作系统必须实现了 POSIX.1的实时扩展),对于设置了阻塞的信号,使用 sigqueue 发送多个同一信号,在解除阻塞时,接受者会接收到发送的信号队列中的信号,而不是直接收到一次。
但是,信号不能无限的排队,信号排队的最大值受到SIGQUEUE_MAX的限制,达到最大限制后,sigqueue 会失败,errno 会被设置为 EAGAIN。
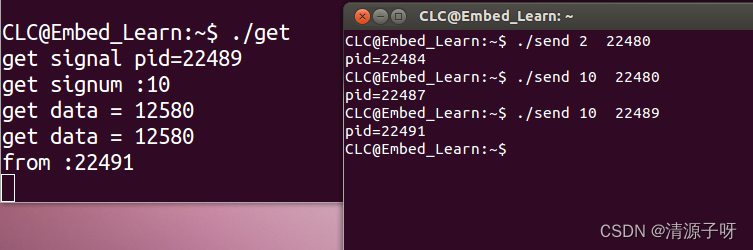
代码收发演示:
收信号:
#include <stdio.h>
#include <signal.h>
// int sigaction(int signum, const struct sigaction *act,struct sigaction *oldact);
/*struct sigaction {void (*sa_handler)(int); //信号处理程序,不接受额外数据,SIG_IGN 为忽略,SIG_DFL 为默认动作void (*sa_sigaction)(int, siginfo_t *, void *); //信号处理程序,能够接受额外数据和sigqueue配合使用sigset_t sa_mask;//阻塞关键字的信号集,可以再调用捕捉函数之前,把信号添加到信号阻塞字,信号捕捉函数返回之前恢复为原先的值。int sa_flags;//影响信号的行为SA_SIGINFO表示能够接受数据};
//回调函数句柄sa_handler、sa_sigaction只能任选其一*/void handler(int signum,siginfo_t *info, void *context) // void (*sa_sigaction)(int, siginfo_t *, void *);
{printf("get signum :%d\n",signum);if(context != NULL){printf("get data = %d\n",info->si_int); /* POSIX.1b signal */printf("get data = %d\n",info->si_value.sival_int); /* Signal value */ //输入参数printf("from :%d\n",info->si_pid); /* Sending process ID */} }int main()
{struct sigaction act;act.sa_sigaction=handler;act.sa_flags=SA_SIGINFO;printf("get signal pid=%d\n",getpid());sigaction(SIGUSR1,&act,NULL);//SIGUSR1 用户自定义信号 默认处理:进程终止 while(1);return 0;
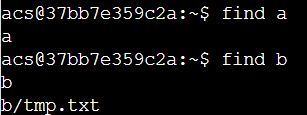
}发信号:
#include <stdio.h>
#include<signal.h>int main(int argc,char **argv)
{int signum;int pid;signum=atoi(argv[1]);//ASCALL TO INTpid = atoi(argv[2]);union sigval value;value.sival_int = 12580;sigqueue(pid,signum,value);printf("pid=%d\n",getpid());return 0;
}结果:
发现问题:
问si_value和si_int有啥区别,为啥输出一样?
si_value和si_int都是siginfo_t结构体的成员,用于存储与信号相关的信息。它们之间的区别如下:
-
类型不同:si_value是一个联合体类型,它可以存储不同类型的信号值,包括整型、长整型和指针类型等;而si_int是一个整型成员变量,用于存储信号的整数值。
-
存储的信息不同:si_value可以存储不同类型的信号值,例如SIGINT、SIGSEGV等信号的整数值、长整数值和指针值等;而si_int只能存储信号的整数值。
-
获取方式不同:在C语言中,可以使用si_value.sival_int来获取信号的整数值;而使用si_int可以直接获取信号的整数值,不需要再次引用联合体类型。
相关文章:
Linux信号 signal()编程
在Linux的进程间通信中可以用signal()函数进行信号与信息传递。 1.信号 信号的名字和编号: 每个信号都有一个名字和编号,这些名字都以“SIG”开头,例如“SIGIO ”、“SIGCHLD”等等。 信号定义在signal.h头文件中&am…...

【LeetCode】16.最接近的三数之和
1 问题 给你一个长度为 n 的整数数组 nums 和 一个目标值 target。请你从 nums 中选出三个整数,使它们的和与 target 最接近。 返回这三个数的和。 假定每组输入只存在恰好一个解。 示例 1: 输入:nums [-1,2,1,-4], target 1 输出&…...
嵌入式开发学习之STM32F407点亮LED及J-Link下载(二)
嵌入式开发学习之STM32F407点亮LED及J-Link下载(二) 开发涉及工具控制端口配置端口的设定与确认端口配置方法实现点亮LED程序下载与仿真 有工程实例,链接在最底部。 开发涉及工具 开发环境(IDE):IAR-ARM8…...

