51单片机锅炉监控系统仿真设计( proteus仿真+程序+原理图+报告+讲解视频)
51单片机锅炉监控系统仿真设计( proteus仿真+程序+原理图+报告+讲解视频)
- 1.主要功能:
- 讲解视频
- 2.仿真
- 3. 程序代码
- 4. 原理图
- 5. 设计报告
- 6. 设计资料内容清单&&下载链接
- 资料下载链接(可点击):
51单片机锅炉监控系统仿真设计( proteus仿真+程序+原理图+报告+讲解视频)
仿真图proteus7.8及以上
程序编译器:keil 4/keil 5
编程语言:C语言
设计编号:S0056
1.主要功能:
基于51单片机AT89C51/52(与AT89S51/52、AT89C51/52、STC89C51/52等51内核单片机通用)
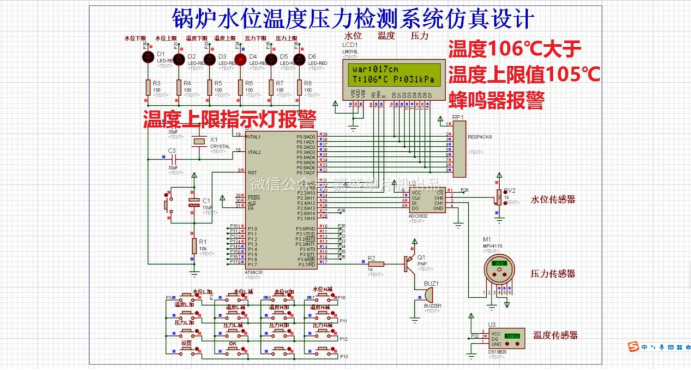
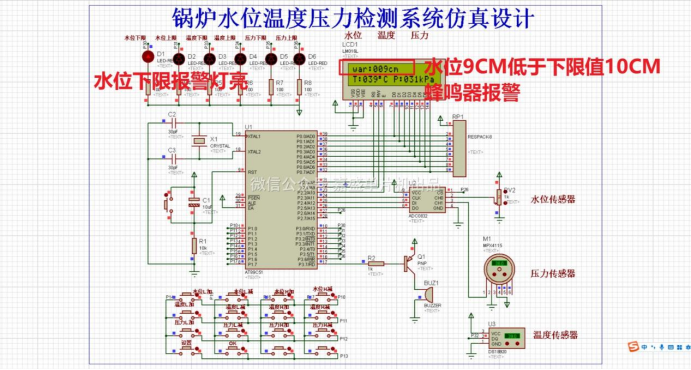
1.系统实时通过LCD1602显示水位检测值,锅炉炉膛温度值,锅炉内部压力值。
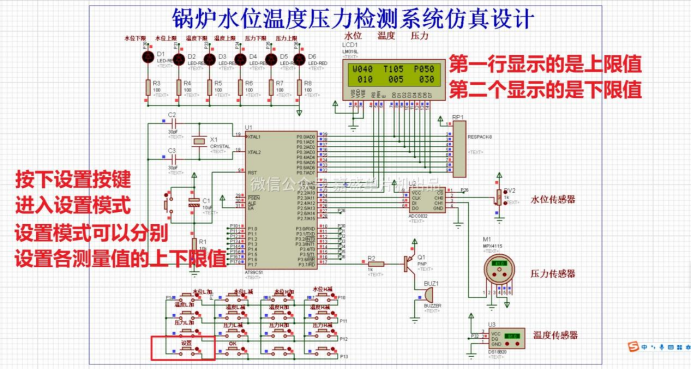
2、可对锅炉的水位上下限、炉膛温度上下限、压力上下限进行设置,第一行显示上限值,第二行显示下限值。
3、如果水位、温度、压力过限则蜂鸣器报警,通过LED指示报警类型。
4、默认水位下限值10cm,上限值40cm,压力下限值30kPa,压力上限值50kPa,温度下限值5℃,温度上限值105℃。
5、温度传感器使用DS18B20;水位传感器使用电位器模拟;压力传感器使用MPX4115。
需注意仿真中51单片机芯片是兼容的,AT89C51,AT89C52是51单片机的具体型号,内核是一样的。相同的原理图里,无论stc还是at都一样,引脚功能都是一样的,程序是兼容的,芯片可以替换为STC89C52/STC89C51/AT89C52/AT89C51等51单片机芯片。
以下为本设计资料展示图:
讲解视频
51单片机锅炉监测报警系统设计( proteus+程序+原理图+报告+讲解)
2.仿真
开始仿真
打开仿真工程,双击proteus中的单片机,选择hex文件路径,然后开始仿真。
开始仿真后,调整温度变大,当温度106℃大于温度上限值105℃后蜂鸣器报警,温度上限指示灯亮起报警。
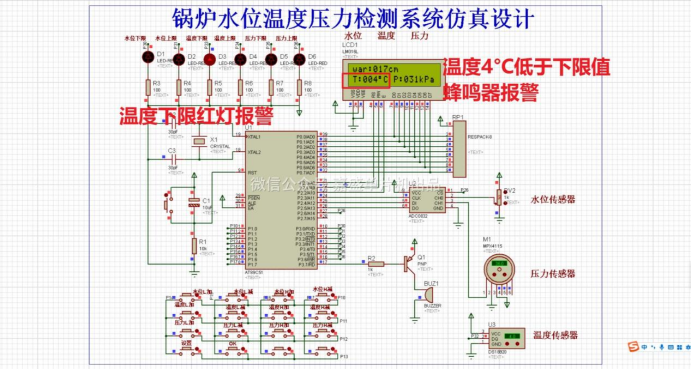
调整温度变小,当温度4℃小于温度下限值5℃后蜂鸣器报警,温度下限红灯报警亮起。
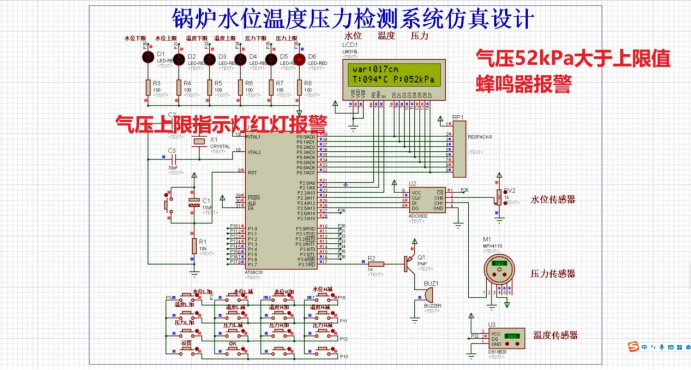
仿真中通过按键调整MPX4115压力传感器的值改变显示数值。调整压力变小,当压力调整到52kPa大于上限值,蜂鸣器报警,气压上限红灯报警亮起。
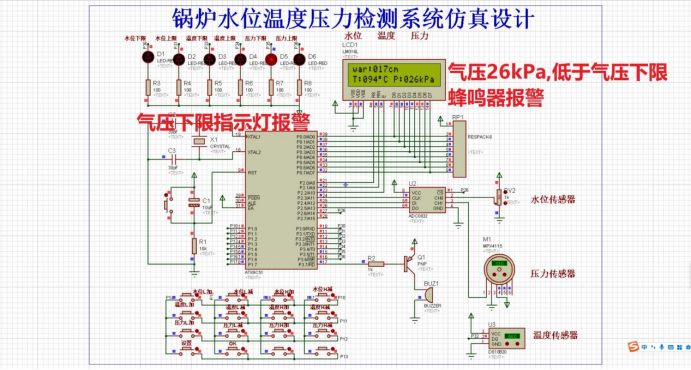
调整压力变小,当压力调整到26kPa低于下限值,蜂鸣器报警,气压下限红灯报警亮起。
仿真中通过按键调整RV2滑动变阻器模拟水位传感器的阻值随水位高低变化。上下箭头用于改变阻值的值。下箭头调低数值,上箭头调高数值。
调整水位变低,当水位调整到9CM低于下限值10CM,蜂鸣器报警,水位下限红灯报警亮起。
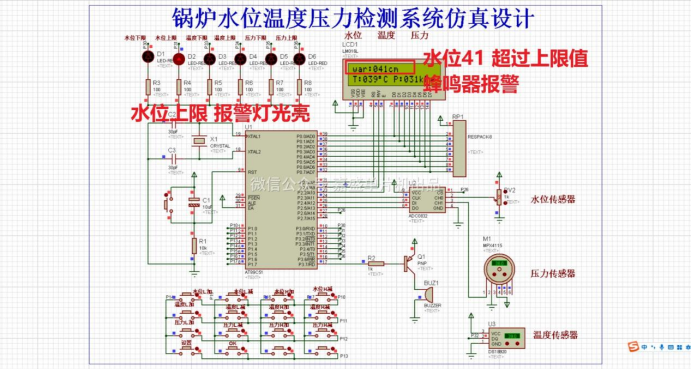
调整水位变高,当水位调整到41CM高于上限值40CM,蜂鸣器报警,水位上限红灯报警亮起。
开始仿真后,可以通过矩阵键盘的设置按键进入设置模式调整默认水位下限值、上限值、压力下限值、压力上限值、温度下限值和温度上限值。进入设置模式后LCD1602第一行显示上限值,第二行显示下限值。设置完成通过OK按键退出设置。
以上仿真结果均符合设计要求。
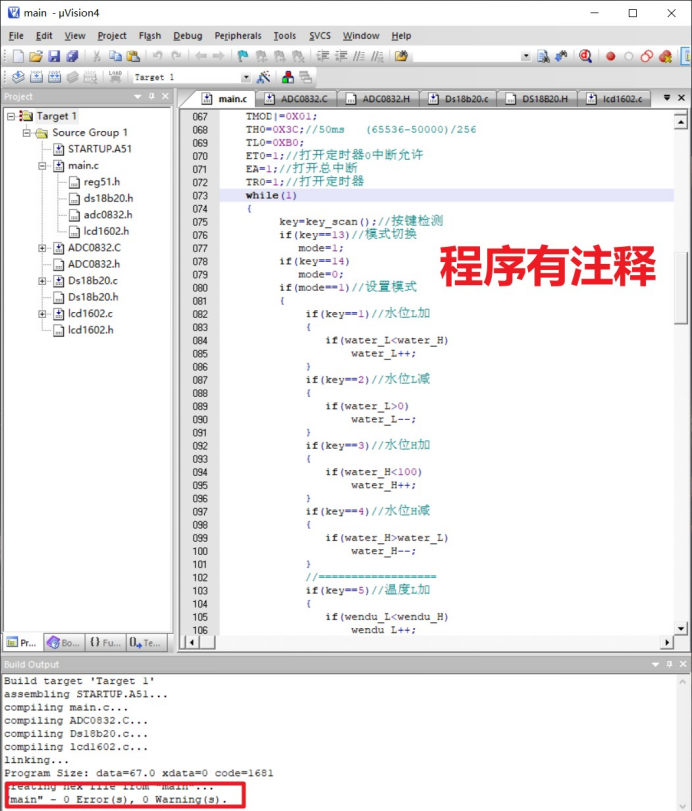
3. 程序代码
使用keil4或者keil5编译,代码有注释,可以结合报告理解代码含义。
mian函数:
#include "reg51.h"
#include"Ds18b20.h"
#include "ADC0832.h"
#include "lcd1602.h"
#define uchar unsigned char
#define uint unsigned int
sbit led1=P3^0;
sbit led2=P3^1;
sbit led3=P3^3;
sbit led4=P3^4;
sbit led5=P3^5;
sbit led6=P3^6;
//定义引脚
sbit beep=P3^7;//蜂鸣器
//公共变量
uchar time=0;
uchar mode=0;//测量模式、设置模式
//存储变量
uchar water=0;//水位
uchar press=0;//压力
int wendu=0;//温度
