STM32_PID通用算法增量式和位置式
STM32_PID通用算法增量式和位置式
前言:
此算法为入门级PID算法,调试好参数后可应用于温度控制、舵机控制、直流电机的转速控制和直流电机的角度控制等等,下面就以温度控制举例
pid.c
#include "pid.h"
#include "sensor.h"
#include "dev_control.h"
#include "usbd_cdc_if.h"pidTypeDef_t heatTemp_pid = {0};
pidPID_t tempPID = {0};void pidInit(void)
{tempPID.KP = 15; //比例常数tempPID.KI = 0; //积分常数tempPID.KD = 0.1; //微分常数heatTemp_pid.PidMode = 0; //使用增量式PIDheatTemp_pid.SetPoint = 0; //设定目标值heatTemp_pid.ActualValue = 0.0; //期望值输出heatTemp_pid.SumError = 0.0; //积分值heatTemp_pid.Error = 0.0; //当前偏差值heatTemp_pid.LastError = 0.0; //上次偏差值heatTemp_pid.PrevError = 0.0; //上上次偏差值heatTemp_pid.Proportion = tempPID.KP; //比例常数heatTemp_pid.Integral = tempPID.KI; //积分常数heatTemp_pid.Derivative = tempPID.KD; //微分常数
}void pidTask(void)//根据系统来计算调用该函数的周期
{if(devTypedef.devHeatAir.devHeatAirEnable == STATE_ENABLE){heatTemp_pid.SetPoint = (float)sensorData.ptcSensorData.ptcSensorData_target;heatTemp_pid.ActualValue = pidComputeCtrl(&heatTemp_pid, (float)sensorData.ptcSensorData.ptcSensorData_float);//¼ÆËã³öPIDÊä³öÖµif(heatTemp_pid.ActualValue < 0) heatTemp_pid.ActualValue = 0;if(heatTemp_pid.ActualValue > 100) heatTemp_pid.ActualValue = 100;devTypedef.devHeatAir.devHeatAirDuty = heatTemp_pid.ActualValue;//作用到控制设备上//调试信息usb_printf("%0.2f,%0.2f,%0.2f\r\n",heatTemp_pid.SetPoint,(float)sensorData.ptcSensorData.ptcSensorData_float,heatTemp_pid.ActualValue);}
}float pidComputeCtrl(pidTypeDef_t *PID, float feedbackValue)
{PID->Error = (float)(PID->SetPoint - feedbackValue); //计算偏差if(PID->PidMode == 1) //增量式PID{PID->ActualValue += (PID->Proportion * (PID->Error - PID->LastError)) //比例环节+ (PID->Integral * PID->Error) //积分环节+ (PID->Derivative * (PID->Error - 2 * PID->LastError + PID->PrevError)); //微分环节PID->PrevError = PID->LastError; //更新历史偏差PID->LastError = PID->Error;}else //位置式PID{PID->SumError += PID->Error;float pid_integral = 0;pid_integral = PID->Integral * PID->SumError; //限积分算法if(pid_integral > 5) pid_integral = 5;PID->ActualValue = (PID->Proportion * PID->Error) //比例环节+ pid_integral //积分环节+ (PID->Derivative * (PID->Error - PID->LastError)); //微分环节PID->LastError = PID->Error;}return (PID->ActualValue); //返回计算后的结果
}
pid.h
#ifndef __PID_H
#define __PID_H
#include "main.h"
#include "log.h"#define PID_TASK_PERIOD 1 //#define PID_LOG_EN 1
#if PID_LOG_EN#define PID_printf(format, ...) printf(RTT_CTRL_TEXT_WHITE format , ##__VA_ARGS__)//"\r\n"#define PID_info(format, ...) printf(RTT_CTRL_TEXT_GREEN"[pid]info:" format , ##__VA_ARGS__)#define PID_debug(format, ...) printf(RTT_CTRL_TEXT_WHITE"[pid]debug:" format , ##__VA_ARGS__)#define PID_warning(format, ...) printf(RTT_CTRL_TEXT_YELLOW"[pid]warning:" format , ##__VA_ARGS__)#define PID_error(format, ...) printf(RTT_CTRL_TEXT_RED"[pid]error:" format ,##__VA_ARGS__)
#else#define PID_printf(format, ...)#define PID_info(format, ...)#define PID_debug(format, ...)#define PID_warning(format, ...)#define PID_error(format, ...)
#endiftypedef struct
{float KP;float KI;float KD;
} pidPID_t;extern pidPID_t pressurePID;
extern pidPID_t tempPID;//PID参数结构体
typedef struct
{float SetPoint; //设定目标值float ActualValue; //期望值输出float SumError; //积分值float Proportion; //比例常数float Integral; //积分常数float Derivative; //微分常数float Error; //当前偏差值float LastError; //上次偏差值float PrevError; //上上次偏差值unsigned int PidMode; //使用PID模式
} pidTypeDef_t;extern pidTypeDef_t heatTemp_pid; //加热系统PID参数结构体extern unsigned char pid_flag;void pidInit(void);
void pidTask(void);
float pidComputeCtrl(pidTypeDef_t *PID, float feedbackValue);#endif相关文章:

