Tesla Autopilot,处理器和硬件
作者 | 初光
出品 | 车端
备注 | 转载请阅读文中版权声明
知圈 | 进“汽车电子与AutoSAR开发”群,请加微“cloud2sunshine”
总目录链接==>> AutoSAR入门和实战系列总目录
Tesla MOdelS/X 中有 60 多个处理器。其他型号的处理器较少,但数量仍然不少。
在这里,我们将重点关注两个处理器模块:媒体控制单元 (MCU)和自动驾驶ECU处理器,这两个模块经常混淆它们的功能。
01 媒体控制单元 (MCU:Media Control Unit)
媒体控制单元MCU是指2021年1月前Tesla MOdelS/Tesla MOdelX仪表盘中央带触控显示屏的电脑模块,或2021年1月后Tesla MOdel3/Y和Tesla MOdelS/X的主电脑模块。
该模块包括处理器、RAM、非易失性存储器、音频子系统、音频放大器、WiFi、蜂窝、蓝牙、GPS、以太网桥、多个 CAN 总线通信、LIN 总线、USB 端口等。
MCU负责可视化、所有外部通信、音频、蜂窝、导航和设置。除了设置之外,它与Autopilot的驾驶能力关系不大。
Tesla MOdelS/X中的MCU有3个版本:
MCU1
MCU1——从开始生产到 2018 年 2 月生产的所有 S/X 汽车都使用 Nvidia 四核处理器。特斯拉现在提供从 MCU1 切换到 MCU2 的改装选项。
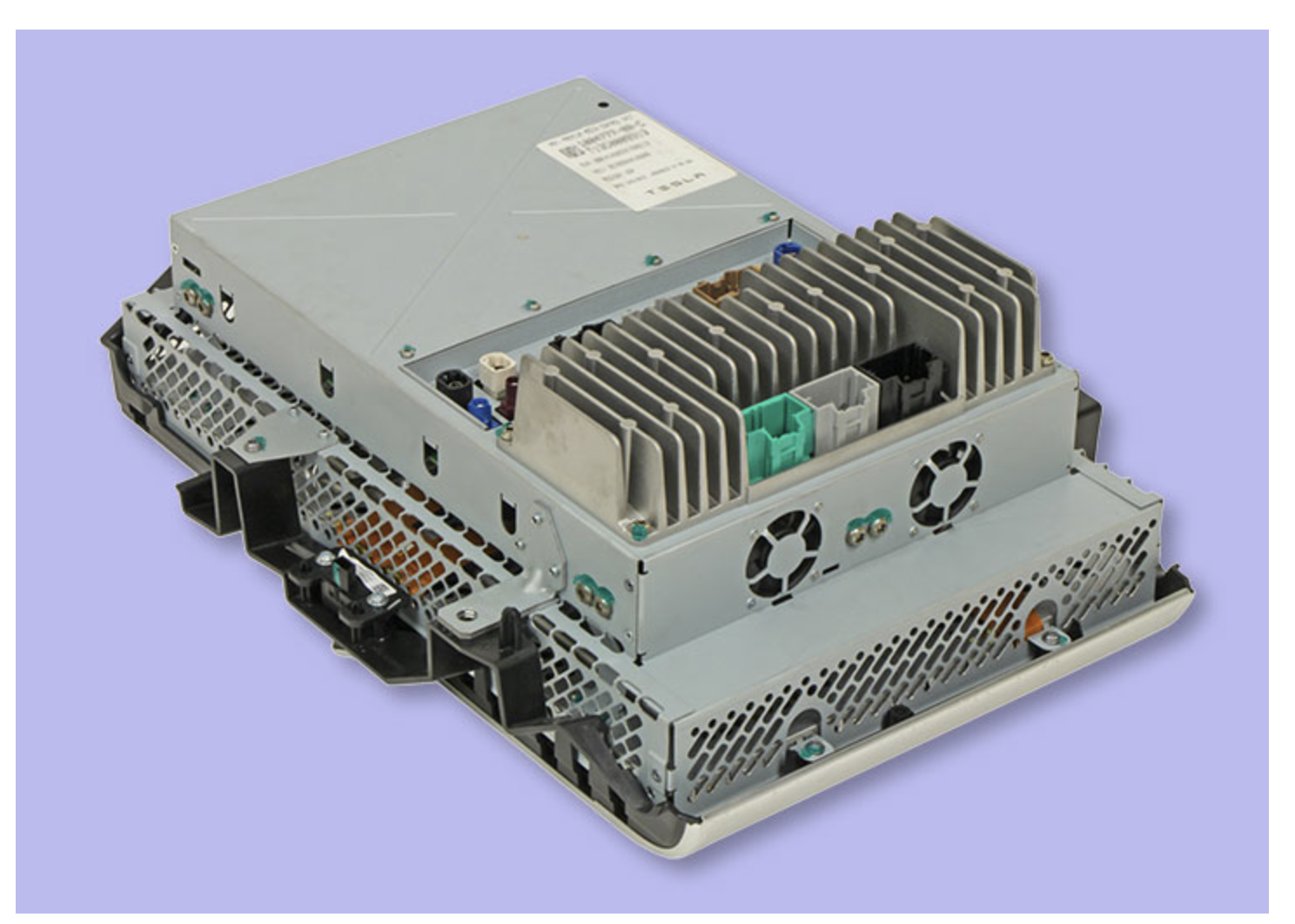
实际上有两个 MCU1 变体,具有不同的连接器。两种变体的内部构造基本相同。红色箭头表示连接器的变化。不再制造旧的1004777。对于旧车,较新的 1045006 零件可与适配器一起使用。一些最早的1004777 MCU只有3G,没有LTE。特斯拉为那些需要 LTE 的用户提供付费升级,这会改变 MCU1 中的一个模块。所有 1045006 变体都包括 LTE。