uchar water_L=10,water_H=40;//报警值
uchar press_L=30,press_H=50;
uchar wendu_L=5,wendu_H=105;
//显示变量
uchar hang1[]="war:000cm ";//水位
uchar hang2[]="T:000 C P:000kPa";
uchar hang3[]="0000 ";
//矩阵键盘 无按键按下,返回0 按键值1-16
uchar key_scan()//按键检测
{
uchar i,j;
i=0;
j=0;
P1=0x0f;
if(P1!=0x0f) //检测有无按下
{switch(P1)//检测行{case 0x0e:i=1;break;case 0x0d:i=5;break;case 0x0b:i=9;break;case 0x07:i=13;}P1=0xf0;switch(P1)//检测列{case 0xe0:j=0;break;case 0xd0:j=1;break;case 0xb0:j=2;break;case 0x70:j=3;}while(P1!=0xf0);//等待按键松开
}
return i+j;
}//主函数
void main()
{ uchar key=0;//按键值hang2[5]=0xdf;//圈Ds18b20Init();//传感器初始化init_1602();TMOD|=0X01;TH0=0X3C;//50ms (65536-50000)/256TL0=0XB0; ET0=1;//打开定时器0中断允许EA=1;//打开总中断TR0=1;//打开定时器while(1){key=key_scan();//按键检测if(key==13)//模式切换mode=1;if(key==14)mode=0;if(mode==1)//设置模式{if(key==1)//水位L加{if(water_L<water_H)water_L++;}if(key==2)//水位L减{if(water_L>0)water_L--;}if(key==3)//水位H加{if(water_H<100)water_H++;}if(key==4)//水位H减{if(water_H>water_L)water_H--;}//==================if(key==5)//温度L加{if(wendu_L<wendu_H)wendu_L++;}if(key==6)//温度L减{if(wendu_L>0)wendu_L--;}if(key==7)//温度H加{if(wendu_H<100)wendu_H++;}if(key==8)//温度H减{if(wendu_H>wendu_L)wendu_H--;}//==================if(key==9)//压力L加{if(press_L<press_H)press_L++;}if(key==10)//压力L减{if(press_L>0)press_L--;}if(key==11)//压力H加{if(press_H<100)press_H++;}if(key==12)//压力H减{if(press_H>press_L)press_H--;}}}
}
//定时器0中断
void Timer0() interrupt 1
{uchar i;if(time<10)//0.5s测量一次time++;else{time=0;water=ADC(1);//测量press=ADC(2);wendu=Ds18b20ReadTemp();//报警判断i=0;if(water>water_H)//水位超过上限值{i++;//i作为蜂鸣器报警标志位led2=0;//led低电平点亮}elseled2=1;//led高电平点熄灭if(water<water_L)//水位低于下限值{i++;//i作为蜂鸣器报警标志位led1=0;//led低电平点亮}elseled1=1;//led高电平点熄灭if(press>press_H)//压力{i++;led6=0;}elseled6=1;if(press<press_L){i++;led5=0;}elseled5=1;if(wendu>wendu_H)//温度{i++;led4=0;}elseled4=1;if(wendu<wendu_L){i++;led3=0;}elseled3=1;if(i>0)//蜂鸣器报警标志位大于1beep=0;//蜂鸣器响elsebeep=1;//蜂鸣器停//显示计算hang1[4]=water/100+0x30;//水位hang1[5]=water%100/10+0x30;hang1[6]=water%10+0x30;hang2[2]=wendu/100+0x30;//温度hang2[3]=wendu%100/10+0x30;hang2[4]=wendu%10+0x30;hang2[10]=press/100+0x30;//压力hang2[11]=press%100/10+0x30;hang2[12]=press%10+0x30;//显示清零// write_string(1,0," ");// write_string(2,0," ");//测量模式显示if(mode==0){write_string(1,0,hang1);write_string(2,0,hang2);}else//设置模式显示{ //显示水位hang3[0]='W';//上限hang3[1]=water_H/100+0x30;hang3[2]=water_H%100/10+0x30;hang3[3]=water_H%10+0x30;write_string(1,0,hang3);hang3[0]=' ';//下限hang3[1]=water_L/100+0x30;hang3[2]=water_L%100/10+0x30;hang3[3]=water_L%10+0x30;write_string(2,0,hang3);//显示温度hang3[0]='T';//上限hang3[1]=wendu_H/100+0x30;hang3[2]=wendu_H%100/10+0x30;hang3[3]=wendu_H%10+0x30;write_string(1,6,hang3);hang3[0]=' ';//下限hang3[1]=wendu_L/100+0x30;hang3[2]=wendu_L%100/10+0x30;hang3[3]=wendu_L%10+0x30;write_string(2,6,hang3);//显示压力hang3[0]='P';//上限hang3[1]=press_H/100+0x30;hang3[2]=press_H%100/10+0x30;hang3[3]=press_H%10+0x30;write_string(1,12,hang3);hang3[0]=' ';//下限hang3[1]=press_L/100+0x30;hang3[2]=press_L%100/10+0x30;hang3[3]=press_L%10+0x30;write_string(2,12,hang3);}}TH0=0X3C;//50msTL0=0XB0;
}
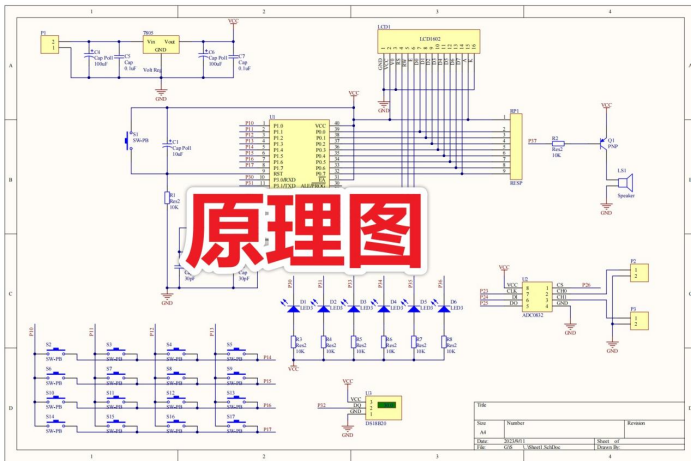
4. 原理图
原理图使用AD绘制,可供实物参考。
Proteus仿真和实物作品的区别:
1.运行环境:Proteus仿真是在计算机上运行的,而实物则是在硬件电路板上运行。
2.调试方式:在Proteus仿真中,可以方便地进行单步调试和观察变量值的变化,而在实物中则需要通过调试器或者串口输出等方式进行调试。
电路连接方式:在Proteus仿真中,可以通过软件设置进行电路连接的修改,而在实物中则需要通过硬件电路板和连接线进行修改。
3.运行速度:Proteus仿真通常比实物运行速度快,因为仿真是基于计算机运行的,而实物则需要考虑电路板上的物理限制和器件的响应时间等因素。
4.功能实现:在Proteus仿真中,可以通过软件设置实现不同的功能,而在实物中则需要根据电路设计和器件的性能进行实现。
5. 设计报告
7506字设计报告,内容包括摘要,硬件设计、软件设计、软硬件框图、调试、结论等
6. 设计资料内容清单&&下载链接
资料下载链接(可点击):
资料设计资料包括仿真,程序代码、讲解视频、功能要求、设计报告、软硬件设计框图等。
0、常见使用问题及解决方法–必读!!!!
1、仿真图
2、程序源码
3、开题报告
3、原理图
5、功能要求
6、元器件清单
7、设计报告
8、软硬件流程框图
9、讲解视频
Altium Designer 软件资料
KEIL软件资料
Proteus软件资料
单片机学习资料
答辩技巧
设计报告常用描述
鼠标双击打开查找更多51 STM32单片机课程毕业设计.url
相关文章:
51单片机锅炉监控系统仿真设计( proteus仿真+程序+原理图+报告+讲解视频)
51单片机锅炉监控系统仿真设计( proteus仿真程序原理图报告讲解视频) 1.主要功能:讲解视频2.仿真3. 程序代码4. 原理图5. 设计报告6. 设计资料内容清单&&下载链接资料下载链接(可点击): 51单片机锅炉监控系统仿…...
zip文件解压缩命令全
zip文件解压缩命令全 入门Zip 用法选项示例语法形式和选项基本语法压缩目录将文件添加到现有压缩文件解压缩文件将 zip 文件解压缩到指定目录列出 zip 文件中的内容将 zip 文件加密将 zip 文件解密将 zip 文件中的文件转成 UTF-8 编码Zip 压缩示例创建新的 zip 压缩文件将文件添…...

