激光雷达点云基础-点云滤波算法与NDT匹配算法
激光雷达点云处理在五年前就做了较多的工作,最近有一些新的接触发现激光雷达代码原理五年前未见重大更新,或许C++与激光雷达结合本身就是比较高的技术门槛。深度学习调包侠在硬核激光雷达技术面前可以说是完全的自愧不如啊。
1、点云滤波
在获取点云数据时,由于设备精度、操作者经验、环境因素等带来的影响,点云数据中将不可避免地出现一些噪声点。而滤波的作用就是利用数据的低频特性剔除离群数据,并进行数据平滑或者提取特定频段特征。
对应的问题是什么时候需要做点云滤波?大概可以分为以下四个方面:1、点云数据密度不规则需要平滑;2、因为遮挡等问题造成离群点需要去除;3、大量数据需要进行下采样;4、噪音数据需要去除。
1.1 常用的点云滤波器:
-
直通滤波器 条件滤波器
-
高斯滤波器 双边滤波器 统计滤波器 半径滤波器 频率滤波器
-
体素滤波器
从功能层面以上点云滤波器可以分为三类使用:直通和条件滤波用于预处理的最前端提取出感兴趣区域;体素滤波用于对密集点云进行下采样减少数据量;其他滤波器用于平滑点云同时去除离散点。
1.2 点云滤波器介绍:
- 直通滤波器
原理:在点云的指定维度上设置一个阈值范围,将这个维度上的数据分为在阈值范围内与不在阈值范围内,从而选择过滤与否。能够快速过滤掉用户自定义区间范围内的点云。
在实际应用中,由于激光扫描采集的距离较远,但是根据功能需求的不同可能只关心一定区域内的数据,比如低速物流车的运营场景,可能在X方向只关心前后60米,Y方向只关心左右20米的范围。此时就可以利用直通滤波器提取出感兴趣区域,可较快剔除部分点云,达到第一步粗处理的目的。
- 条件滤波器
原理:通过设定滤波条件进行滤波,类似于分段函数,判断点云是否在规则的范围则中,如果不在则舍弃。上述的直通滤波器就是一种较简单的条件滤波器。
- 高斯滤波器
原理:采用加权平均方式的一种非线性滤波器,在指定域内的权重是根据欧式距离的高斯分布,通过权重加权平均的方式得到当前点的滤波后的点。
特点:利用标准差去噪,适用于呈正态分布的数据平滑效果较好,但是边缘角点也会被较大的平滑。
- 双边滤波器
原理:通过取邻近采样点的加权平均来修正当前采样点的位置,在高斯滤波器只考虑空间域点的位置基础上,增加了维度上的权重。一定程度上弥补了高斯滤波的缺点。
特点:既有效地对空间三维模型表面进行降噪,又可以保持点云数据中的几何特征信息,避免三维点云数据被过渡光滑。但是只适用于有序点云。关于高斯滤波和双边滤波,本身在图像领域其实已经有广泛的应用,具体的算法原理可以参考保边滤波–bilateral filter and guided filter
。
- 体素滤波器
原理:通过对输入的点云数据创建一个三维体素栅格,然后在每个体素内,用体素中所有点的重心来近似显示体素中的其他点,这样该体素内所有点就用一个重心点最终表示。也有另外一种相似的表达形式:利用每一个体素立方体的中心来近似该体素立方体内的所有点,相比上一种方法计算速度较快,但是损失了原始点云局部形态的精细度。
特点:可以达到向下采样同时不破坏点云本身几何结构的功能。点云几何结构不仅是宏观的几何外形,也包括其微观的排列方式,比如横向相似的尺寸,纵向相同的距离。随机下采样虽然效率比体素网格滤波器高,但会破坏点云微观结构。
以上几种滤波器不会针对离散群点做相关操作,但是实际上离散群点这类噪声点会对整体算法带来比较严重的干扰。离散群点会破坏点云的表达准确性。使得局部点云特征(例如表面法线或曲率变化)的估计变得非常复杂,这往往导致错误的估计结果,从而可能导致点云配准失败。
- 统计滤波器
原理:对每个点的邻域进行一个统计分析,并修剪掉那些不符合一定标准的点。我们的稀疏离群点移除方法基于在输入数据中对点到临近点的距离分布的计算。
