FPGA project : flash_continue_write
本实验学习了通过spi通信协议,驱动flash;完成连续写操作。
连续写:
本质上还是页编程指令,两种连续写的方式:
1,每次只写1byte的数据。
2,每次写满1页数据,计算剩余数据够不够写满1页,并计算地址。
本实验采取方案一。
模块框图:

状态机:

时序图:

代码:
只放spi模块。
module spi (input wire sys_clk ,input wire sys_rst_n ,input wire key_flag ,input wire miso ,output reg cs_n ,output reg sck ,output reg mosi ,output reg po_flag ,output wire [7:0] po_data
);// localparam define 一般状态机的状态定义用局部参数就可以。localparam IDLE = 4'b0001 ,INSTRUCT = 4'b0010 ,READ = 4'b0100 ,SEND = 4'b1000 ;// parameter define 指令,计数器最大值,用全局参数定义。parameter COMD_REA = 8'h03 , // comd_readADDR_SEC = 8'h00 , // address_secter 扇区地址ADDR_PAG = 8'h00 , // address_page 页地址(行地址)ADDR_BYT = 8'hc8 , // assress_byte 字节地址NUM_COMD = 4'd4 ; // 用来记录在指令状态传递指令和地址byte数量parameter CNT_MAX_BYTE = 11'd260 , // 4 + 要读出的数据。例如: 4 + 256CNT_MAX_SEND = 20'd53000 ;// reg signal define reg [3:0] state_c ;reg [3:0] state_n ;reg cnt_20_ns ;reg [2:0] cnt_bit ;reg [10:0] cnt_byte ;reg flag_b ; // flag_bytereg flagBreg ;reg flag_R_S ; // flag_bytereg flag_RSr ;reg [7:0] datInFifo ; // data_in_fiforeg flag_data ; // flag_data 采样标志信号reg flaInFifo ; // flag_in_fiforeg [19:0] cnt_send ; // uart_tx模块发送1byte数据的等待时间。reg flaSenEnd ; // 计数器cnt_send计数到CNT_MAX_SEND - 2 拉高一个时钟周期,reg flag_out_fifo_reg ;// wire signal definewire empty ;wire full ;wire flaOutFif ; // flag_out_fifo wire [9:0] usedw ; // fifo中存储的数据量 wire IDLEtoINSTRUCT ;wire INSTRUCTto_READ ;wire READtoSEND ;wire SENDtoIDLE ;
/**********************************************************************/// // reg signal describe /*******状态机采用三段式描述*******/// reg [3:0] state_c ;// reg [3:0] state_n ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) state_c <= IDLE ;else state_c <= state_n ;endalways @(*) begincase (state_c)IDLE : if(IDLEtoINSTRUCT)state_n <= INSTRUCT ;else state_n <= IDLE ;INSTRUCT : if(INSTRUCTto_READ)state_n <= READ ;else state_n <= INSTRUCT ;READ : if(READtoSEND)state_n <= SEND ;else state_n <= READ ;SEND : if(SENDtoIDLE)state_n <= IDLE ;else state_n <= SEND ;default: state_n <= IDLE ;endcaseendassign IDLEtoINSTRUCT = (state_c == IDLE ) && (key_flag) ;assign INSTRUCTto_READ = (state_c == INSTRUCT) && (flagBreg) ; // 指令的的最后1byte发送完毕assign READtoSEND = (state_c == READ ) && (flag_RSr) ; // 读完想要的最后1byteassign SENDtoIDLE = (state_c == SEND ) && (flaSenEnd && empty) ;// reg cnt_20_ns ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)cnt_20_ns <= 1'b0 ;else if(state_c == INSTRUCT || state_c == READ)cnt_20_ns <= cnt_20_ns + 1'b1 ;else if(state_c != INSTRUCT || state_c != READ)cnt_20_ns <= 1'b0 ;else cnt_20_ns <= 1'b0 ;end// reg [2:0] cnt_bit ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)cnt_bit <=3'd0 ;elsecase (state_c)IDLE : cnt_bit <=3'd0 ;INSTRUCT: if(!cnt_20_ns && sck && cnt_bit == 7) cnt_bit <= 3'd0 ;else if(!cnt_20_ns && sck)cnt_bit <= cnt_bit + 1'b1 ;READ : if(!cnt_20_ns && sck && cnt_bit == 7) cnt_bit <= 3'd0 ;else if(!cnt_20_ns && sck)cnt_bit <= cnt_bit + 1'b1 ;SEND : cnt_bit <=3'd0 ;default : cnt_bit <=3'd0 ; endcaseend// reg [10:0] cnt_byte ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)cnt_byte <= 4'd0 ;else if(cnt_bit == 7 && cnt_byte == CNT_MAX_BYTE - 1 && !cnt_20_ns && sck)cnt_byte <= 4'd0 ;else if(cnt_bit == 7 && !cnt_20_ns && sck)cnt_byte <= cnt_byte + 1'b1 ;else cnt_byte <= cnt_byte ;end// reg flag_R_S ;// reg flag_b ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) beginflag_b <= 1'b0 ;flag_R_S <= 1'b0 ;endelsecase (state_c)IDLE : beginflag_b <= 1'b0 ;flag_R_S <= 1'b0 ;end INSTRUCT: begin if((cnt_byte == NUM_COMD - 1) && (cnt_bit == 7) && !cnt_20_ns && sck)flag_b <= 1'b1 ;else flag_b <= flag_b ;flag_R_S <= 1'b0 ;endREAD : beginif(cnt_byte == NUM_COMD)flag_R_S <= 1'b0 ;else if((cnt_byte == CNT_MAX_BYTE - 1) && (cnt_bit == 7) && !cnt_20_ns && sck)flag_R_S <= 1'b1 ;flag_b <= 1'b0 ;endSEND : beginflag_b <= 1'b0 ;flag_R_S <= 1'b0 ;end default : beginflag_b <= 1'b0 ;flag_R_S <= 1'b0 ;end endcase end// reg flagBreg ;// reg flag_RSr ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)flagBreg <= 1'b0 ;else flagBreg <= flag_b ;endalways @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)flag_RSr <= 1'b0 ;else flag_RSr <= flag_R_S ;end// reg [7:0] datInFifo ; // data_in_fifoalways @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) datInFifo <= 1'b0 ;else if(flag_data)datInFifo <= {datInFifo[6:0],miso}; // 读flash中数据,先传的低位{miso,datInFifo[7:1]}。else datInFifo <= datInFifo ;end// reg flag_data ; // flag_data 采样标志信号always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)flag_data <= 1'b0 ;else if(state_c == READ) beginif(cnt_20_ns && !sck)flag_data <= 1'b1 ;else flag_data <= 1'b0 ;end else beginflag_data <= 1'b0 ;endend// reg flaInFifo ; // flag_in_fifoalways @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)flaInFifo <= 1'b0 ;else if(state_c == READ && cnt_bit == 7 && flag_data)flaInFifo <= 1'b1 ;else flaInFifo <= 1'b0 ;end// reg [19:0] cnt_send ; // uart_tx模块发送1byte数据的等待时间。