ROS1学习笔记:ROS中的坐标管理系统(ubuntu20.04)
参考B站古月居ROS入门21讲:ROS中的坐标系管理系统
基于VMware Ubuntu 20.04 Noetic版本的环境
文章目录
- 一、机器人中的坐标变换
- 二、TF功能包
- 三、小海龟跟随实验
- 3.1 启动实验
- 3.2 查看当前的TF树
- 3.3 坐标相对位置可视化
- 3.3.1 tf_echo
- 3.3.2 rviz
一、机器人中的坐标变换
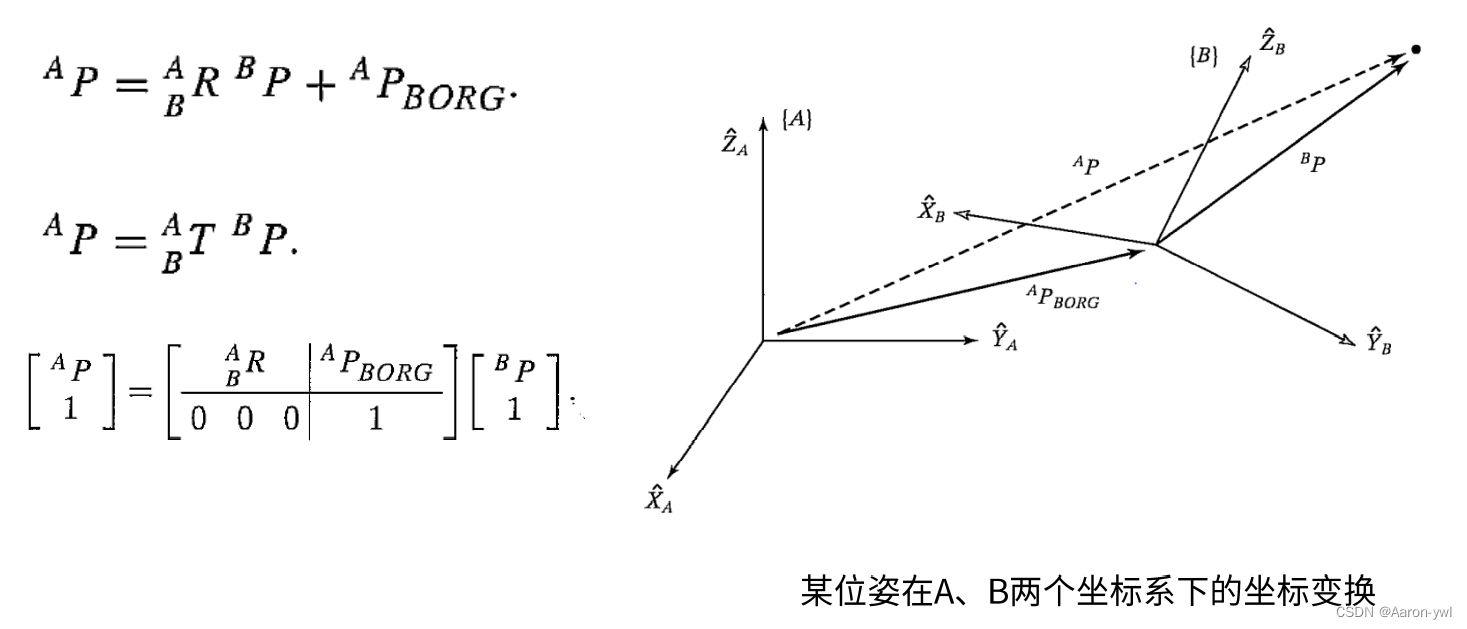
机器人运动学的核心,描述任意两个坐标系之中任意两个向量之间的变换,可以用一个4×4的变换矩阵(Transformation Matrices)来描述它的平移和旋转变化。