具体方法如下:计算每个点到其最近的k个点平均距离,(假设得到的结果是一个高斯分布,其形状是由均值和标准差决定),那么平均距离在标准范围之外的点,可以被定义为离群点并从数据中去除。
特点:主要是根据密度去除离群点,对密度差异较大的离群点去除效果较好。
- 半径滤波器
原理:与统计滤波器类似,只是操作更加暴力直观,根据空间点半径范围临近点数量来滤波。
具体方法如下:
在点云数据中以某点为中心画一个圆计算落在该圆中点的数量,当数量大于给定值时,则保留该点,数量小于给定值则剔除该点。此算法运行速度快,依序迭代留下的点一定是最密集的,但是圆的半径和圆内点的数目都需要人工指定。
特点:用于去除离群点,在一定程度上可以用来筛选边缘点。

- 频率滤波器
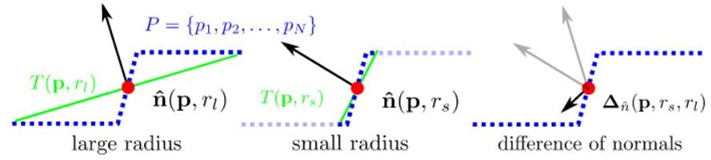
原理:在点云处理中,点云法线向量差为点云所表达的信号。用点云的曲率来表示频率信息,如果某处点云曲率大,则点云表达的是一个变化高频的信号。如果点云曲率小,则点云表达的是一个不变低频的信号。例如:地面曲率小,它表达的信息量也小;障碍物处曲率大,频率就会更高。
以DoN算法为例,根据不同尺度下法向量特征的差异性,利用pcl::DifferenceOfNormalsEstimation实现点云分割,在处理有较大尺度变化的场景点云分割效果较好,利用不同支撑半径去估算同一点的两个单位法向量,单位法向量的差定义DoN特征。具体如下:在小尺度上计算点云法线1,在大尺度上计算点云法线2,法线1-法线2,滤去3中值较小的点,根据第三步得到的法线差,进行欧式分割。
特点:在小尺度上是可以对高频信息进行检测的,可以很好的小尺度高频信息。其在大规模点云中优势尤其明显。
DoN特征源于观察到基于所给半径估计的表面法向量可以反映曲面的内在几何特征,因此这种分割算法是基于法线估计的,需要计算点云中某一点的法线估计。而通常在计算法线估计的时候都会用到邻域信息,很明显邻域大小的选取会影响法线估计的结果。
而在DoN算法中,邻域选择的大小就被称为support radius。对点云中某一点选取不同的支持半径,即可以得到不同的法线估计,而法线之间的差异,就是是所说的法线差异。
2、NDT匹配算法
相关文章:
激光雷达点云基础-点云滤波算法与NDT匹配算法
激光雷达点云处理在五年前就做了较多的工作,最近有一些新的接触发现激光雷达代码原理五年前未见重大更新,或许C与激光雷达结合本身就是比较高的技术门槛。深度学习调包侠在硬核激光雷达技术面前可以说是完全的自愧不如啊。 1、点云滤波 在获取点云数据…...

回收废品抢派单小程序开源版开发
回收废品派单抢派单小程序开源版开发 在这个废品回收抢单派单小程序开源版开发中,我们将构建一个专业且富有趣味性的平台,以深度的模式来重塑废品回收体验。 我们将提供一个会员注册功能,用户可以通过小程序授权注册和手机号注册两种方式快…...

粤嵌实训医疗项目--day04(Vue + SpringBoot)
往期回顾 粤嵌实训医疗项目--day03(Vue SpringBoot)-CSDN博客粤嵌实训医疗项目day02(Vue SpringBoot)-CSDN博客粤嵌实训医疗项目--day01(VueSpringBoot)-CSDN博客 目录 一、用户详细信息查询 (查询信息与…...
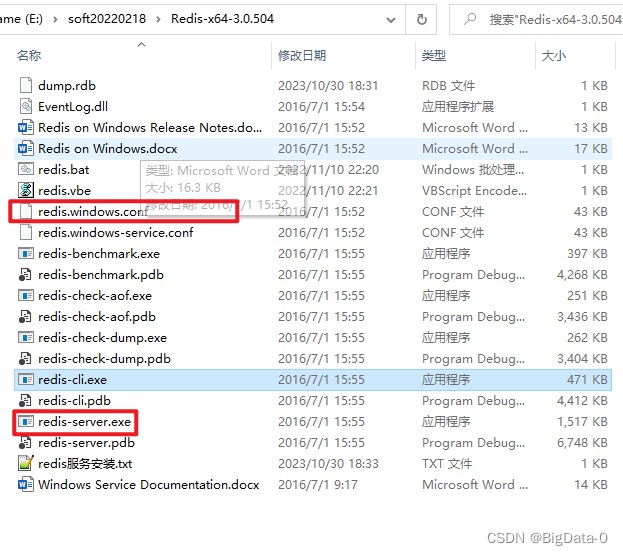
redis加入window服务及删除
1、命令redis-server.exe --service-install redis.windows.conf,在服务中可配置自动启动 删除redis服务,先停止redis服务运行,管理员cmd模式,sc delete "redis" ,...