always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) cnt_send <= 20'd0 ;else if(state_c == SEND) beginif(cnt_send == CNT_MAX_SEND - 1) cnt_send <= 20'd0 ;else cnt_send <= cnt_send + 1'b1 ;endelse cnt_send <= 20'd0 ;end// reg flag_out_fifo_reg ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)flag_out_fifo_reg <= 1'b0 ;else if(flaSenEnd && !empty)flag_out_fifo_reg <= 1'b1 ;else flag_out_fifo_reg <= 1'b0 ;end// reg flaSenEnd ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) flaSenEnd <= 1'b0 ;else if(cnt_send == CNT_MAX_SEND - 2)flaSenEnd <= 1'b1 ;else flaSenEnd <= 1'b0 ;end// output signal describe// cs_n ,always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)cs_n <= 1'b1 ;else case (state_c)IDLE : if(key_flag)cs_n <= 1'b0 ;else cs_n <= cs_n ;INSTRUCT: cs_n <= cs_n ;READ : cs_n <= cs_n ;SEND : cs_n <= 1'b1 ;default : cs_n <= 1'b1 ;endcaseend// sck ,always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) sck <= 1'b0 ;else case (state_c)IDLE : sck <= 1'b0 ; INSTRUCT: if(cnt_20_ns)sck <= ~sck ;else sck <= sck ;READ : if(cnt_20_ns)sck <= ~sck ;else sck <= sck ;SEND : sck <= 1'b0 ; default : sck <= 1'b0 ; endcaseend// mosi ,always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) beginmosi <= 1'b0 ;end else begincase (state_c)IDLE : mosi <= 1'b0 ;INSTRUCT: case (cnt_byte)0 : if(cnt_bit == 0)mosi <= COMD_REA[7] ;else if(cnt_20_ns && sck)mosi <= COMD_REA[7 - cnt_bit] ;else mosi <= mosi ;1 : if(cnt_bit == 0)mosi <= ADDR_SEC[7] ;else if(cnt_20_ns && sck)mosi <= ADDR_SEC[7 - cnt_bit] ;else mosi <= mosi ;2 : if(cnt_bit == 0)mosi <= ADDR_PAG[7] ;else if(cnt_20_ns && sck)mosi <= ADDR_PAG[7 - cnt_bit] ;else mosi <= mosi ;3 : if(cnt_bit == 0)mosi <= ADDR_BYT[7] ;else if(cnt_20_ns && sck)mosi <= ADDR_BYT[7 - cnt_bit] ;else mosi <= mosi ;default : mosi <= 1'b0 ;endcaseREAD : mosi <= 1'b0 ;SEND : mosi <= 1'b0 ;default : mosi <= 1'b0 ;endcaseendend// po_flag ,always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)po_flag <= 1'b0 ;else po_flag <= flag_out_fifo_reg ;end// wire [7:0] po_data ;// 直接连接到fifo的输出端口。 // */
/***********************例化FIFO***************************************/assign flaOutFif = flag_out_fifo_reg ;
fifo_1024x8 fifo_1024x8_inst(.clock ( sys_clk ) ,.data ( datInFifo ) ,.rdreq ( flaOutFif ) ,.wrreq ( flaInFifo ) ,.empty ( empty ) ,.full ( full ) ,.q ( po_data ) ,.usedw ( usedw )
);endmodule仿真波形:
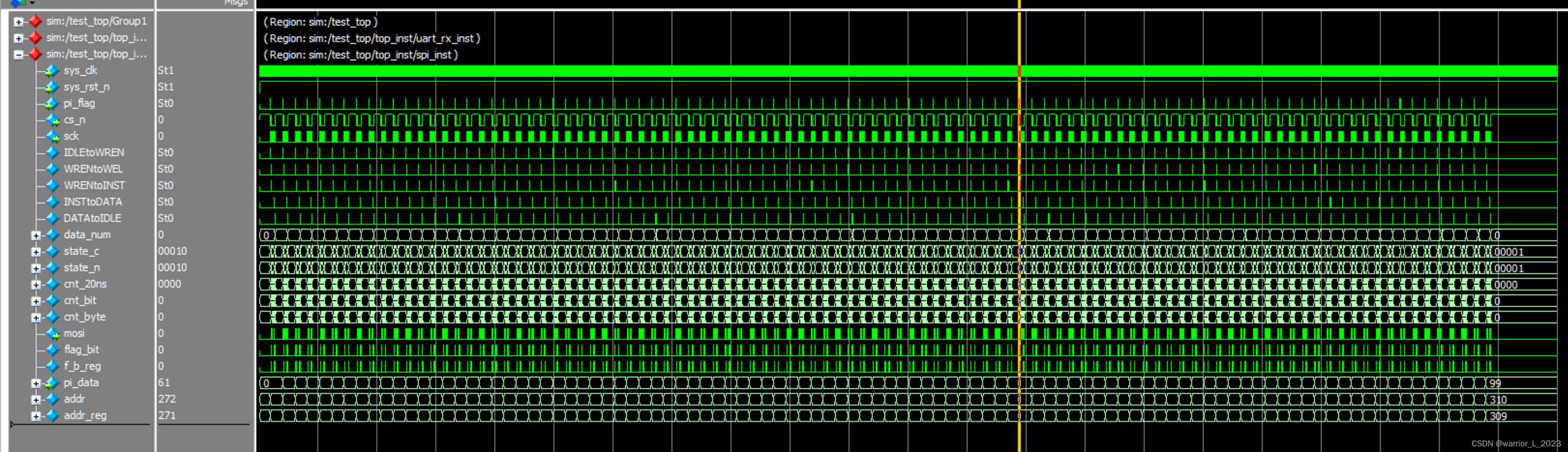
上版验证成功。
相关文章:
FPGA project : flash_continue_write
本实验学习了通过spi通信协议,驱动flash;完成连续写操作。 连续写: 本质上还是页编程指令,两种连续写的方式: 1,每次只写1byte的数据。 2,每次写满1页数据,计算剩余数据够不够写…...
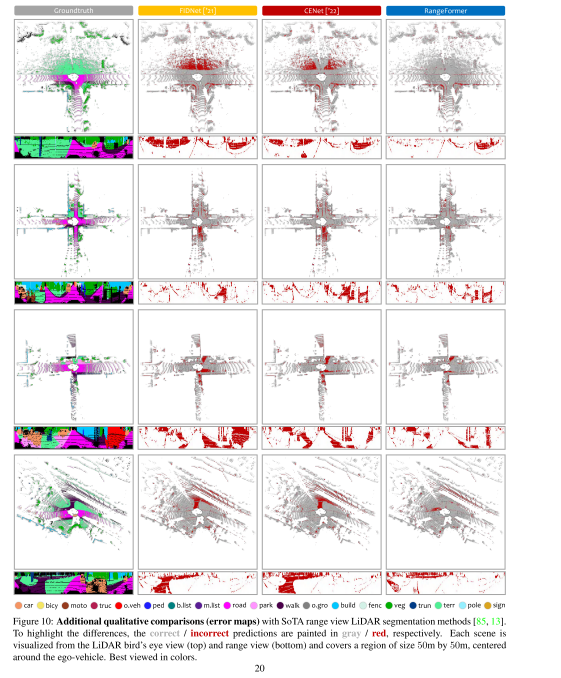
论文阅读:Rethinking Range View Representation for LiDAR Segmentation
来源ICCV2023 0、摘要 LiDAR分割对于自动驾驶感知至关重要。最近的趋势有利于基于点或体素的方法,因为它们通常产生比传统的距离视图表示更好的性能。在这项工作中,我们揭示了建立强大的距离视图模型的几个关键因素。我们观察到,“多对一”…...