STM32_PID通用算法增量式和位置式
STM32_PID通用算法增量式和位置式 前言: 此算法为入门级PID算法,调试好参数后可应用于温度控制、舵机控制、直流电机的转速控制和直流电机的角度控制等等,下面就以温度控制举例 pid.c #include "pid.h" #include "sensor.h&q…...

Spark的数据输入、数据计算、数据输出
PySpark的编程,主要氛围三大步骤:1)数据输入、2)数据处理计算、3)数据输出 1)数据输入:通过SparkContext对象,晚上数据输入 2)数据处理计算:输入数据后得到RDD对象,对RDD…...
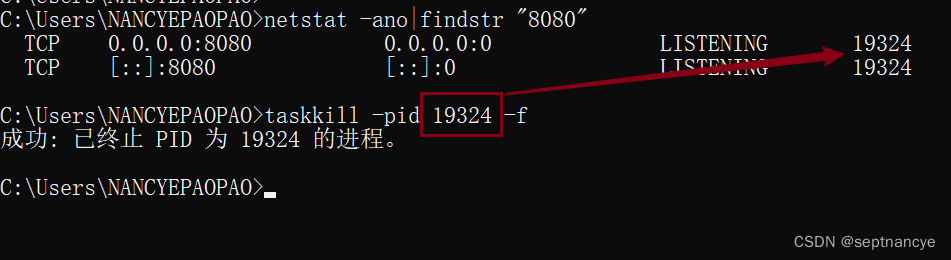
Windows端口号被占用的查看方法及解决办法
Windows端口号被占用的查看方法及解决办法 Error starting ApplicationContext. To display the conditions report re-run your application with debug enabled. 2023-10-14 22:58:32.069 ERROR 6488 --- [ main] o.s.b.d.LoggingFailureAnalysisReporter : ***…...
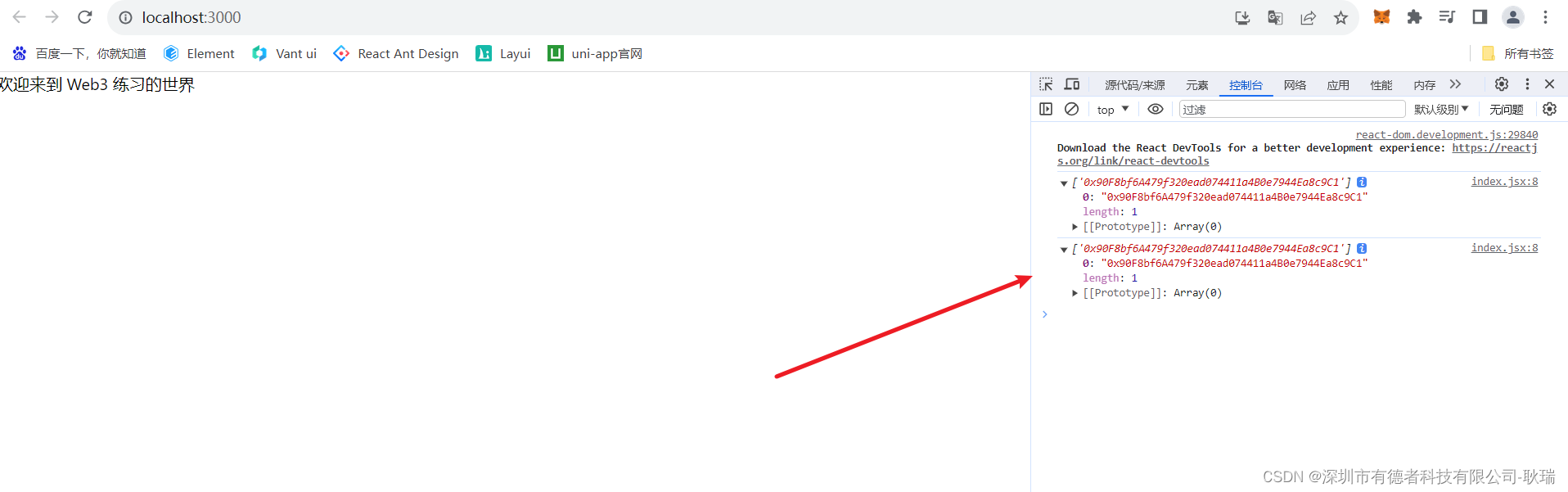
Web3 整理React项目 导入Web3 并获取区块链信息
上文 WEB3 创建React前端Dapp环境并整合solidity项目,融合项目结构便捷前端拿取合约 Abi 我们用react 创建了一个 dapp 项目 并将前后端代码做了个整合 那么 我们就来好好整理一下 我们的前端react的项目结构 我们在 src 目录下创建一个 components 用来存放我们的…...