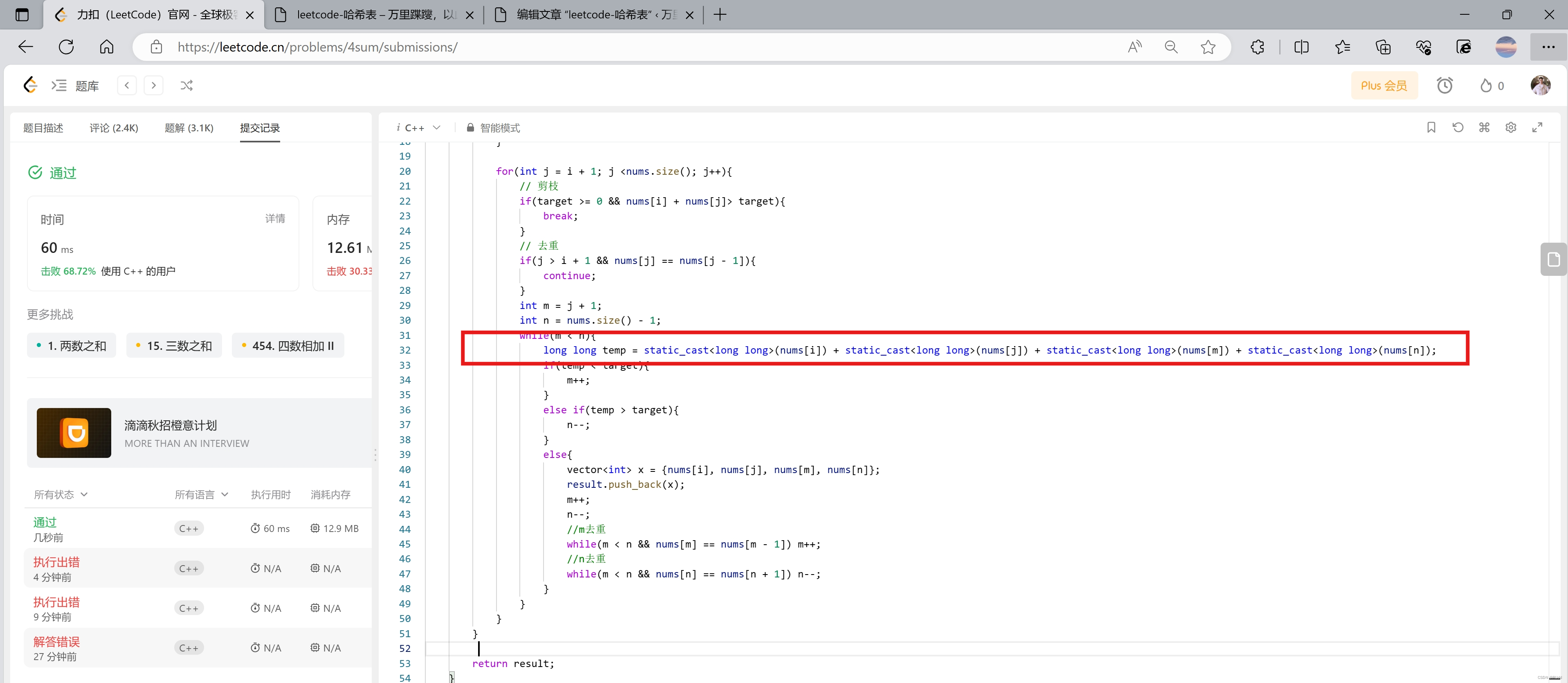
leetcode-哈希表
1. 理论 从哈希表的概念、哈希碰撞、哈希表的三种实现方式进行学习 哈希表:用来快速判断一个元素是否出现集合里。也就是查值就能快速判断,O(1)复杂度; 哈希碰撞:拉链法,线性探测法等。只是一种…...

NOIP2023模拟6联测27 旅行
题目大意 有一个有 n n n个点 n n n条边的无向连通图,一开始每条边都有一个颜色 c c c。 有 m m m次操作,每次操作将一条两个端点为 x , y x,y x,y的边的颜色修改为 c c c。求每次修改之后,图中有多少个颜色相同的连通块。 一个颜色相同的…...
【表面缺陷检测】钢轨表面缺陷检测数据集介绍(2类,含xml标签文件)
一、介绍 钢轨表面缺陷检测是指通过使用各种技术手段和设备,对钢轨表面进行检查和测量,以确定是否存在裂纹、掉块、剥离、锈蚀等缺陷的过程。这些缺陷可能会对铁路运输的安全和稳定性产生影响,因此及时进行检测和修复非常重要。钢轨表面缺陷…...

SHCTF 2023 新生赛 Web 题解
Web [WEEK1]babyRCE 源码过滤了cat 空格 我们使用${IFS}替换空格 和转义获得flag [WEEK1]飞机大战 源码js发现unicode编码 \u005a\u006d\u0078\u0068\u005a\u0033\u0074\u006a\u0059\u006a\u0045\u007a\u004d\u007a\u0067\u0030\u005a\u0069\u0030\u0031\u0059\u006d\u0045…...