本地配置免费的https咋做?
大家好这里是tony4geek。 今天和公司的小伙伴对接项目,因为涉及到https的权限调用。所以在服务器本地localhost 要配置https用来测试 。现在把过程中遇到的问题记录下来。 • 因为是测试用所以生成https的证书用免费的就可以了。 openssl req -x509 -nodes -days …...
微信小程序框架---详细教程
🎬 艳艳耶✌️:个人主页 🔥 个人专栏 :《Spring与Mybatis集成整合》《Vue.js使用》 ⛺️ 越努力 ,越幸运。 目录 1.框架 1.1响应的数据绑定 1.2.页面管理 1.3.基础组件 1.4.丰富的 API 2.视图层 View 2.1.介绍 …...

【LeetCode刷题(数组and排序)】:存在重复元素
给你一个整数数组 nums 。如果任一值在数组中出现 至少两次 ,返回 true ;如果数组中每个元素互不相同,返回 false 示例 1: 输入:nums [1,2,3,1] 输出:true 示例 2: 输入:nums [1,2…...
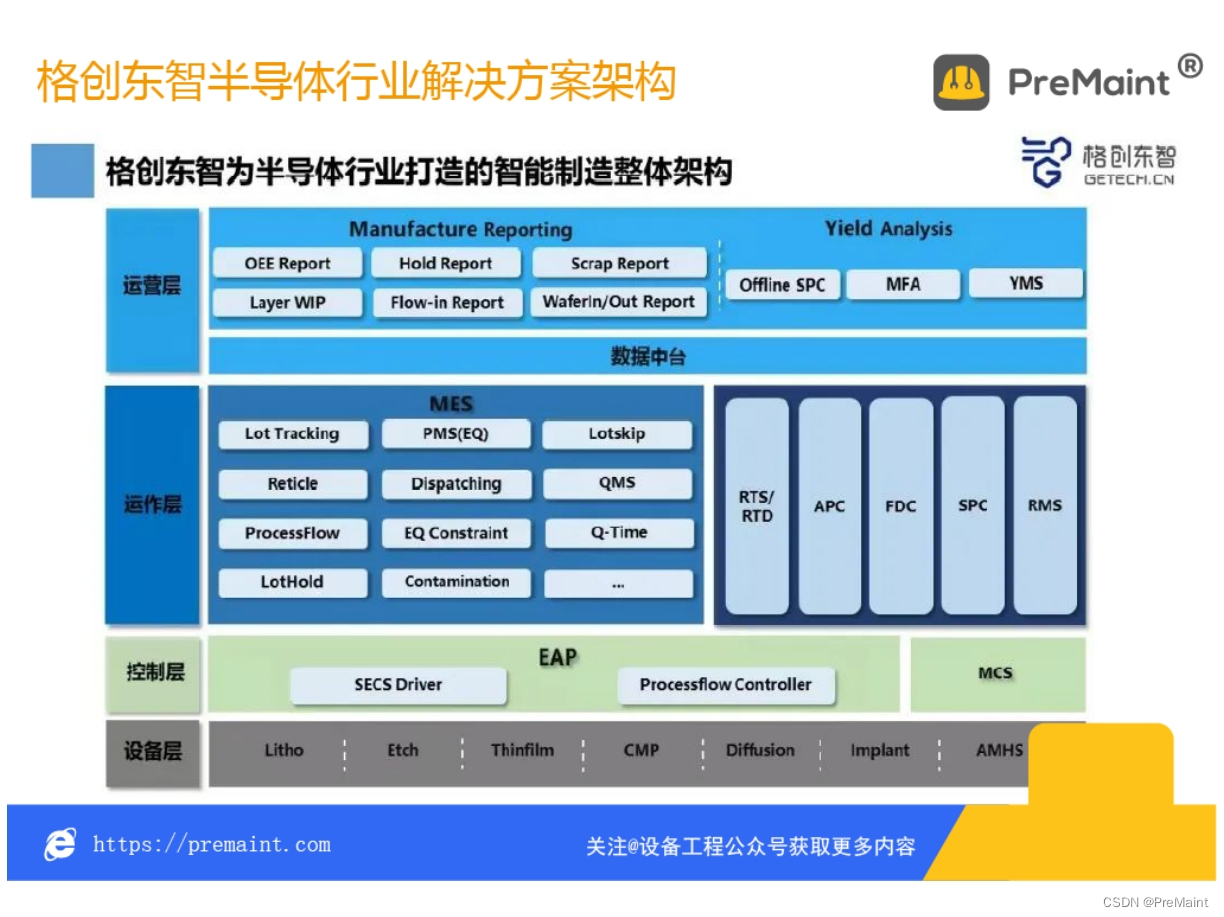
半导体产业链解析:晶圆厂、无晶圆厂与代工厂的比较与作用
半导体产业一直是全球科技发展的关键驱动力,在半导体产业中,晶圆厂、无晶圆厂公司和代工厂是三个重要的参与者。它们在产业环节、生产方式、经营模式和市场竞争等方面存在一些显著差异。本文将探讨半导体晶圆厂、无晶圆厂公司和代工厂之间的区别…...
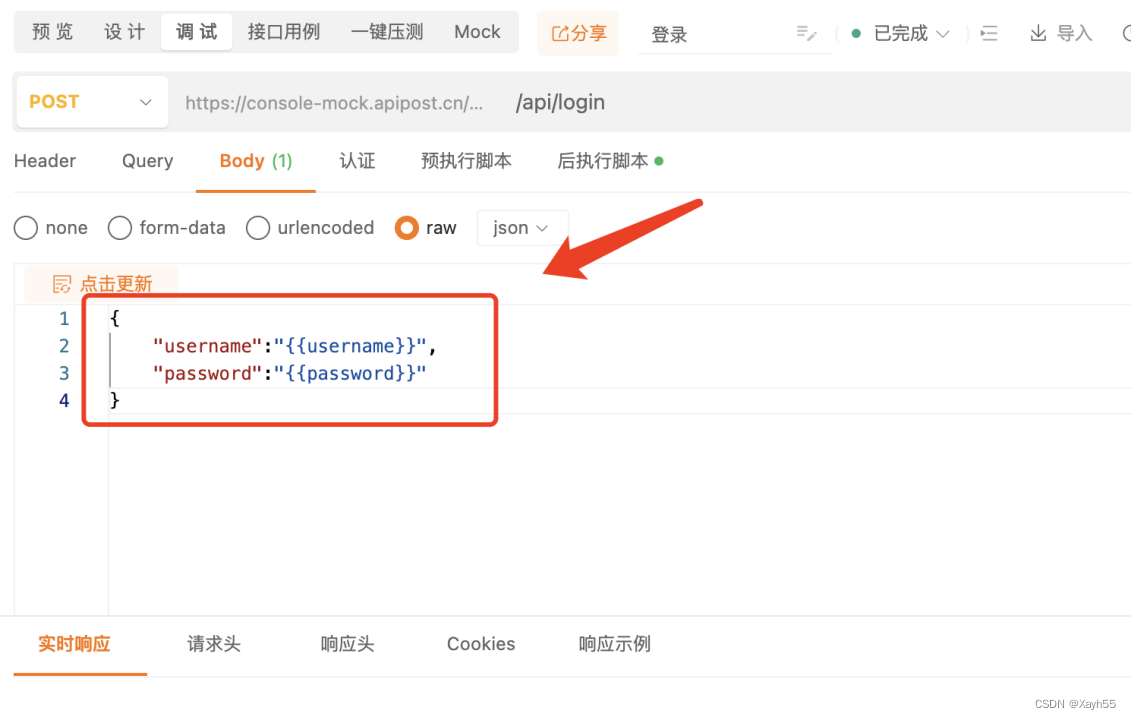
Apipost一键压测已支持导入CSV文件
最近更新中Apipost对UI页面进行了一些调整,另外一键压测功能支持参数化!本篇文章将详细介绍这些改动! API调试页面的细节改动 在请求区填入请求参数或脚本时会有相应的标识 如在Query中填入多个参数时上方会展示数量 在预、后执行脚本中写…...

