VScode 调试 linux内核
VScode 调试 linux内核
这里调试的 linux 内核是通过 Linux+SD卡(rootfs)运行的内核
gdb 命令行调试
编辑 /home/tyustli/.gdbinit 文件,参考 【GDB】 .gdbinit 文件
set auto-load safe-path /home/tyustli/code/open_source/kernel/linux-6.5.7/.gdbinit
在 linux 源码项目的根目录新建 .gdbinit 文件
target remote localhost:1234
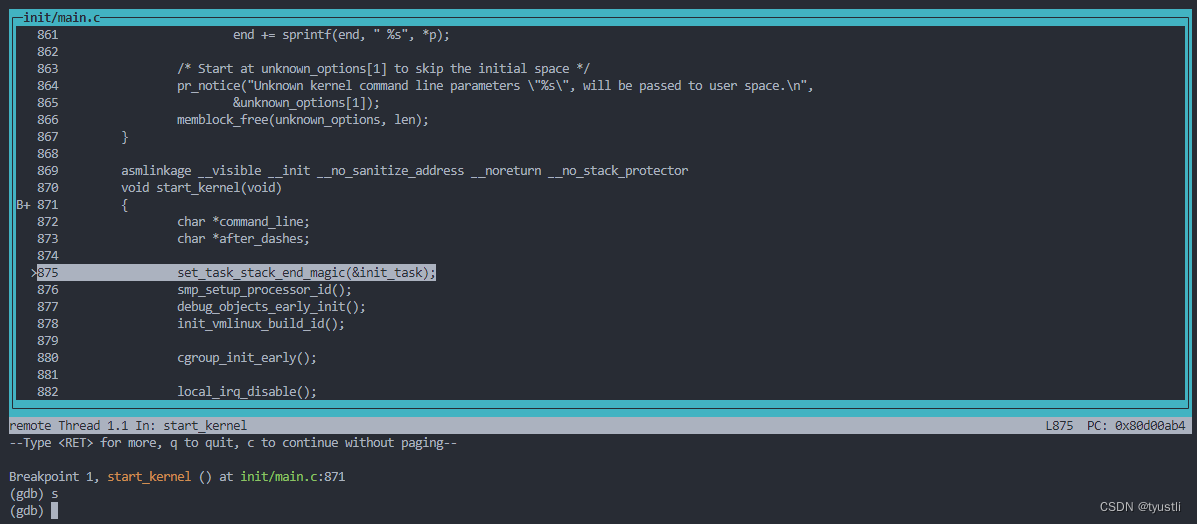
b start_kernel
layout src
c
先启动 linux 内核,让其等待 GDB 连接
# 启动之后等待 GDB 连接
sudo qemu-system-arm -M vexpress-a9 -m 512M -kernel arch/arm/boot/zImage -dtb arch/arm/boot/dts/arm/vexpress-v2p-ca9.dtb -nographic \
-append "root=/dev/mmcblk0 rw console=ttyAMA0" -sd /home/tyustli/code/open_source/busybox/rootfs.ext3 -s -S# -dtb 指定设备树,否则会失败
在编译 linux 的当前路径输入
arm-none-linux-gnueabihf-gdb vmlinux -se vmlinux
如果没有设置 /home/tyustli/.gdbinit 文件,那么对应的命令为
arm-none-linux-gnueabihf-gdb vmlinux -se vmlinux -x .gdbinit
即指定 .gdbinit 的文件为当前路径。需要注意的是,如果指定了 /home/tyustli/.gdbinit 文件,就不能加 -x .gdbinit
调试界面信息
VScode 调试
参考 qemu基础篇——VSCode 配置 GDB 调试
要想调试 kernel 只需要再添加一个 kernel 的配置即可
{"version": "0.2.0","configurations": [{// qemu 裸机调试配置"name": "qemu_bare","type": "cppdbg","request": "launch","program": "${workspaceFolder}/qemu_code/bare/example/0020_mmu/bsp.elf","args": [],"stopAtEntry": true,"cwd": "${workspaceFolder}/qemu_code/bare","environment": [],"externalConsole": false,"MIMode": "gdb","miDebuggerPath": "/home/tyustli/cross_tool/gcc-arm-10.3-2021.07-x86_64-arm-none-linux-gnueabihf/bin/arm-none-linux-gnueabihf-gdb","miDebuggerServerAddress": "localhost:1234",},{ // u-boot 