二叉树题目合集(C++)
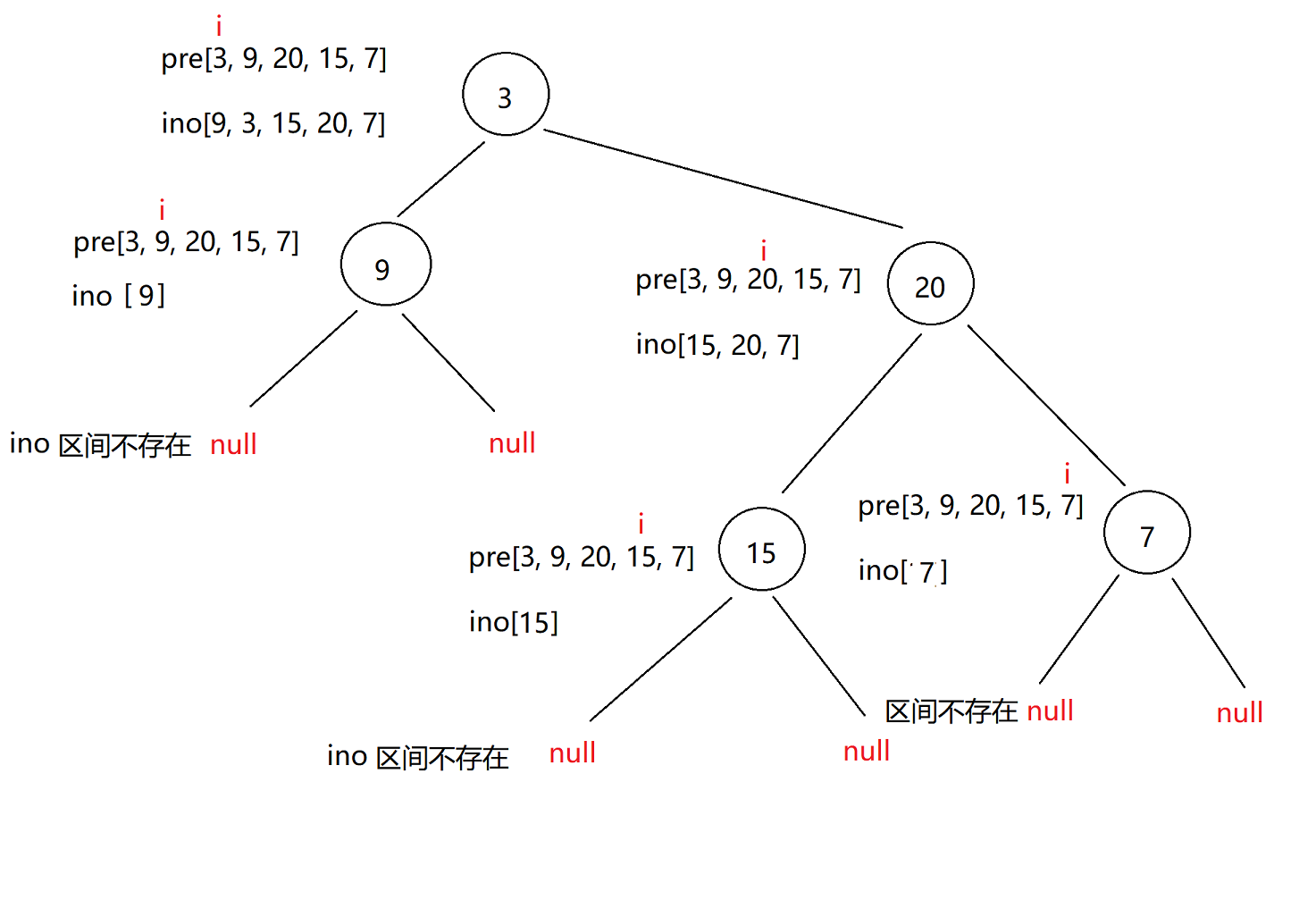
二叉树题目合集 1.二叉树创建字符串(简单)2.二叉树的分层遍历(中等)3.二叉树的最近公共祖先(中等)4.二叉树搜索树转换成排序双向链表(中等)5.根据树的前序遍历与中序遍历构造二叉树&…...
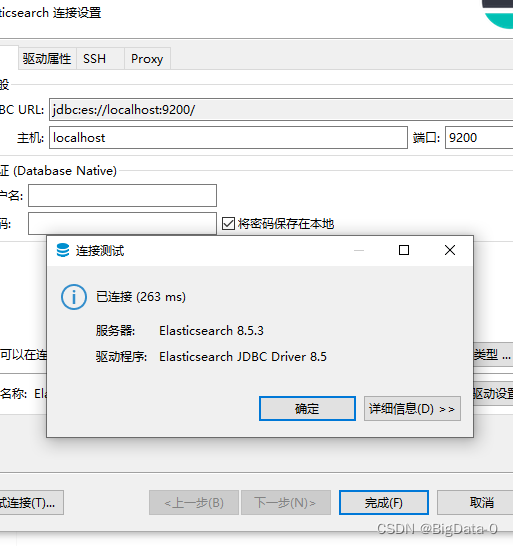
dbeaver配置es连接org.elasticsearch.xpack.sql.jdbc.EsDriver
查看目标es服务版本,下载对应驱动...

有监督学习线性回归
1、目标分析(回归问题还是分类问题?) 2、获取、处理数据 3、创建线性回归模型 4、训练模型 5、模型测试 x_data [[6000, 58], [9000, 77], [11000, 89], [15000, 54]] # 样本特征数据 y_data [30000, 55010, 73542, 63201] # 样本目标数…...