RabbitMQ的5种模式——再探RabbitMQ的模式,简单、工作,发布订阅(广播),路由、主题 页面分析
前言 RabbitMQ作为一款常用的消息中间件,在微服务项目中得到大量应用,其本身是微服务中的重点和难点,有不少概念我自己的也是一知半解,本系列博客尝试结合实际应用场景阐述RabbitMQ的应用,分析其为什么使用࿰…...
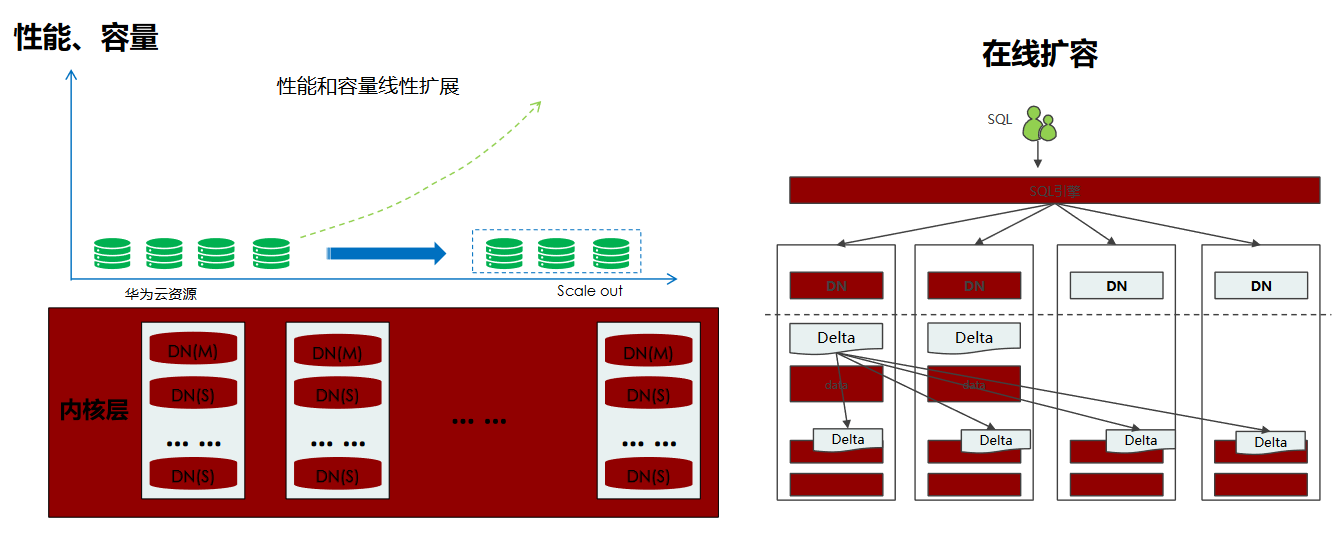
初识华为云数据库GaussDB for openGauss
01 前言 GaussDB是华为自主创新研发的分布式关系型数据库。该产品具备企业级复杂事务混合负载能力,同时支持分布式事务,同城跨AZ部署,数据0丢失,支持1000的扩展能力,PB级海量存储。同时拥有云上高可用,高可…...