基于SpringBoot的旅游网站开题报告
一、选题背景 随着旅游业的蓬勃发展和人们对旅游需求的增长,开发一个基于Spring Boot的旅游网站具有重要的意义。传统的旅行社模式逐渐不能满足人们个性化、多样化的旅游需求,因此开发一个在线旅游网站能够为用户提供更加便捷、灵活、个性化的旅游服务&…...
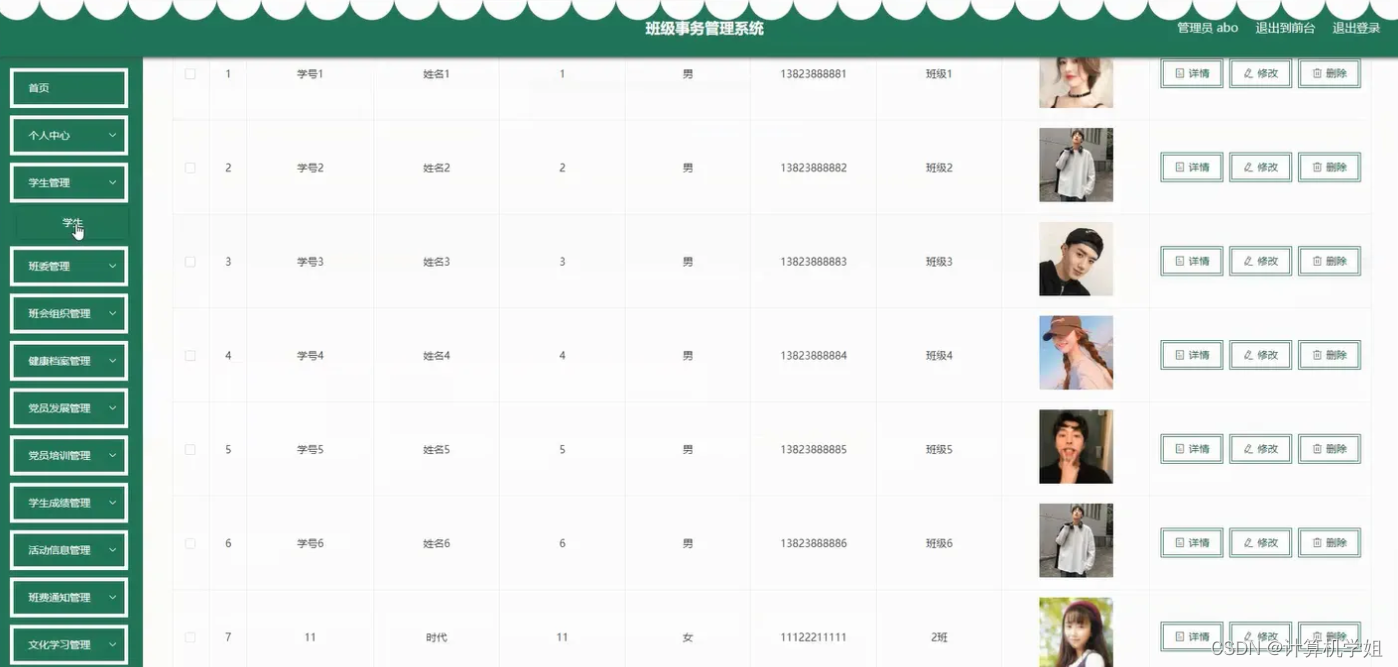
基于SSM的班级事务管理系统
基于SSM的班级事务管理系统 开发语言:Java数据库:MySQL技术:SpringSpringMVCMyBatisVue工具:IDEA/Ecilpse、Navicat、Maven 系统展示 前台界面 登录界面 班委界面 学生界面 管理员界面 摘要 基于SSM(Spring、Spring…...