如何在vscode中添加less插件
Less (Leaner Style Sheets 的缩写) 是一门向后兼容的 CSS 扩展语言。它对CSS 语言增加了少许方便的扩展,通过less可以编写更少的代码实现更强大的样式。但less不是css,浏览器不能直接识别,即浏览器无法执行less代码&a…...
mediapipe 训练自有图像数据分类
参考: https://developers.google.com/mediapipe/solutions/customization/image_classifier https://colab.research.google.com/github/googlesamples/mediapipe/blob/main/examples/customization/image_classifier.ipynb#scrollToplvO-YmcQn5g 安装:…...
函数)
【pytorch】torch.gather()函数
dim0时 index[ [x1,x2,x2],[y1,y2,y2],[z1,z2,z3] ]如果dim0 填入方式为: index[ [(x1,0),(x2,1),(x3,2)][(y1,0),(y2,1),(y3,2)][(z1,0),(z2,1),(z3,2)] ]input [[1, 2, 3, 4],[5, 6, 7, 8],[9, 10, 11, 12] ] # shape(3,4) input torch.…...

Mac 安装psycopg2,报错Error: pg_config executable not found.
在mac 上安装psycopg2的方法:执行:pip3 install psycopg2-binary。 如果执行pip3 install psycopg2,无法安装psycopg2 报错信息如下: Collecting psycopg2Using cached psycopg2-2.9.9.tar.gz (384 kB)Preparing metadata (set…...

域名系统 DNS
DNS 概述 域名系统 DNS(Domain Name System)是因特网使用的命名系统,用来把便于人们使用的机器名字转换成为 IP 地址。域名系统其实就是名字系统。为什么不叫“名字”而叫“域名”呢?这是因为在这种因特网的命名系统中使用了许多的“域(domain)”&#x…...
Vue $nextTick 模板解析后在执行的函数
this.$nextTick(()>{ 模板解析后在执行的函数 })...

VBA技术资料MF76:将自定义颜色添加到调色板
我给VBA的定义:VBA是个人小型自动化处理的有效工具。利用好了,可以大大提高自己的工作效率,而且可以提高数据的准确度。我的教程一共九套,分为初级、中级、高级三大部分。是对VBA的系统讲解,从简单的入门,到…...

zilong-20231030
1)k个反转 2)n!转12进制 求末尾多少0 一共有几位 (考虑了溢出问题) 3)大量数据获取前10个 4)reemap地城结构 5)红黑树规则特性 6)热更 7)压测 8)业务 跨服实现 9)有哪些线程以及怎么分配...
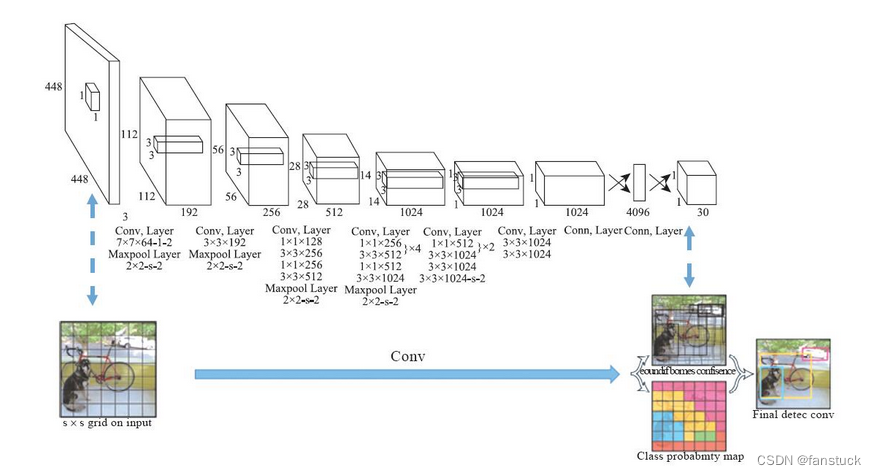
目标检测算法发展史
前言 比起图像识别,现在图片生成技术要更加具有吸引力,但是要步入AIGC技术领域,首先不推荐一上来就接触那些已经成熟闭源的包装好了再提供给你的接口网站,会使用别人的模型生成一些图片就能叫自己会AIGC了吗?那样真正…...