智能呼叫中心系统的未来发展趋势:为企业开启全新服务模式
随着人工智能技术的不断发展,智能呼叫中心系统已经成为现代企业服务的重要组成部分。随着客户需求的不断升级,智能呼叫中心系统的未来发展趋势也受到了广泛关注。以下是一些关于未来发展趋势的观点和建议。 1、大数据和人工智能技术 未来的系统将更多地…...

UE5中实现沿样条线创建网格体2-SplineMesh版本
我在之前的一篇文章中写过沿样条线创建网格体的方法: https://blog.csdn.net/grayrail/article/details/130453733 但该方法没有网格变形操作,就会导致每一段网格对象是无法连接的: 后来发现了SplineMesh方法可以比较好的解决这个问题&…...
实现Element Select选择器滚动加载
<template><el-selectpopper-class"more-tag-data"v-model"tagId"filterableplaceholder"请选择"focus"focusTag"><el-optionv-for"(item, index) in taskTagLists":key"index":label"item.n…...

C++ 之 Vector 和 List
Vector vector 是C STL中最常用的容器,支持存储多种类型的数据。 与数组相比,它的大小是可变的,因此也会被称为动态数组。 使用它,需要包含头文件: #include <vector>定义的结构: vector<数据类…...

力扣-448.找到所有数组中消失的数字
Idea 模拟 class Solution { public:vector<int> findDisappearedNumbers(vector<int>& nums) {int n nums.size();vector<int> a(n 1, 0);for(int i : nums) a[i];vector<int> ans;for(int i 1; i < n; i) if(!a[i]) ans.emplace_back(i);r…...

常用gdb调试命令
常见gdb调试命令 命令名 命令缩写 命令说明 backtrace bt 查看函数调用堆栈 frame f 查看栈帧 list l 查看源码 print p 打印内部变量值 info i 查看程序状态 display disp 跟踪某变量,每次停下来则显示值 run r 开始运行程序 continue c 继续程序运行,直到下一个断…...

【动手学深度学习-Pytorch版】BERT预测系列——用于预测的BERT数据集
本小节的主要任务即是将wiki数据集转成BERT输入序列,具体的任务包括: 读取wiki数据集生成下一句预测任务的数据—>主要用于_get_nsp_data_from_paragraph函数从输入paragraph生成用于下一句预测的训练样本:_get_nsp_data_from_paragraph生…...

【数据结构-字符串 三】【栈的应用】字符串解码
废话不多说,喊一句号子鼓励自己:程序员永不失业,程序员走向架构!本篇Blog的主题是【字符串转换】,使用【字符串】这个基本的数据结构来实现,这个高频题的站点是:CodeTop,筛选条件为&…...
Stm32_标准库_10_TIM_显示时间日期
利用TIM计数耗费1s,启动中断,秒表加一 时间显示代码: #include "stm32f10x.h" // Device header #include "Delay.h" #include "OLED.h"uint16_t num 0; TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; NVIC_I…...
10-SRCNN-使用CNN实现超分辨成像
文章目录 utils_dataset.pymodel.pytrain.pyuse.py主要文件 utils_dataset.py 工具文件,主要用来制作dataset,便于加入dataloader,用于实现数据集的加载和并行读取 model.py 主要写入网络(模型) train.py 主要用于训练 use.py 加载训练好的模型,用于测试或使用 utils_dat…...

cmd/bat 输出符,控制台日志输出到文件
前言 略 输出符 A > B将A执行结果覆盖写入B A >> B将A执行结果追加写入B 常用句柄 句柄句柄的数字代号描述STDIN0键盘输入STDOUT1输出到命令提示符窗口STDERR2错误输出到命令提示符窗口 控制台日志输出到文件 1.bat 1>d:\log.log将控制台日志输出到文件 d:…...