调试配置"name": "u-boot","type": "cppdbg","request": "launch","program": "${workspaceFolder}/open_source/u-boot/u-boot","args": [],"stopAtEntry": true,"cwd": "${workspaceFolder}/open_source/u-boot","environment": [],"externalConsole": false,"MIMode": "gdb","miDebuggerPath": "/home/tyustli/cross_tool/gcc-arm-10.3-2021.07-x86_64-arm-none-linux-gnueabihf/bin/arm-none-linux-gnueabihf-gdb","miDebuggerServerAddress": "localhost:1234",},{ // linux kernel 调试配置"name": "linux_kernel","type": "cppdbg","request": "launch","program": "${workspaceFolder}/open_source/kernel/linux-6.5.7/vmlinux","args": [],"stopAtEntry": true,"cwd": "${workspaceFolder}/open_source/kernel/linux-6.5.7","environment": [],"externalConsole": false,"MIMode": "gdb","miDebuggerPath": "/home/tyustli/cross_tool/gcc-arm-10.3-2021.07-x86_64-arm-none-linux-gnueabihf/bin/arm-none-linux-gnueabihf-gdb","miDebuggerServerAddress": "localhost:1234",}]
}
有一点需要注意,如果使用 vscode 调试,就不能指定 /home/tyustli/.gdbinit 文件,或者将 /home/tyustli/code/open_source/kernel/linux-6.5.7/.gdbinit 文件的内容清空
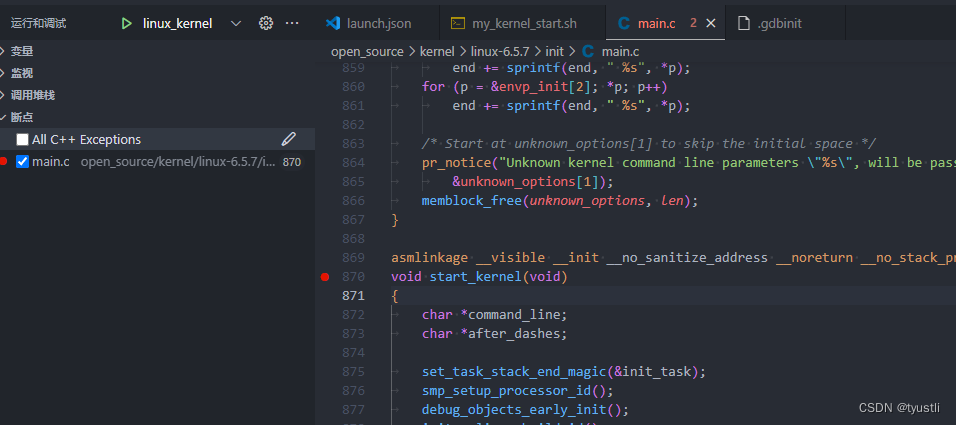
先在 start_kernel打好断点
先启动 linux 内核,让其等待 GDB 连接
# 启动之后等待 GDB 连接
sudo qemu-system-arm -M vexpress-a9 -m 512M -kernel arch/arm/boot/zImage -dtb arch/arm/boot/dts/arm/vexpress-v2p-ca9.dtb -nographic \
-append "root=/dev/mmcblk0 rw console=ttyAMA0" -sd /home/tyustli/code/open_source/busybox/rootfs.ext3 -s -S
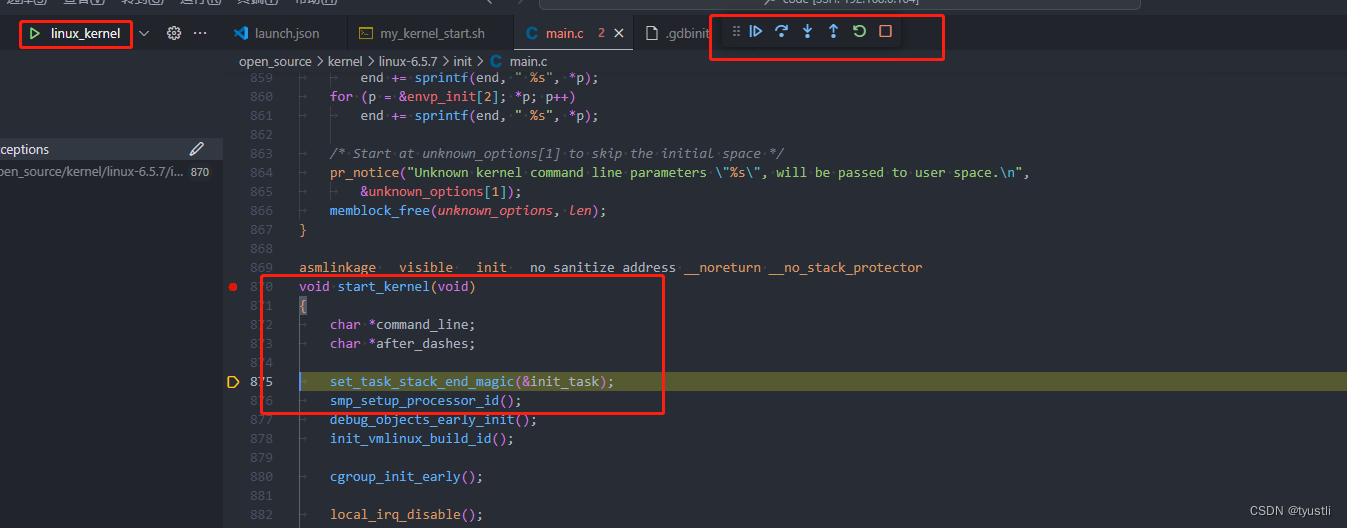
启动调试
相关文章:
VScode 调试 linux内核
VScode 调试 linux内核 这里调试的 linux 内核是通过 LinuxSD卡(rootfs)运行的内核 gdb 命令行调试 编辑 /home/tyustli/.gdbinit 文件,参考 【GDB】 .gdbinit 文件 set auto-load safe-path /home/tyustli/code/open_source/kernel/linux-6.5.7/.gdbinit在 lin…...
Babylonjs学习笔记(五)——创建PBR材质
书接上回,这里讨论PBR材质!!! // 创建天空盒/* */const createSkyBox (scene:Scene):void>{const envTex CubeTexture.CreateFromPrefilteredData(./env/environment.env,scene)scene.environmentTexture envTex;scene.cre…...

