单目3D目标检测——MonoDLE 模型训练 | 模型推理
本文分享 MonoDLE 的模型训练、模型推理、可视化3D检测结果。
模型原理,参考我这篇博客:【论文解读】单目3D目标检测 MonoDLE(CVPR2021)_一颗小树x的博客-CSDN博客
源码地址:https://github.com/xinzhuma/monodle
目录
一、环境搭建
二、准备数据集
三、训练模型
四、模型推理
4.1 使用刚才训练的权重推理
4.2 使用预训练权重推理
五、可视化3D检测结果
一、环境搭建
1.1 需要用到Conda来搭建环境,首先创建一个MonoCon环境;
conda create --name MonoDLE python=3.8
conda activate MonoDLE
1.2 下载代码到本地;
git clone https://github.com/xinzhuma/monodle
cd monocon-pytorch-main
1.3 安装pytorch和对应CUDA,这里以为示例;
conda install pytorch==1.12.0 torchvision==0.13.0 torchaudio==0.12.0 cudatoolkit=11.3 -c pytorch
其他版本安装,或使用pip安装的,参考pytorch官网:Previous PyTorch Versions | PyTorch
1.4 安装MonoCon的依赖库;
cd monodle-main
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
在 pip 命令中使用 -i 参数来指定清华镜像地址,加速安装。
二、准备数据集
官网链接:The KITTI Vision Benchmark Suite
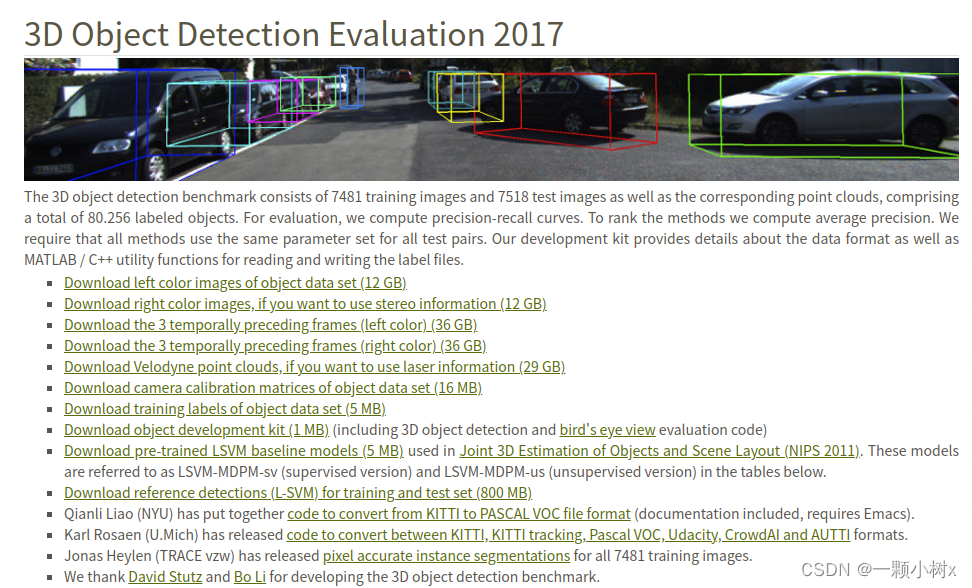
需要下载的文件:
- Download left color images of object data set (12 GB) 这是图片,包括训练集和测试集
- Download camera calibration matrices of object data set (16 MB) 这是相机的标定相关的文件
- Download training labels of object data set (5 MB) 这是图片训练集对应的标签
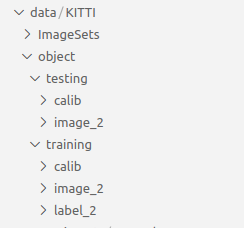
下载后的文件放在dataset目录中,存放的目录结构:
data/KITTI/object │ ├── training │ ├── calib │ │ ├── 000000.txt │ │ ├── 000001.txt │ │ └── ... │ ├── image_2 │ │ ├── 000000.png │ │ ├── 000001.png │ │ └── ... │ └── label_2 │ ├── 000000.txt │ ├── 000001.txt │ └── ... │ └── testing├── calib└── image_2
存放好数据集后,目录结构如下所示:
三、训练模型
训练模型的配置在experiments/example/kitti_example.yaml:
-
batch_size: 16 ,可以根据显存大小调整,默认是16
-
writelist: ['Car'] , 这里是训练那些类别;默认只有Car一种;如果是3种类别:writelist: ['Car', 'Pedestrian', 'Cyclist']
-
数据增强,random_flip、random_crop、scale、shif
-
max_epoch: 140,最大训练轮数
-
gpu_ids: 0,1,使用那些GPU训练;如果只有一张显卡:gpu_ids: 0,0
-
save_frequency: 5=10,间隔多少轮,保存模型权重,默认是10轮保存一次
示例代码如下
random_seed: 444dataset:type: &dataset_type 'KITTI'batch_size: 8 # 16use_3d_center: Trueclass_merging: Falseuse_dontcare: Falsebbox2d_type: 'anno' # 'proj' or 'anno'meanshape: False # use predefined anchor or notwritelist: ['Car', 'Pedestrian', 'Cyclist']random_flip: 0.5random_crop: 0.5scale: 0.4shift: 0.1model:type: 'centernet3d'backbone: 'dla34'neck: 'DLAUp'num_class: 3optimizer:type: 'adam'lr: 0.00125weight_decay: 0.00001lr_scheduler:warmup: True # 5 epoches, cosine warmup, init_lir=0.00001 in defaultdecay_rate: 0.1decay_list: [90, 120]trainer:max_epoch: 140gpu_ids: 0,0 # 0,1save_frequency: 5 # checkpoint save interval (in epoch) 10# resume_model: 'checkpoints/checkpoint_epoch_70.pth'tester:type: *dataset_typemode: single # 'single' or 'all'checkpoint: '../../checkpoints/checkpoint_epoch_5.pth' # for 'single' modecheckpoints_dir: '../../checkpoints' # for 'all' modelthreshold: 0.2 # confidence filter然后执行命令 ,开始训练。
cd experiments/examplepython ../../tools/train_val.py --config kitti_example.yaml训练会打印一些信息
(MonoDLE) root@8677bec7ab74:/guopu/monodle-main/experiments/example# python ../../tools/train_val.py --config kitti_example.yaml
2023-10-15 13:14:09,144 INFO ################### Training ##################
2023-10-15 13:14:09,146 INFO Batch Size: 8
2023-10-15 13:14:09,146 INFO Learning Rate: 0.001250epochs: 8%|█████████▌ | 11/140 [1:23:27<16:47:33, 468.63s/it]
.......