ODrive移植keil(七)—— 插值算法和偏置校准
目录 一、角度读取1.1、硬件接线1.2、程序演示1.3、代码说明 二、锁相环和插值算法2.1、锁相环2.2、插值2.3、角度补偿 三、偏置校准3.1、硬件接线3.2、官方代码操作3.3、移植后的代码操作3.4、代码说明3.5、SimpleFOC的偏置校准对比 ODrive、VESC和SimpleFOC 教程链接汇总&…...
【肌电信号】OpenSignals使用方法 --- 肌电信号采集及导入matlab
一、 多通道采集教学 1. 数据线连接 将PLUX设备通过USB或蓝牙与电脑连接,注意确认在几号通道接线。 2.实时数据采集可视化 进行设置。需要在软件中选择你的PLUX设备,并配置相关的参数,如采样率、分辨率、信号类型等 3 支持数据回放和…...
STM32 多功能按键中断
key1 开关实现led1亮灭,key2开关实现蜂鸣器开关,key3开关实现风扇开关 main.c #include "uart.h" #include "key_it.h" #include "led.h" int main() {char c;char *s;uart4_init();//串口初始化all_led_init();key_it_config();fengshan_init…...
Linux-文件管理命令
绝对路径:从根目录开始描述的路径 pwd输入即为绝对路径, 开头一定是“/”,因为一定是从根目录开始走 相对路径:从当前路径开始描述的路径,开头不一定是“/”,因为不一定是从根目录开始走的 .:是当前目录 。…...
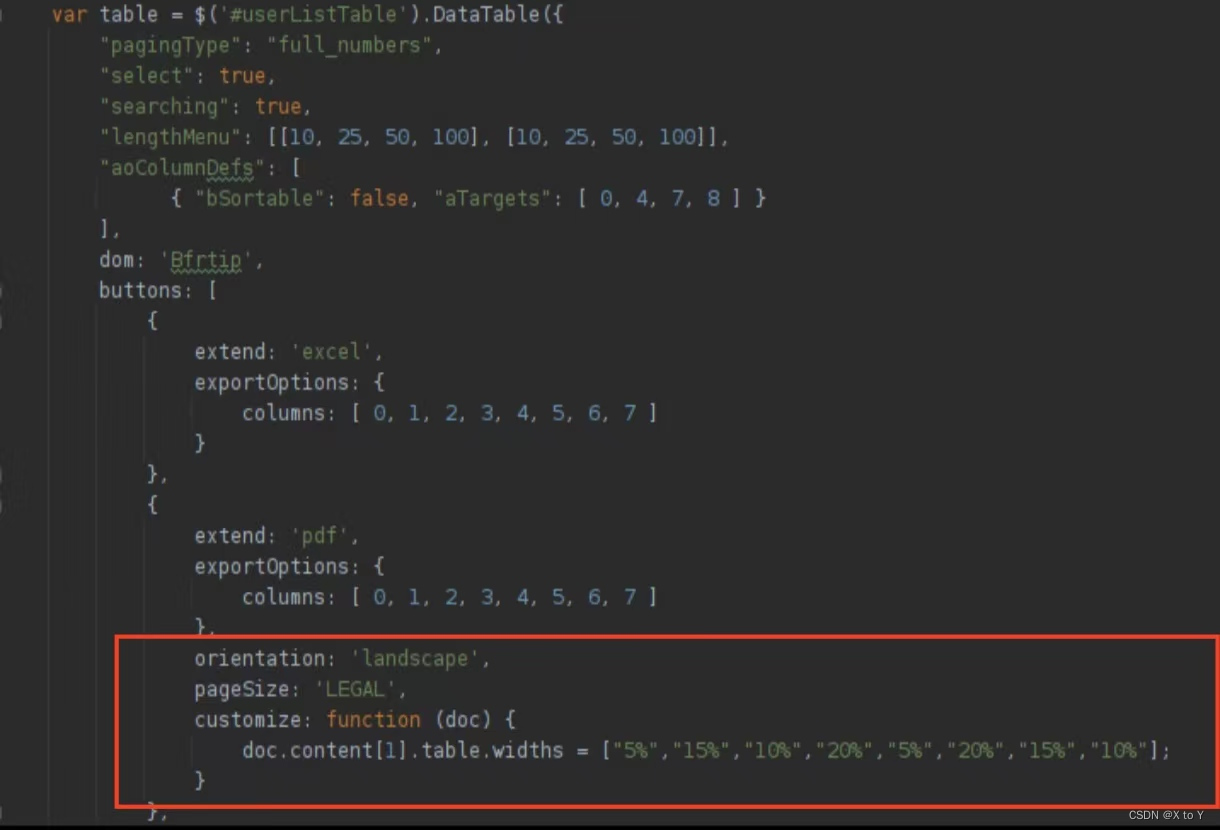
JS DataTable中导出PDF右侧列被截断的问题解决
JS DataTable中导出PDF右侧列被截断的问题解决 文章目录 JS DataTable中导出PDF右侧列被截断的问题解决一. 问题二. 解决办法三. 代码四. 参考资料 一. 问题 二. 解决办法 设置PDF大小和版型 orientation: landscape, pageSize: LEGAL,上述代码设置打印的PDF尺寸为LEGAL&…...
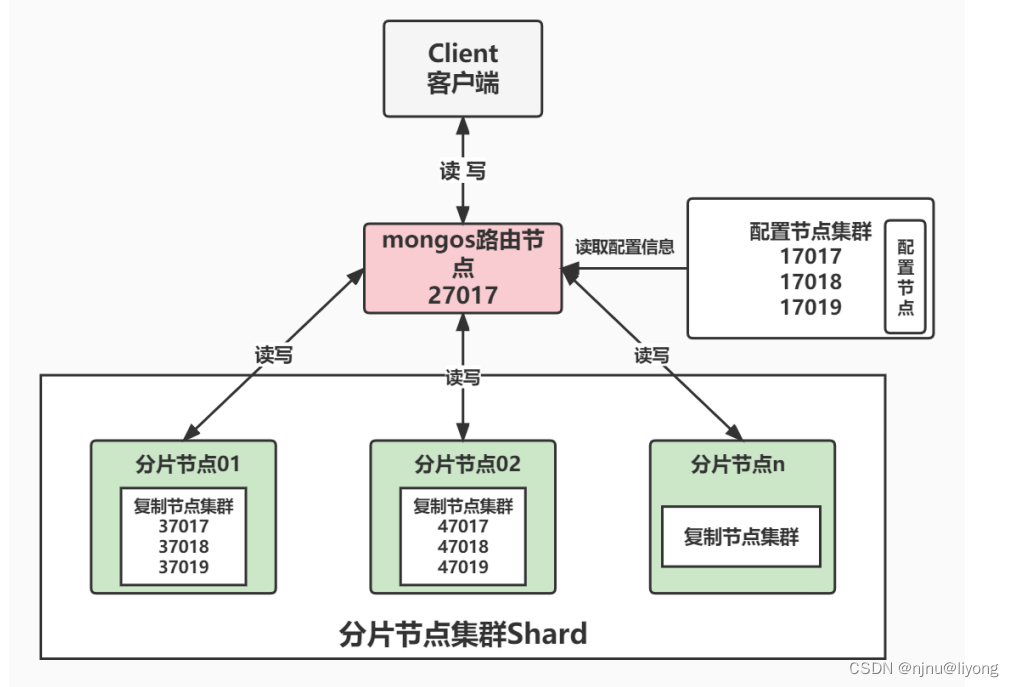
学习笔记-MongoDB(复制集,分片集集群搭建)
复制集群搭建 基本介绍 什么是复制集? 复制集是由一组拥有相同数据集的MongoDB实例做组成的集群。 复制集是一个集群,它是2台及2台以上的服务器组成,以及复制集成员包括Primary主节点,Secondary从节点和投票节点。 复制集提供了…...