C++ -- 深入理解多态
前言:多态的概念,通俗地来讲就是多种形态。当我们要完成某个行为的时候,不同的对象去完成时会产生不同的状态,这就叫做多态。具体点就是去完成某个行为,当不同的对象去完成时会 产生出不同的状态。多态在C的类和对象中…...

【Java】泛型通配符
类型通配符 类型通配符<?> 一般用于接受使用,不能够做添加List<?>:表示元素类型未知的list,它的元素可以匹配任何类型带通配符的List仅表示它是各种泛型List的父类,并不能把元素添加到其中类型通配符上限࿱…...
NNDL:作业五
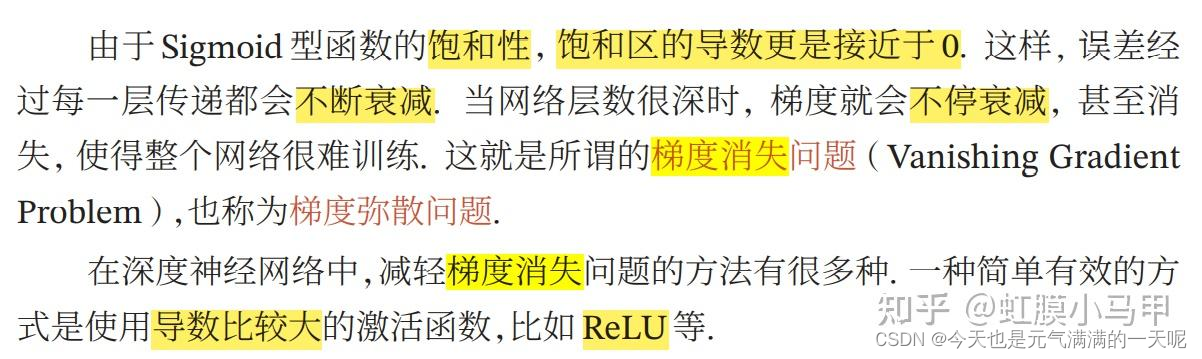
习题4-1 对于一个神经元,并使用梯度下降优化参数w时,如果输入x恒大于0,其收敛速度会比零均值化的输入更慢. 证明: 激活函数以sigmoid为例。 神经元:有两层,线性层和激活层:yw*xb,然后y‘sigmoid(y),也就是。 梯度…...
)
OpenAI大模型项目计划表(InsCode AI 创作助手)
OpenAI大模型项目计划表 阶段任务负责人开始日期完成日期立项确定项目目标和范围项目经理2023-05-012023-05-03确定项目团队和资源项目经理2023-05-042023-05-05确定项目时间表和里程碑项目经理2023-05-062023-05-10数据收集收集训练数据和标注数据团队2023-05-112023-05-20确…...
MyBatis入门的第一个程序
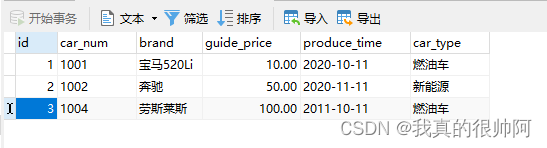
2023.10.28 今天正式开始MyBatis的学习,先来一个入门程序的编写。 ①准备一个数据库表: ②配置pom.xml文件:(打包方式和2个依赖的引入) <?xml version"1.0" encoding"UTF-8"?> <proj…...