变换矩阵中有包括旋转矩阵(Rotation Matrix)的信息和位置移动(Translation)的信息。
二、TF功能包
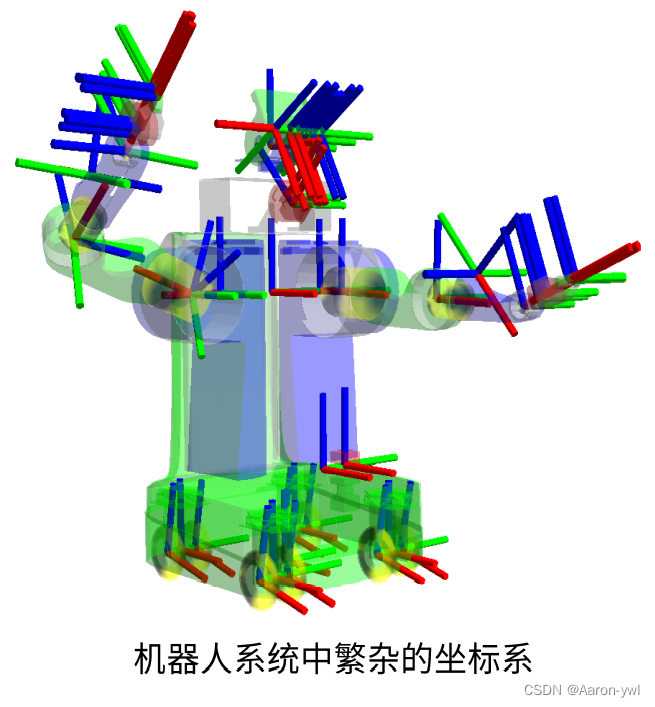
一个机器人系统中,通常会涉及到很多坐标系的运算,这免不了大量的矩阵运算。我们可以使用ROS中的TF(Transform)功能包来解决问题。
TF功能包的特点:默认能记录10秒内机器人所以坐标系的位置关系。
TF坐标变化如何实现?
- 广播TF变换
- 监听TF变换
在ROS Master启动后,启动TF后,会在后台维护一个名为“TF树(TF Tree)”的数据结构。