MCU2
MCU2——使用英特尔多核 Atom 处理器,该 MCU 于 2018 年 3 月开始在 S/X 中发货。MCU2 提供 snapper 操作、5 GHz WiFi、更新的蓝牙版本和附加天线(MCU2 外部),以及其他小的变化。
如果您想确认您的 S/X 有哪个 MCU,我们创建了一个 MCU 测试仪。在车上浏览器输入:TeslaTap.com/mcu
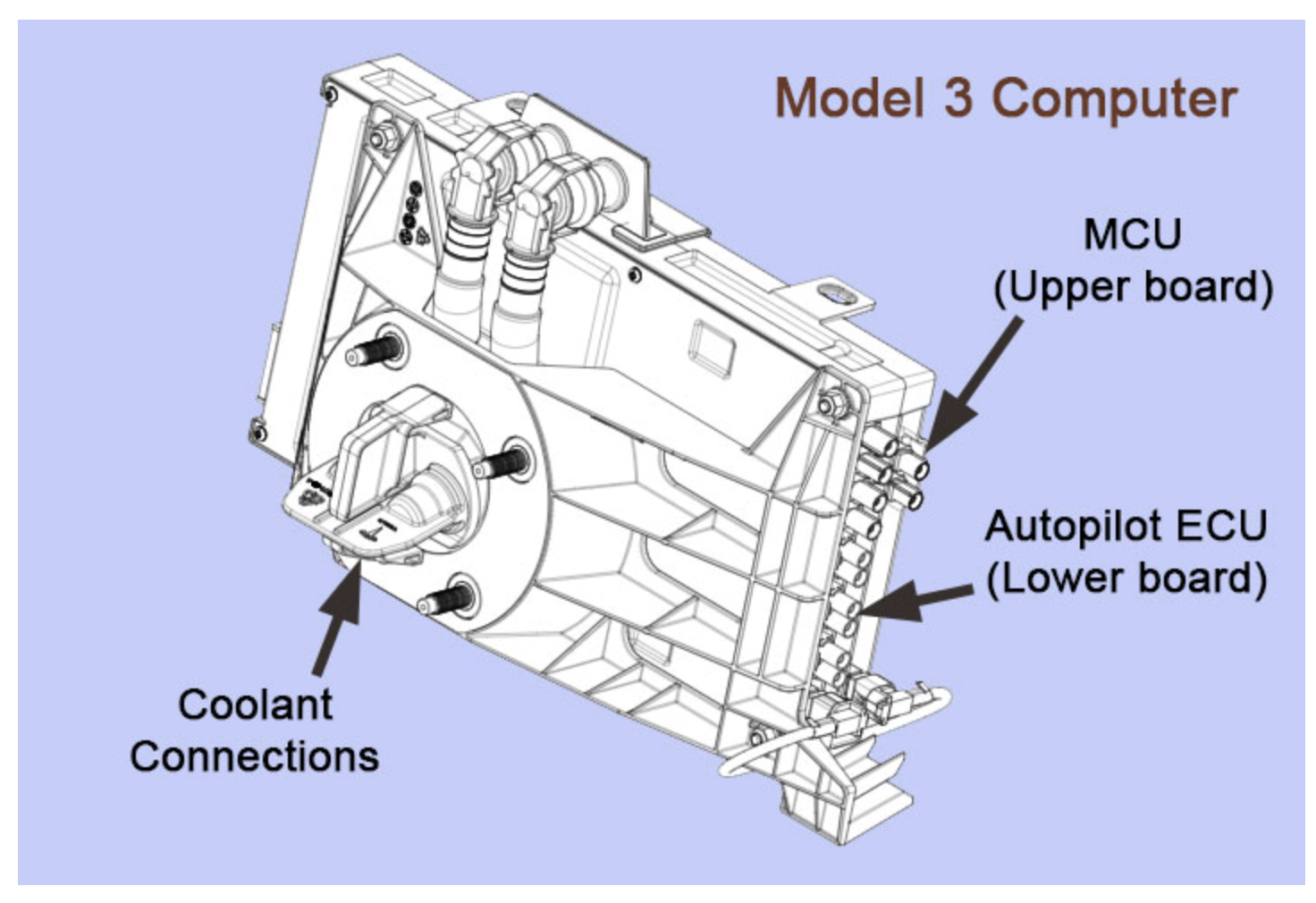
Model 3/Y 架构不同,显示器和 MCU 在不同的模块中。该 MCU 还使用与 2021 年 6 月之前的 S/X MCU2 相同的英特尔凌动处理器和其他组件。
MCU-Z
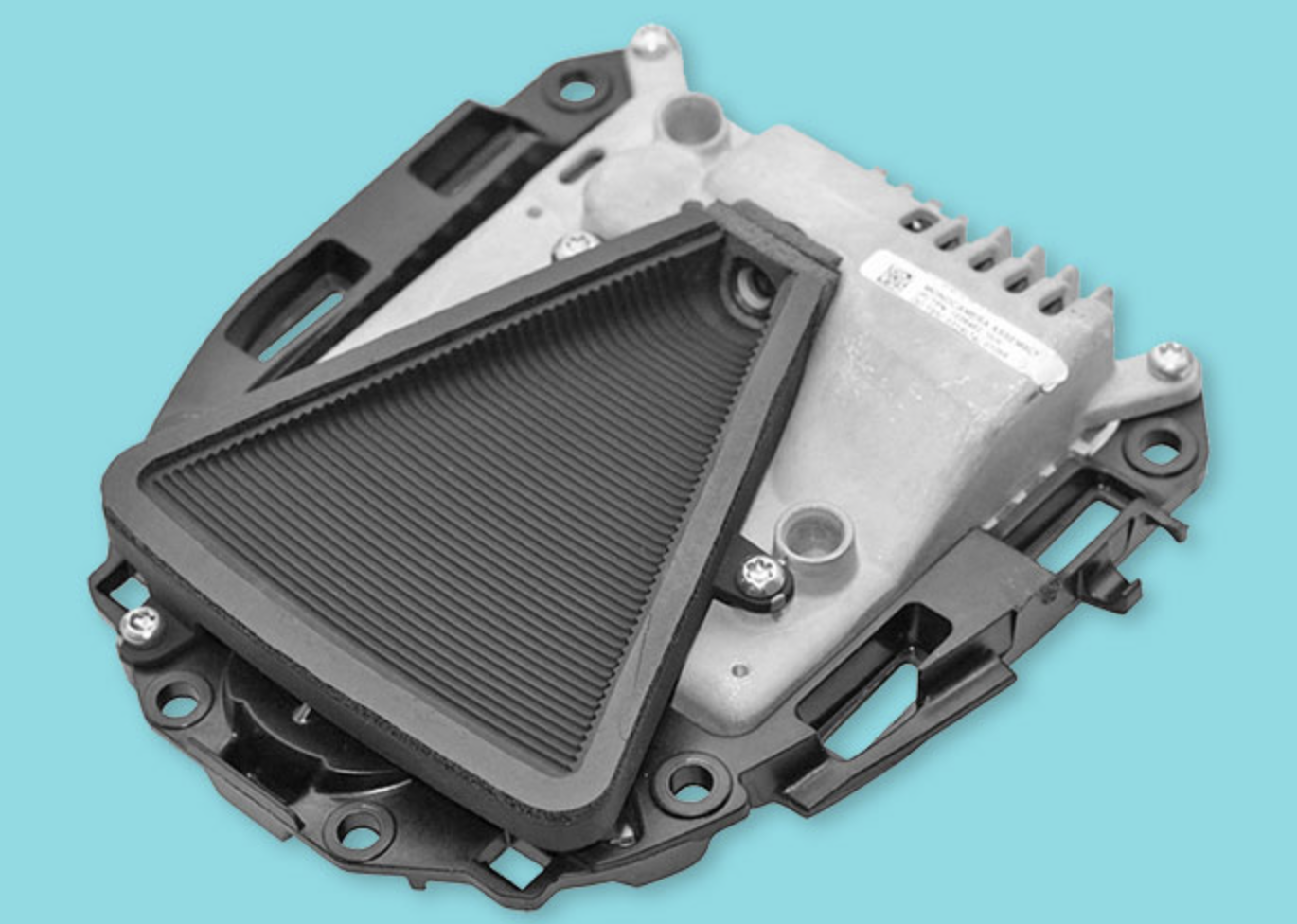
MCU-Z——这是 2021 年年中制造的 S/X 车辆中使用的最新模块。它是一个类似于 3/Y 的液冷模块,但配备了新的处理器。2021 年第四季度的中国 Model Y 似乎已改用 MCU-Z 的变体,预计所有汽车都可能在 2022 年的某个时候改用 MCU-Z 的变体。
它似乎使用了 AMD Navi 23 GPU,这是对之前 GPU 的重大升级。它处理 S/X 中的所有三台显示器,一台使用 HDMI,另外两台使用 DisplayPort。图形处理能力被认为接近同样使用 AMD GPU 的索尼 PS5。
该 CPU 是 AMD Ryzen 处理器, 比 MCU2 中的 Intel Atom 处理器有了显着的性能升级。
02 自动驾驶ECU处理器(AEP:Autopilot ECU Processor)
目前有四种与 Autopilot 相关的车辆硬件变体。
HW0
HW0 – 没有自动驾驶功能的早期 Model S。
HW1
HW1 – 第一个Autopilot,基于 Mobileye 芯片。它使用一个摄像头、雷达和 12 个中程超声波传感器。电子设备与摄像头位于同一位置,位于后视镜后面。
HW2.0
HW2.0—— 特斯拉第二代设计,采用8个摄像头、12个远程超声波传感器、1个前置雷达。特斯拉基于 Nvidia 的 Drive PX2 系统创建了一个全新的 ECU 处理器模块。该 ECU 位于手套箱下方。
HW2.5
HW2.5 – 这提供了对 HW2.0 的小更新,主要是为了冗余和略微提高的可靠性。该版本还使两个非自动驾驶功能成为可能——行车记录仪和带有本地保存视频的哨兵模式。