React项目中使用zustand状态管理详细教程
zustand 是一个用于状态管理的小巧而强大的库,它与 React 非常兼容。以下是使用 zustand 在 React 项目中进行状态管理的详细教程: 步骤 1:安装 zustand 首先,你需要安装 zustand。你可以使用 npm 或 yarn 安装它: …...

Linux 扩展 root 文件系统
本文描述的是通过Linux自带的工具,不用安装额外的包,来实现root文件系统的扩展。 我们可以看到,根盘46.6G: # lsblk NAME MAJ:MIN RM SIZE RO TYPE MOUNTPOINT sda 8:0 0 46.6G 0 disk ├─sda1 …...

19c-rac环境安装AHF
准备给19c rac打补丁,发现tfa报错,如下 [rootdb1 /]# /u01/app/19.0.0/grid_1/OPatch/opatchauto apply /opt/update/35370167/35319490 -oh /u01/app/19.0.0/grid_1 OPatchauto session is initiated at Sat Oct 28 19:33:56 2023 System initializ…...

ESP32网络开发实例-Web控制按钮与硬件状态同步
Web控制按钮与硬件状态同步 文章目录 Web控制按钮与硬件状态同步1、应用介绍2、软件准备3、硬件准备4、代码实现在文中,我们将介绍同时使用网络服务器和物理按钮来控制 ESP32输出。 换句话说,如果用户使用按钮控制 LED,则 LED 的状态也会在 Web 服务器上自动更新。 1、应用介…...

