基于单目的光流法测速
目录
1.简介
2.代码实现
1.简介
基于单目的光流法是一种常见的计算机视觉技术,用于估计图像序列中物体的运动速度。它通过分析连续帧之间的像素变化来推断物体在图像中的移动情况。
背景: 光流法是计算机视觉领域中最早的运动估计方法之一,最早由Horn和Schunck在1981年提出。它基于光流假设,即相邻帧上的像素具有相似的灰度值,且相似的像素在移动过程中会产生相同的位移。光流法不仅可以用于物体的运动跟踪和姿态估计,还可以应用于目标检测、行为分析、视频压缩等领域。
意义: 基于单目的光流法进行速度测量在实际应用中具有广泛的意义,以下是其中一些重要的方面:
-
交通监控和智能交通:通过分析交通摄像头拍摄的连续图像序列,可以估计车辆、行人或其他交通参与者的速度。这对于交通管理、拥堵监测、事故预警等都非常重要。
-
运动分析和姿态估计:光流法可以帮助理解物体的运动行为,如运动目标的速度、加速度以及物体的姿态变化。这对于运动分析、动作捕捉和姿态估计等应用非常有价值,比如在体育训练、动画制作和人机交互中广泛应用。
-
视频增强和稳定:利用光流法可以对图像序列进行运动补偿和稳定,减少图像中的抖动或运动模糊。这对于视频增强、图像合成和虚拟现实等应用非常重要。
-
无人驾驶和机器人导航:光流法可以帮助无人驾驶车辆和机器人估计周围环境中物体的运动状态和速度信息,从而更好地规划路径、避障和控制运动。
总之,基于单目的光流法测速在多个领域具有广泛的应用前景,能够提供有关物体运动速度和行为的关键信息,从而为实时控制、决策和分析提供支持。
2.代码实现
光流法是一种基于图像序列的运动估计方法,其中涉及到的主要函数包括:
-
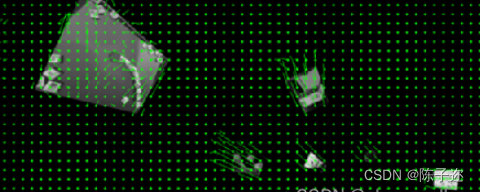
cv2.calcOpticalFlowPyrLK():该函数用于计算稀疏光流。它接受前一帧图像和当前帧图像作为输入,并根据给定的特征点或兴趣区域跟踪这些特征点在两个图像之间的位置变化。函数返回被成功追踪的特征点的新位置以及一个状态值。 -
cv2.calcOpticalFlowFarneback():该函数用于计算稠密光流。它接受前一帧图像和当前帧图像作为输入,并估计整个图像中每个像素点的运动向量。函数返回每个像素点的光流向量值。 -
cv2.goodFeaturesToTrack():该函数用于在图像中检测良好的特征点。它接受输入图像和一些参数,如角点检测方法、特征点数量等,并返回检测到的良好特征点的坐标。 -
cv2.drawOpticalFlow():该函数用于可视化光流结果。它接受一张彩色图像和光流向量作为输入,并在图像上绘制箭头表示运动方向和强度。
这些函数是常见的在OpenCV库中使用的光流算法相关函数,可以帮助实现光流法的运动估计和分析。根据具体的应用场景和需求,您可以选择合适的函数进行使用和调整参数。
像素级测速,真实世界测速需要拿到相机内参
import cv2
import time
import numpy as np
from ours import *# 打开摄像头(也可打开视频文件)cap = cv2.VideoCapture('./10.mp4')# onnx_path = 'yolov5s.onnx'
# model = Yolov5ONNX(onnx_path)# 创建随机颜色向量,用于绘制光流向量
color = np.random.randint(0, 255, (100, 3))# 获取第一帧图像
ret, frame_pre = cap.read()
frame_preGray = cv2.cvtColor(frame_pre, cv2.COLOR_BGR2GRAY)# 设置角点检测参数
feature_params = dict(maxCorners=50, qualityLevel=0.3, minDistance=7, blockSize=7)# 设置光流法参数