基于Spring Boot开发的汽车租赁管理系统
文章目录 项目介绍主要功能截图:后台前台部分代码展示设计总结项目获取方式🍅 作者主页:超级无敌暴龙战士塔塔开 🍅 简介:Java领域优质创作者🏆、 简历模板、学习资料、面试题库【关注我,都给你】 🍅文末获取源码联系🍅 项目介绍 基于Spring Boot开发的汽车租赁…...
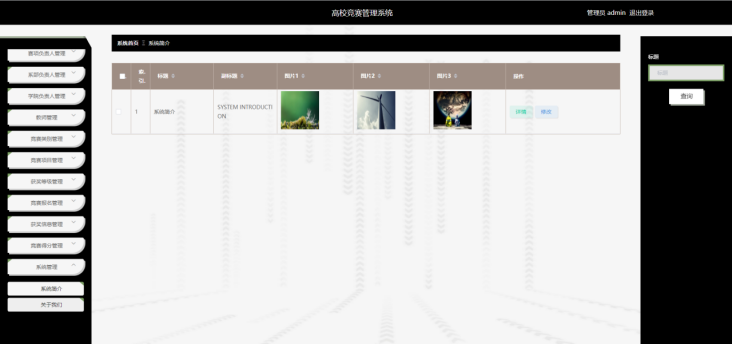
精品基于django的高校竞赛比赛管理系统Python
《[含文档PPT源码等]精品基于django的高校竞赛管理系统》该项目含有源码、文档、PPT、配套开发软件、软件安装教程、项目发布教程等! 软件开发环境及开发工具: 开发语言:python 使用框架:Django 前端技术:JavaScri…...

RustDay04------Exercise[01-10]
1.做题须知 这一题告诉我们可以尝试修改下面的输出,在觉得OK之后删除// I AM NOT DONE注释即可进入下一题 // intro1.rs // About this I AM NOT DONE thing: // We sometimes encourage you to keep trying things on a given exercise, even // after you already figured …...
ARM day9
src/key_it.c #include "key_it.h" #include "led.h" void key_it_config() {//RCC使能GPIOF时钟RCC->MP_AHB4ENSETR | (0x1<<5);//设置PF9 PF7 PF8GPIO输入//PF9GPIOF->MODER & (~(0x3<<18));//PF8GPIOF->MODER & (~(0x3&l…...
【TensorFlow2 之013】TensorFlow-Lite
一、说明 在这篇文章中,我们将展示如何构建计算机视觉模型并准备将其部署在移动和嵌入式设备上。有了这些知识,您就可以真正将脚本部署到日常使用或移动应用程序中。 教程概述: 介绍在 TensorFlow 中构建模型将模型转换为 TensorFlow Lite训练…...
Java基础--阳光总在风雨后,请相信彩虹
1、今日任务 JAVA SE-韩顺平视频教程–30p以上(今天得50p以上因为是基础)计算机基础八股记忆总结刷题(两题)可以先用python 1、SSM ssm->Spring(轻量级的文本开发框架)/SpringMVC(分层的w…...

高级网络调试技巧:使用Charles Proxy捕获和修改HTTP/HTTPS请求
今天我将与大家分享一种强大的网络调试技巧,那就是使用Charles Proxy来捕获和修改HTTP/HTTPS请求。如果您是一位开发人员或者网络调试爱好者,那么这个工具肯定对您有着很大的帮助。接下来,让我们一起来学习如何使用Charles Proxy进行高级网络…...