分享一下怎么做陪诊小程序
在当今快节奏的社会中,人们的生活压力越来越大,尤其是在大城市中,由于工作繁忙,生活节奏快,很多人都感到看病难、看病贵的问题。为了解决这一问题,陪诊小程序应运而生。陪诊小程序是一种可以提供线上预约、…...
【Linux】Linux+Nginx部署项目
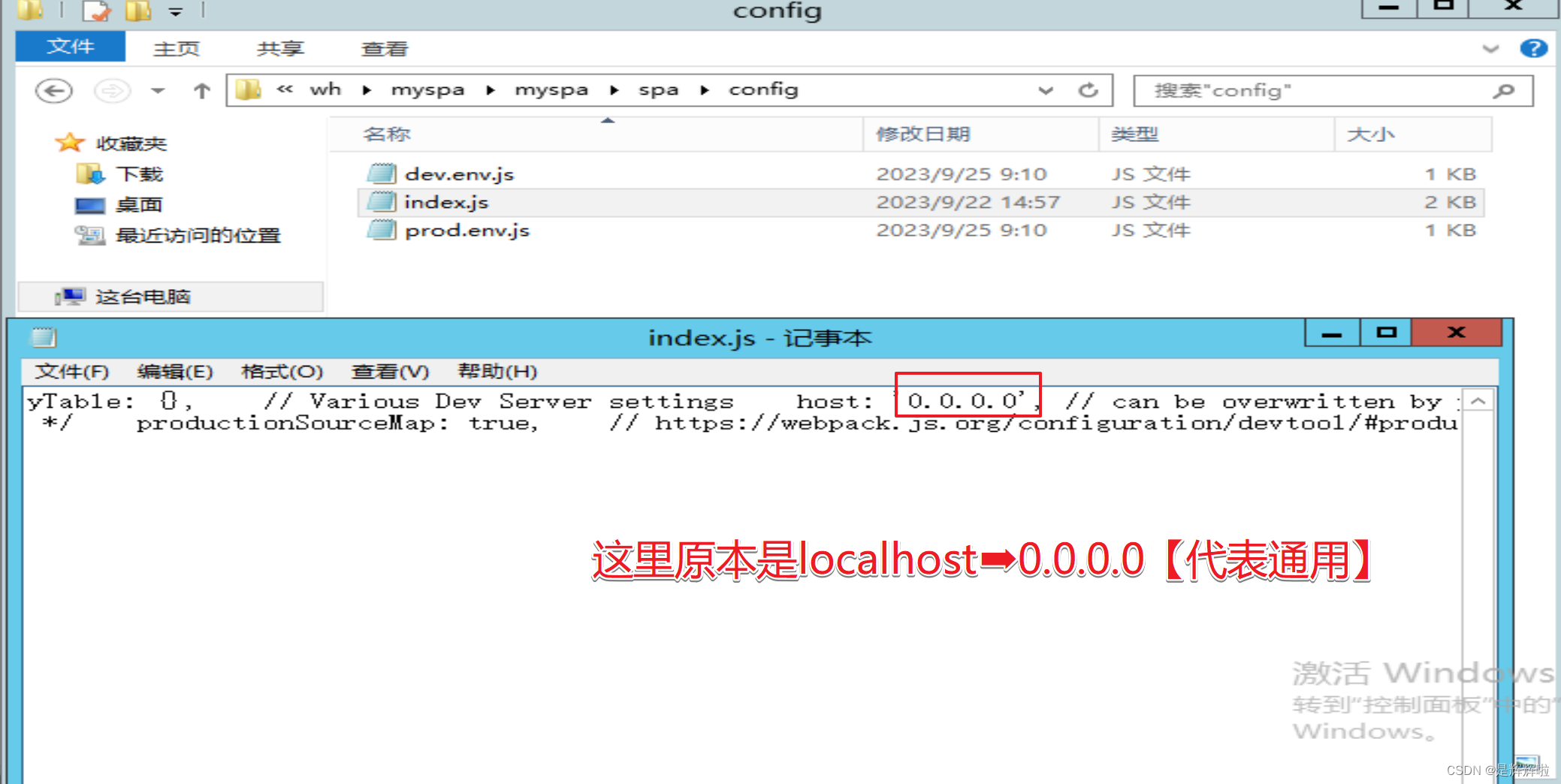
🥳🥳Welcome Huihuis Code World ! !🥳🥳 接下来看看由辉辉所写的关于Linux的相关操作吧 目录 🥳🥳Welcome Huihuis Code World ! !🥳🥳 一.单体项目的部署 0.我们需要将要进行部…...

【git命令】删除分支
1. 删除本地分支 使用git branch -d命令删除本地分支 git branch -d branch_name其中,branch_name是分支名。如果有未合并的更改,Git会阻止你删除分支。 使用git branch -D命令强制删除本地分支 git branch -D branch_name这个命令会强制删除分支&am…...

LabVIEW开发TDS1000 和TDS2000 系列泰克示波器
LabVIEW开发TDS1000 和TDS2000 系列泰克示波器 泰克示波器是经常用到的工具,一般手动操作即可,但有时候也要集成到系统中,需要程控。这时候先要下载厂家提供的例子,了解LabVIEW的demo。根据不用的示波器型号,选择和计…...

1. 两数之和、Leetcode的Python实现
博客主页:🏆看看是李XX还是李歘歘 🏆 🌺每天分享一些包括但不限于计算机基础、算法等相关的知识点🌺 💗点关注不迷路,总有一些📖知识点📖是你想要的💗 ⛽️今…...