所有的坐标系都是通过树形结构保存在这个树结构当中,当有结点想查询某两个坐标系之间的关系的话,直接可以查询这个TF Tree来得到。
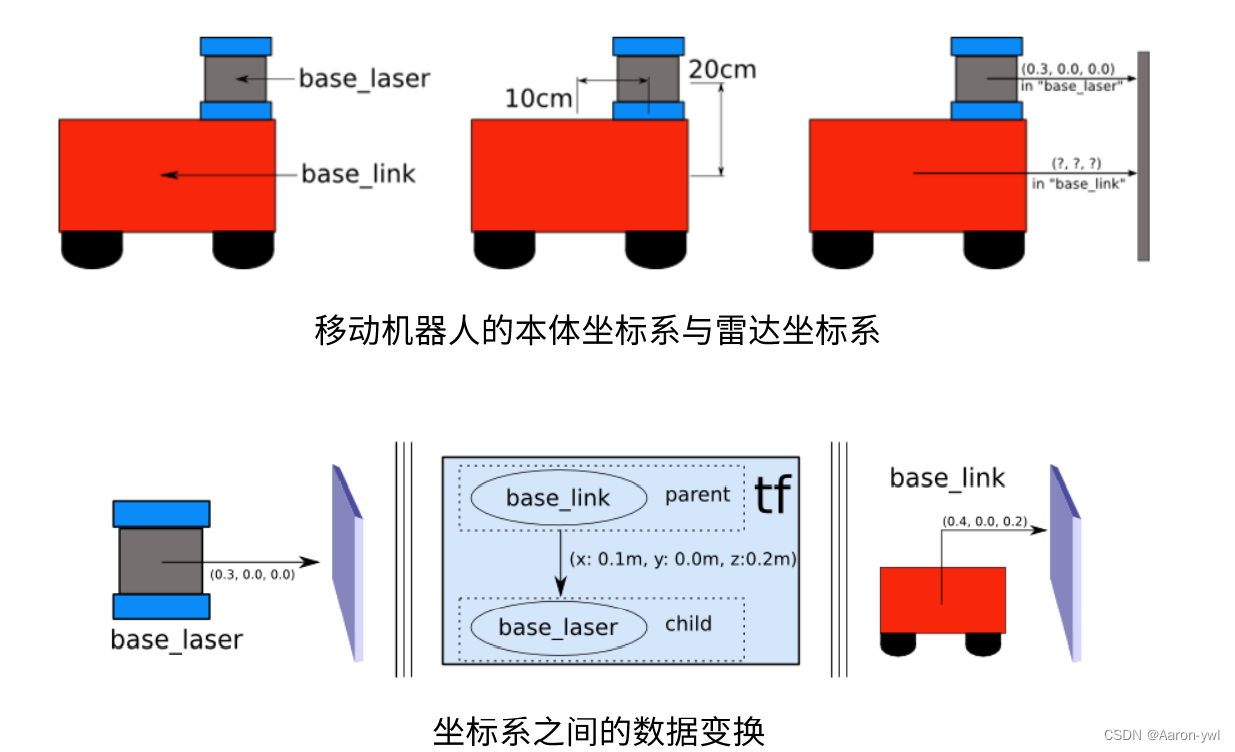
比如这个TF的例子:
这辆带激光雷达的车,车体是以base_link为坐标系的,激光雷达是以base_laser为坐标系的,可以看到base_laser是base_link向x轴平移了0.1m,向z轴平移了0.2m,y轴没有平移。 当base_laser测到离墙面的距离为0.3m,即向量(0.3,0,0)时,就可以根据图下方的TF
tree进行坐标系之间的数据变换的运算,从而算出base_link的相对与测距点的相对向量(0.4,0,0.2)。