lk_params = dict(winSize=(15, 15), maxLevel=2, criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))# 获取第一帧角点
p0 = cv2.goodFeaturesToTrack(frame_preGray, mask=None, **feature_params)# 创建蒙版
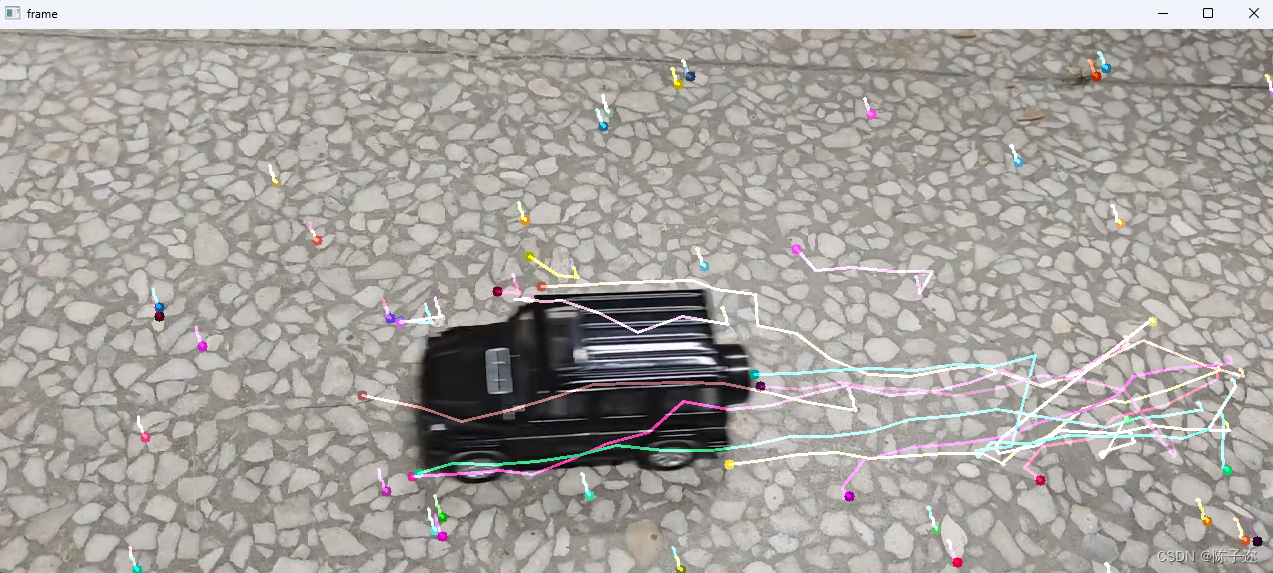
mask = np.zeros_like(frame_pre)while True:# 获取当前帧图像ret, frame = cap.read()img = frame.copy()# or_img, box_coords = model.detect(img)frameGray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)# 使用光流法计算运动向量p1, st, err = cv2.calcOpticalFlowPyrLK(frame_preGray, frameGray, p0, None, **lk_params)# 选择好的特征点good_new = p1[st == 1]good_old = p0[st == 1]# 绘制每个特征点的光流向量for i, (new, old) in enumerate(zip(good_new, good_old)):a, b = new.ravel()c, d = old.ravel()mask = cv2.line(mask, (int(a), int(b)), (int(c), int(d)), color[i].tolist(), 2)frame = cv2.circle(frame, (int(a), int(b)), 5, color[i].tolist(), -1)# 绘制运动速度直方图magnitude, angle = cv2.cartToPolar(good_new[..., 0] - good_old[..., 0], good_new[..., 1] - good_old[..., 1])hist, bins = np.histogram(magnitude, bins=50)bin_mids = (bins[:-1] + bins[1:]) / 2.speed = bin_mids[np.where(hist == np.max(hist))[0][0]]# 将光流运动轨迹叠加到原始图像上img = cv2.add(frame, mask)# 显示结果图像cv2.imshow('frame', img)if cv2.waitKey(1) & 0xFF == ord('q'):break# 更新下一帧的角点frame_preGray = frameGray.copy()p0 = good_new.reshape(-1, 1, 2)# 输出速度信息print("当前速度为: {:.2f} 像素/帧".format(speed))# 释放摄像头并关闭窗口
cap.release()
cv2.destroyAllWindows()
当前速度为: 0.55 像素/帧
当前速度为: 0.82 像素/帧
当前速度为: 0.34 像素/帧
当前速度为: 0.56 像素/帧
当前速度为: 0.22 像素/帧
当前速度为: 1.03 像素/帧
当前速度为: 1.33 像素/帧
相关文章:
基于单目的光流法测速
目录 1.简介 2.代码实现 1.简介 基于单目的光流法是一种常见的计算机视觉技术,用于估计图像序列中物体的运动速度。它通过分析连续帧之间的像素变化来推断物体在图像中的移动情况。 背景: 光流法是计算机视觉领域中最早的运动估计方法之一,…...