TSINGSEE青犀基于AI视频识别技术的平安校园安防视频监控方案
一、背景需求 因学校频频出治安事件,所以必须要加强学校的安防工作,目前来看,大部分校园都建设了视频监控来预防保障校园安全。但是传统的视频监控系统,主要通过设备来录像以及人员时时监控来进行。这种监管方式效率十分低下&…...

基于LSTM encoder-decoder模型实现英文转中文的翻译机器
前言 神经网络机器翻译(NMT, neuro machine tranlation)是AIGC发展道路上的一个重要应用。正是对这个应用的研究,发展出了注意力机制,在此基础上产生了AIGC领域的霸主transformer。我们今天先把注意力机制这些东西放一边,介绍一个对机器翻译…...

世界前沿技术发展报告2023《世界航空技术发展报告》(四)无人机技术
(四)无人机技术 1.无人作战飞机1.1 美国空军披露可与下一代战斗机编组作战的协同式无人作战飞机项目1.2 俄罗斯无人作战飞机取得重要进展 2.支援保障无人机2.1 欧洲无人机项目通过首个里程碑2.2 美国海军继续开展MQ-25无人加油机测试工作 3.微小型无人机…...
【JAVA学习笔记】48 - 八大常用Wrapper类(包装类)
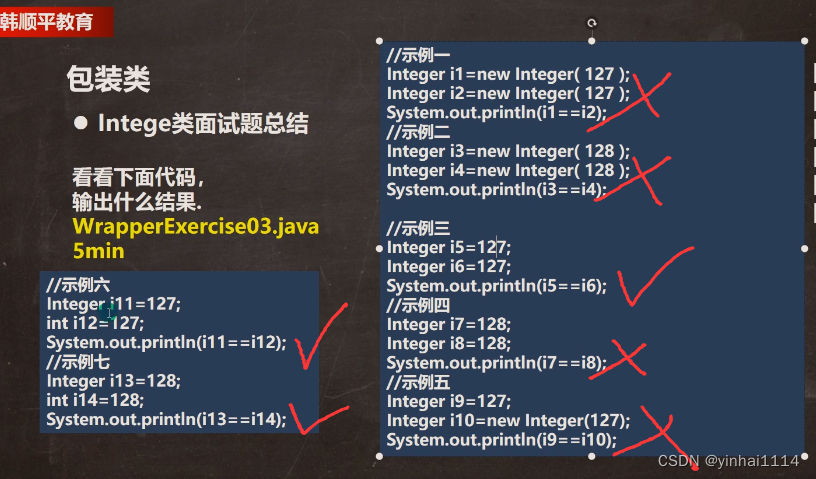
一、包装类 1.针对八种基本定义相应的引用类型一包装类 2.有了类的特点,就可以调用类中的方法。 黄色背景的表示父类是Number 二、包装类和基本数据的转换 演示包装类和基本数据类型的相互转换,这里以int和Integer演示。 1.jdk5前的手动装箱和拆箱方…...
Vue3 + Element Plus + TypeScript中el-transfer穿梭框组件使用详解及示例
使用详解 Element Plus 的 el-transfer 组件是一个强大的穿梭框组件,常用于在两个集合之间进行数据转移,如权限分配、数据选择等场景。下面我将详细介绍其用法并提供一个完整示例。 核心特性与用法 基本属性 v-model:绑定右侧列表的值&…...