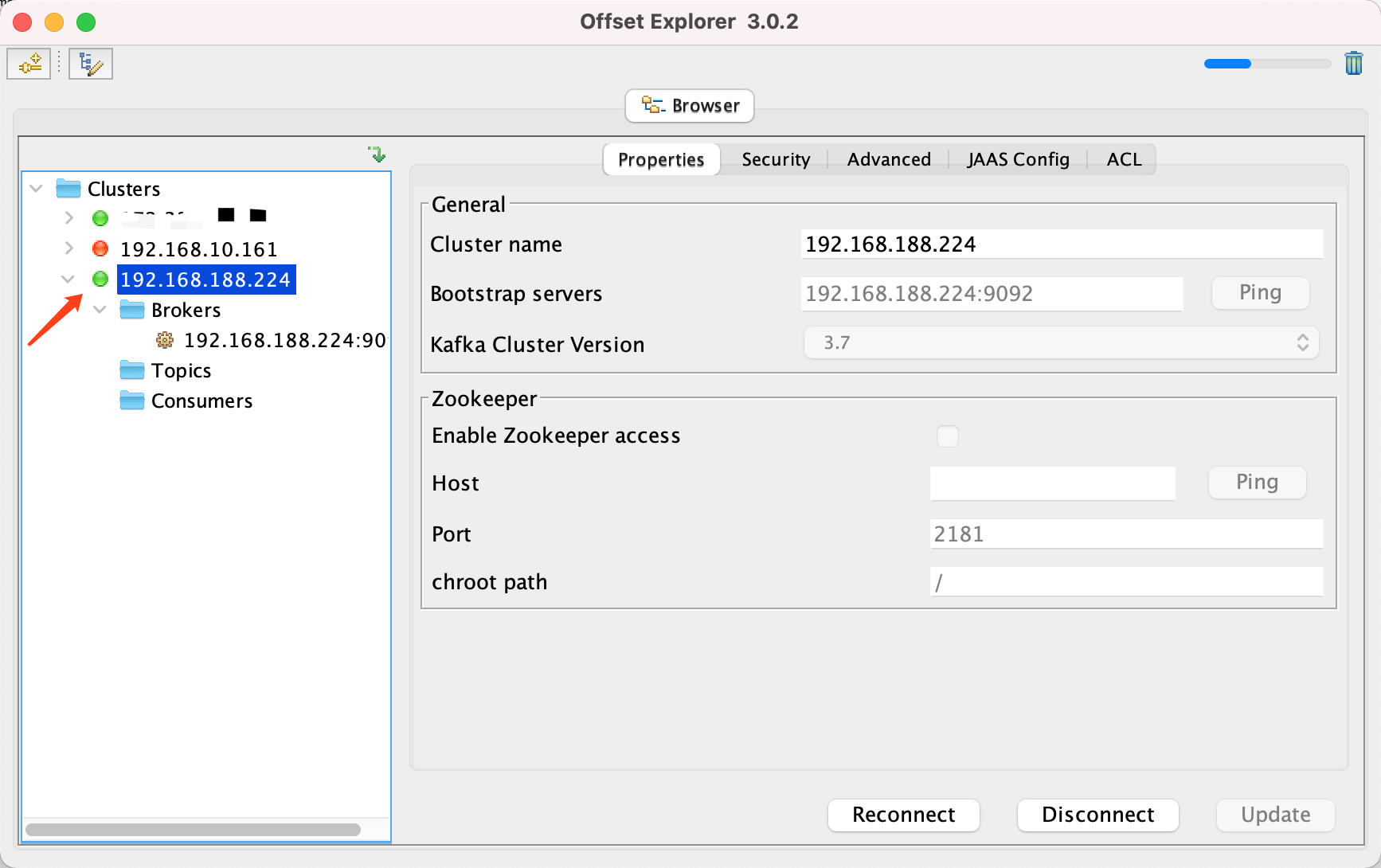
Docker 运行 Kafka 带 SASL 认证教程
Docker 运行 Kafka 带 SASL 认证教程 Docker 运行 Kafka 带 SASL 认证教程一、说明二、环境准备三、编写 Docker Compose 和 jaas文件docker-compose.yml代码说明:server_jaas.conf 四、启动服务五、验证服务六、连接kafka服务七、总结 Docker 运行 Kafka 带 SASL 认…...

《Playwright:微软的自动化测试工具详解》
Playwright 简介:声明内容来自网络,将内容拼接整理出来的文档 Playwright 是微软开发的自动化测试工具,支持 Chrome、Firefox、Safari 等主流浏览器,提供多语言 API(Python、JavaScript、Java、.NET)。它的特点包括&a…...