早期的 Model 3/Y Autopilot ECU 硬件类似于 HW2.5,但使用来自汽车冷却剂回路的液体冷却而不是风扇。
HW3
HW3 – 使用特斯拉自己的芯片设计对自动驾驶 ECU 进行重大更新。
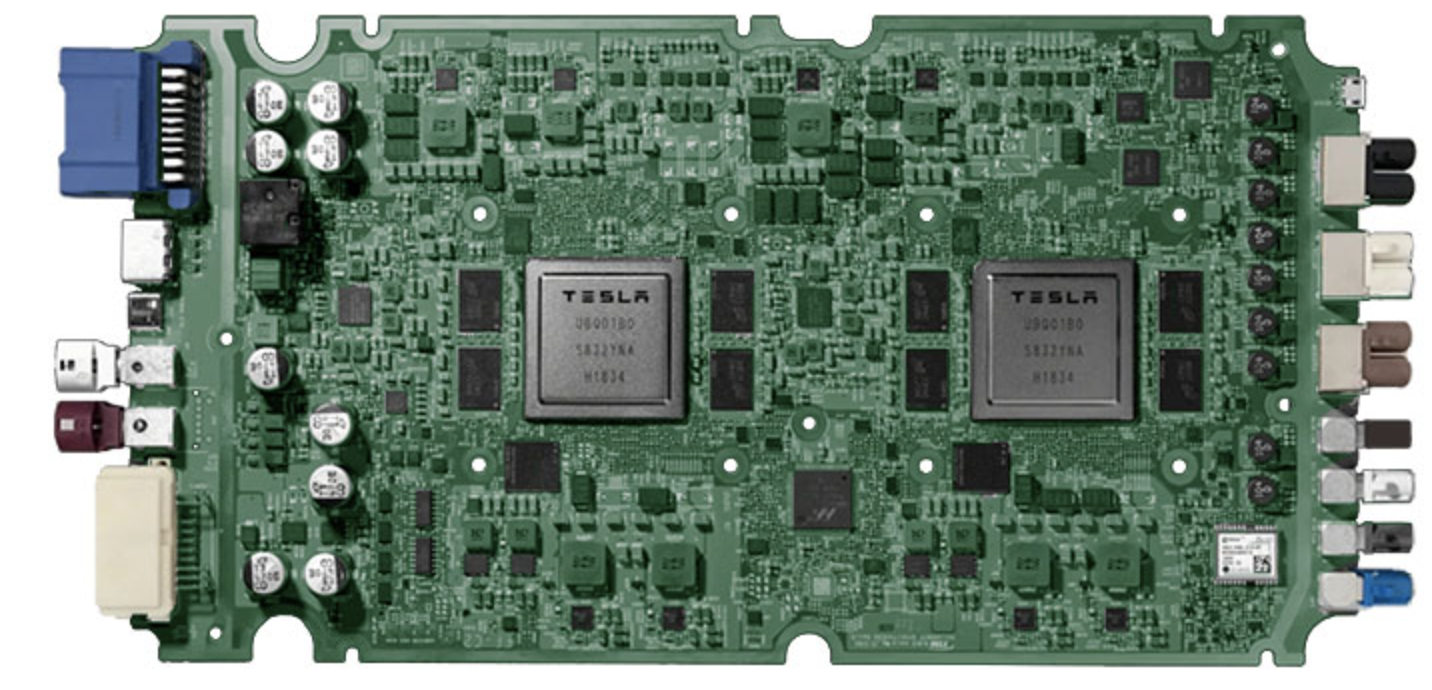
HW4
HW4 – 使用特斯拉第二代芯片设计的自动驾驶 ECU 的未来更新正在开发中。预计其性能是 HW3 的 3 倍。特斯拉近期将发布HW4
03 硬件发布顺序和时间表
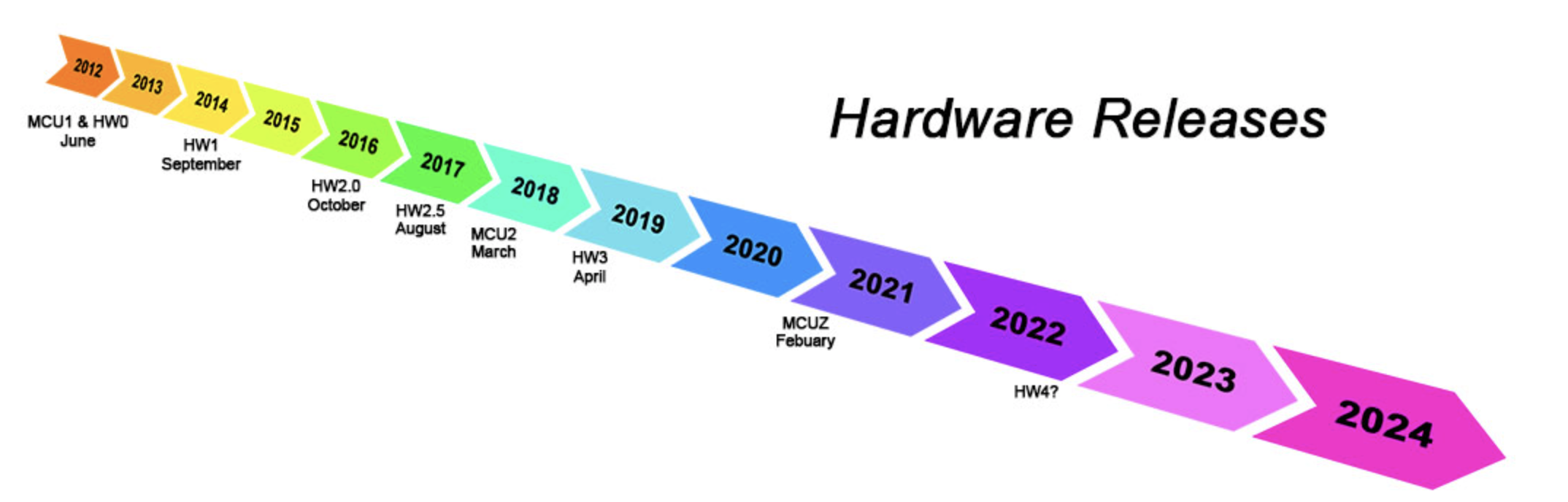
| Hardware Level | Release Date Model S/X | Release Date Model 3/Y |
|---|---|---|
| MCU1 & HW0 | 22-Jun-2012 | n/a |
| HW1 | 17-Sep-2014 | n/a |
| HW2.0 | 1-Oct-2016 | n/a |
| MCU2 | 1-March-2018 | 28-Jul-2017* |
| HW2.5 | 1-Aug-2017 | 28-Jul-2017* |
| HW3 | 22-Mar-2019 | 12-Apr-2019** |
| MCUZ | 1-Feb-2021 | 1-Apr-2022 (estimate) |
| HW4 | Q4-2022 (Estimate) | Q4-2022 (Estimate) |
*-开始生产 Model 3,但硬件与 S/X 不同,CPU 与 S/X 相同。
** -2019 年夏季有少量汽车获得 HW2.5 AP 处理器而不是 HW3。
04 新车的硬件规格(无改装)
这涵盖了构成各种硬件版本的 Autopilot 系统的许多技术组件。
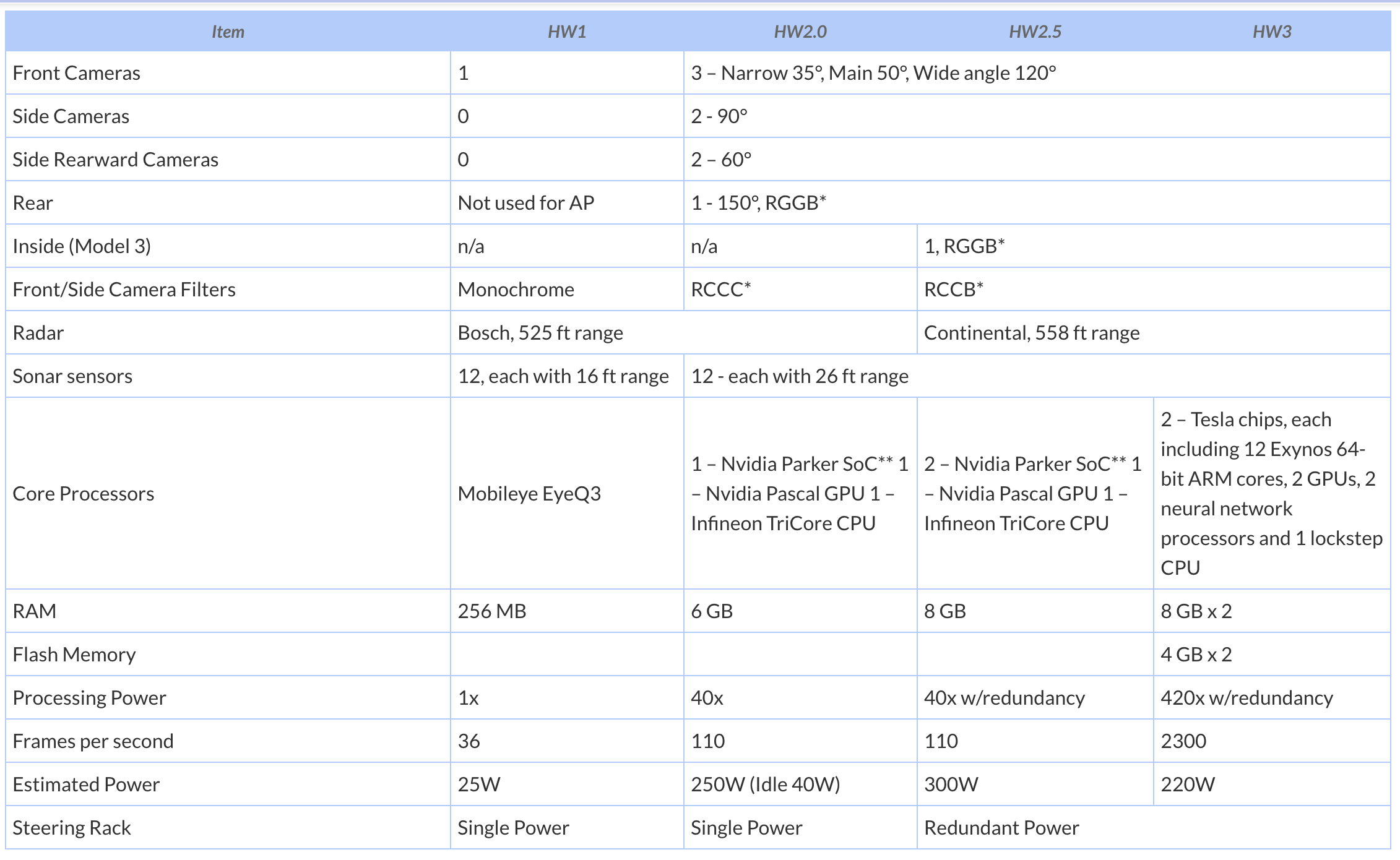
*-在相机中,每个像素由 4 个感光器表示,并带有滤镜组合:C=Clear、R=Red、G=Green、B=Blue。一个像素的多个相同过滤器增加了感光度。使用 RCCB,没有绿色过滤器来提高夜间光敏感度,可以计算绿色为行车记录仪制作彩色图像。
** -Pascal SoC 包括 2 个 Denver 和 4 个 ARM A57 CPU 内核以及一个 Pascal GPU
05 改装
对于具有 FSD 功能的旧车,那些购买了无限制全自动驾驶 (FSD) 的车主可以免费升级到 HW3 ECU 处理器。2019 年秋季开始对 HW2.5 车辆进行 HW3 升级,2020 年开始对 HW2.0 车辆进行 HW3 升级。
对于拥有 HW2.0 和 FSD 的车主,特斯拉在 2021 年底启动了一项免费改造计划,以更新 8 个摄像头中的 7 个。该程序由 VIN 和零件可用性控制。
包月的FSD也要求车上有HW3 ECU处理器。如果汽车没有 HW3 ECU 并且能够进行改装,则需要 1000 美元的费用才能获得 HW3 ECU。
对于HW2.0车主来说,HW3 ECU的加入,提供了FSD必备的硬件。它还启用了行车记录仪和哨兵模式功能,尽管 MCU1 的质量不是很好。 业主还可以将 MCU1 升级为 MCU2。
06 自动驾驶和安全相关功能
多年来,特斯拉Autopilot的术语发生了变化。第一个使用一个摄像头的自动驾驶系统现在被非正式地称为 AP1。从新硬件 HW2.0 开始,Tesla 将功能名称更改为增强型自动驾驶仪 (EAP),并具有多项额外功能。2019 年 3 月,特斯拉放弃了 EAP,并创建了一种成本更低、功能更少的自动驾驶仪,简称为 AP。4 月,这成为所有从网上订购的新车的标准配置(这不是特别订购的 Model 3 SR 的标准配置)。这个新的 AP 是 EAP 功能的一个子集,其他 EAP 功能被移动到 FSD(全自动驾驶)功能集中。
那些购买了 EAP 的所有者将继续获得所有 EAP 功能并在未来获得升级。例如智能召唤是一个 FSD 功能,但 EAP 所有者也有此功能。
FSD 功能是可选的,可以随新车一起购买,也可以稍后购买和激活。除了购买 FSD,特斯拉还计划提供按月订阅选项。订阅服务的详细信息和价格尚未确定。
以下特征图表仅适用于 2014 年 8 月 17 日及之后生产的车辆。早期的汽车没有任何这些功能。
| Feature | No AP | AP1 | AP* | EAP* | FSD* |
|---|---|---|---|---|---|
| Front Collision Avoidance | Yes | Yes | Yes | Yes | Yes |
| Lane Departure Warning | Yes | Yes | Yes | Yes | Yes |
| Lane Departure Avoidance | Yes* | No | Yes | Yes | Yes |
| Emergency Lane Departure Avoidance | Yes* | No | Yes | Yes | Yes |
| Side Collision Avoidance | Yes* | No*** | Yes | Yes | Yes |
| TACC | No | Yes | Yes | Yes | Yes |