生成xcframework
打包 XCFramework 的方法 XCFramework 是苹果推出的一种多平台二进制分发格式,可以包含多个架构和平台的代码。打包 XCFramework 通常用于分发库或框架。 使用 Xcode 命令行工具打包 通过 xcodebuild 命令可以打包 XCFramework。确保项目已经配置好需要支持的平台…...
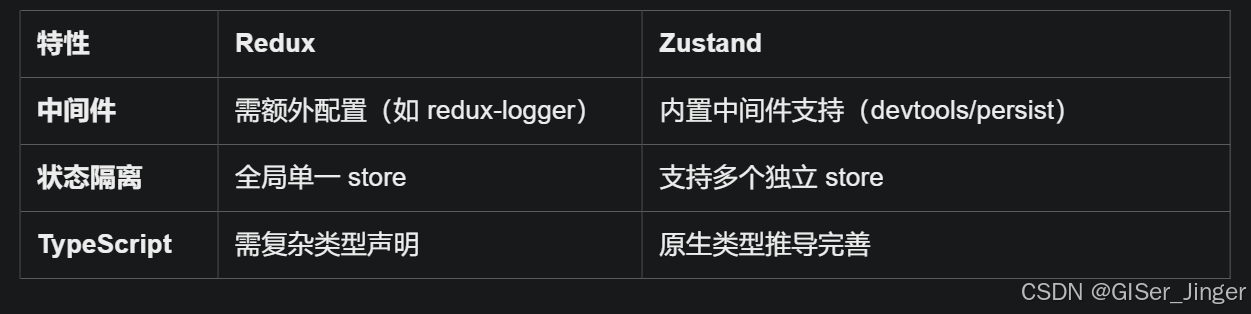
Zustand 状态管理库:极简而强大的解决方案
Zustand 是一个轻量级、快速和可扩展的状态管理库,特别适合 React 应用。它以简洁的 API 和高效的性能解决了 Redux 等状态管理方案中的繁琐问题。 核心优势对比 基本使用指南 1. 创建 Store // store.js import create from zustandconst useStore create((set)…...

k8s从入门到放弃之Ingress七层负载
k8s从入门到放弃之Ingress七层负载 在Kubernetes(简称K8s)中,Ingress是一个API对象,它允许你定义如何从集群外部访问集群内部的服务。Ingress可以提供负载均衡、SSL终结和基于名称的虚拟主机等功能。通过Ingress,你可…...