训练中会有模型的验证结果,和保存模型权重
权重:experiments/example/checkpoints/checkpoint_epoch_5.pth
experiments/example/checkpoints/checkpoint_epoch_10.pth
experiments/example/checkpoints/checkpoint_epoch_15.pth
......
experiments/example/checkpoints/checkpoint_epoch_140.pth
日志信息:experiments/example/train.log.20231015_144054
四、模型推理
4.1 使用刚才训练的权重推理
首先修改配置文件experiments/example/kitti_example.yaml
tester:
type: *dataset_type
mode: single # 'single' or 'all'
checkpoint: './checkpoints/checkpoint_epoch_50.pth' # for 'single' mode
checkpoints_dir: '../../checkpoints' # for 'all' model
threshold: 0.2 # confidence filter
然后执行命令,模型推理示例:
python ../../tools/train_val.py --config kitti_example.yaml --e4.2 使用预训练权重推理
首先下载预训练权重:https://drive.google.com/file/d/1jaGdvu_XFn5woX0eJ5I2R6wIcBLVMJV6/view
下载好的权重名称为:checkpoint_epoch_140.pth,新建一个文件夹monocon-pytorch-main/checkpoints/,存放权重
然后修改配置文件experiments/example/kitti_example.yaml
tester:
type: *dataset_type
mode: single # 'single' or 'all'
checkpoint: '../../checkpoints/checkpoint_epoch_140.pth' # for 'single' mode
checkpoints_dir: '../../checkpoints' # for 'all' model
threshold: 0.2 # confidence filter
最后执行命令,模型推理示例:
python ../../tools/train_val.py --config kitti_example.yaml --e会打印信息:
(MonoDLE) root@8677bec7ab74:/guopu/monodle-main/experiments/example# python ../../tools/train_val.py --config kitti_example.yaml --e
2023-10-15 14:12:24,658 INFO ################### Evaluation Only ##################
2023-10-15 14:12:24,658 INFO ==> Loading from checkpoint '../../checkpoints/checkpoint_epoch_140.pth'
2023-10-15 14:12:27,092 INFO ==> Done
Evaluation Progress: 100%|██████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████| 472/472 [03:26<00:00, 2.29it/s]
2023-10-15 14:15:54,147 INFO ==> Saving ...
2023-10-15 14:15:54,649 INFO ==> Loading detections and GTs...
2023-10-15 14:15:55,746 INFO ==> Evaluating (official) ........
2023-10-15 14:16:25,506 INFO Car AP@0.70, 0.70, 0.70:
bbox AP:90.1217, 88.3670, 79.8853
bev AP:31.2712, 24.7619, 23.4836
3d AP:23.7493, 20.7087, 17.9959
aos AP:89.09, 87.18, 78.04
Car AP_R40@0.70, 0.70, 0.70:
bbox AP:95.9642, 91.8784, 84.7531
bev AP:25.8910, 20.8330, 18.1531
3d AP:18.2593, 14.5657, 12.9989
aos AP:94.80, 90.55, 82.54
Car AP@0.70, 0.50, 0.50:
bbox AP:90.1217, 88.3670, 79.8853
bev AP:61.6387, 50.2435, 44.7139
3d AP:57.7730, 44.3736, 42.4333
aos AP:89.09, 87.18, 78.04
Car AP_R40@0.70, 0.50, 0.50:
bbox AP:95.9642, 91.8784, 84.7531
bev AP:61.4324, 47.3653, 41.9808
3d AP:56.0393, 42.8401, 38.6675
aos AP:94.80, 90.55, 82.54
.....
推理完成后,结果存放在experiments/example/outputs/data
五、可视化3D检测结果
由于开源代码,没有可视化推理结果,首先观察 experiments/example/outputs/data 目录的txt文件,以为000002.txt例
Car 0.0 0 1.28 661.70 192.01 701.36 225.01 1.54 1.61 3.64 2.93 2.22 30.01 1.38 0.05
其实生成的结果,和kitii标签格式是一致的。
然后准备kitti的val集 相机标定参数,和图片。这里新建一个vis目录,用于可视化3D检测结果。
在vis目录包括:
dataset 存放相机标定数据、图片、推理结果
save_3d_output 存放可视化图片
kitti_3d_vis.py 可视化运行此代码
kitti_util.py 依赖代码
主代码 kitti_3d_vis.py
# kitti_3d_vis.pyfrom __future__ import print_functionimport os
import sys
import cv2
import random
import os.path
import shutil
from PIL import Image
BASE_DIR = os.path.dirname(os.path.abspath(__file__))
ROOT_DIR = os.path.dirname(BASE_DIR)
sys.path.append(BASE_DIR)
sys.path.append(os.path.join(ROOT_DIR, 'mayavi'))
from kitti_util import *def visualization():import mayavi.mlab as mlabdataset = kitti_object(r'./dataset/')path = r'./dataset/testing/label_2/'Save_Path = r'./save_3d_output/'files = os.listdir(path)for file in files:name = file.split('.')[0]save_path = Save_Path + name + '.png'data_idx = int(name)# Load data from datasetobjects = dataset.get_label_objects(data_idx)img = dataset.get_image(data_idx)img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)calib = dataset.get_calibration(data_idx)print(' ------------ save image with 3D bounding box ------- ')print('name:', name)show_image_with_boxes(img, objects, calib, save_path, True)if __name__=='__main__':visualization()依赖代码 kitti_util.py
# kitti_util.pyfrom __future__ import print_functionimport os
import sys
import cv2
import numpy as np
from PIL import Image