| Autosteer, accelerate and brake | No | Yes | Yes | Yes | Yes |
| Autopark | No | Yes | No | Yes | Yes |
| Auto Lane Change | No | Yes** | No | Yes | Yes |
| Read Speed Signs | No | Yes | Yes | Yes | Yes |
| Summon | No | Yes | No | Yes | Yes |
| Smart Summon | No | No | No | Yes | Yes |
| Navigate on Autopilot | No | No | No | Yes | Yes |
| Respond to Traffic lights and stop signs | No | No | No | No | Yes |
| Full Self Driving | No | No | No | No | FutureFeature |
*- 需要 HW2.0 或更高版本或所有 Model 3/Y 车辆
** - AP1 需要在交通安全时进行确认
*** - 在 v8.0 软件之前可用,但无效并已删除
06 自动驾驶
下图显示了美国汽车工程师协会 (SAE) 定义的自动驾驶级别。
| SAE Level | 描述 | 监控者 |
|---|---|---|
| 0 | 没有自动化 | 司机 |
| 1个 | 辅助驾驶,通常带有巡航控制 | 司机 |
| 2个 | 具有转向、制动和在特定环境中转向的高级辅助驾驶 | 司机 |
| 3个 | 有条件的自动驾驶,但可能会要求司机接管 | 系统 |
| 4个 | 高度自动化驾驶,司机无需接管 | 系统 |
| 5个 | 全自动驾驶可以处理人类可以处理的任何事情。 | 系统 |
目前,特斯拉提供 2 级自动驾驶选项。特斯拉的目标是过渡到 3 级,并最终过渡到 5 级,称为 FSD。特斯拉在 2020 年初宣布,根据法规,部分 FSD 应在 2020 年底前上市。完整的 FSD 将取决于每个司法管辖区的完整软件开发和监管批准。
请记住,在某些情况下 FSD 将无法工作,在某些情况下人类也不应驾驶,尽管有些人会愚蠢地尝试。其中一些条件包括:
- 浓雾
- 大雪
- 道路上的厚积雪
- 冰雹
- 洪水
- 季风
- 强风(飓风和龙卷风)
- 大火席卷道路
- 熔岩流
- 泥石流
对于 99.99% 的日常驾驶,FSD 应该可以正常工作——就像人类一样。我们怀疑 FSD 在某些时候甚至可能与天气网络相关联,以确定是否存在到达目的地的障碍并就此问题提出建议。
07 零件号
| Item | Model | Part Number |
|---|---|---|
| MCU1 with display, early cars, no longer available | S/X | 1004777-00-A |
| MCU1 with updated display and LTE, the latest version | S/X | 1045006-00-J |
| MCU1 Internal Tegra board with 64 GB eMMC | S/X | 2728212-S0-B |
| MCU2 with display | S/X | 1451809-S0-B |
| MCUZ and Autopilot ECU | S/X | 1637790-S0-F |
| Autopilot ECU 2.0 | S/X | 1078321-00-C (MS) 1078321-70-C 1078321-70-D 1078321-70-G |
| Autopilot ECU 2.5 | S/X | 1125800-70-C 1125800-70-G |
| Autopilot ECU 3.0 | S/X | 1655000-00-F* 1655000-70-F |
| MCU2 and Autopilot ECU ** | 3/Y | 1566786-S0-E |
| MCUZ and Autopilot ECU | 3/Y | 1681271-S0-D |
*- 00 变体有 HDMI 端口,可能用于开发
** - MCU 和自动驾驶仪 ECU 是同一模块中的两块板,在功能上类似于 S/X MCU2 的计算机和Autopilot ECU
相关文章:
Tesla Autopilot,处理器和硬件
作者 | 初光 出品 | 车端 备注 | 转载请阅读文中版权声明 知圈 | 进“汽车电子与AutoSAR开发”群,请加微“cloud2sunshine” 总目录链接>> AutoSAR入门和实战系列总目录 Tesla MOdelS/X 中有 60 多个处理器。其他型号的处理器较少,但数量仍然不少…...
jianzhiOffer第二版难重点记录
04. 二维数组中的查找https://leetcode.cn/problems/er-wei-shu-zu-zhong-de-cha-zhao-lcof/ 思路:可以每层用以恶搞二分查找,优化思路:从左下角出发直接用二分。 07. 重建二叉树https://leetcode.cn/problems/zhong-jian-er-cha…...