章鱼网络进展月报 | 2023.10.1-10.31
章鱼网络大事摘要 1、Louis 成功竞选 NDC 的 HoM 议席,将会尽最大努力推动 NEAR 变革。2、章鱼网络受邀参加在土耳其主办的 Cosmoverse2023,分享 Adaptive IBC 的技术架构。3、2023年10月8日章鱼日,是章鱼网络主网上线2周年的纪念日。 …...
数据结构 | 单链表专题【详解】
数据结构 | 单链表专题【详解】 文章目录 数据结构 | 单链表专题【详解】链表的概念及结构单链表的实现头文件打印尾插头插尾删头删查找在指定位置之前插入数据在指定位置之后插入数据删除pos节点删除pos之后的节点销毁链表 顺序表遗留下来的问题 中间/头部的插⼊删除ÿ…...
前端基础之BOM和DOM
目录 一、前戏 window对象 window的子对象 navigator对象(了解即可) screen对象(了解即可) history对象(了解即可) location对象 弹出框 计时相关 二、DOM HTML DOM 树 查找标签 直接查找 间…...

第23期 | GPTSecurity周报
GPTSecurity是一个涵盖了前沿学术研究和实践经验分享的社区,集成了生成预训练 Transformer(GPT)、人工智能生成内容(AIGC)以及大型语言模型(LLM)等安全领域应用的知识。在这里,您可以…...
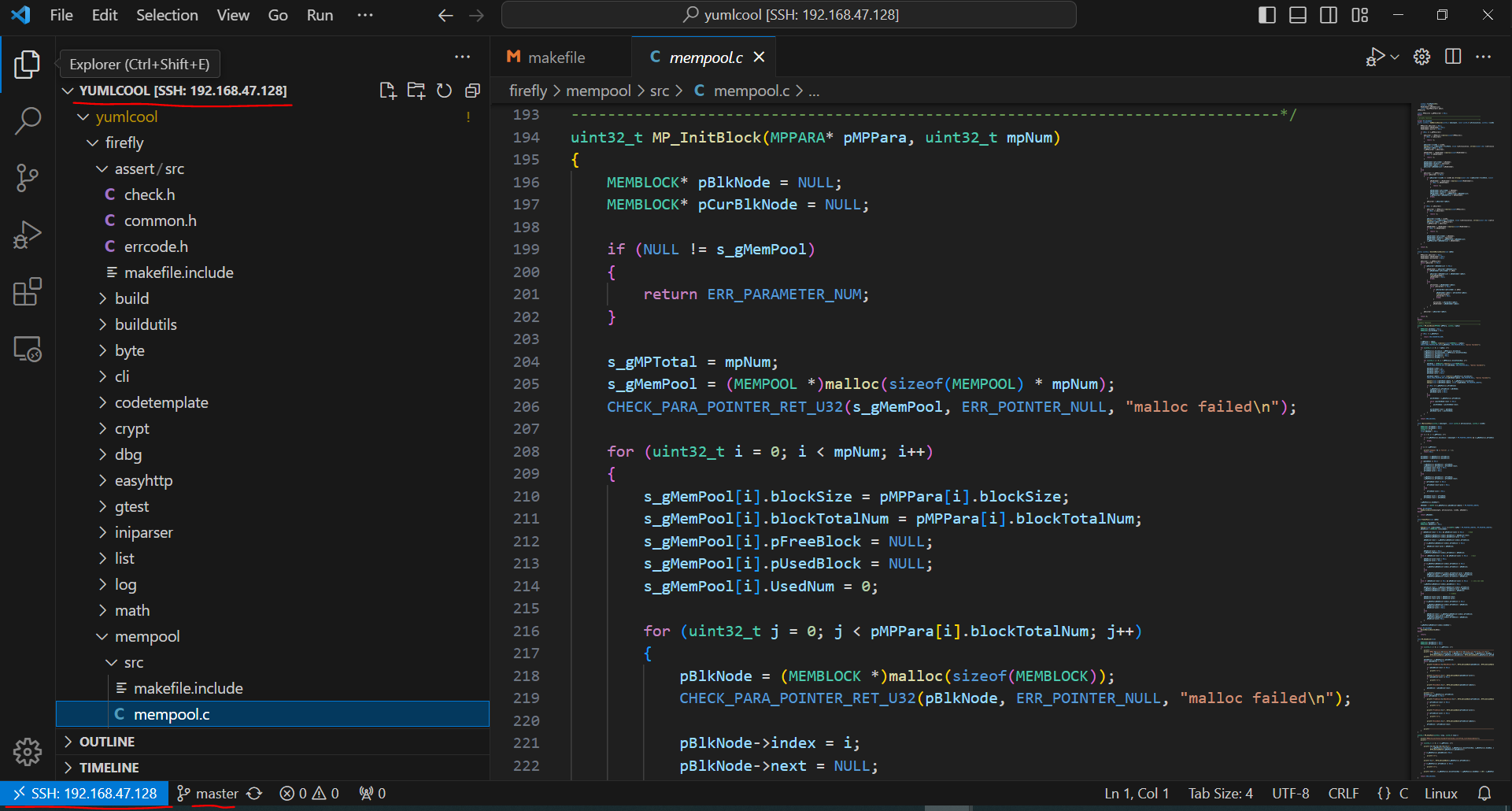
VSCode实用远程主机功能
作为嵌入式开发者,经常在各种系统平台或者开发工具之间切换,比如你的代码在Linux虚拟机上,如果不习惯在Linux下用IDE,那么我尝试将Linux的目录通过samba共享出来,在windows下用网络映射盘的方式映射出来,VS…...
并发编程: 2. 线程管控
给定一个线程,只要令std::thread对象与之关联,就能管控该线程的几乎每个细节。 2.1 线程的基本管控 2.1.1 发起线程 线程通过构建std::thread对象而启动,该对象指明线程要运行的任务(函数)。简单的任务,…...