import matplotlib.pyplot as plt
BASE_DIR = os.path.dirname(os.path.abspath(__file__))
ROOT_DIR = os.path.dirname(BASE_DIR)
sys.path.append(os.path.join(ROOT_DIR, 'mayavi'))class kitti_object(object):def __init__(self, root_dir, split='testing'):self.root_dir = root_dirself.split = splitself.split_dir = os.path.join(root_dir, split)if split == 'training':self.num_samples = 7481elif split == 'testing':self.num_samples = 7518else:print('Unknown split: %s' % (split))exit(-1)self.image_dir = os.path.join(self.split_dir, 'image_2')self.calib_dir = os.path.join(self.split_dir, 'calib')self.label_dir = os.path.join(self.split_dir, 'label_2')def __len__(self):return self.num_samplesdef get_image(self, idx):assert(idx<self.num_samples) img_filename = os.path.join(self.image_dir, '%06d.png'%(idx))return load_image(img_filename)def get_calibration(self, idx):assert(idx<self.num_samples) calib_filename = os.path.join(self.calib_dir, '%06d.txt'%(idx))return Calibration(calib_filename)def get_label_objects(self, idx):# assert(idx<self.num_samples and self.split=='training') label_filename = os.path.join(self.label_dir, '%06d.txt'%(idx))return read_label(label_filename)def show_image_with_boxes(img, objects, calib, save_path, show3d=True):''' Show image with 2D bounding boxes '''img1 = np.copy(img) # for 2d bboximg2 = np.copy(img) # for 3d bboxfor obj in objects:if obj.type=='DontCare':continuecv2.rectangle(img1, (int(obj.xmin),int(obj.ymin)), (int(obj.xmax),int(obj.ymax)), (0,255,0), 2) # 画2D框box3d_pts_2d, box3d_pts_3d = compute_box_3d(obj, calib.P) # 获取3D框-图像(8*2)、3D框-相机坐标系(8*3)img2 = draw_projected_box3d(img2, box3d_pts_2d) # 在图像上画3D框if show3d:Image.fromarray(img2).save(save_path) # 保存带有3D框的图像# Image.fromarray(img2).show()else:Image.fromarray(img1).save(save_path) # 保存带有2D框的图像# Image.fromarray(img1).show()class Object3d(object):''' 3d object label '''def __init__(self, label_file_line):data = label_file_line.split(' ')data[1:] = [float(x) for x in data[1:]]# extract label, truncation, occlusionself.type = data[0] # 'Car', 'Pedestrian', ...self.truncation = data[1] # truncated pixel ratio [0..1]self.occlusion = int(data[2]) # 0=visible, 1=partly occluded, 2=fully occluded, 3=unknownself.alpha = data[3] # object observation angle [-pi..pi]# extract 2d bounding box in 0-based coordinatesself.xmin = data[4] # leftself.ymin = data[5] # topself.xmax = data[6] # rightself.ymax = data[7] # bottomself.box2d = np.array([self.xmin,self.ymin,self.xmax,self.ymax])# extract 3d bounding box informationself.h = data[8] # box heightself.w = data[9] # box widthself.l = data[10] # box length (in meters)self.t = (data[11],data[12],data[13]) # location (x,y,z) in camera coord.self.ry = data[14] # yaw angle (around Y-axis in camera coordinates) [-pi..pi]def print_object(self):print('Type, truncation, occlusion, alpha: %s, %d, %d, %f' % \(self.type, self.truncation, self.occlusion, self.alpha))print('2d bbox (x0,y0,x1,y1): %f, %f, %f, %f' % \(self.xmin, self.ymin, self.xmax, self.ymax))print('3d bbox h,w,l: %f, %f, %f' % \(self.h, self.w, self.l))print('3d bbox location, ry: (%f, %f, %f), %f' % \(self.t[0],self.t[1],self.t[2],self.ry))class Calibration(object):''' Calibration matrices and utils3d XYZ in <label>.txt are in rect camera coord.2d box xy are in image2 coordPoints in <lidar>.bin are in Velodyne coord.y_image2 = P^2_rect * x_recty_image2 = P^2_rect * R0_rect * Tr_velo_to_cam * x_velox_ref = Tr_velo_to_cam * x_velox_rect = R0_rect * x_refP^2_rect = [f^2_u, 0, c^2_u, -f^2_u b^2_x;0, f^2_v, c^2_v, -f^2_v b^2_y;0, 0, 1, 0]= K * [1|t]image2 coord:----> x-axis (u)||v y-axis (v)velodyne coord:front x, left y, up zrect/ref camera coord:right x, down y, front zRef (KITTI paper): http://www.cvlibs.net/publications/Geiger2013IJRR.pdfTODO(rqi): do matrix multiplication only once for each projection.'''def __init__(self, calib_filepath, from_video=False):if from_video:calibs = self.read_calib_from_video(calib_filepath)else:calibs = self.read_calib_file(calib_filepath)# Projection matrix from rect camera coord to image2 coordself.P = calibs['P2'] self.P = np.reshape(self.P, [3,4])# Rigid transform from Velodyne coord to reference camera coordself.V2C = calibs['Tr_velo_to_cam']self.V2C = np.reshape(self.V2C, [3,4])self.C2V = inverse_rigid_trans(self.V2C)# Rotation from reference camera coord to rect camera coordself.R0 = calibs['R0_rect']self.R0 = np.reshape(self.R0,[3,3])# Camera intrinsics and extrinsicsself.c_u = self.P[0,2]self.c_v = self.P[1,2]self.f_u = self.P[0,0]self.f_v = self.P[1,1]self.b_x = self.P[0,3]/(-self.f_u) # relative self.b_y = self.P[1,3]/(-self.f_v)def read_calib_file(self, filepath):''' Read in a calibration file and parse into a dictionary.'''data = {}with open(filepath, 'r') as f:for line in f.readlines():line = line.rstrip()if len(line)==0: continuekey, value = line.split(':', 1)# The only non-float values in these files are dates, which# we don't care about anywaytry:data[key] = np.array([float(x) for x in value.split()])except ValueError:passreturn datadef read_calib_from_video(self, calib_root_dir):''' Read calibration for camera 2 from video calib files.there are calib_cam_to_cam and calib_velo_to_cam under the calib_root_dir'''data = {}cam2cam = self.read_calib_file(os.path.join(calib_root_dir, 'calib_cam_to_cam.txt'))velo2cam = self.read_calib_file(os.path.join(calib_root_dir, 'calib_velo_to_cam.txt'))Tr_velo_to_cam = np.zeros((3,4))Tr_velo_to_cam[0:3,0:3] = np.reshape(velo2cam['R'], [3,3])Tr_velo_to_cam[:,3] = velo2cam['T']data['Tr_velo_to_cam'] = np.reshape(Tr_velo_to_cam, [12])data['R0_rect'] = cam2cam['R_rect_00']data['P2'] = cam2cam['P_rect_02']return datadef cart2hom(self, pts_3d):''' Input: nx3 points in CartesianOupput: nx4 points in Homogeneous by pending 1'''n = pts_3d.shape[0]pts_3d_hom = np.hstack((pts_3d, np.ones((n,1))))return pts_3d_hom# =========================== # ------- 3d to 3d ---------- # =========================== def project_velo_to_ref(self, pts_3d_velo):pts_3d_velo = self.cart2hom(pts_3d_velo) # nx4return np.dot(pts_3d_velo, np.transpose(self.V2C))def project_ref_to_velo(self, pts_3d_ref):pts_3d_ref = self.cart2hom(pts_3d_ref) # nx4return np.dot(pts_3d_ref, np.transpose(self.C2V))def project_rect_to_ref(self, pts_3d_rect):''' Input and Output are nx3 points '''return np.transpose(np.dot(np.linalg.inv(self.R0), np.transpose(pts_3d_rect)))def project_ref_to_rect(self, pts_3d_ref):''' Input and Output are nx3 points '''return np.transpose(np.dot(self.R0, np.transpose(pts_3d_ref)))def project_rect_to_velo(self, pts_3d_rect):''' Input: nx3 points in rect camera coord.Output: nx3 points in velodyne coord.''' pts_3d_ref = self.project_rect_to_ref(pts_3d_rect)return self.project_ref_to_velo(pts_3d_ref)def project_velo_to_rect(self, pts_3d_velo):pts_3d_ref = self.project_velo_to_ref(pts_3d_velo)return self.project_ref_to_rect(pts_3d_ref)def corners3d_to_img_boxes(self, corners3d):""":param corners3d: (N, 8, 3) corners in rect coordinate:return: boxes: (None, 4) [x1, y1, x2, y2] in rgb coordinate:return: boxes_corner: (None, 8) [xi, yi] in rgb coordinate"""sample_num = corners3d.shape[0]corners3d_hom = np.concatenate((corners3d, np.ones((sample_num, 8, 1))), axis=2) # (N, 8, 4)img_pts = np.matmul(corners3d_hom, self.P.T) # (N, 8, 3)x, y = img_pts[:, :, 0] / img_pts[:, :, 2], img_pts[:, :, 1] / img_pts[:, :, 2]x1, y1 = np.min(x, axis=1), np.min(y, axis=1)x2, y2 = np.max(x, axis=1), np.max(y, axis=1)boxes = np.concatenate((x1.reshape(-1, 1), y1.reshape(-1, 1), x2.reshape(-1, 1), y2.reshape(-1, 1)), axis=1)boxes_corner = np.concatenate((x.reshape(-1, 8, 1), y.reshape(-1, 8, 1)), axis=2)return boxes, boxes_corner# =========================== # ------- 3d to 2d ---------- # =========================== def project_rect_to_image(self, pts_3d_rect):''' Input: nx3 points in rect camera coord.Output: nx2 points in image2 coord.'''pts_3d_rect = self.cart2hom(pts_3d_rect)pts_2d = np.dot(pts_3d_rect, np.transpose(self.P)) # nx3pts_2d[:,0] /= pts_2d[:,2]pts_2d[:,1] /= pts_2d[:,2]return pts_2d[:,0:2]def project_velo_to_image(self, pts_3d_velo):''' Input: nx3 points in velodyne coord.Output: nx2 points in image2 coord.'''pts_3d_rect = self.project_velo_to_rect(pts_3d_velo)return self.project_rect_to_image(pts_3d_rect)# =========================== # ------- 2d to 3d ---------- # =========================== def project_image_to_rect(self, uv_depth):''' Input: nx3 first two channels are uv, 3rd channelis depth in rect camera coord.Output: nx3 points in rect camera coord.'''n = uv_depth.shape[0]x = ((uv_depth[:,0]-self.c_u)*uv_depth[:,2])/self.f_u + self.b_xy = ((uv_depth[:,1]-self.c_v)*uv_depth[:,2])/self.f_v + self.b_ypts_3d_rect = np.zeros((n,3))pts_3d_rect[:,0] = xpts_3d_rect[:,1] = ypts_3d_rect[:,2] = uv_depth[:,2]return pts_3d_rectdef project_image_to_velo(self, uv_depth):pts_3d_rect = self.project_image_to_rect(uv_depth)return self.project_rect_to_velo(pts_3d_rect)def rotx(t):''' 3D Rotation about the x-axis. '''c = np.cos(t)s = np.sin(t)return np.array([[1, 0, 0],[0, c, -s],[0, s, c]])def roty(t):''' Rotation about the y-axis. '''c = np.cos(t)s = np.sin(t)return np.array([[c, 0, s],[0, 1, 0],[-s, 0, c]])def rotz(t):''' Rotation about the z-axis. '''c = np.cos(t)s = np.sin(t)return np.array([[c, -s, 0],[s, c, 0],[0, 0, 1]])def transform_from_rot_trans(R, t):''' Transforation matrix from rotation matrix and translation vector. '''R = R.reshape(3, 3)t = t.reshape(3, 1)return np.vstack((np.hstack([R, t]), [0, 0, 0, 1]))def inverse_rigid_trans(Tr):''' Inverse a rigid body transform matrix (3x4 as [R|t])[R'|-R't; 0|1]'''inv_Tr = np.zeros_like(Tr) # 3x4inv_Tr[0:3,0:3] = np.transpose(Tr[0:3,0:3])inv_Tr[0:3,3] = np.dot(-np.transpose(Tr[0:3,0:3]), Tr[0:3,3])return inv_Trdef read_label(label_filename):lines = [line.rstrip() for line in open(label_filename)]objects = [Object3d(line) for line in lines]return objectsdef load_image(img_filename):return cv2.imread(img_filename)def load_velo_scan(velo_filename):scan = np.fromfile(velo_filename, dtype=np.float32)scan = scan.reshape((-1, 4))return scandef project_to_image(pts_3d, P):'''将3D坐标点投影到图像平面上,生成2D坐pts_3d是一个nx3的矩阵,包含了待投影的3D坐标点(每行一个点),P是相机的投影矩阵,通常是一个3x4的矩阵。函数返回一个nx2的矩阵,包含了投影到图像平面上的2D坐标点。'''''' Project 3d points to image plane.Usage: pts_2d = projectToImage(pts_3d, P)input: pts_3d: nx3 matrixP: 3x4 projection matrixoutput: pts_2d: nx2 matrixP(3x4) dot pts_3d_extended(4xn) = projected_pts_2d(3xn)=> normalize projected_pts_2d(2xn)<=> pts_3d_extended(nx4) dot P'(4x3) = projected_pts_2d(nx3)=> normalize projected_pts_2d(nx2)'''n = pts_3d.shape[0] # 获取3D点的数量pts_3d_extend = np.hstack((pts_3d, np.ones((n,1)))) # 将每个3D点的坐标扩展为齐次坐标形式(4D),通过在每个点的末尾添加1,创建了一个nx4的矩阵。# print(('pts_3d_extend shape: ', pts_3d_extend.shape))pts_2d = np.dot(pts_3d_extend, np.transpose(P)) # 将扩展的3D坐标点矩阵与投影矩阵P相乘,得到一个nx3的矩阵,其中每一行包含了3D点在图像平面上的投影坐标。每个点的坐标表示为[x, y, z]。pts_2d[:,0] /= pts_2d[:,2] # 将投影坐标中的x坐标除以z坐标,从而获得2D图像上的x坐标。pts_2d[:,1] /= pts_2d[:,2] # 将投影坐标中的y坐标除以z坐标,从而获得2D图像上的y坐标。return pts_2d[:,0:2] # 返回一个nx2的矩阵,其中包含了每个3D点在2D图像上的坐标。def compute_box_3d(obj, P):'''计算对象的3D边界框在图像平面上的投影输入: obj代表一个物体标签信息, P代表相机的投影矩阵-内参。输出: 返回两个值, corners_3d表示3D边界框在 相机坐标系 的8个角点的坐标-3D坐标。corners_2d表示3D边界框在 图像上 的8个角点的坐标-2D坐标。'''# compute rotational matrix around yaw axis# 计算一个绕Y轴旋转的旋转矩阵R,用于将3D坐标从世界坐标系转换到相机坐标系。obj.ry是对象的偏航角R = roty(obj.ry) # 3d bounding box dimensions# 物体实际的长、宽、高l = obj.l;w = obj.w;h = obj.h;# 3d bounding box corners# 存储了3D边界框的8个角点相对于对象中心的坐标。这些坐标定义了3D边界框的形状。x_corners = [l/2,l/2,-l/2,-l/2,l/2,l/2,-l/2,-l/2];y_corners = [0,0,0,0,-h,-h,-h,-h];z_corners = [w/2,-w/2,-w/2,w/2,w/2,-w/2,-w/2,w/2];# rotate and translate 3d bounding box# 1、将3D边界框的角点坐标从对象坐标系转换到相机坐标系。它使用了旋转矩阵Rcorners_3d = np.dot(R, np.vstack([x_corners,y_corners,z_corners]))# 3D边界框的坐标进行平移corners_3d[0,:] = corners_3d[0,:] + obj.t[0];corners_3d[1,:] = corners_3d[1,:] + obj.t[1];corners_3d[2,:] = corners_3d[2,:] + obj.t[2];# 2、检查对象是否在相机前方,因为只有在相机前方的对象才会被绘制。# 如果对象的Z坐标(深度)小于0.1,就意味着对象在相机后方,那么corners_2d将被设置为None,函数将返回None。if np.any(corners_3d[2,:]<0.1):corners_2d = Nonereturn corners_2d, np.transpose(corners_3d)# project the 3d bounding box into the image plane# 3、将相机坐标系下的3D边界框的角点,投影到图像平面上,得到它们在图像上的2D坐标。