C语言 | 问题20230225
C语言 | 问题20230225 文章目录C语言 | 问题202302251.问题1无限循环2.问题2C 中的运算符优先级实例1:1.问题1 Which slice of the following code is NOT endless loop? 以下代码的哪一部分不是无限循环? A for (;(cgetchar())!\n; ) printf("*c&…...
【机器学习笔记】Python基础笔记
目录基础语法加载数据:pd.read_csv查看数据大小:shape浏览数据行字段:columns浏览少量数据:head()浏览数据概要:describe()基础功能语法缺省值去除缺失值:dropna按行删除:存在空值,即…...

js-DOM03-DOM对CSS的操作
DOM对CSS的操作 - 读取和修改内联样式 - 使用style属性来操作元素的内联样式 - 读取内联样式: 语法:元素.style.样式名 - 例子: 元素.style.width 元素.style.…...

tun驱动之tun_init
tun驱动的初始化方法是tun_init。 static int __init tun_init(void) {int ret 0;pr_info("%s, %s\n", DRV_DESCRIPTION, DRV_VERSION);ret rtnl_link_register(&tun_link_ops);if (ret) {pr_err("Cant register link_ops\n");goto err_linkops;}re…...

模拟退火算法优化bp
%% 基于模拟退火遗传算法优化BP神经网络的钢带厚度预测 clear clc close all format short %% 加载训练数据 Xtrxlsread(train_data.xlsx); DDsize(Xtr,2); input_trainXtr(:,1:DD-1);% output_trainXtr(:,DD);% %% 加载测试数据 Xtexlsread(test_data.xlsx); input_testXte(…...

【NFC音乐相册】简易制作
欢迎来到 Claffic 的博客 💞💞💞 前言: NFC音乐相册在前段时间火了一把,想必大家都听过了,最近我刷到了这个东西,闲来无事就弄了几个,这篇博客就记录下制作工序。 注:我所…...