排序-算法
文章目录 一、排序的概念及引用1.1 排序概念1.2 排序运用1.3 常见排序算法 二、常见排序算法的实现2.1 插入排序2.1.1 基本思想2.1.2 直接插入排序2.1.3 希尔排序 2.2 选择排序2.2.1 基本思想2.2.2 直接选择排序2.2.3 堆排序 2.3 交换排序2.3.1 冒泡排序2.3.2 快速排序2.3.3 快…...
【特纳斯电子】基于单片机的火灾监测报警系统-实物设计
视频及资料链接:基于单片机的火灾监测报警系统-实物设计 - 电子校园网 (mcude.com) 编号: T0152203M-SW 设计简介: 本设计是基于单片机的火灾监测报警系统,主要实现以下功能: 1.通过OLED显示温度、烟雾、是否有火…...
网络安全就业形势怎么样?
泻药,以下都是我本人的肺腑之言,是答主深耕职场多年,转战数家公司总结周围朋友的从业经验才总结出来的行业真相,真心希望帮助到还没有步入职场的大家,尤其是24届的应届毕业生,多掌握些就业信息就能少走一些…...
【Golang】Go的并发和并行性解释。谁说Go不是并行语言?
偶然发现百度上有很多"师出同门"的"go是并发语言,而不是并行语言"的说法。让我顿感奇怪,"并行"说白了就是对CPU多核的利用,这年头不能利用多核的编译语言还有的混?而且还混的这么好?并且…...
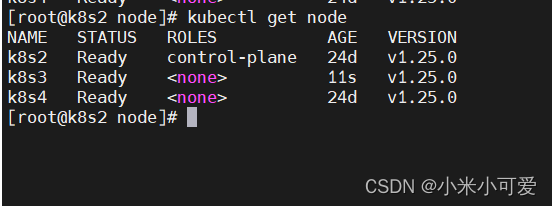
k8s-16 k8s调度
调度器通过 kubernetes 的 watch 机制来发现集群中新创建且尚未被调度到 Node上的 Pod。调度器会将发现的每一个未调度的 Pod 调度到一个合适的 Node 上来运行。 kube-scheduler 是 Kubernetes 集群的默认调度器,并且是集群控制面的一部分如果你真的希望或者有这方面…...