Discuz大气游戏风格模板/仿lol英雄联盟游戏DZ游戏模板GBK
Discuz大气游戏风格模板,lol英雄联盟游戏模板,DZ游戏娱乐模板GBK。模板名称:lol英雄联盟游戏(m0398_lol) 下载地址:https://bbs.csdn.net/topics/617408069...
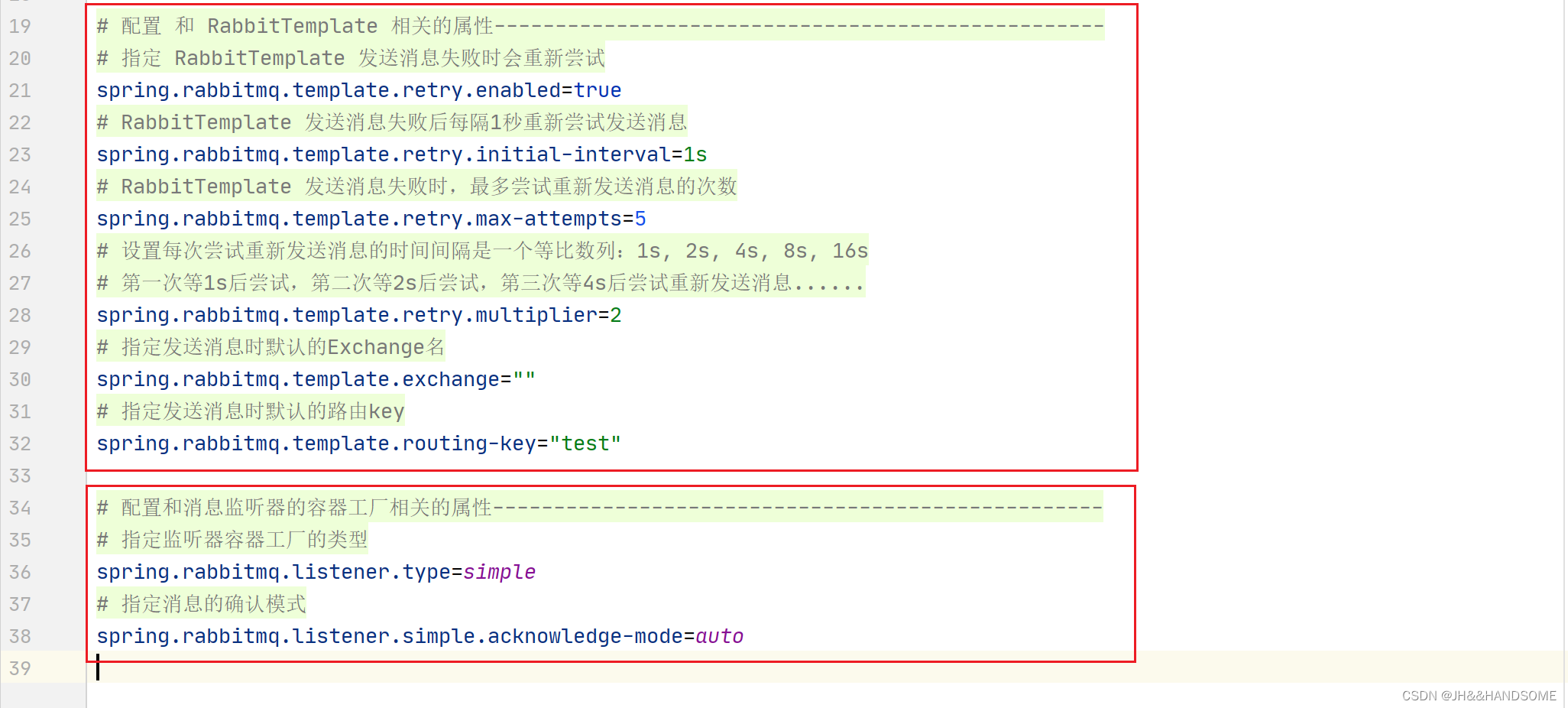
206、SpringBoot 整合 RabbitMQ 的自动配置类 和 对应的属性处理类 的知识点
目录 ★ Spring Boot 为 RabbitMQ 提供的自动配置▲ 自动配置类:RabbitAutoConfiguration▲ 属性处理类:RabbitProperties相关配置 ★ AmqpAdmin的方法★ AmqpTemplate的方法代码演示创建一个springboot的项目。application.properties 配置属性 ★ Spri…...

网络链接失败怀疑是服务器处于非正常状态?如何用本地电脑查看服务器是否正常?
网络链接失败怀疑是服务器处于非正常状态?如何用本地电脑查看服务器是否正常? 网页会出现链接失败,可以实时用cdm大法,cdm可以更好的排查字节数据的返回,可以让我们更好的要检查服务器是否处于正常状态,接下…...