每日一题——L1-085 试试手气(15)
L1-085 试试手气 我们知道一个骰子有 6 个面,分别刻了 1 到 6 个点。下面给你 6 个骰子的初始状态,即它们朝上一面的点数,让你一把抓起摇出另一套结果。假设你摇骰子的手段特别精妙,每次摇出的结果都满足以下两个条件:…...
FreeRTOS信号量
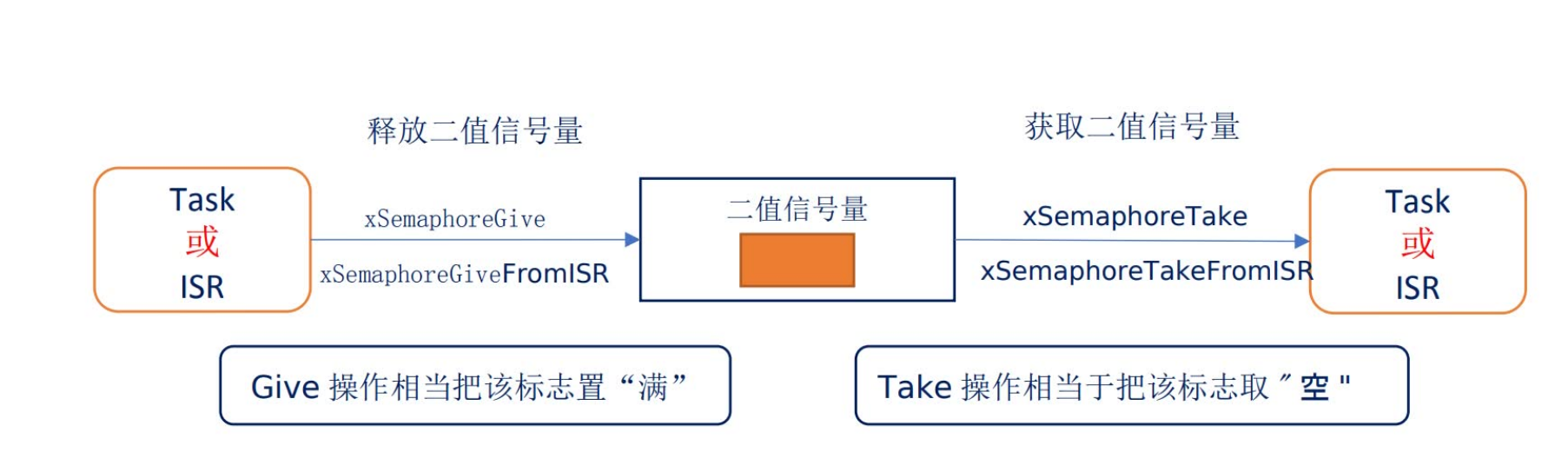
前面介绍过,队列(queue)可以用于传输数据:在任务之间,任务和中断之间。消息队列用于传输多个数据,但是有时候我们只需要传递一个状态,这个状态值需要用一个数值表示,比如:…...
Leetcode.2385 感染二叉树需要的总时间
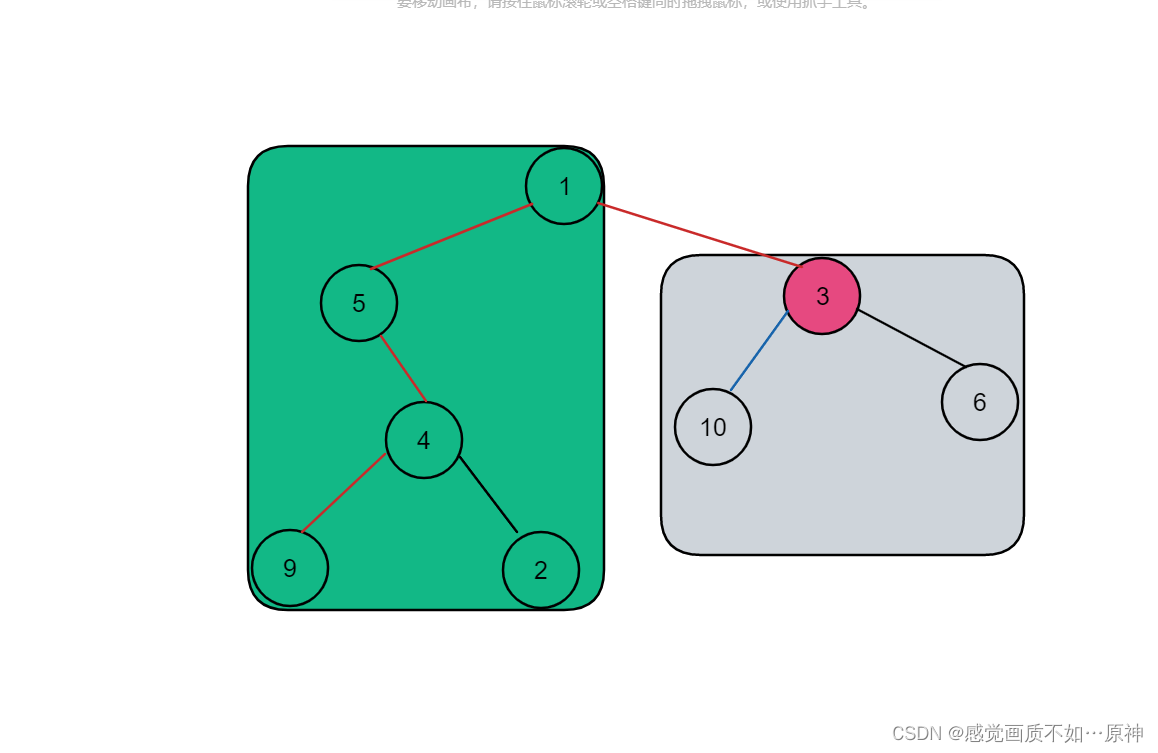
题目链接 Leetcode.2385 感染二叉树需要的总时间 Rating : 1711 题目描述 给你一棵二叉树的根节点 root,二叉树中节点的值 互不相同 。另给你一个整数 start。在第 0分钟,感染 将会从值为 start的节点开始爆发。 每分钟,如果节点…...

[蓝桥杯 2022 国 B] 卡牌(贪心/二分)
题目传送门 该题第一思路是想去模拟题目中所描述的过程 这里我选择从大到小遍历可能凑出的牌套数,计算凑出它需要补的牌数以及判断是否会超出能补的牌数 #include<iostream> #include<climits> #include<vector> #include<algorithm> #def…...