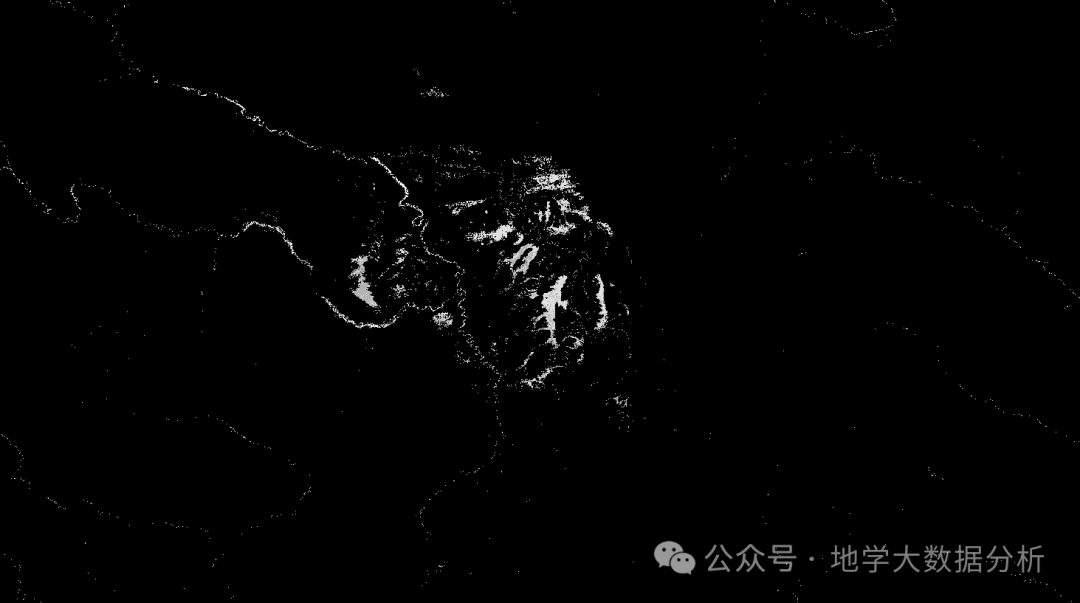
全球首个30米分辨率湿地数据集(2000—2022)
数据简介 今天我们分享的数据是全球30米分辨率湿地数据集,包含8种湿地亚类,该数据以0.5X0.5的瓦片存储,我们整理了所有属于中国的瓦片名称与其对应省份,方便大家研究使用。 该数据集作为全球首个30米分辨率、覆盖2000–2022年时间…...

鸿蒙中用HarmonyOS SDK应用服务 HarmonyOS5开发一个生活电费的缴纳和查询小程序
一、项目初始化与配置 1. 创建项目 ohpm init harmony/utility-payment-app 2. 配置权限 // module.json5 {"requestPermissions": [{"name": "ohos.permission.INTERNET"},{"name": "ohos.permission.GET_NETWORK_INFO"…...
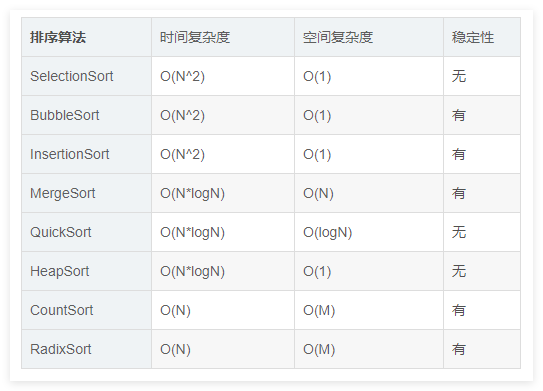
排序算法总结(C++)
目录 一、稳定性二、排序算法选择、冒泡、插入排序归并排序随机快速排序堆排序基数排序计数排序 三、总结 一、稳定性 排序算法的稳定性是指:同样大小的样本 **(同样大小的数据)**在排序之后不会改变原始的相对次序。 稳定性对基础类型对象…...

【无标题】路径问题的革命性重构:基于二维拓扑收缩色动力学模型的零点隧穿理论
路径问题的革命性重构:基于二维拓扑收缩色动力学模型的零点隧穿理论 一、传统路径模型的根本缺陷 在经典正方形路径问题中(图1): mermaid graph LR A((A)) --- B((B)) B --- C((C)) C --- D((D)) D --- A A -.- C[无直接路径] B -…...
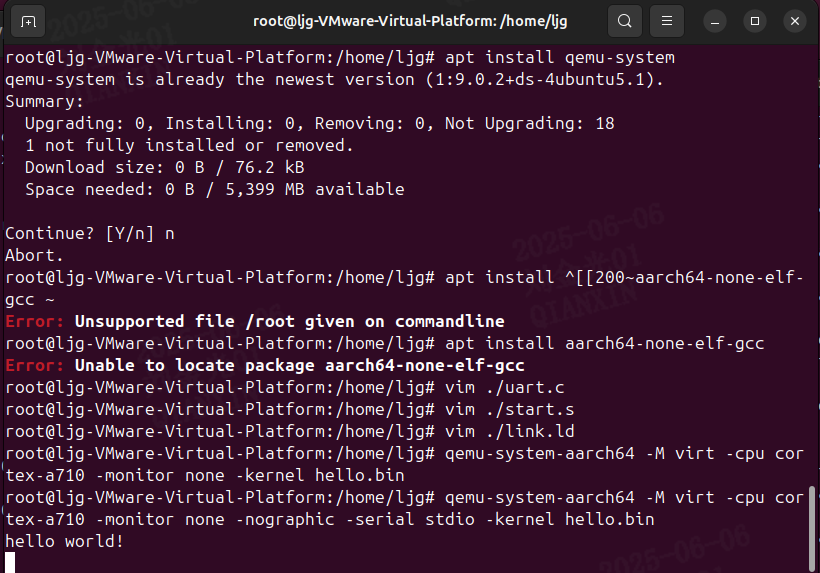
Qemu arm操作系统开发环境
使用qemu虚拟arm硬件比较合适。 步骤如下: 安装qemu apt install qemu-system安装aarch64-none-elf-gcc 需要手动下载,下载地址:https://developer.arm.com/-/media/Files/downloads/gnu/13.2.rel1/binrel/arm-gnu-toolchain-13.2.rel1-x…...