三、小海龟跟随实验
我们通过一个小程序来实现小海龟跟随另一个小海龟的实验,并通过可视化的方法来理解坐标系的变换。
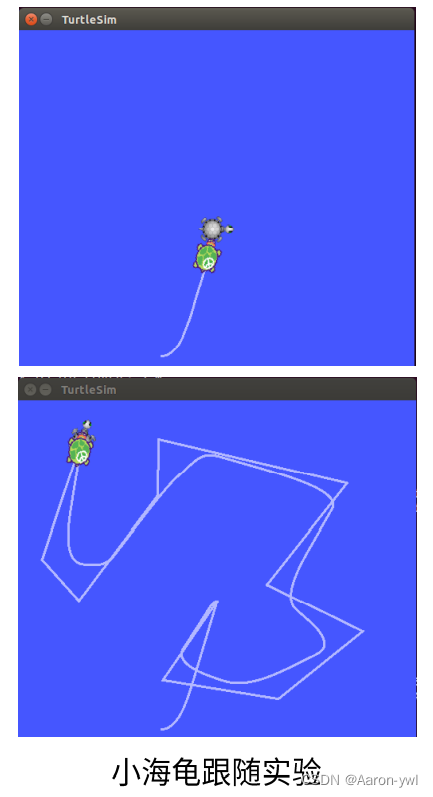
在这个实验中,我们先生成一只小乌龟,然后再生成一只新的小乌龟,新的小乌龟会自动跟随旧的小乌龟,直到重合。
3.1 启动实验
在进行实验之前,由于noetic的版本是预制了这个程序的,但是直接运行会报错,原因是python解释器的指向问题,我们先打开终端输入以下命令:
cd /usr/bin/
sudo rm -r python #出现rm -r 找不到文件的忽略即可
sudo cp python3 python