【2023研电赛】全国技术竞赛一等奖:基于FPGA的超低时延激光多媒体终端
该作品参与极术社区组织的研电赛作品征集活动,欢迎同学们投稿,获取作品传播推广,并有丰富礼品哦~ 基于FPGA的超低时延激光多媒体终端 参赛单位:华东师范大学 指导老师:刁盛锡 参赛队员:王泽宇 谢祖炜 秦子淇…...
Annoy vs Milvus:哪个向量数据库更适合您的AI应用?知其然知其所以然
1. Annoy vs Milvus简介 Annoy 和 Milvus 都是用于向量索引和相似度搜索的开源库,它们可以高效地处理大规模的向量数据。 Annoy(Approximate Nearest Neighbors Oh Yeah): Annoy 是一种近似最近邻搜索算法,它通过构…...
)
android 13.0 SystemUI导航栏添加虚拟按键功能(一)
1.概述 在13.0的系统产品开发中,在系统SystemUI的原生系统中默认只有三键导航,想添加其他虚拟按键就需要先在构建导航栏的相关布局中分析结构,然后添加相关的图标xml就可以了,然后添加对应的点击事件,就可以了,接下来先分析第一步关于导航栏的相关布局情况 然后实现功能 …...

内存管理-分页、虚拟地址、虚拟内容、页面置换算法
文章目录 一、5W2H角度分析内存管理What是内存管理Why需要内存管理Who使用内存管理Where内存管理应用When需要内存管理How内存管理工作How much内存管理的成本 二、分页什么是分页分页的原理分页的优缺点分页的应用 三、虚拟地址什么是虚拟地址虚拟地址的作用虚拟地址的转换虚拟…...