文件操作(打开关闭文件、文件顺序以及随机读写)
文章目录 写在前面1. 文件的打开与关闭1.1 文件指针1.2 文件的打开(fopen)与关闭(fclose)1.2.1 fopen函数1.2.2 fclose函数 2. 文件的顺序读写2.1. fgetc 和 fputc函数2.1.1 fputc函数2.1.2 fgetc函数 2.2 fgets 和 fputs函数2.2.1 fputs函数2.2.2 fgets函数 2.3 fscanf和fprin…...
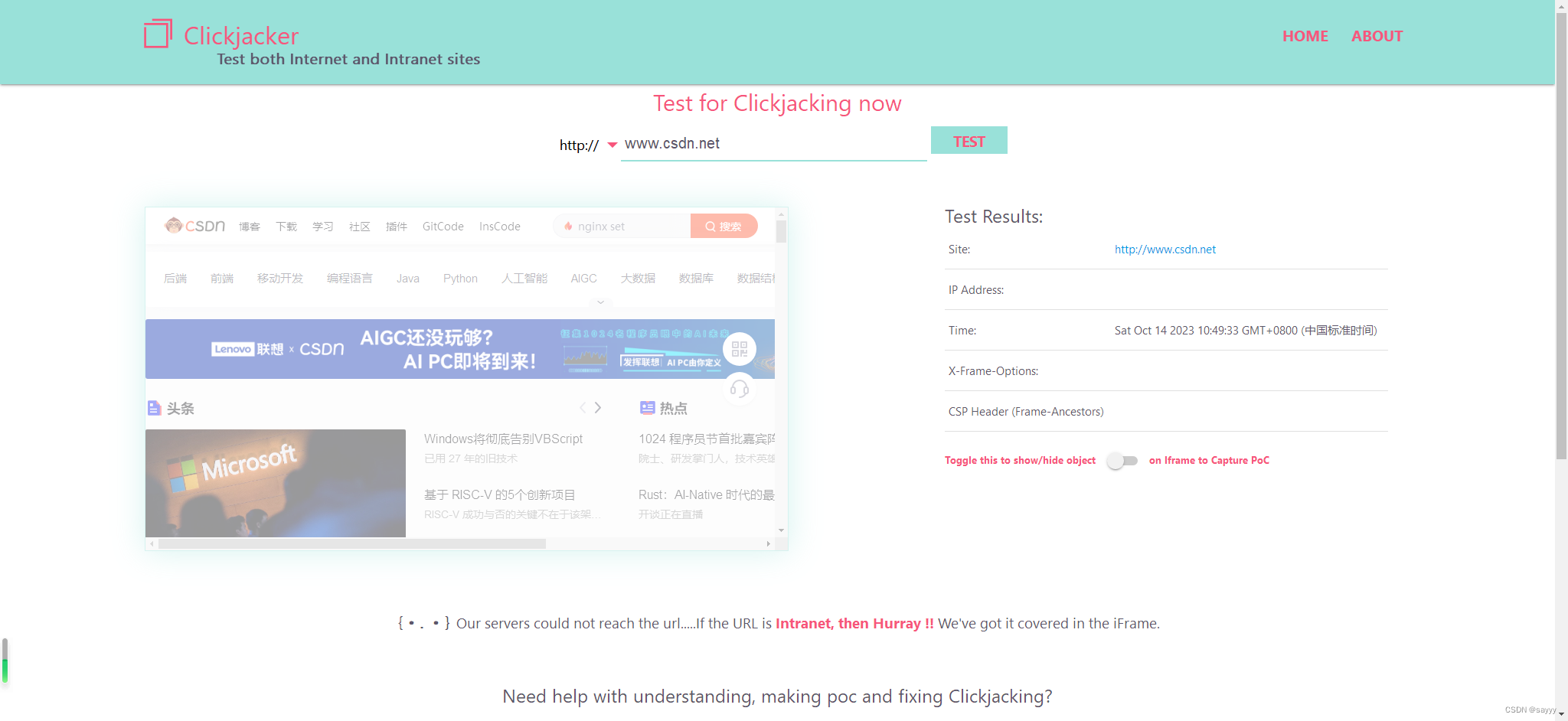
HTTP 响应头 X-Frame-Options
简介 X-Frame-Options HTTP 响应头用来给浏览器一个指示。该指示的作用为:是否允许页面在 <frame>, </iframe> 或者 <object> 中展现。 网站可以使用此功能,来确保自己网站的内容没有被嵌套到别人的网站中去,也从而避免了…...
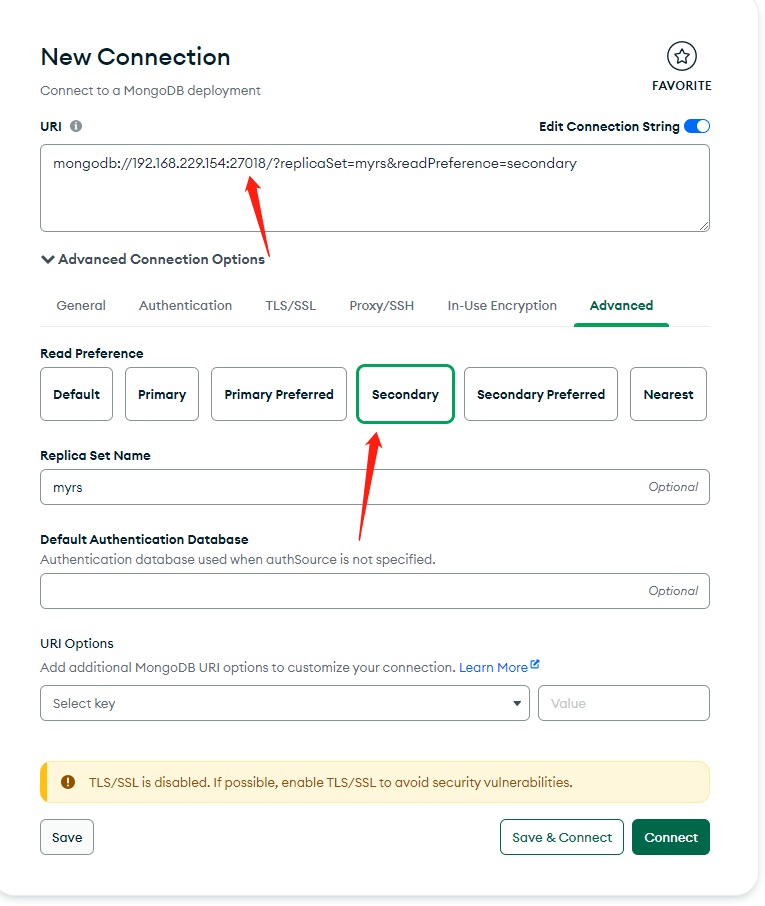
MongoDB 集群配置
一、副本集 Replica Sets 1.1 简介 MongoDB 中的副本集(Replica Set)是一组维护相同数据集的 mongod 服务。 副本集可提供冗余和高可用性,是所有生产部署的基础。 也可以说,副本集类似于有自动故障恢复功能的主从集群。通俗的讲就…...