1301:大盗阿福
经典的dp打家劫舍问题状态设计dp[i][0]:在前i个店铺中选,且不选第i家的最大和dp[i][1]:在前i个店铺中选,且选第i家的最大和状态转移dp[i][0] max(dp[i-1][1], dp[i-1][0];第i家店不选,那么我们可以选第i-1个店 也可以…...
Netty——序列化的作用及自定义协议
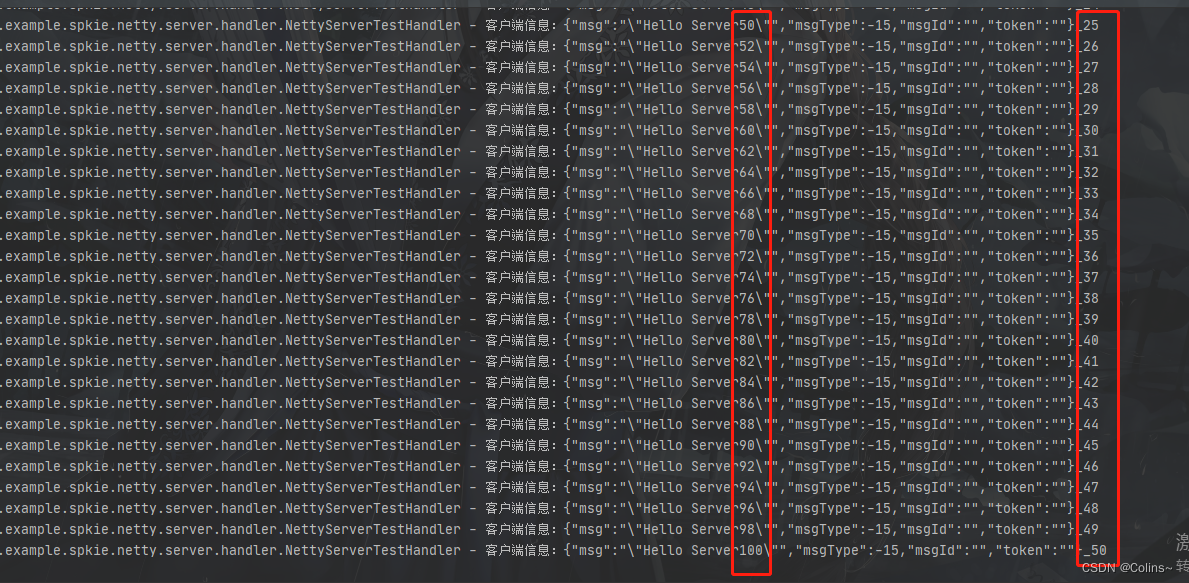
序列化的作用及自定义协议序列化的重要性大小对比效率对比自定义协议序列化数据结构自定义编码器自定义解码器安全性验证NettyClientNettyServerNettyClientTestHandlerNettyServerTestHandler结果上一章已经说了怎么解决沾包和拆包的问题,但是这样离一个成熟的通信…...
)
一起Talk Android吧(第五百零五回:如何调整组件在约束布局中的大小)
文章目录 背景介绍调整方法各位看官们大家好,上一回中咱们说的例子是"如何调整组件在约束布局中的位置",这一回中咱们说的例子是" 如何调整组件在约束布局中的大小"。闲话休提,言归正转, 让我们一起Talk Android吧! 背景介绍 在使用约束(constraintl…...

【数据库】数据库的完整性
第五章 数据库完整性 数据库完整性 数据库的完整性是指数据的正确性和相容性 数据的正确性是指数据是符合现实世界语义,反映当前实际状况的数据的相容性是指数据库的同一对象在不同的关系中的数据是符合逻辑的 关系模型中有三类完整性约束:实体完整性…...

基因净化车间装修设计方案SICOLAB
基因净化车间的设计方案应该根据实际需求进行定制,以下是一些规划建设要点和洁净设计要注意的事项:一、净化车间规划建设要点:(1)基因车间的面积应该根据实验项目的规模进行规划,包括充足的操作区域和足够的…...
java 内部类的四种“写法”
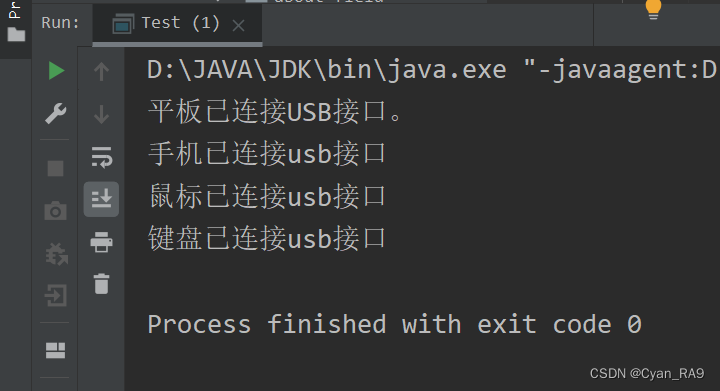
基本介绍语法格式分类成员内部类静态内部类局部内部类匿名内部类(🐂🖊)一、基本介绍 : 1.概述当一个类的内部又完整地嵌套了另一个类时,被嵌套于内部的“内核”我们称之为“内部类”(inner class);而包含该…...
【python】main方法教程
嗨害大家好鸭! 我是小熊猫~ 首先 if name "main": 可以看成是python程序的入口, 就像java中的main()方法, 但不完全正确。 事实上python程序是从上而下逐行运行的, 在.py文件中, 除…...

公司对不同职级能力抽象要求的具体化
要先把当前级别要求的能力提升到精通,然后尝试做下一级别的事情。 但可能不确定高一级的能力要求究竟怎样,不同Title,如“工程师”“高级工程师”和“资深工程师”等。但这样 Title 对我们理解不同级别的能力要求,完全无用。“高…...

利用最小二乘法找圆心和半径
#include <iostream> #include <vector> #include <cmath> #include <Eigen/Dense> // 需安装Eigen库用于矩阵运算 // 定义点结构 struct Point { double x, y; Point(double x_, double y_) : x(x_), y(y_) {} }; // 最小二乘法求圆心和半径 …...

XML Group端口详解
在XML数据映射过程中,经常需要对数据进行分组聚合操作。例如,当处理包含多个物料明细的XML文件时,可能需要将相同物料号的明细归为一组,或对相同物料号的数量进行求和计算。传统实现方式通常需要编写脚本代码,增加了开…...

Linux应用开发之网络套接字编程(实例篇)
服务端与客户端单连接 服务端代码 #include <sys/socket.h> #include <sys/types.h> #include <netinet/in.h> #include <stdio.h> #include <stdlib.h> #include <string.h> #include <arpa/inet.h> #include <pthread.h> …...