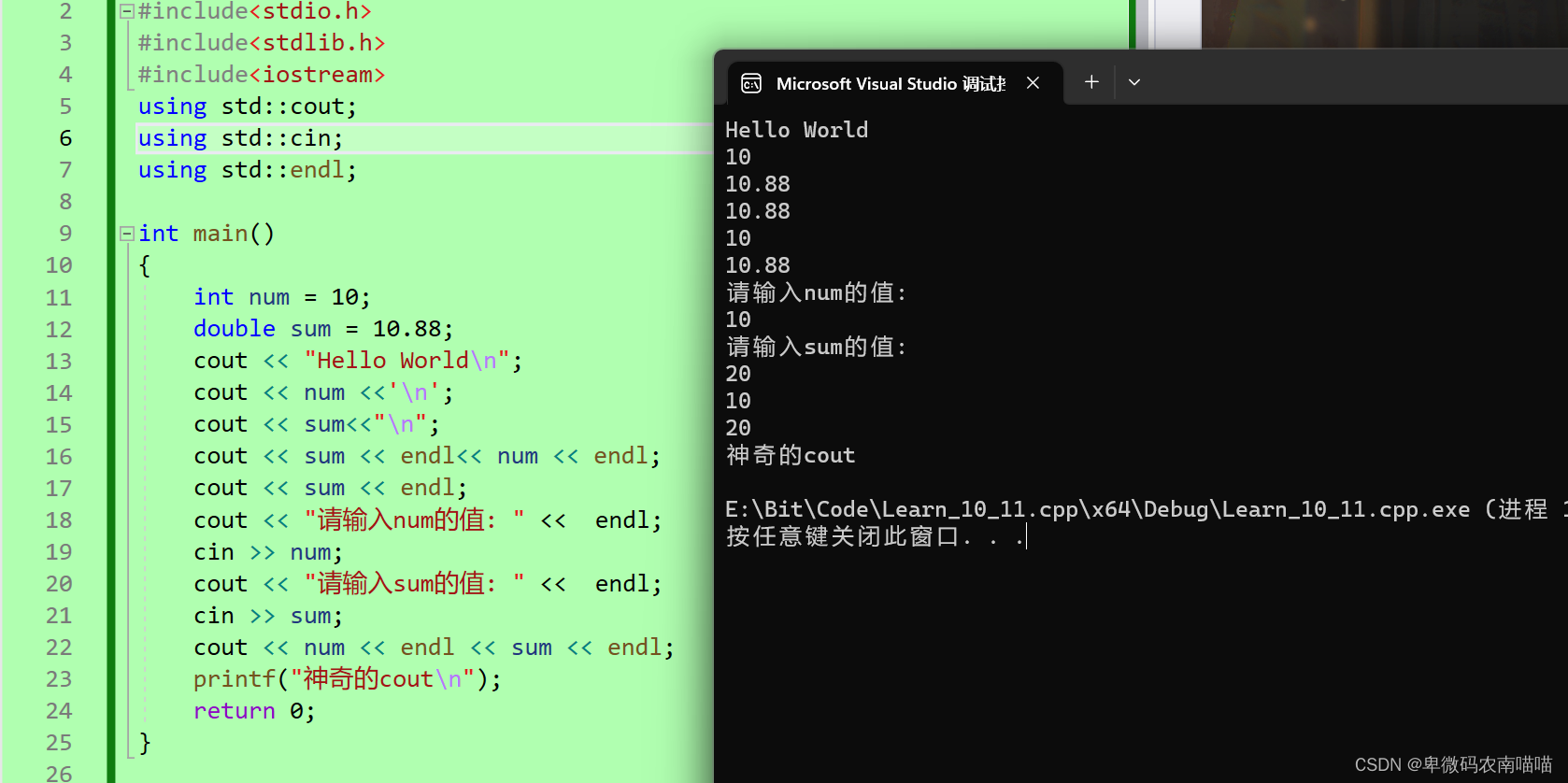
【C++入门】命名空间详解(从零开始,冲击蓝桥杯)
C入门 命名空间 南喵小鸡汤程序员可以让步,却不可以退缩,可以羞涩,却不可以软弱,总之,程序员必须是勇敢的。一 . 命名空间的介绍二.命名空间的实际应用1.为什么要有命名空间我们在使用变量时,通常会为他定义一个名字,在…...
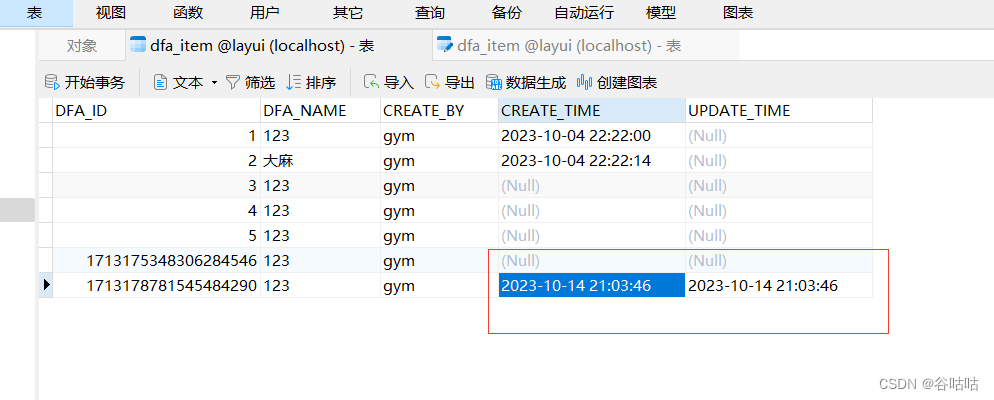
通过代码MyBatis-plus实现对表中createTime和updateTime进行自动更新
通过代码MyBatis-plus实现对表中createTime和updateTime进行自动更新 实现这样的效果可以在数据库中设置,但是我们一般建议在代码里实现, 但是总不能每次insert和update的时候都手写new当前时间 因此推荐使用mybatis-plus 1导入依赖 <dependency&g…...
)
HTML 实时显示本地电脑时间(精确到毫秒)
<!DOCTYPE html> <html> <head><title>实时显示本地电脑时间(精确到毫秒)</title> </head> <body><h1>本地电脑时间(精确到毫秒):</h1><h1 id"clock&q…...