corners_2d = project_to_image(np.transpose(corners_3d), P);return corners_2d, np.transpose(corners_3d)def compute_orientation_3d(obj, P):''' Takes an object and a projection matrix (P) and projects the 3dobject orientation vector into the image plane.Returns:orientation_2d: (2,2) array in left image coord.orientation_3d: (2,3) array in in rect camera coord.'''# compute rotational matrix around yaw axisR = roty(obj.ry)# orientation in object coordinate systemorientation_3d = np.array([[0.0, obj.l],[0,0],[0,0]])# rotate and translate in camera coordinate system, project in imageorientation_3d = np.dot(R, orientation_3d)orientation_3d[0,:] = orientation_3d[0,:] + obj.t[0]orientation_3d[1,:] = orientation_3d[1,:] + obj.t[1]orientation_3d[2,:] = orientation_3d[2,:] + obj.t[2]# vector behind image plane?if np.any(orientation_3d[2,:]<0.1):orientation_2d = Nonereturn orientation_2d, np.transpose(orientation_3d)# project orientation into the image planeorientation_2d = project_to_image(np.transpose(orientation_3d), P);return orientation_2d, np.transpose(orientation_3d)def draw_projected_box3d(image, qs, color=(0,60,255), thickness=2):'''qs: 包含8个3D边界框角点坐标的数组, 形状为(8, 2)。图像坐标下的3D框, 8个顶点坐标。'''''' Draw 3d bounding box in imageqs: (8,2) array of vertices for the 3d box in following order:1 -------- 0/| /|2 -------- 3 .| | | |. 5 -------- 4|/ |/6 -------- 7'''qs = qs.astype(np.int32) # 将输入的顶点坐标转换为整数类型,以便在图像上绘制。# 这个循环迭代4次,每次处理一个边界框的一条边。for k in range(0,4):# Ref: http://docs.enthought.com/mayavi/mayavi/auto/mlab_helper_functions.html# 定义了要绘制的边的起始点和结束点的索引。在这个循环中,它用于绘制边界框的前四条边。i,j=k,(k+1)%4cv2.line(image, (qs[i,0],qs[i,1]), (qs[j,0],qs[j,1]), color, thickness)# 定义了要绘制的边的起始点和结束点的索引。在这个循环中,它用于绘制边界框的后四条边,与前四条边平行i,j=k+4,(k+1)%4 + 4cv2.line(image, (qs[i,0],qs[i,1]), (qs[j,0],qs[j,1]), color, thickness)# 定义了要绘制的边的起始点和结束点的索引。在这个循环中,它用于绘制连接前四条边和后四条边的边界框的边。i,j=k,k+4cv2.line(image, (qs[i,0],qs[i,1]), (qs[j,0],qs[j,1]), color, thickness)return image运行后会在save_3d_output中保存可视化的图像。
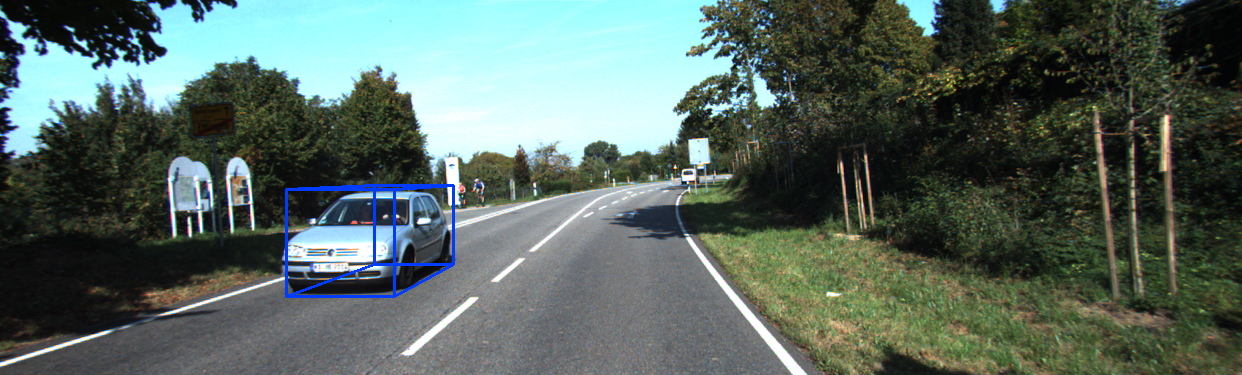
模型推理结果可视化效果:
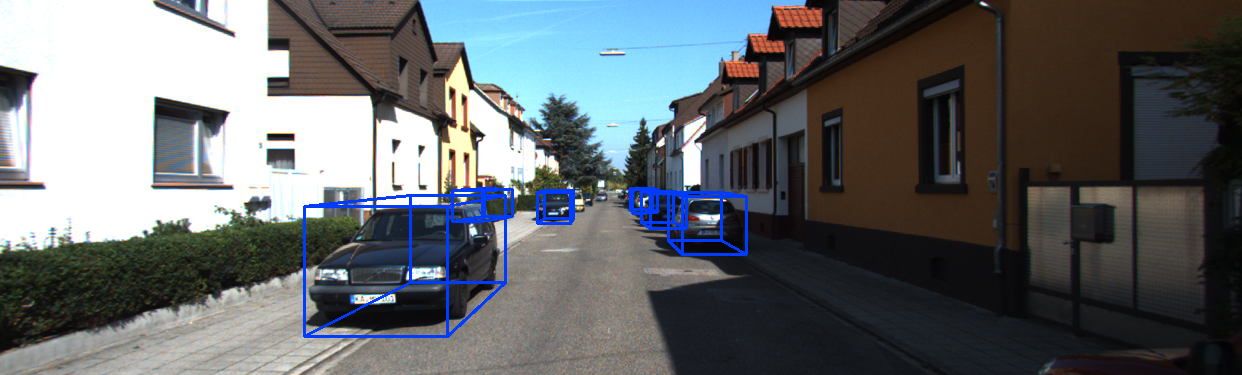
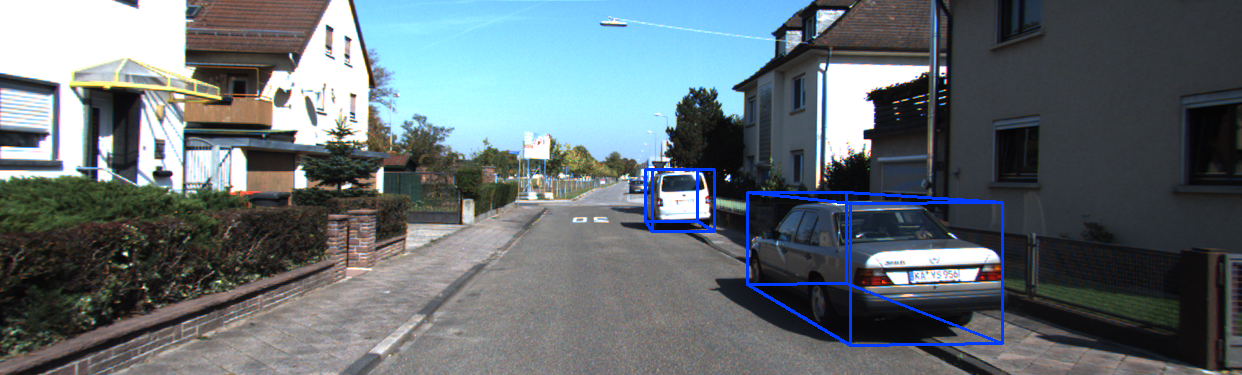
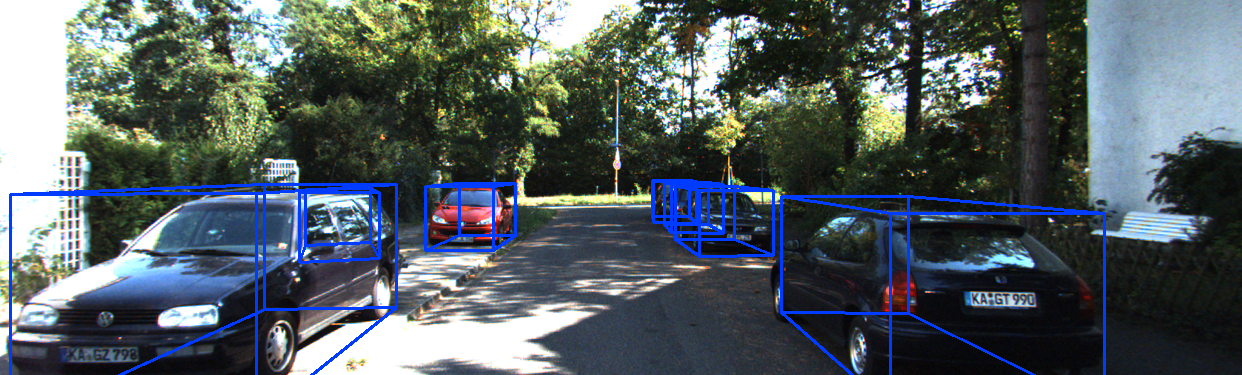
分享完成~
【数据集】单目3D目标检测:
3D目标检测数据集 KITTI(标签格式解析、3D框可视化、点云转图像、BEV鸟瞰图)_kitti标签_一颗小树x的博客-CSDN博客
3D目标检测数据集 DAIR-V2X-V_一颗小树x的博客-CSDN博客
【论文解读】单目3D目标检测:
【论文解读】SMOKE 单目相机 3D目标检测(CVPR2020)_相机smoke-CSDN博客
【论文解读】单目3D目标检测 MonoDLE(CVPR2021)_一颗小树x的博客-CSDN博客
【论文解读】单目3D目标检测 MonoCon(AAAI2022)_一颗小树x的博客-CSDN博客
【实践应用】
单目3D目标检测——SMOKE 环境搭建|模型训练_一颗小树x的博客-CSDN博客
单目3D目标检测——SMOKE 模型推理 | 可视化结果-CSDN博客
单目3D目标检测——MonoCon 模型训练 | 模型推理-CSDN博客
后面计划分享,实时性的单目3D目标检测:MonoFlex、MonoEF、MonoDistillI、GUPNet、DEVIANT等
相关文章:
单目3D目标检测——MonoDLE 模型训练 | 模型推理
本文分享 MonoDLE 的模型训练、模型推理、可视化3D检测结果。 模型原理,参考我这篇博客:【论文解读】单目3D目标检测 MonoDLE(CVPR2021)_一颗小树x的博客-CSDN博客 源码地址:https://github.com/xinzhuma/monodle 目…...

CSS悬停卡片翻转明信片效果源码附注释
运行效果演示: HTML页面代码: <!DOCTYPE html> <html lang="en" > <head>...
使用kaliber与imu_utils进行IMU、相机+IMU联合标定
目录 1 标定工具编译 1.1 IMU标定工具 imu_utils 1.2 相机标定工具 kaliber 2 标定数据录制 3 开始标定 3.1 IMU标定 3.2 相机标定 3.3 相机IMU联合标定 4 将参数填入ORBSLAM的文件中 1 标定工具编译 1.1 IMU标定工具 imu_utils 标定IMU我们使用imu_utils软件进行标定…...

统一观测丨使用 Prometheus 监控 SQL Server 最佳实践
作者:啃唯 SQL Server 简介 SQL Server 是什么? Microsoft SQL Server 是 Microsoft 推出的关系型数据库解决方案,支持企业 IT 环境中的各种事务处理、商业智能和分析应用程序。Microsoft SQL Server 是市场领先的数据库技术之一。 SQL S…...
最短无序连续子数组
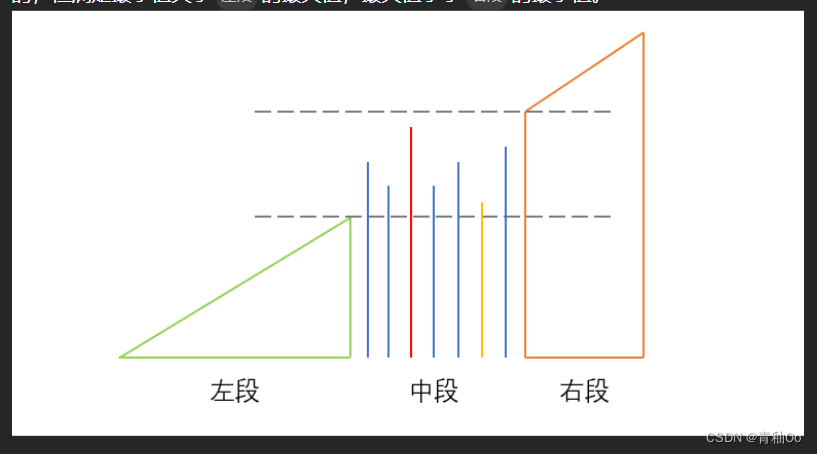
题目链接 最短无序连续子数组 题目描述 注意点 找出符合题意的 最短 子数组,并输出它的长度-100000 < nums[i] < 100000 解答思路 本题的数组可以分为三段,左段中段和右段,如下图所示 观察规律可知,左段元素始终比中段…...
更新 | 持续开源迅为RK3568驱动指南第十二篇-GPIO子系统
《iTOP-RK3568开发板驱动开发指南》更新,本次更新内容对应的是驱动(第十二期_GPIO子系统-全新升级)视频,后续资料会不断更新,不断完善,帮助用户快速入门,大大提升研发速度。 文档教程更新至第十…...
centos7安装erlang23.3.4.11及rabbitmq3.9.16版本
rpm包有系统版本要求,el是Red Hat Enterprise Linux(EL)的缩写。 EL7是Red Hat 7.x,Centos 7.x EL8是Red Hat 8.x, Centos 8.x 所以我们在安装erlang及rabbitmq时需要选择与自己的服务器相对应的rpm包 # rabbitmq的rpm安装包 https://github.com/rabbi…...
VMware和Debian下载
文章目录 ⭐️写在前面的话⭐️一、VMware二、Debain三、建立虚拟机🚀 先看后赞,养成习惯!🚀🚀 先看后赞,养成习惯!🚀 ⭐️写在前面的话⭐️ CSDN主页:程序员好冰 目前在…...
mysql面试题48:MySQL中 Innodb的事务与日志的实现方式
该文章专注于面试,面试只要回答关键点即可,不需要对框架有非常深入的回答,如果你想应付面试,是足够了,抓住关键点 面试官: Innodb的事务与日志的实现方式 以下是InnoDB事务和日志的实现方式的详细说明: 事务日志(Transaction Log): InnoDB使用事务日志来保证事务的…...