深圳寄包裹到德国
深圳,作为全球最发达的城市之一,以其高效的物流服务在全球范围内享有盛名。如果你正在寻找一种方式将包裹从深圳寄送到德国,那么本文将为你提供详细的步骤和建议。 第一步:了解国际邮寄的基本信息 首先,你需要了解包裹…...
Redis篇)
系统架构师备考倒计时22天(每日知识点)Redis篇
Redis篇 1.Redis与Memcache能力对比 工作MemCacheRedis数据类型简单 key/value 结构丰富的数据结构持久性不支持支持分布式存储客户端哈希分片/一致性哈希多种方式,主从、Sentinel、Cluster 等多线程支持支持支持(Redis5.0及以前版本不支持)内存管理私有内存池/内…...
,库存水平(inventory level),库存位置(inventory position))
现有库存(on-hand inventory),库存水平(inventory level),库存位置(inventory position)
库存管理中,这几个名词特别容易混,干脆写一篇博客总结下。 现有库存(on-hand inventory),是指持有的真实库存量 库存水平(inventory level),现有库存减去延迟交付的订单 inventory level on-hand inventory − backorder quant…...
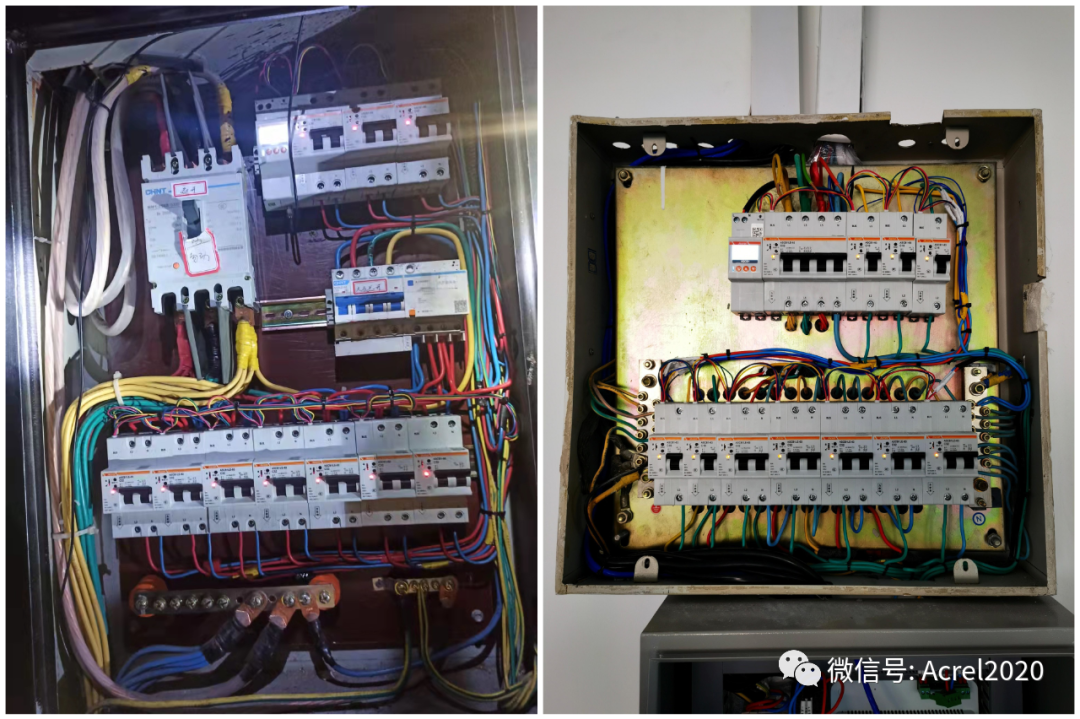
智慧空开让用电更安全、管理更智能——电脑APP远程控制开合闸
安科瑞 崔丽洁 01 什么是低压断路器?低压断路器的定义是:能够接通、承载及分断正常电路条件下的电流,也能在规定的非正常电路条件(过载、短路、特别是短路)下接通、承载一定时间和分断电流的开关电器。 断路器的分类&…...