random生成随机数的灵活运用
random返回的 [0,1) 之间的一个随即小数 思考:请写出获取 a-b 之间的一个随机整数,a,b均为整数,比如 a2 , b7 即返回一个数 x > [2,7]Math.random()*(b-a) 返回的就是 [0,b-a](int)(aMath.random()*(b-a1)) 》 (int)(2Math.random()*6) Ma…...

KubeSphere 容器平台高可用:环境搭建与可视化操作指南
Linux_k8s篇 欢迎来到Linux的世界,看笔记好好学多敲多打,每个人都是大神! 题目:KubeSphere 容器平台高可用:环境搭建与可视化操作指南 版本号: 1.0,0 作者: 老王要学习 日期: 2025.06.05 适用环境: Ubuntu22 文档说…...

挑战杯推荐项目
“人工智能”创意赛 - 智能艺术创作助手:借助大模型技术,开发能根据用户输入的主题、风格等要求,生成绘画、音乐、文学作品等多种形式艺术创作灵感或初稿的应用,帮助艺术家和创意爱好者激发创意、提高创作效率。 - 个性化梦境…...
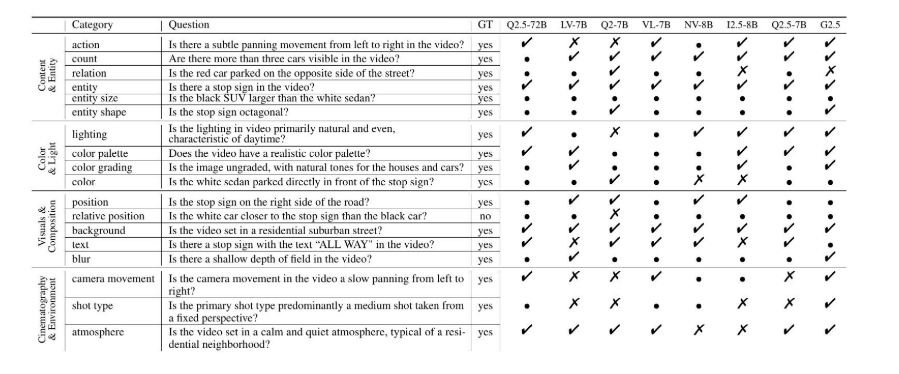
视频字幕质量评估的大规模细粒度基准
大家读完觉得有帮助记得关注和点赞!!! 摘要 视频字幕在文本到视频生成任务中起着至关重要的作用,因为它们的质量直接影响所生成视频的语义连贯性和视觉保真度。尽管大型视觉-语言模型(VLMs)在字幕生成方面…...