使用 Python、XML 和 YAML 编写 ROS 2 Launch 文件
系列文章目录 ROS2 重要概念 ament_cmake_python 用户文档 ROS2 ament_cmake 用户文档 使用 rosdep 管理 ROS 2 依赖项 文章目录 系列文章目录前言一、Launch 文件示例1.1 Python 版本1.2 XML 版本1.3 YAML 版本 二、从命令行使用 Launch 文件1. Launching2. 设置参数3. 控制海…...

SpringCloud 微服务全栈体系(十)
第十章 RabbitMQ 一、初识 MQ 1. 同步和异步通讯 微服务间通讯有同步和异步两种方式: 同步通讯:就像打电话,需要实时响应。 异步通讯:就像发邮件,不需要马上回复。 两种方式各有优劣,打电话可以立即得…...
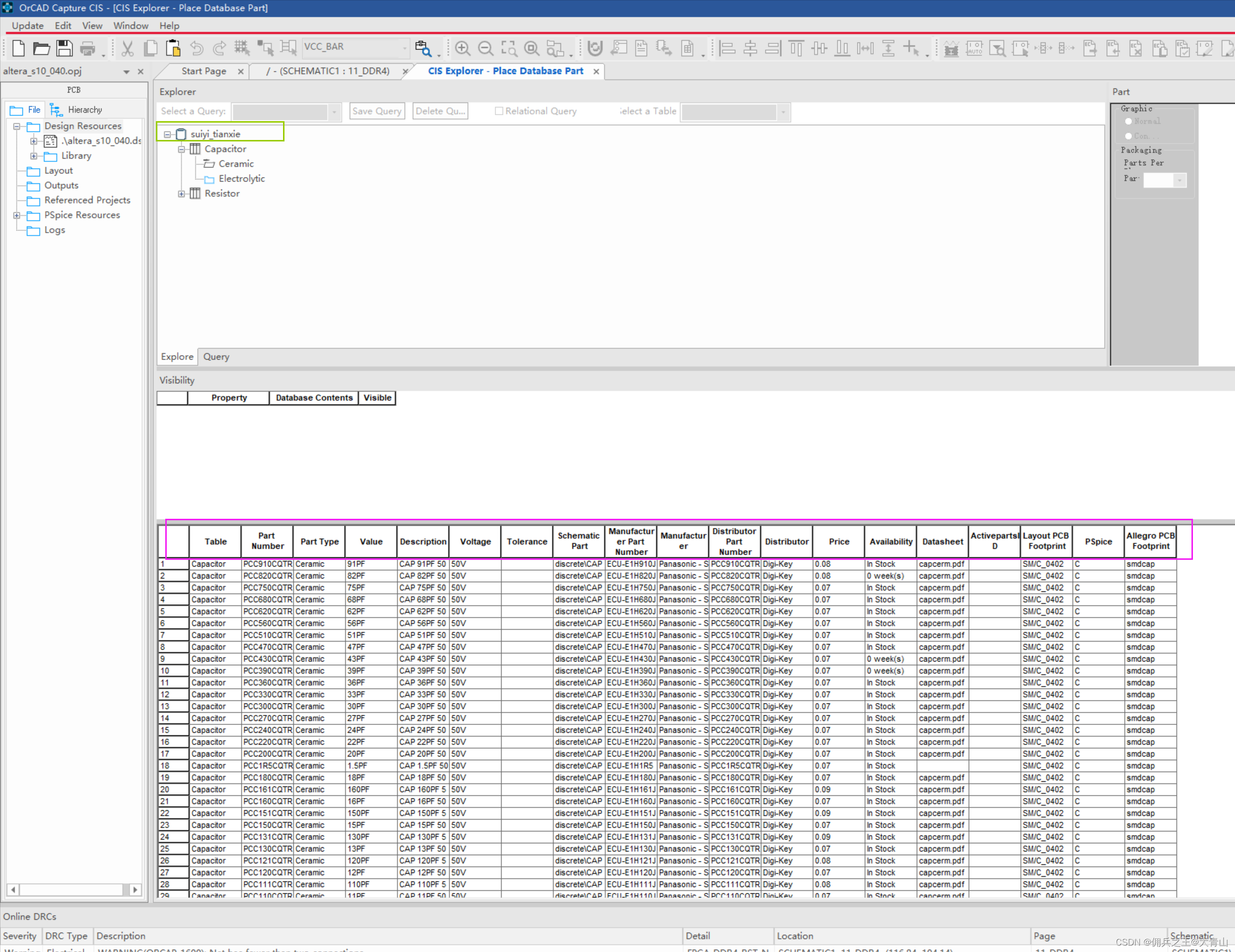
[原创]Cadence17.4,win64系统,构建CIS库
目录 1、背景介绍 2、具体操作流程 3、遇到问题、分析鉴别问题、解决问题 4、借鉴链接并评论 1、背景介绍 CIS库,绘制原理图很方便,但是需要在Cadence软件与数据库之间建立联系,但是一直不成功,花费半天时间才搞明白如何建立关系并…...
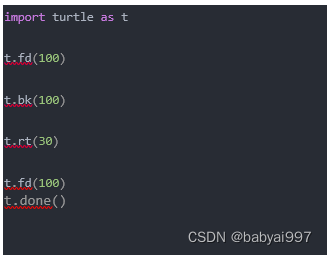
Python 海龟绘图基础教学教案(一)
Python 海龟绘图——第 1 题 题目:绘制下面的图形 解析: 考察 turtle 基本命令,绘制直线,使用 forward,可缩写为 fd。 答案: import turtle as t t.fd(100) # 或者使用 t.forward(100) t.done() Python 海…...
JUC并发编程系列(一):Java线程
前言 JUC并发编程是Java程序猿必备的知识技能,只有深入理解并发过程中的一些原则、概念以及相应源码原理才能更好的理解软件开发的流程。在这篇文章中荔枝会梳理并发编程的基础,整理有关Java线程以及线程死锁的知识,希望能够帮助到有需要的小…...