数据结构 优先级队列(堆)
数据结构 优先级队列(堆) 文章目录 数据结构 优先级队列(堆)1. 优先级队列1.1 概念 2. 优先级队列的模拟实现2.1 堆的概念2.2 堆的存储方式2.3 堆的创建2.3.1 堆向下调整2.3.2 堆的创建2.3.3 建堆的时间复杂度 2.4 堆的插入与删除2.4.1 堆的插入2.4.2 堆的删除 2.5 用堆模拟实现…...
如何在edge浏览器中给PDF添加文字批注
我用的edge浏览器是目前最新版的(一般自动更新到最新版) 最近,我喜欢用edge浏览器查看PDF,节省电脑资源,快捷且方便。 但edge对PDF的标注种类较少,主要是划线和涂色,文字批注功能尚未出现在工具…...
集成学习的小九九
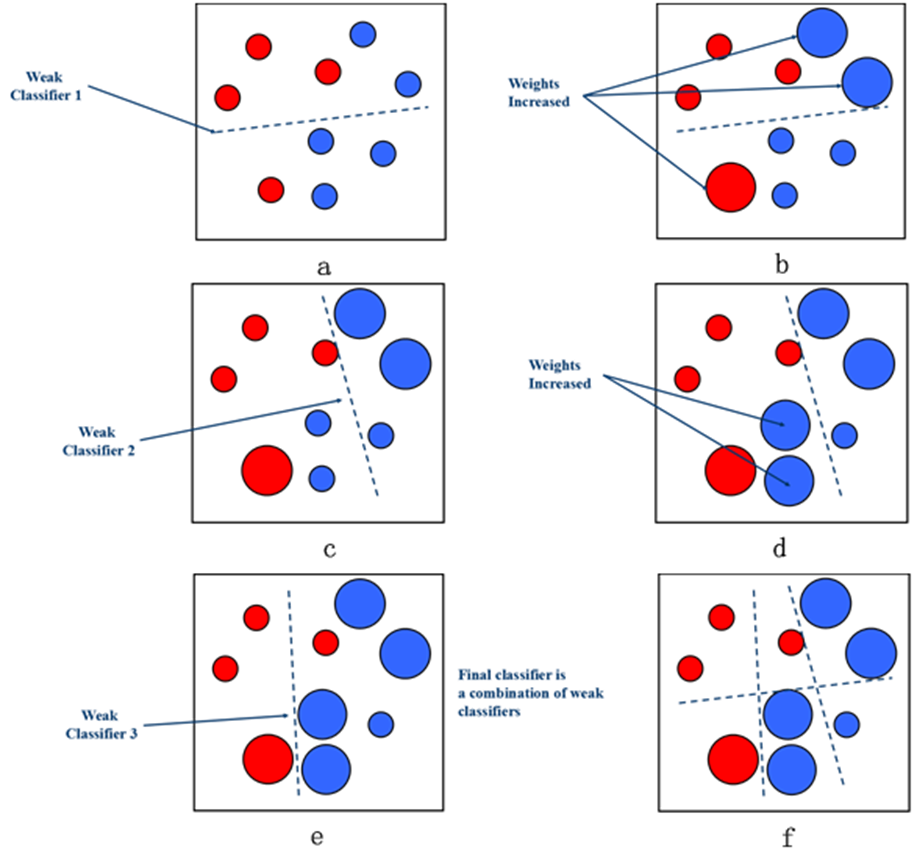
集成学习(Ensemble Learning)是一种机器学习的方法,通过结合多个基本模型的预测结果来进行决策或预测。集成学习的目标是通过组合多个模型的优势,并弥补单个模型的不足,从而提高整体性能。 集成学习的主要策略 在集成…...
深入理解Scrapy
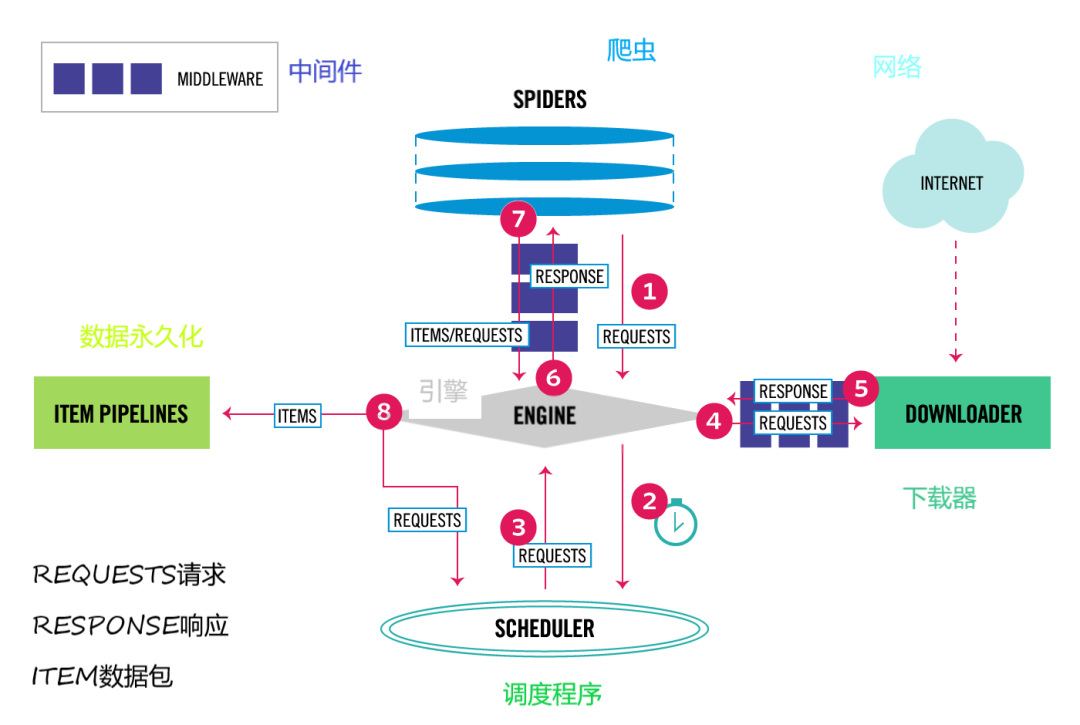
Scrapy是什么 An open source and collaborative framework for extracting the data you need from websites. In a fast, simple, yet extensible way. Scrapy是适用于Python的一个快速、简单、功能强大的web爬虫框架,通常用于抓取web站点并从页面中提取结构化的数…...
想做WMS仓库管理系统,找了好久才找到云表
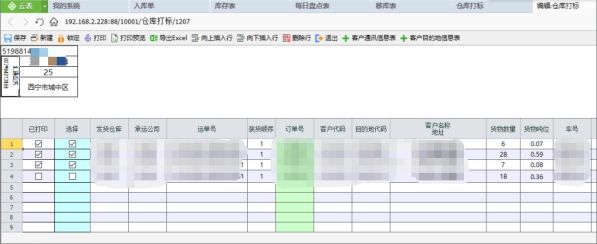
公司内部仓库管理原方式均基于人工电子表格管理方式来实现收发存管理,没有流程化管理,无法保证数据的准确性和及时性,同时现场操作和数据核对会出现不同步的情况,无法提高仓库的运作效率,因此,我们基于云表…...