opencv跨平台arm交叉编译之ubuntu
目录 1. 安装交叉编译工具链2. 安装依赖3. 配置工具链3.1 新建build目录3.2 安装cmake-gui3.3 工具链配置界面进行配置3.3.1 终端输入以下命令3.3.2 点击Configure,弹出编译方式选择对话框:3.3.3 点击Next3.3.4 点击Finish3.3.5 点击Configure。3.3.6 Ge…...

Git命令全集
1、克隆代码 查看项目地址 git remote -v直接克隆 git clone url克隆指定分支 git clone -b 分支 git地址RPC failed错误:修改Git的传输字节限制 git config --global http.postBuffer 10485760002、查看分支 查看 git branch -a切换分支 git branch 分支名从指定分支…...
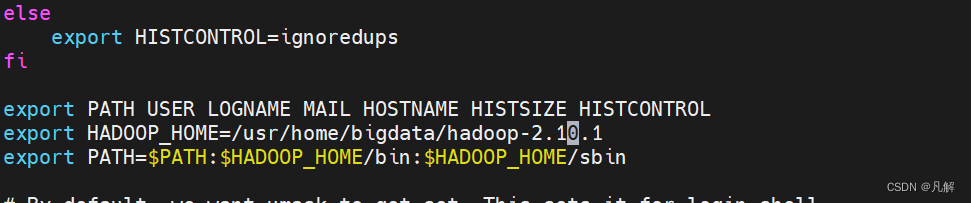
[BigData:Hadoop]:安装部署篇
文章目录 一:机器103设置密钥对免密登录二:机器102设置密钥对免密登录三:机器103安装Hadoop安装包3.1:wget拉取安装Hadoop包3.2:解压移到指定目录3.2.1:解压移动路径异常信息3.2.2:切换指定目录…...

ubuntu 上vscode使用cmake编译运行c++程序
参考:ubuntu 上vscode使用cmake编译运行c程序_vscode ubuntu运行c程序_SCH0的博客-CSDN博客 文章是对官方过程的翻译: Get started with CMake Tools on Linux...

Node.js 新特性 SEA/单文件可执行应用尝鲜
#1 关于 SEA 单文件可执行应用(SEA,Singe Executable Applications),是 Node.js 新版本的特性,最初在 v19.7.0、v18.16.0 加入,并在 v20.x 得到扩展。而上个月发布的全家桶 Bun.js,就自带了 SEA…...

137.只出现一次的数字II
137. 只出现一次的数字 II - 力扣(LeetCode) 给你一个整数数组 nums ,除某个元素仅出现 一次 外,其余每个元素都恰出现 三次 。请你找出并返回那个只出现了一次的元素。 你必须设计并实现线性时间复杂度的算法且使用常数级空间来…...
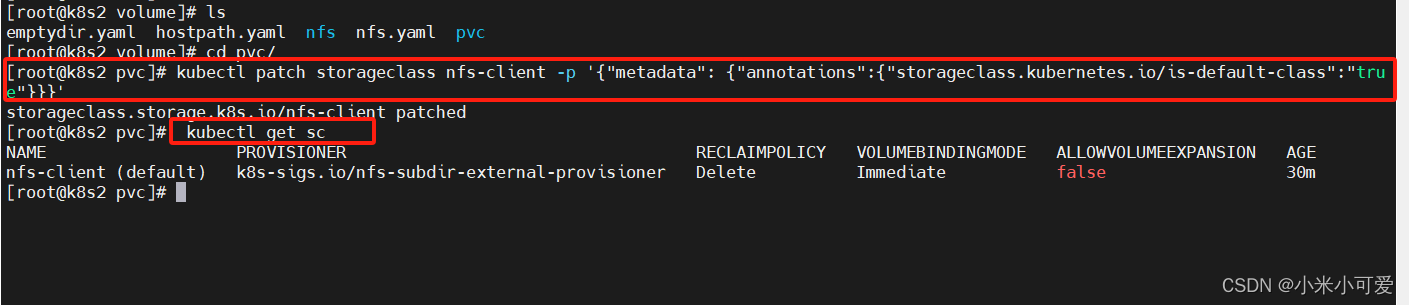
k8s-15 strogeclass
官网: https://github.com/kubernetes-sigs/nfs-subdir-external-provisioner StorageClass提供了一种描述存储类 (class)的方法,不同的cass可能会映射到不同的服务质量等级和备份策略或其他策略等 每个 StorageClass 都包含 provisioner、parameters 和…...