MVC 数据库
MVC 数据库 引言 在软件开发领域,Model-View-Controller(MVC)是一种流行的软件架构模式,它将应用程序分为三个核心组件:模型(Model)、视图(View)和控制器(Controller)。这种模式有助于提高代码的可维护性和可扩展性。本文将深入探讨MVC架构与数据库之间的关系,以…...
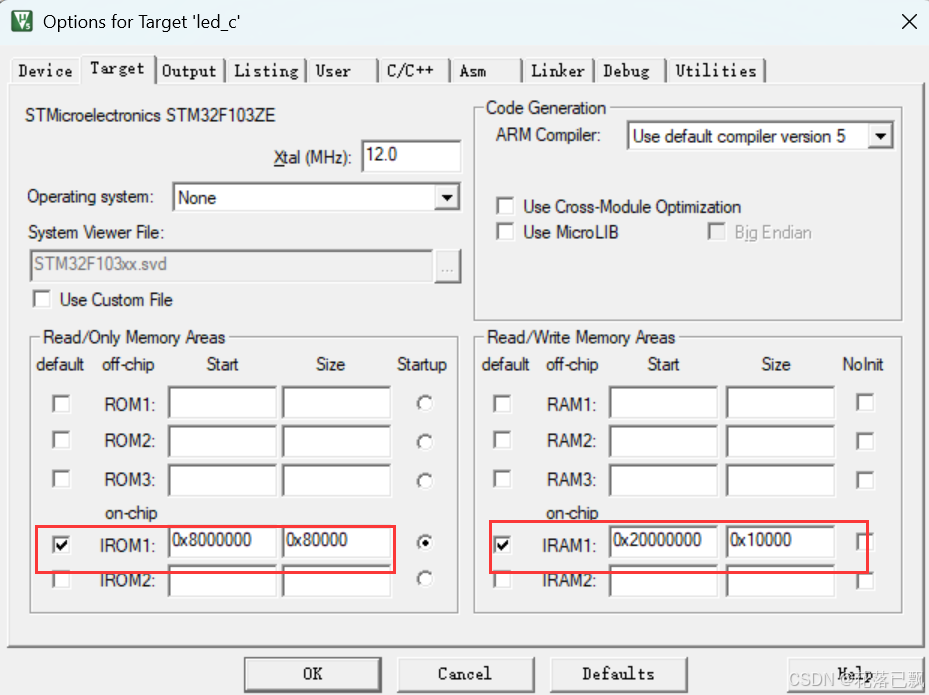
Keil 中设置 STM32 Flash 和 RAM 地址详解
文章目录 Keil 中设置 STM32 Flash 和 RAM 地址详解一、Flash 和 RAM 配置界面(Target 选项卡)1. IROM1(用于配置 Flash)2. IRAM1(用于配置 RAM)二、链接器设置界面(Linker 选项卡)1. 勾选“Use Memory Layout from Target Dialog”2. 查看链接器参数(如果没有勾选上面…...
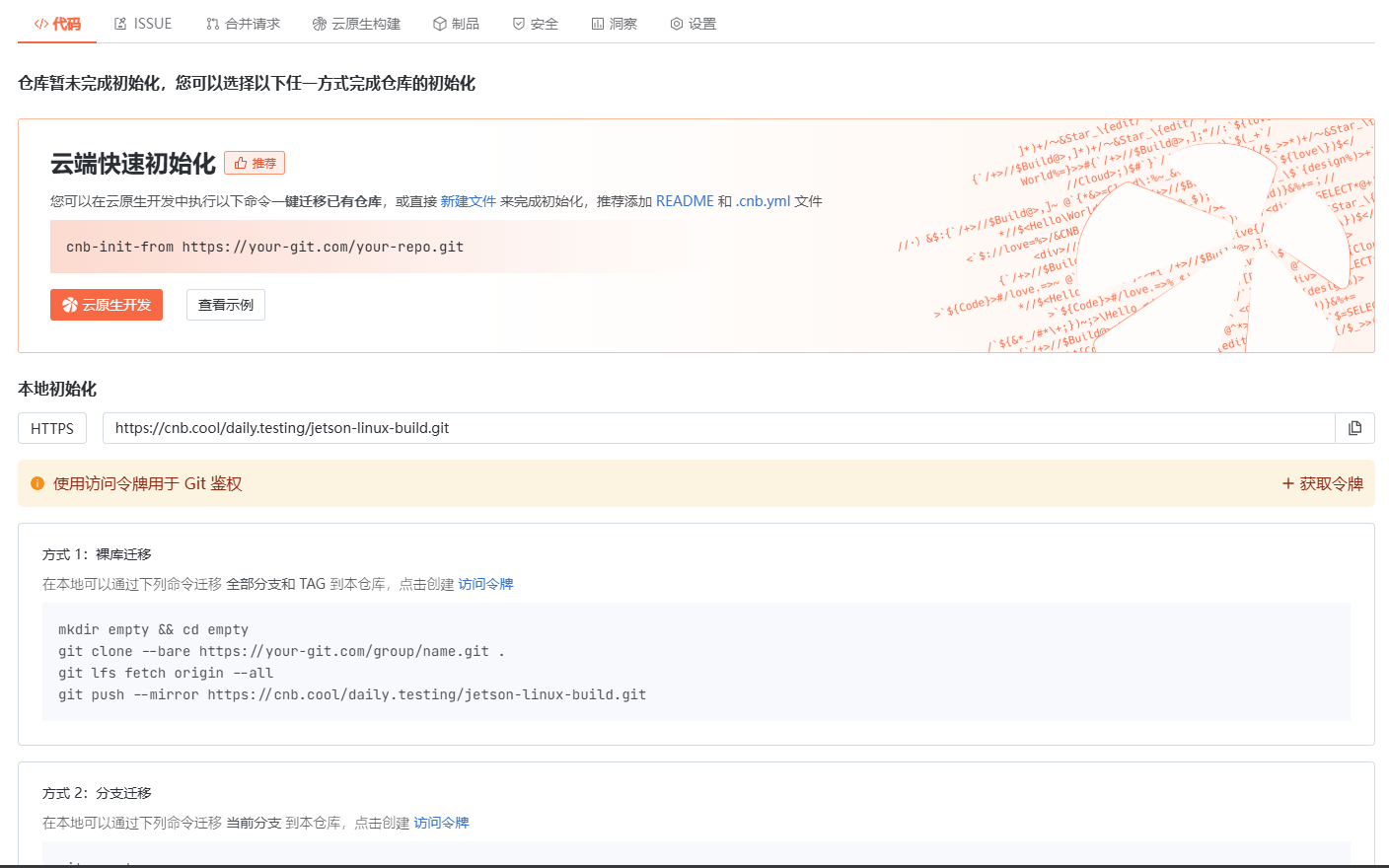
云原生玩法三问:构建自定义开发环境
云原生玩法三问:构建自定义开发环境 引言 临时运维一个古董项目,无文档,无环境,无交接人,俗称三无。 运行设备的环境老,本地环境版本高,ssh不过去。正好最近对 腾讯出品的云原生 cnb 感兴趣&…...
详细解析)
Caliper 负载(Workload)详细解析
Caliper 负载(Workload)详细解析 负载(Workload)是 Caliper 性能测试的核心部分,它定义了测试期间要执行的具体合约调用行为和交易模式。下面我将全面深入地讲解负载的各个方面。 一、负载模块基本结构 一个典型的负载模块(如 workload.js)包含以下基本结构: use strict;/…...
windows系统MySQL安装文档
概览:本文讨论了MySQL的安装、使用过程中涉及的解压、配置、初始化、注册服务、启动、修改密码、登录、退出以及卸载等相关内容,为学习者提供全面的操作指导。关键要点包括: 解压 :下载完成后解压压缩包,得到MySQL 8.…...