公司销售个人号如何管理?
微信管理系统可以帮助企业解决哪些问题呢? 一、解决聊天记录监管问题 1.聊天记录的保存,让公司的管理者可以随时查看公司任意销售与客户的聊天记录,不用一个一个员工逐一去看,方便管理; 2.敏感词监控,管理者…...

COLE HERSEE 48408 工业4.0、制造业X和元宇宙
COLE HERSEE 48408 工业4.0、制造业X和元宇宙 需要数据来释放工业4.0的全部潜力——价值链中的所有公司都可以访问大量数据。一个新的互联数据生态系统旨在提供解决方案:制造业x。 在德国联邦经济事务和气候行动部以及BDI、VDMA和ZVEI贸易协会的密切合作下,实施制…...
【Vue基础-数字大屏】加载动漫效果
一、需求描述 当网页正在加载而处于空白页面状态时,可以在该页面上显示加载动画提示。 二、步骤代码 1、全局下载npm install -g json-server npm install -g json-server 2、在src目录下新建文件夹mock,新建文件data.json存放模拟数据 {"one&…...

CSS 样式简写
在CSS中有许多简写的样式,它们被广泛使用。简写最好按照如下顺序进行书写 font font: font-style font-weight font-size/line-height font-familyfont-style italic//斜体 normal//正常字体(默认)font-weight 一般填写数字 400 normal(默认值) 700 bold(默认值)f…...

SQL Server创建数据库
简单创建写法 默认初始大小为5MB,增长速度为2MB create database DBTEST自定义 用户创建的数据库都被存放在sys.database中,每个数据库在表中占一行,name字段存放的数据库的名称,具体字段可以看此博客sys.database系统表详细说明 所以判断…...
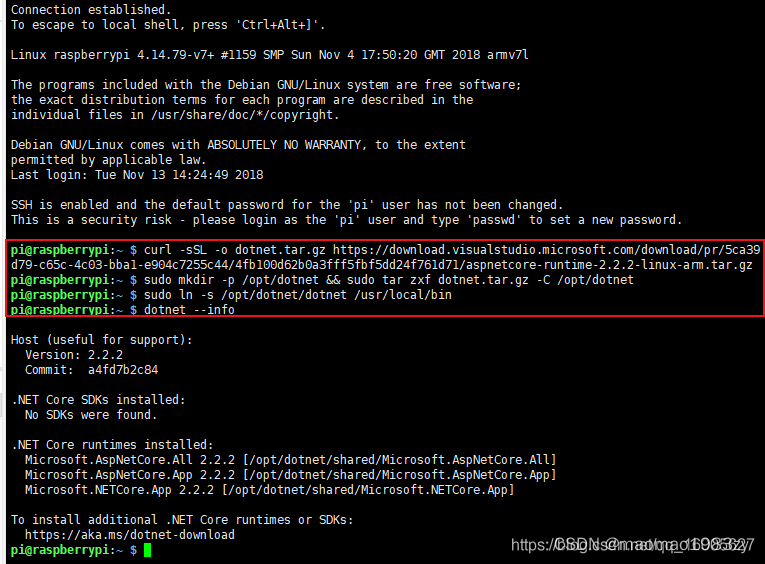
树莓派安装.NET 6.0
首先安装.Net Core依赖(未使用) sudo apt install -y libunwind8 libunwind8-dev gettext libicu-dev liblttng-ust-dev libcurl4 libcurl4-openssl-dev libssl-dev uuid-dev unzip libgdiplus libc6-dev libkrb5-3 需要安装的依赖微软官方文档已经列出…...
)
别再死记硬背PCA公式了!用Python+Open3D实战点云法向量估计(附代码)
用Python实战点云法向量估计:从数学原理到Open3D实现 点云处理是计算机视觉和三维重建中的基础任务,而法向量估计则是理解点云局部几何特征的关键步骤。传统教学中,PCA(主成分分析)往往被简化为一堆数学公式ÿ…...

【24年最新算法】首发CPO-XGBoost回归+交叉验证 基于冠豪猪优化算法-XGBoost多变量回归预测
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。🍎 往期回顾关注个人主页:Matlab科研工作室👇 关注我领取海量matlab电子书和…...

QT窗口特效实战:从透明到异形控件的全方位实现指南
1. 从零开始理解QT窗口特效 第一次接触QT窗口特效时,我被那些酷炫的透明和异形界面深深吸引。记得当时看到Mac OS X的Dock栏那种毛玻璃效果,就特别想在自己的QT应用中实现类似效果。经过多年实战,我发现QT实现这些特效其实比想象中简单得多。…...
)
VS Code终端切换全攻略:从PowerShell到CMD的保姆级教程(含常见问题解决)
VS Code终端切换全攻略:从PowerShell到CMD的保姆级教程(含常见问题解决) 在开发者的日常工作中,终端是不可或缺的工具。VS Code作为最受欢迎的代码编辑器之一,其内置终端功能强大且高度可定制。然而,许多开…...

手把手教你用R玩转MSigDB:从数据库下载、基因集构建到GSEA/GSVA完整流程
手把手教你用R玩转MSigDB:从数据库下载、基因集构建到GSEA/GSVA完整流程 如果你正在寻找一个权威的基因集数据库来支持你的转录组功能分析,MSigDB(Molecular Signatures Database)无疑是首选。作为Broad研究所维护的核心资源&…...

从零开始手搓一个xv6内核页表:跟着MIT 6.S081源码一步步理解虚拟内存初始化
从零构建xv6内核页表:深入解析RISC-V虚拟内存初始化实战 在MIT 6.S081操作系统的学习过程中,xv6作为教学用精简内核,其虚拟内存实现是理解现代计算机内存管理的关键。本文将带您从第一行代码开始,完整复现xv6内核页表的构建过程&…...

Claude Code 用了半年才发现,原来上下文烧没了自己根本不知道!
点击上方卡片关注我设置星标 学习更多AI出海知识用 Claude Code 最怕什么?不是它写错代码,那改改就好。最怕的是写着写着突然质量暴跌,前面说好的逻辑它不认了,该记住的上下文全忘了,然后你反应过来:上下文…...

【AI重塑科研】无需通读全文,三步教你用大模型高效产出文献综述
1. 为什么你需要AI辅助文献综述? 每次打开文献库看到上百篇待读论文就头皮发麻?我完全理解这种感受。去年准备开题报告时,导师要求我两周内完成50篇核心文献的综述,当时差点崩溃。直到我发现用大模型处理文献可以节省90%的时间&am…...

PromptTemplate和ChatPromptTemplate的区别是什么呢?
我用最简单、最直白、一看就懂的方式给你讲清楚: PromptTemplate 和 ChatPromptTemplate 的真正区别 一句话总结 PromptTemplate 生成一段普通字符串 给补全模型/简单模型用ChatPromptTemplate 生成一整段聊天对话格式 给**聊天模型(ChatGLM、Qwen、GP…...

Doris从入门到上天系列第六篇:Doris中修改表的操作
一:修改表使用 ALTER TABLE 命令可以对表进行修改,包括 partition 、rollup、schemachange、rename 和 index 五种。语法:ALTER TABLE [database.]table alter_clause1[, alter_clause2, ...];alter_clause 分为 partition 、rollup、schema …...