【Linux】C语言执行shell指令
在C语言中执行Shell指令 在C语言中,有几种方法可以执行Shell指令: 1. 使用system()函数 这是最简单的方法,包含在stdlib.h头文件中: #include <stdlib.h>int main() {system("ls -l"); // 执行ls -l命令retu…...
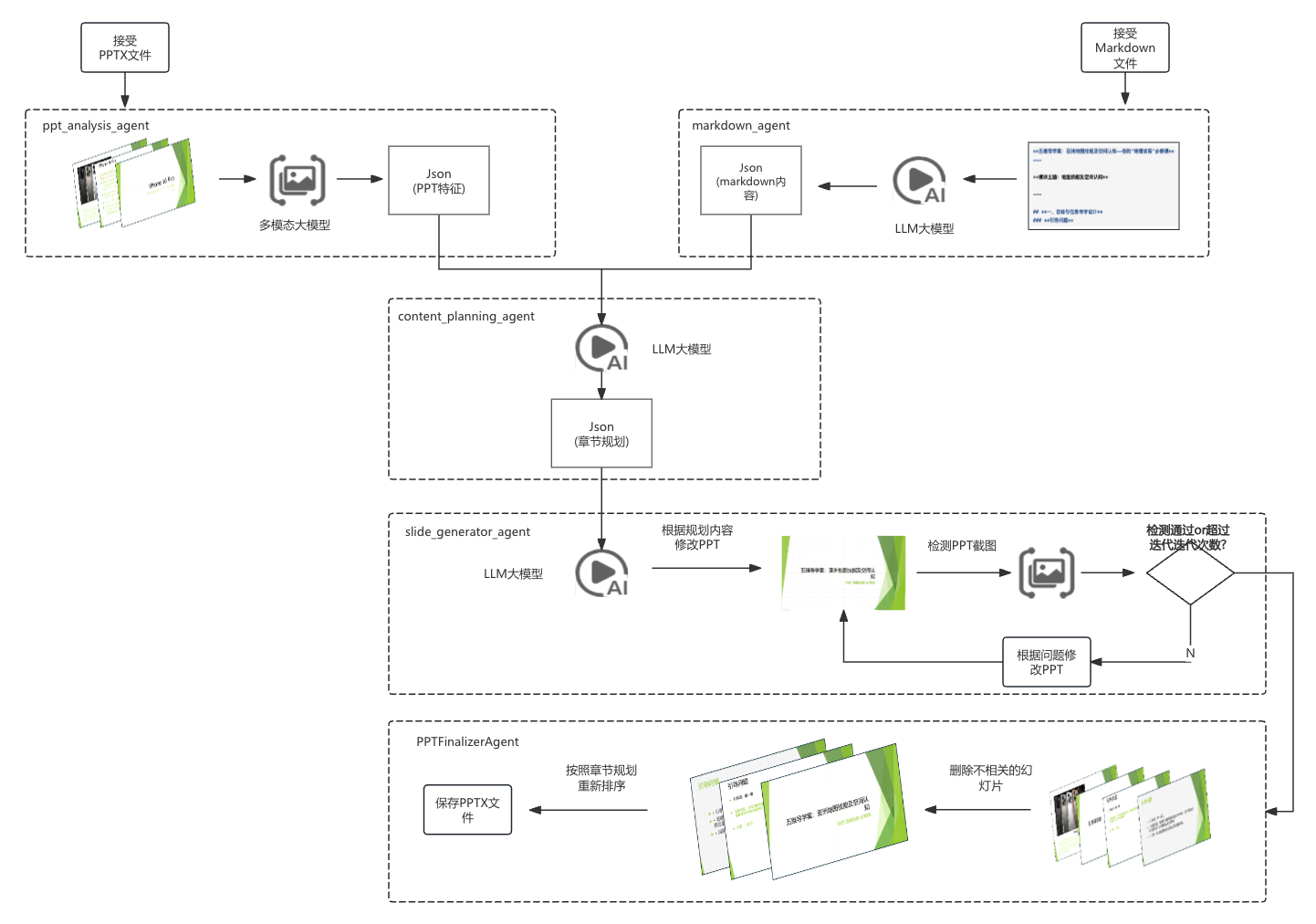
【项目实战】通过多模态+LangGraph实现PPT生成助手
PPT自动生成系统 基于LangGraph的PPT自动生成系统,可以将Markdown文档自动转换为PPT演示文稿。 功能特点 Markdown解析:自动解析Markdown文档结构PPT模板分析:分析PPT模板的布局和风格智能布局决策:匹配内容与合适的PPT布局自动…...
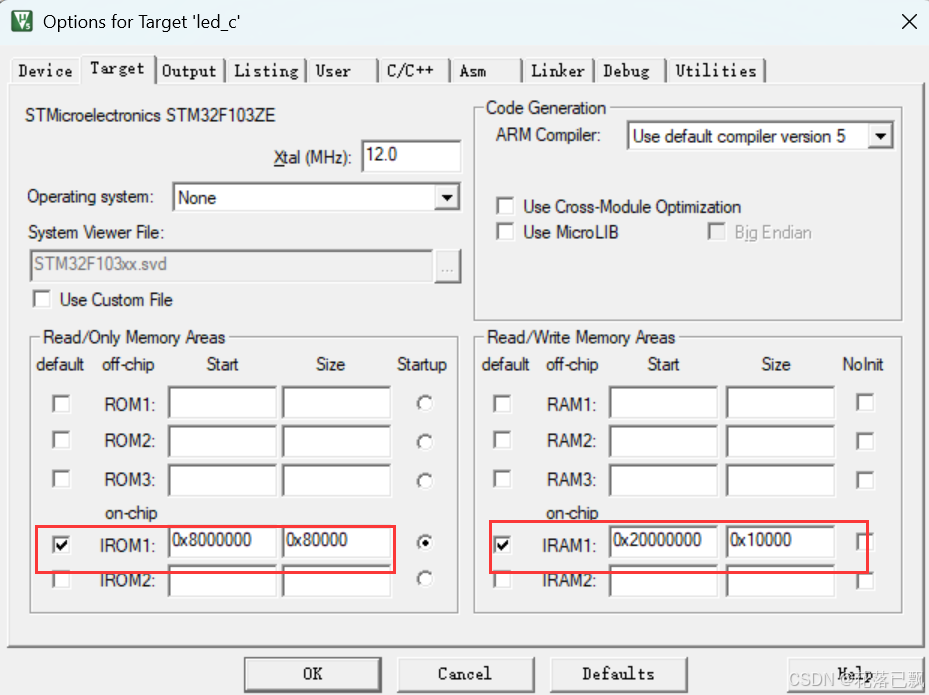
Keil 中设置 STM32 Flash 和 RAM 地址详解
文章目录 Keil 中设置 STM32 Flash 和 RAM 地址详解一、Flash 和 RAM 配置界面(Target 选项卡)1. IROM1(用于配置 Flash)2. IRAM1(用于配置 RAM)二、链接器设置界面(Linker 选项卡)1. 勾选“Use Memory Layout from Target Dialog”2. 查看链接器参数(如果没有勾选上面…...
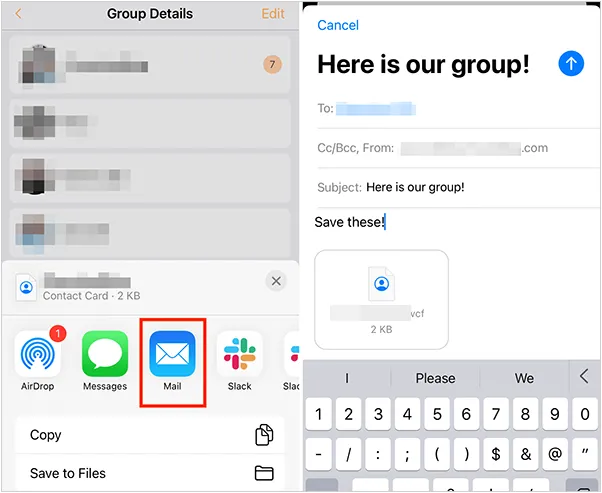
如何将联系人从 iPhone 转移到 Android
从 iPhone 换到 Android 手机时,你可能需要保留重要的数据,例如通讯录。好在,将通讯录从 iPhone 转移到 Android 手机非常简单,你可以从本文中学习 6 种可靠的方法,确保随时保持连接,不错过任何信息。 第 1…...

ETLCloud可能遇到的问题有哪些?常见坑位解析
数据集成平台ETLCloud,主要用于支持数据的抽取(Extract)、转换(Transform)和加载(Load)过程。提供了一个简洁直观的界面,以便用户可以在不同的数据源之间轻松地进行数据迁移和转换。…...
深入解析C++中的extern关键字:跨文件共享变量与函数的终极指南
🚀 C extern 关键字深度解析:跨文件编程的终极指南 📅 更新时间:2025年6月5日 🏷️ 标签:C | extern关键字 | 多文件编程 | 链接与声明 | 现代C 文章目录 前言🔥一、extern 是什么?&…...
什么是Ansible Jinja2
理解 Ansible Jinja2 模板 Ansible 是一款功能强大的开源自动化工具,可让您无缝地管理和配置系统。Ansible 的一大亮点是它使用 Jinja2 模板,允许您根据变量数据动态生成文件、配置设置和脚本。本文将向您介绍 Ansible 中的 Jinja2 模板,并通…...