对WWDC 2025 Keynote 内容的预测
借助我们以往对苹果公司发展路径的深入研究经验,以及大语言模型的分析能力,我们系统梳理了多年来苹果 WWDC 主题演讲的规律。在 WWDC 2025 即将揭幕之际,我们让 ChatGPT 对今年的 Keynote 内容进行了一个初步预测,聊作存档。等到明…...

鸿蒙中用HarmonyOS SDK应用服务 HarmonyOS5开发一个生活电费的缴纳和查询小程序
一、项目初始化与配置 1. 创建项目 ohpm init harmony/utility-payment-app 2. 配置权限 // module.json5 {"requestPermissions": [{"name": "ohos.permission.INTERNET"},{"name": "ohos.permission.GET_NETWORK_INFO"…...
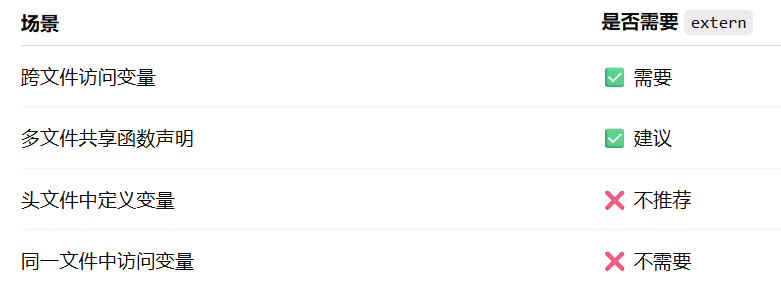
深入解析C++中的extern关键字:跨文件共享变量与函数的终极指南
🚀 C extern 关键字深度解析:跨文件编程的终极指南 📅 更新时间:2025年6月5日 🏷️ 标签:C | extern关键字 | 多文件编程 | 链接与声明 | 现代C 文章目录 前言🔥一、extern 是什么?&…...

Spring AI与Spring Modulith核心技术解析
Spring AI核心架构解析 Spring AI(https://spring.io/projects/spring-ai)作为Spring生态中的AI集成框架,其核心设计理念是通过模块化架构降低AI应用的开发复杂度。与Python生态中的LangChain/LlamaIndex等工具类似,但特别为多语…...

Java 二维码
Java 二维码 **技术:**谷歌 ZXing 实现 首先添加依赖 <!-- 二维码依赖 --><dependency><groupId>com.google.zxing</groupId><artifactId>core</artifactId><version>3.5.1</version></dependency><de…...
嵌入式学习笔记DAY33(网络编程——TCP)
一、网络架构 C/S (client/server 客户端/服务器):由客户端和服务器端两个部分组成。客户端通常是用户使用的应用程序,负责提供用户界面和交互逻辑 ,接收用户输入,向服务器发送请求,并展示服务…...
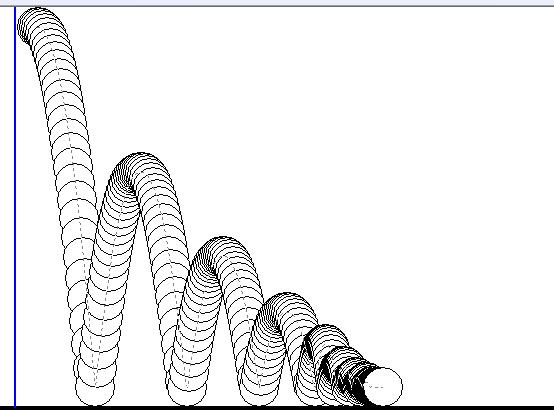
MFC 抛体运动模拟:常见问题解决与界面美化
在 MFC 中开发抛体运动模拟程序时,我们常遇到 轨迹残留、无效刷新、视觉单调、物理逻辑瑕疵 等问题。本文将针对这些痛点,详细解析原因并提供解决方案,同时兼顾界面美化,让模拟效果更专业、更高效。 问题一:历史轨迹与小球残影残留 现象 小球运动后,历史位置的 “残影”…...