双向链表相关代码
DLinkList.h // // DLinkList.hpp // FirstP // // Created by 赫赫 on 2023/10/31. // 双向链表相关代码:双向链表、循环双向链表#ifndef DLinkList_hpp #define DLinkList_hpp #include <stdio.h> #include <stdlib.h> #include <iostream>…...

[每周一更]-(第70期):常用的GIT操作命令
1、增删文件 # 添加当前目录的所有文件到暂存区 $ git add .# 添加指定文件到暂存区 $ git add <file1> <file2> ...# 添加指定目录到暂存区,包括其子目录 $ git add <dir># 删除工作区文件,并且将这次删除放入暂存区 $ git rm [file…...
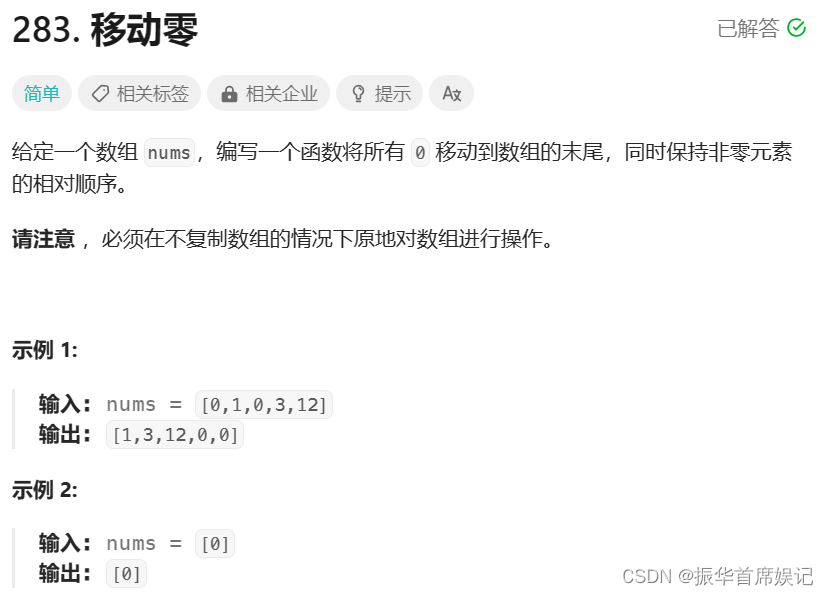
Leetcode-283 移动零
count记录0的个数,不为0的数取代0位置,最后把剩余位置置零 class Solution {public void moveZeroes(int[] nums) {int count 0;for(int i0;i<nums.length;i){if(nums[i]0){count;}else{nums[i-count]nums[i];}}for(int inums.length-count;i<nu…...

爱上C语言:函数递归,青蛙跳台阶图文详解
🚀 作者:阿辉不一般 🚀 你说呢:生活本来沉闷,但跑起来就有风 🚀 专栏:爱上C语言 🚀作图工具:draw.io(免费开源的作图网站) 如果觉得文章对你有帮助的话,还请…...

Pycharm 对容器中的 Python 程序断点远程调试
pycharm如何连接远程服务器的docker容器有两种方法: 第一种:pycharm通过ssh连接已在运行中的docker容器 第二种:pycharm连接docker镜像,pycharm运行代码再自动创建容器 本文是第一种方法的教程,第二种请点击以上的链接…...

自动驾驶行业观察之2023上海车展-----车企发展趋势(3)
合资\外资发展 宝马:i7、iX1新车亮相,未来将持续发力电动化、数字化(座舱) 宝马在本次车展重点展示了电动化产品,新发车型为i7 M70L、iX1、及i vision Dee概念车等车型。 • 展示重点:电动化数字化&#…...

day55【动态规划子序列】392.判断子序列 115.不同的子序列
文章目录 392.判断子序列115.不同的子序列 392.判断子序列 题目链接:力扣链接 讲解链接:代码随想录讲解链接 题意:给定字符串 s 和 t ,判断 s 是否为 t 的子序列。 字符串的一个子序列是原始字符串删除一些(也可以不…...

R语言AI模型部署方案:精准离线运行详解
R语言AI模型部署方案:精准离线运行详解 一、项目概述 本文将构建一个完整的R语言AI部署解决方案,实现鸢尾花分类模型的训练、保存、离线部署和预测功能。核心特点: 100%离线运行能力自包含环境依赖生产级错误处理跨平台兼容性模型版本管理# 文件结构说明 Iris_AI_Deployme…...