Kafka主题运维全指南:从基础配置到故障处理
#作者:张桐瑞 文章目录 主题日常管理1. 修改主题分区。2. 修改主题级别参数。3. 变更副本数。4. 修改主题限速。5.主题分区迁移。6. 常见主题错误处理常见错误1:主题删除失败。常见错误2:__consumer_offsets占用太多的磁盘。 主题日常管理 …...
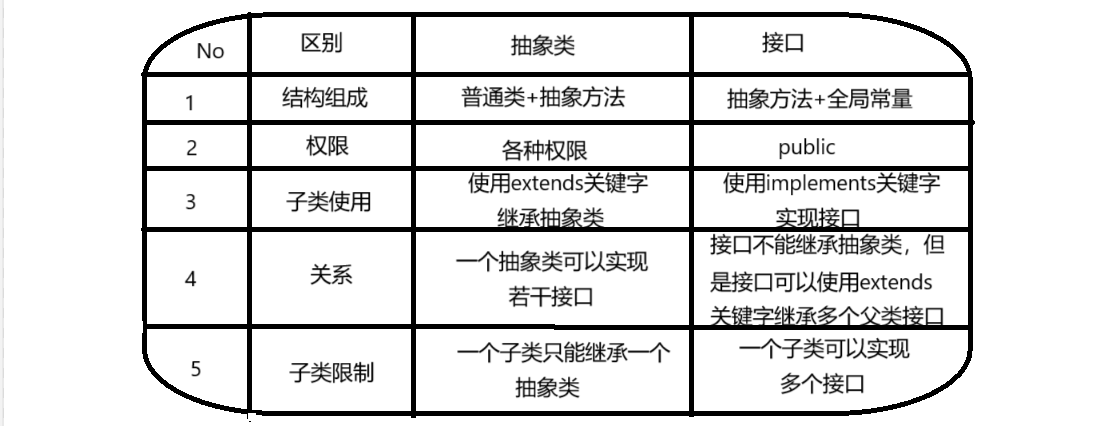
抽象类和接口(全)
一、抽象类 1.概念:如果⼀个类中没有包含⾜够的信息来描绘⼀个具体的对象,这样的类就是抽象类。 像是没有实际⼯作的⽅法,我们可以把它设计成⼀个抽象⽅法,包含抽象⽅法的类我们称为抽象类。 2.语法 在Java中,⼀个类如果被 abs…...
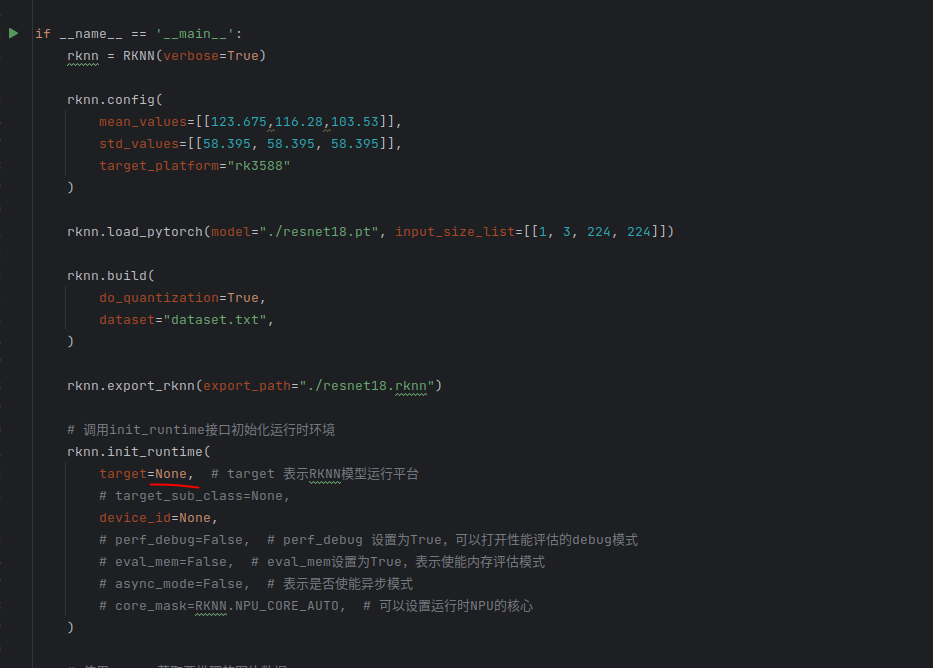
rknn toolkit2搭建和推理
安装Miniconda Miniconda - Anaconda Miniconda 选择一个 新的 版本 ,不用和RKNN的python版本保持一致 使用 ./xxx.sh进行安装 下面配置一下载源 # 清华大学源(最常用) conda config --add channels https://mirrors.tuna.tsinghua.edu.cn…...