PyTorch 中张量运算广播
TLDR 右对齐,空补一,从左往右依维运算 [m] [x, y] [m x, m y] 正文 以如下 a b 两个 tensor 计算为例 a torch.tensor([[1],[2],[3], ]) b torch.tensor([[[1, 2, 3],],[[4, 5, 6],],[[7, 8, 9],], ]) # a.shape (3, 1) # b.shape (3, 1, 3)首先…...
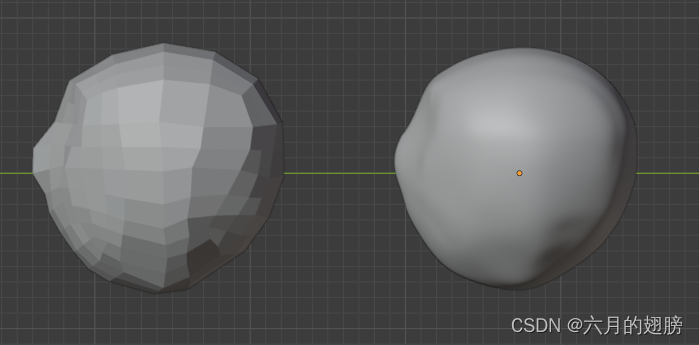
Blender:使用立方体制作动漫头像
好久没水文章 排名都掉到1w外了 ~_~ 学习一下blender,看能不能学习一点曲面变形的思路 一些快捷键 ctrl 空格:区域最大化,就是全屏 ctrl alt 空格:也是区域最大化 shift b:框选区域然后最大化显示该范围 shift 空…...
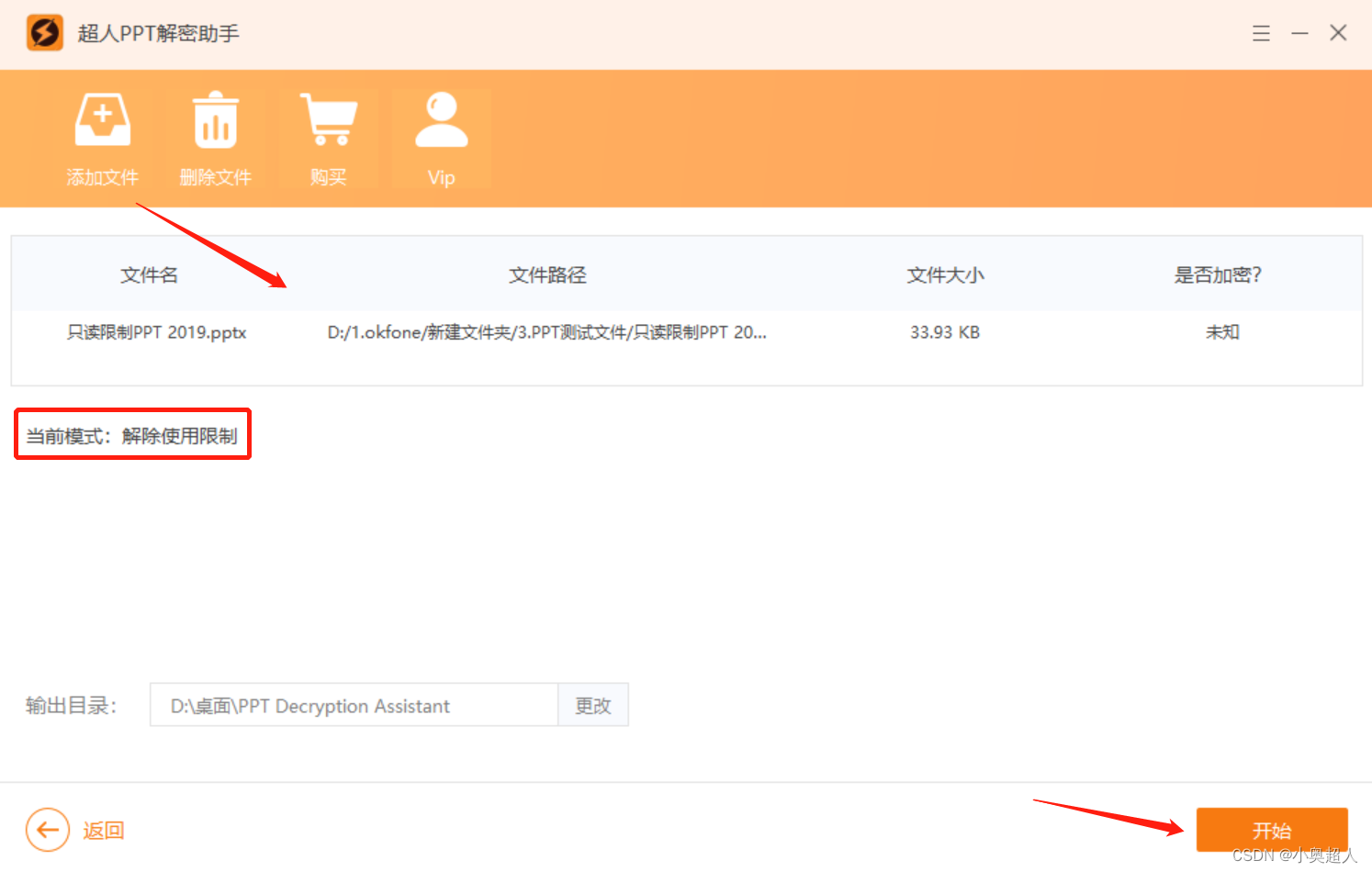
【ppt技巧】ppt里的图片如何提取出来?
之前分享过如何将PPT文件导出成图片,今天继续分享PPT技巧,如何提取出PPT文件里面的图片。 首先,我们将PPT文件的后缀名,修改为rar,将文件改为压缩包文件 然后我们将压缩包文件进行解压 最好是以文件夹的形式解压出来…...

Python学习基础笔记七十三——调试程序
为什么要调试? 我们发现程序运行的结果和我们预期的不符。 程序运行的错误,我们通常叫做bug。 有两种类型的bug:语句错误和逻辑错误。 所谓语句错误,就是执行代码的时候,解释器就可以直接发现的代码错误,…...
BOSHIDA DC电源模块关于电容器的电解液位置
BOSHIDA DC电源模块关于电容器的电解液位置 DC电源模块中的电容器扮演着一个非常重要的角色,它们能够对电路提供稳定的电源电压,同时也可以作为电路中的滤波器,去除电路中的噪声和纹波。在DC电源模块中使用的电容器通常是电解型电容器&#…...