中南大学无人机智能体的全面评估!BEDI:用于评估无人机上具身智能体的综合性基准测试
作者:Mingning Guo, Mengwei Wu, Jiarun He, Shaoxian Li, Haifeng Li, Chao Tao单位:中南大学地球科学与信息物理学院论文标题:BEDI: A Comprehensive Benchmark for Evaluating Embodied Agents on UAVs论文链接:https://arxiv.…...
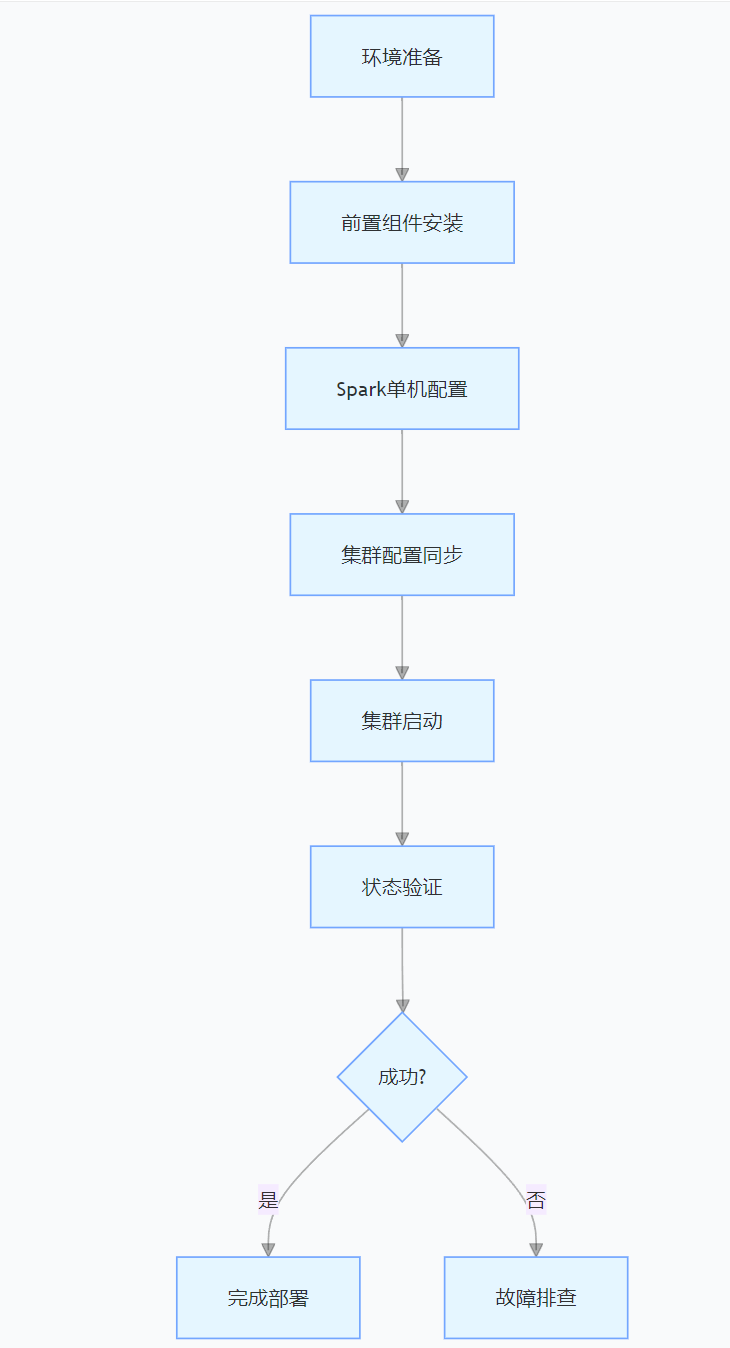
CentOS下的分布式内存计算Spark环境部署
一、Spark 核心架构与应用场景 1.1 分布式计算引擎的核心优势 Spark 是基于内存的分布式计算框架,相比 MapReduce 具有以下核心优势: 内存计算:数据可常驻内存,迭代计算性能提升 10-100 倍(文档段落:3-79…...
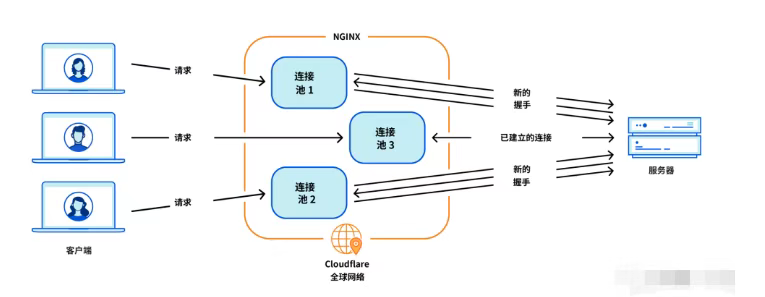
Cloudflare 从 Nginx 到 Pingora:性能、效率与安全的全面升级
在互联网的快速发展中,高性能、高效率和高安全性的网络服务成为了各大互联网基础设施提供商的核心追求。Cloudflare 作为全球领先的互联网安全和基础设施公司,近期做出了一个重大技术决策:弃用长期使用的 Nginx,转而采用其内部开发…...
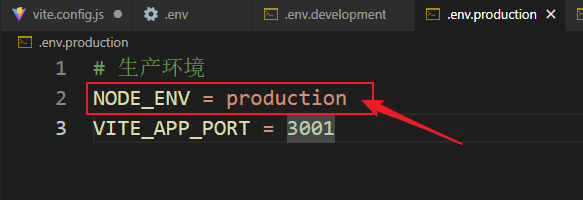
vue3+vite项目中使用.env文件环境变量方法
vue3vite项目中使用.env文件环境变量方法 .env文件作用命名规则常用的配置项示例使用方法注意事项在vite.config.js文件中读取环境变量方法 .env文件作用 .env 文件用于定义环境变量,这些变量可以在项目中通过 import.meta.env 进行访问。Vite 会自动加载这些环境变…...

Spring Cloud Gateway 中自定义验证码接口返回 404 的排查与解决
Spring Cloud Gateway 中自定义验证码接口返回 404 的排查与解决 问题背景 在一个基于 Spring Cloud Gateway WebFlux 构建的微服务项目中,新增了一个本地验证码接口 /code,使用函数式路由(RouterFunction)和 Hutool 的 Circle…...