新能源汽车智慧充电桩管理方案:新能源充电桩散热问题及消防安全监管方案
随着新能源汽车的快速普及,充电桩作为核心配套设施,其安全性与可靠性备受关注。然而,在高温、高负荷运行环境下,充电桩的散热问题与消防安全隐患日益凸显,成为制约行业发展的关键瓶颈。 如何通过智慧化管理手段优化散…...
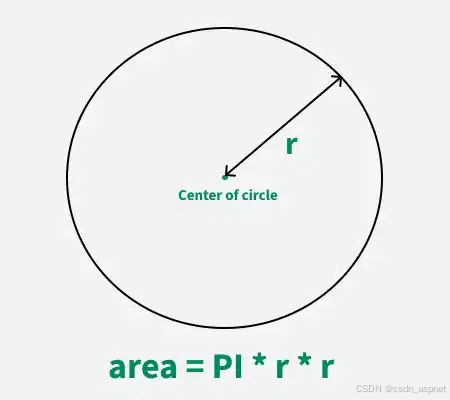
C++ 求圆面积的程序(Program to find area of a circle)
给定半径r,求圆的面积。圆的面积应精确到小数点后5位。 例子: 输入:r 5 输出:78.53982 解释:由于面积 PI * r * r 3.14159265358979323846 * 5 * 5 78.53982,因为我们只保留小数点后 5 位数字。 输…...

如何在最短时间内提升打ctf(web)的水平?
刚刚刷完2遍 bugku 的 web 题,前来答题。 每个人对刷题理解是不同,有的人是看了writeup就等于刷了,有的人是收藏了writeup就等于刷了,有的人是跟着writeup做了一遍就等于刷了,还有的人是独立思考做了一遍就等于刷了。…...
)
Android第十三次面试总结(四大 组件基础)
Activity生命周期和四大启动模式详解 一、Activity 生命周期 Activity 的生命周期由一系列回调方法组成,用于管理其创建、可见性、焦点和销毁过程。以下是核心方法及其调用时机: onCreate() 调用时机:Activity 首次创建时调用。…...
基于SpringBoot在线拍卖系统的设计和实现
摘 要 随着社会的发展,社会的各行各业都在利用信息化时代的优势。计算机的优势和普及使得各种信息系统的开发成为必需。 在线拍卖系统,主要的模块包括管理员;首页、个人中心、用户管理、商品类型管理、拍卖商品管理、历史竞拍管理、竞拍订单…...
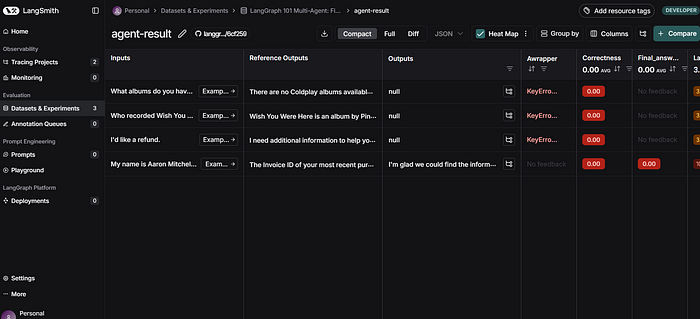
使用LangGraph和LangSmith构建多智能体人工智能系统
现在,通过组合几个较小的子智能体来创建一个强大的人工智能智能体正成为一种趋势。但这也带来了一些挑战,比如减少幻觉、管理对话流程、在测试期间留意智能体的工作方式、允许人工介入以及评估其性能。你需要进行大量的反复试验。 在这篇博客〔原作者&a…...

Python+ZeroMQ实战:智能车辆状态监控与模拟模式自动切换
目录 关键点 技术实现1 技术实现2 摘要: 本文将介绍如何利用Python和ZeroMQ消息队列构建一个智能车辆状态监控系统。系统能够根据时间策略自动切换驾驶模式(自动驾驶、人工驾驶、远程驾驶、主动安全),并通过实时消息推送更新车…...