在RK3588上搭建ROS1环境:创建节点与数据可视化实战指南
在RK3588上搭建ROS1环境:创建节点与数据可视化实战指南 背景介绍完整操作步骤1. 创建Docker容器环境2. 验证GUI显示功能3. 安装ROS Noetic4. 配置环境变量5. 创建ROS节点(小球运动模拟)6. 配置RVIZ默认视图7. 创建启动脚本8. 运行可视化系统效果展示与交互技术解析ROS节点通…...

【java】【服务器】线程上下文丢失 是指什么
目录 ■前言 ■正文开始 线程上下文的核心组成部分 为什么会出现上下文丢失? 直观示例说明 为什么上下文如此重要? 解决上下文丢失的关键 总结 ■如果我想在servlet中使用线程,代码应该如何实现 推荐方案:使用 ManagedE…...
——Oracle for Linux物理DG环境搭建(2))
Oracle实用参考(13)——Oracle for Linux物理DG环境搭建(2)
13.2. Oracle for Linux物理DG环境搭建 Oracle 数据库的DataGuard技术方案,业界也称为DG,其在数据库高可用、容灾及负载分离等方面,都有着非常广泛的应用,对此,前面相关章节已做过较为详尽的讲解,此处不再赘述。 需要说明的是, DG方案又分为物理DG和逻辑DG,两者的搭建…...

视觉slam--框架
视觉里程计的框架 传感器 VO--front end VO的缺点 后端--back end 后端对什么数据进行优化 利用什么数据进行优化的 后端是怎么进行优化的 回环检测 建图 建图是指构建地图的过程。 构建的地图是点云地图还是什么信息的地图? 建图并没有一个固定的形式和算法…...