AI,如何重构理解、匹配与决策?
AI 时代,我们如何理解消费? 作者|王彬 封面|Unplash 人们通过信息理解世界。 曾几何时,PC 与移动互联网重塑了人们的购物路径:信息变得唾手可得,商品决策变得高度依赖内容。 但 AI 时代的来…...
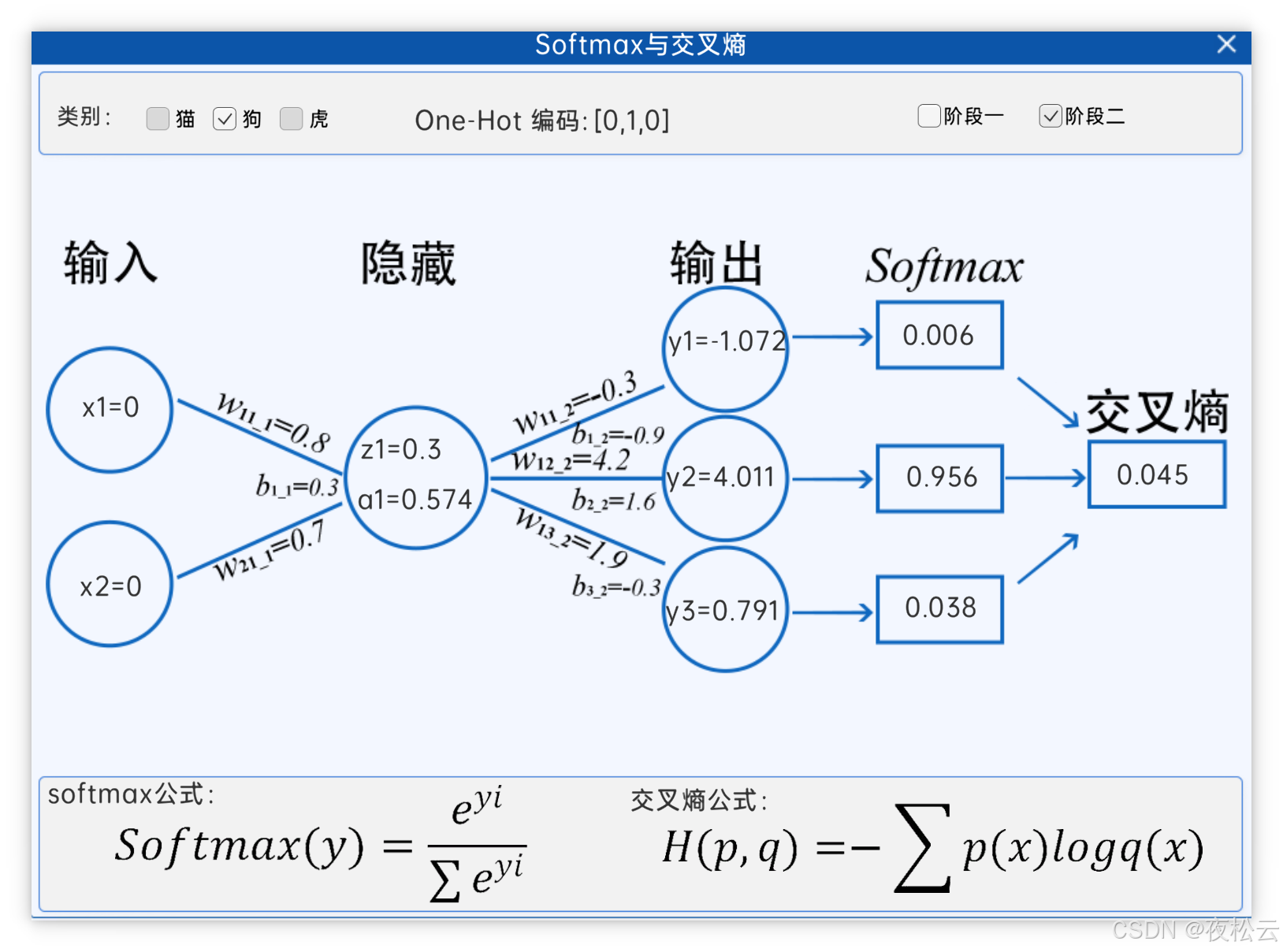
深入浅出深度学习基础:从感知机到全连接神经网络的核心原理与应用
文章目录 前言一、感知机 (Perceptron)1.1 基础介绍1.1.1 感知机是什么?1.1.2 感知机的工作原理 1.2 感知机的简单应用:基本逻辑门1.2.1 逻辑与 (Logic AND)1.2.2 逻辑或 (Logic OR)1.2.3 逻辑与非 (Logic NAND) 1.3 感知机的实现1.3.1 简单实现 (基于阈…...

NPOI操作EXCEL文件 ——CAD C# 二次开发
缺点:dll.版本容易加载错误。CAD加载插件时,没有加载所有类库。插件运行过程中用到某个类库,会从CAD的安装目录找,找不到就报错了。 【方案2】让CAD在加载过程中把类库加载到内存 【方案3】是发现缺少了哪个库,就用插件程序加载进…...
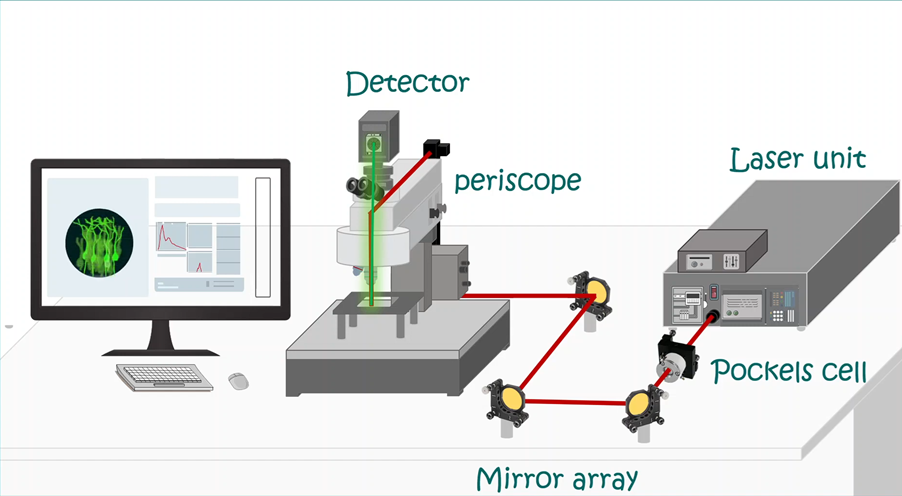
LabVIEW双光子成像系统技术
双光子成像技术的核心特性 双光子成像通过双低能量光子协同激发机制,展现出显著的技术优势: 深层组织穿透能力:适用于活体组织深度成像 高分辨率观测性能:满足微观结构的精细研究需求 低光毒性特点:减少对样本的损伤…...