如何实现 Es 全文检索、高亮文本略缩处理(封装工具接口极致解耦)
如何实现 Es 全文检索、高亮文本略缩处理 前言技术选型JAVA 常用语法说明全文检索开发高亮开发Es Map 转对象使用核心代码 Trans 接口(支持父类属性的复杂映射)Trans 接口可优化的点高亮全局配置类如下真实项目落地效果为什么不用 numOfFragments、fragm…...
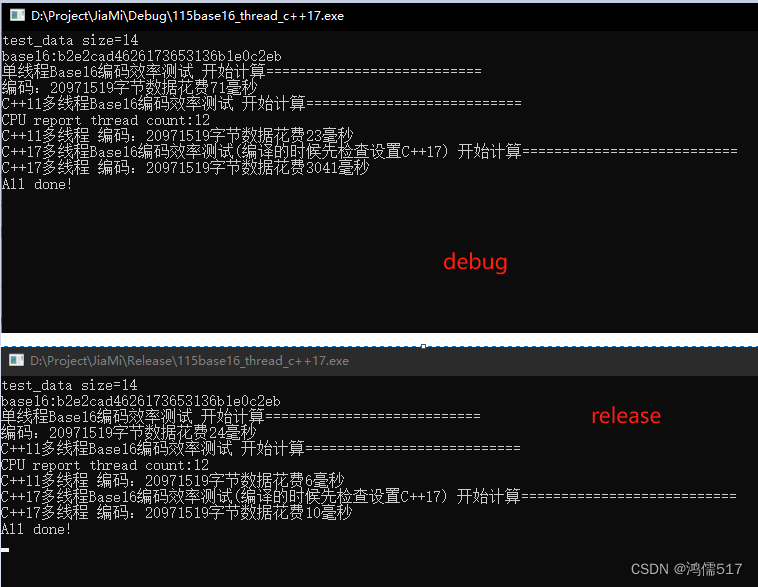
C++多线程编程(第四章 案例1,C++11和C++17 多核并行计算样例)
目录 4.1手动实现多核base16编码4.1.1 实现base16编码4.1.2无多线程代码4.1.3 C 11多线程代码4.1.4 C 17多线程并发4.1.5 所有测试代码汇总 4.1手动实现多核base16编码 4.1.1 实现base16编码 二进制转换为字符串 一个字节8位,拆分为两个4位字节(最大值…...
之外,还有哪些玩家值得关注)
别再只盯着AWS了!聊聊Hyperscaler三巨头(AWS/Azure/GCP)之外,还有哪些玩家值得关注
超越三巨头:全球云计算市场中的隐藏冠军与战略选择 当企业开始规划云战略时,AWS、Azure和GCP这三家"超大规模云服务商"(hyperscaler)往往成为默认选项。但全球云市场远比这复杂——根据Gartner最新数据,202…...

DeepSeek-V4本地部署全指南:vLLM分布式推理+量化配置
⚙️ 工程深度:L4 生产级 | 📖 预计阅读:30 分钟 为什么写这篇 很多工程师面对 DeepSeek-V4 的部署决策时,第一反应是"自建肯定比 API 贵"。这个直觉并不总是错的,但它忽略了一个基本事实:API 的成本随调用量线性增长,自建的成本是固定的。两条成本曲线必…...
来爬取用户作品的)
从抓包到自动化:我是如何破解快手APP的token签名(__NStokensig)来爬取用户作品的
逆向工程实战:解析短视频平台API签名机制的技术探索 当我们需要从主流短视频平台获取公开数据时,往往会遇到各种API签名验证的阻碍。这些签名机制设计精巧,既保护了平台数据安全,也为技术爱好者提供了逆向研究的绝佳案例。本文将…...

ARM LPDDR2 DMC-342内存控制器错误分类与工程实践
1. ARM LPDDR2 DMC-342内存控制器错误分类解析在移动设备和嵌入式系统开发中,内存控制器的稳定性直接关系到整个系统的可靠性。作为ARM架构中负责LPDDR2内存管理的核心组件,DMC-342控制器通过AXI接口与处理器交互,其行为规范对系统设计至关重…...

基于Azure Cosmos DB与OpenAI构建企业级RAG智能问答应用实战
1. 项目概述:构建一个基于向量数据库的智能对话应用最近在折腾一个挺有意思的项目,想和大家分享一下如何用 Azure Cosmos DB 和 Azure OpenAI Service 来搭建一个真正能用的“副驾驶”应用。这个项目的核心思路,就是把你的数据变成 AI 能理解…...

3分钟搞定QQ音乐加密文件:qmcdump终极解码指南
3分钟搞定QQ音乐加密文件:qmcdump终极解码指南 【免费下载链接】qmcdump 一个简单的QQ音乐解码(qmcflac/qmc0/qmc3 转 flac/mp3),仅为个人学习参考用。 项目地址: https://gitcode.com/gh_mirrors/qm/qmcdump 你是否曾经在…...

Gemini3.1Pro行业定制:高效搭建垂直提示词体系
很多人用 Gemini 3.1 Pro 的方式比较“通用”:问一句、要一段内容、再看结果是否顺眼。但真正落地到行业场景时,你会发现通用问法经常带来两个问题:一是输出风格不稳定,二是关键字段缺失(例如结构、口径、约束条件&…...

OmenSuperHub:惠普OMEN游戏本性能解锁终极指南,一键释放隐藏性能
OmenSuperHub:惠普OMEN游戏本性能解锁终极指南,一键释放隐藏性能 【免费下载链接】OmenSuperHub 使用 WMI BIOS控制性能和风扇速度,自动解除DB功耗限制。 项目地址: https://gitcode.com/gh_mirrors/om/OmenSuperHub 还在为你的惠普OM…...

AI对话系统会话连贯性解决方案:session-coherence库实战指南
1. 项目概述与核心价值最近在折腾AI应用开发,特别是涉及到多轮对话和复杂会话管理的场景时,发现一个挺头疼的问题:如何让AI记住上下文,并且在长时间、多主题的交流中保持逻辑连贯?这不仅仅是简单的“记住上一条消息”&…...

如何突破百度网盘限速?终极直链解析工具让你的下载速度飙升10倍!
如何突破百度网盘限速?终极直链解析工具让你的下载速度飙升10倍! 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 你是否经常遇到这样的困扰:…...