【Python MCP服务器安全开发黄金模板】:20年专家亲授7大零信任实践与3层防御体系
第一章:Python MCP服务器安全开发黄金模板概览Python MCP(Model-Controller-Protocol)服务器是一种面向协议驱动、可扩展性强的后端服务架构,广泛应用于物联网控制平台与微服务网关场景。本章所介绍的“黄金模板”并非通用框架&am…...

不止于超市:用QGIS缓冲区+叠置分析,为你的奶茶店、自习室找个好位置
从奶茶店到自习室:QGIS空间分析赋能小微商业选址决策 走在街头,你是否好奇为什么某些奶茶店总是门庭若市,而几步之隔的同类店铺却冷冷清清?商业选址从来不是简单的"地段好"三个字能概括的。对于资金有限的小微创业者来说…...

基于Kubernetes Operator的MySQL InnoDB Cluster自动化部署实践
1. MySQL InnoDB Cluster与Kubernetes Operator基础 MySQL InnoDB Cluster是MySQL官方提供的高可用数据库解决方案,它基于MySQL Group Replication技术构建,能够实现多节点数据同步和自动故障转移。想象一下,这就像是一个由多个数据库实例组…...

如何将 iQOO 手机备份到Mac
iQOO是vivo旗下的智能手机品牌,以其强劲的性能、出色的游戏体验和极具竞争力的价格而闻名。它深受那些希望以合理价格购买高性能Android手机的用户欢迎。然而,由于缺乏官方的 macOS 管理工具,许多用户发现将 iQOO 手机备份到Mac并非易事。幸运…...

代码驱动图表:重新定义技术可视化的开源工具革命
代码驱动图表:重新定义技术可视化的开源工具革命 【免费下载链接】mermaid-live-editor Edit, preview and share mermaid charts/diagrams. New implementation of the live editor. 项目地址: https://gitcode.com/GitHub_Trending/me/mermaid-live-editor …...

利用快马平台快速构建技能评估系统原型:以skill-vetter为例
利用快马平台快速构建技能评估系统原型:以skill-vetter为例 最近在做一个前端开发技能评估系统,需要快速验证产品原型。传统开发流程从搭建环境到功能实现至少需要1-2周,但通过InsCode(快马)平台的AI辅助和现成模板,我只用了3天就…...

Heritrix3源码深度解析:从CrawlURI到ProcessorChain的执行流程
Heritrix3源码深度解析:从CrawlURI到ProcessorChain的执行流程 【免费下载链接】heritrix3 Heritrix is the Internet Archives open-source, extensible, web-scale, archival-quality web crawler project. 项目地址: https://gitcode.com/gh_mirrors/he/herit…...

Qwen3-0.6B应用案例:如何用它快速生成文案和邮件回复
Qwen3-0.6B应用案例:如何用它快速生成文案和邮件回复 1. 引言:轻量级AI写作助手 在日常工作中,我们经常需要处理大量文字工作:撰写产品介绍、回复客户邮件、编写营销文案等。这些任务虽然不复杂,但耗时耗力。Qwen3-0…...

FlexRay帧格式拆解:从Header到Trailer,手把手教你读懂汽车总线的‘数据包’
FlexRay帧格式实战解析:像拆解网络包一样掌握汽车总线通信 在汽车电子系统开发中,理解总线协议就像网络工程师需要精通TCP/IP一样重要。FlexRay作为高性能车载网络的核心协议,其帧格式设计既体现了汽车电子对确定性的严苛要求,又融…...
Pixel Couplet Gen部署案例:混合云架构(公有云API+私有云模型)方案
Pixel Couplet Gen部署案例:混合云架构(公有云API私有云模型)方案 1. 项目背景与价值 Pixel Couplet Gen是一款融合传统春节文化与现代像素艺术风格的AI春联生成器。该项目基于ModelScope大模型驱动,通过创新的8-bit像素游戏UI设…...