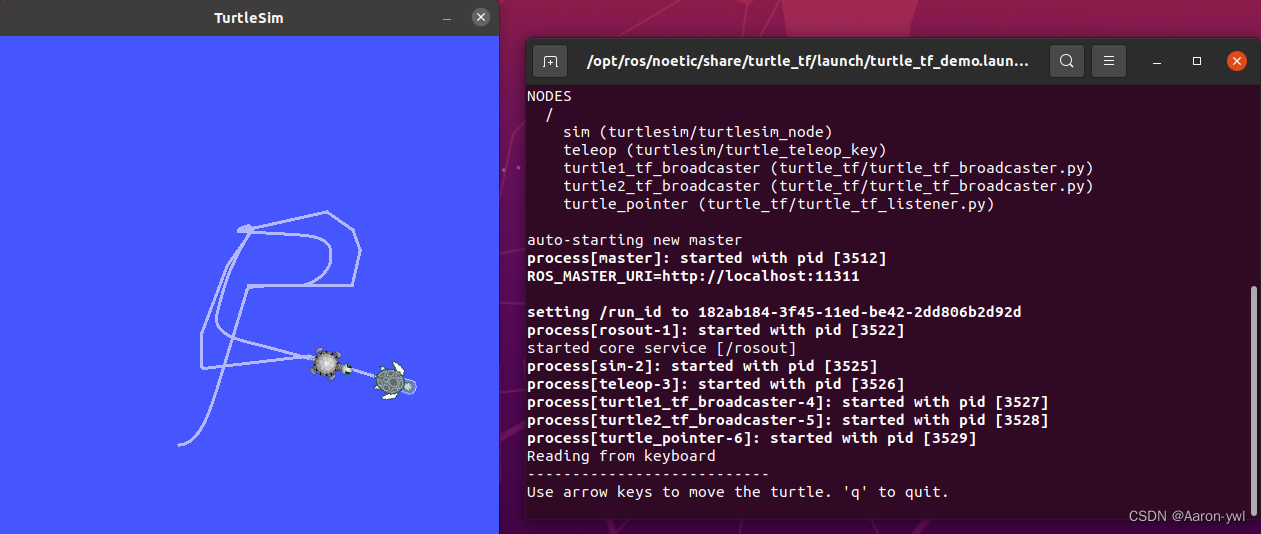
执行完后我们就可以运行这个程序了:
roslaunch turtle_tf turtle_tf_demo.launch
打开后我们就会生成两只小乌龟,我们通过键盘控制其中一只小乌龟,另一只就会自动跟随。
3.2 查看当前的TF树
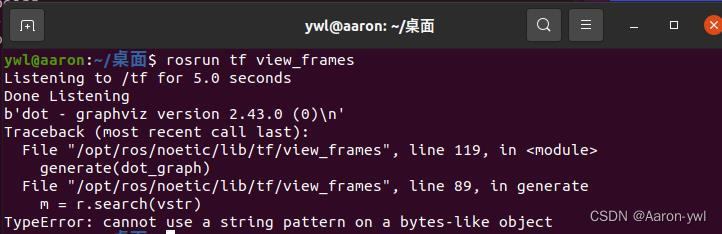
我们可以查看当前的TF数,查看坐标系之间的关系:
rosrun tf view_frames
但是直接运行会报错,无法生成pdf文件
我们打开如图所示的报错文件夹,加上如图所示的这句话:
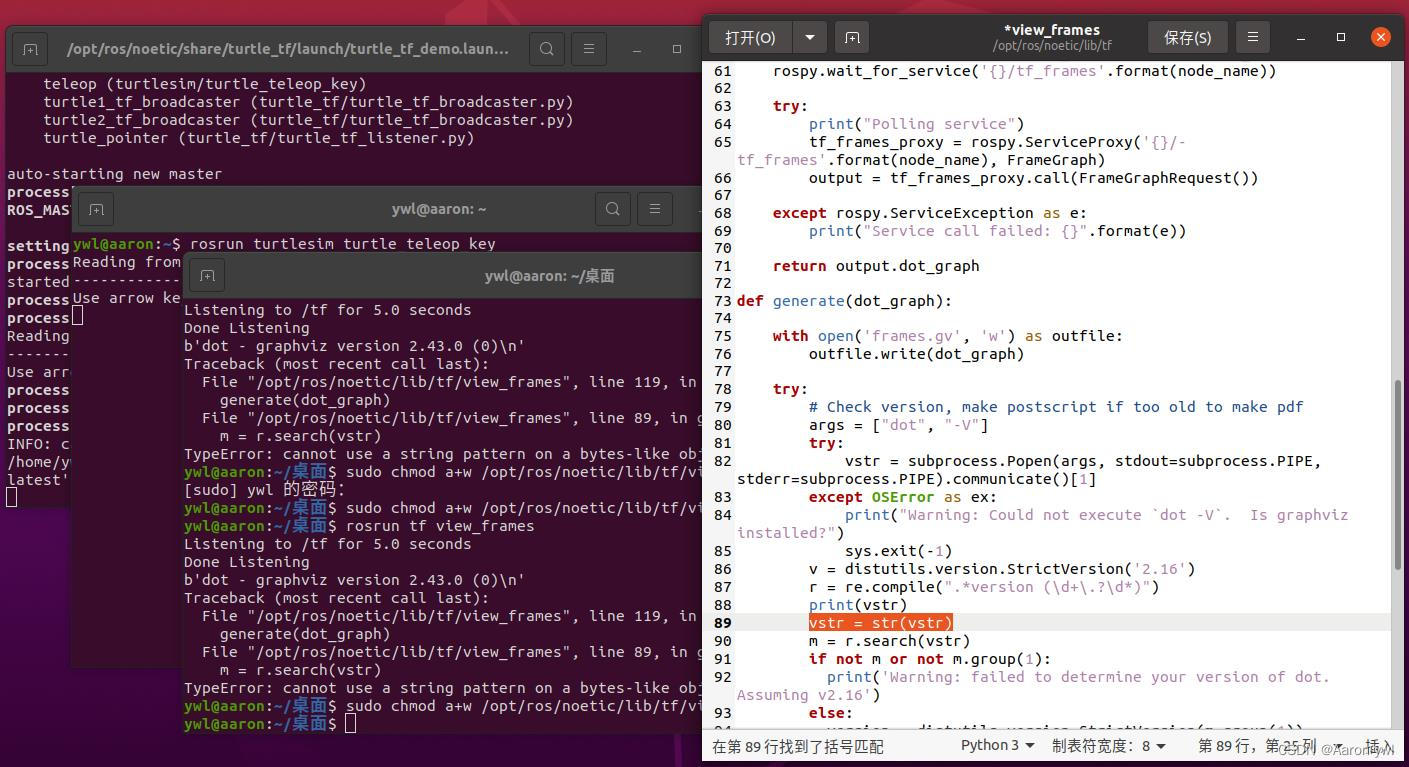
再运行:
rosrun tf view_frames
成功生成了pdf文件:
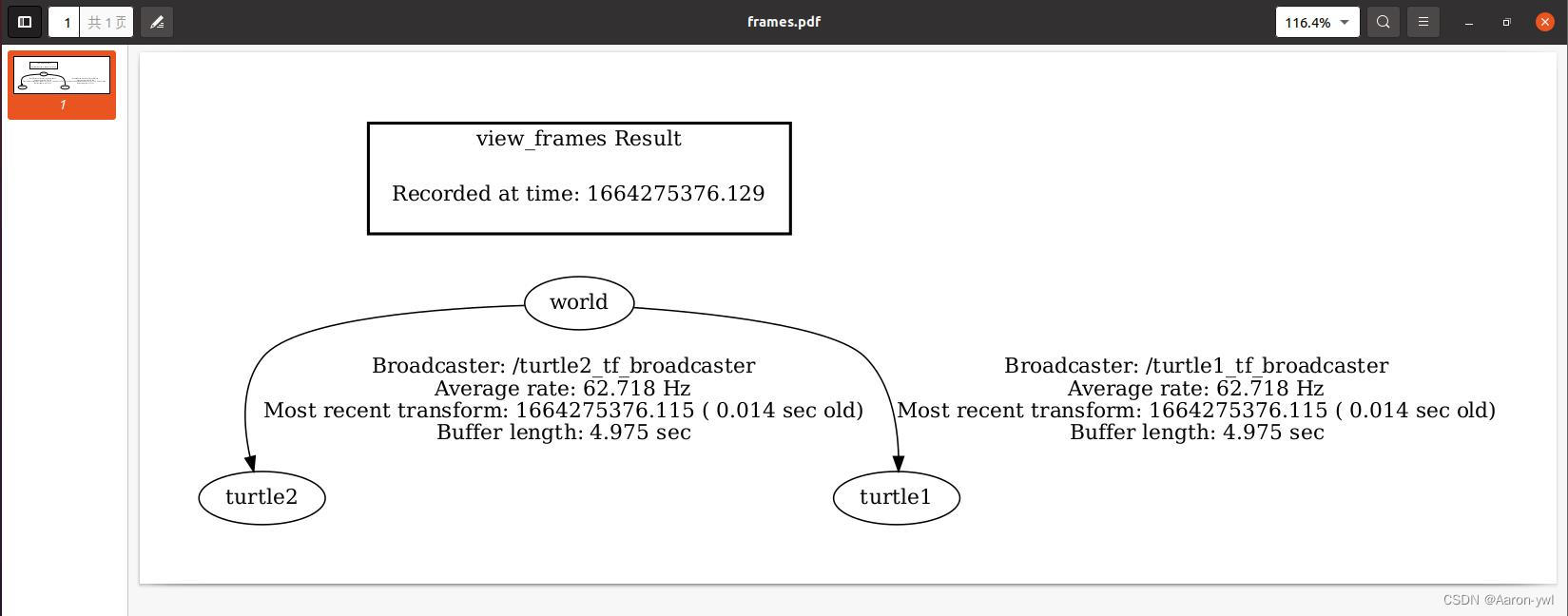
我们可以看到这棵树展示了当前坐标系之间的位置关系,turtle1和turtle2是相对于world坐标系变化的。
3.3 坐标相对位置可视化
3.3.1 tf_echo
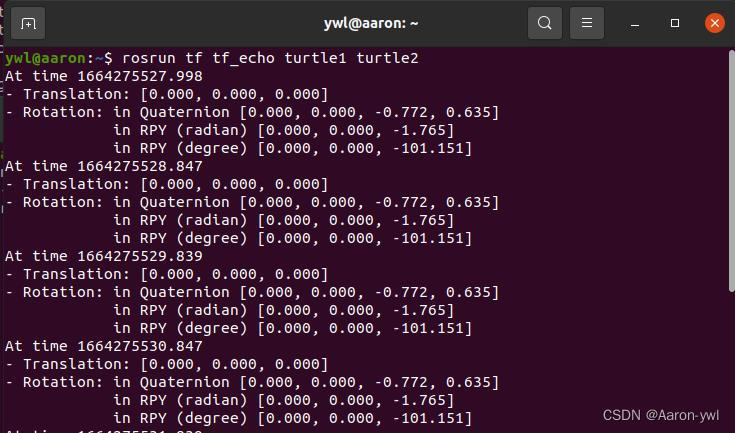
我们如果想看两只小海龟的相对变换关系,可输入:
rosrun tf tf_echo turtle1 turtle2
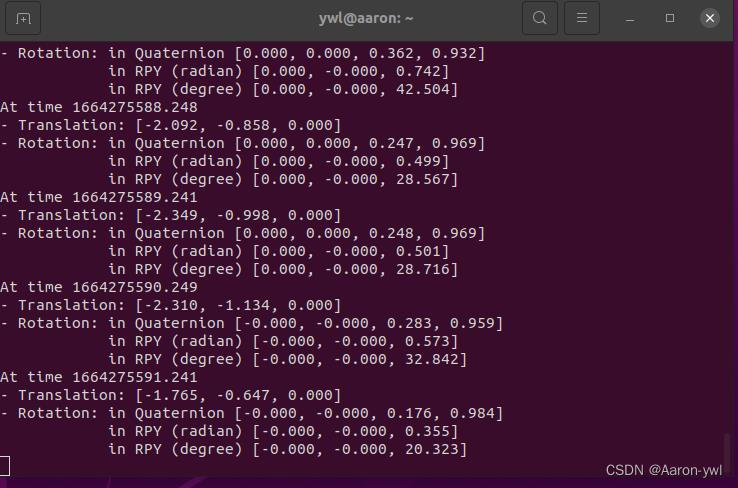
我们如果操控小海龟移动,则位置会发生变化:
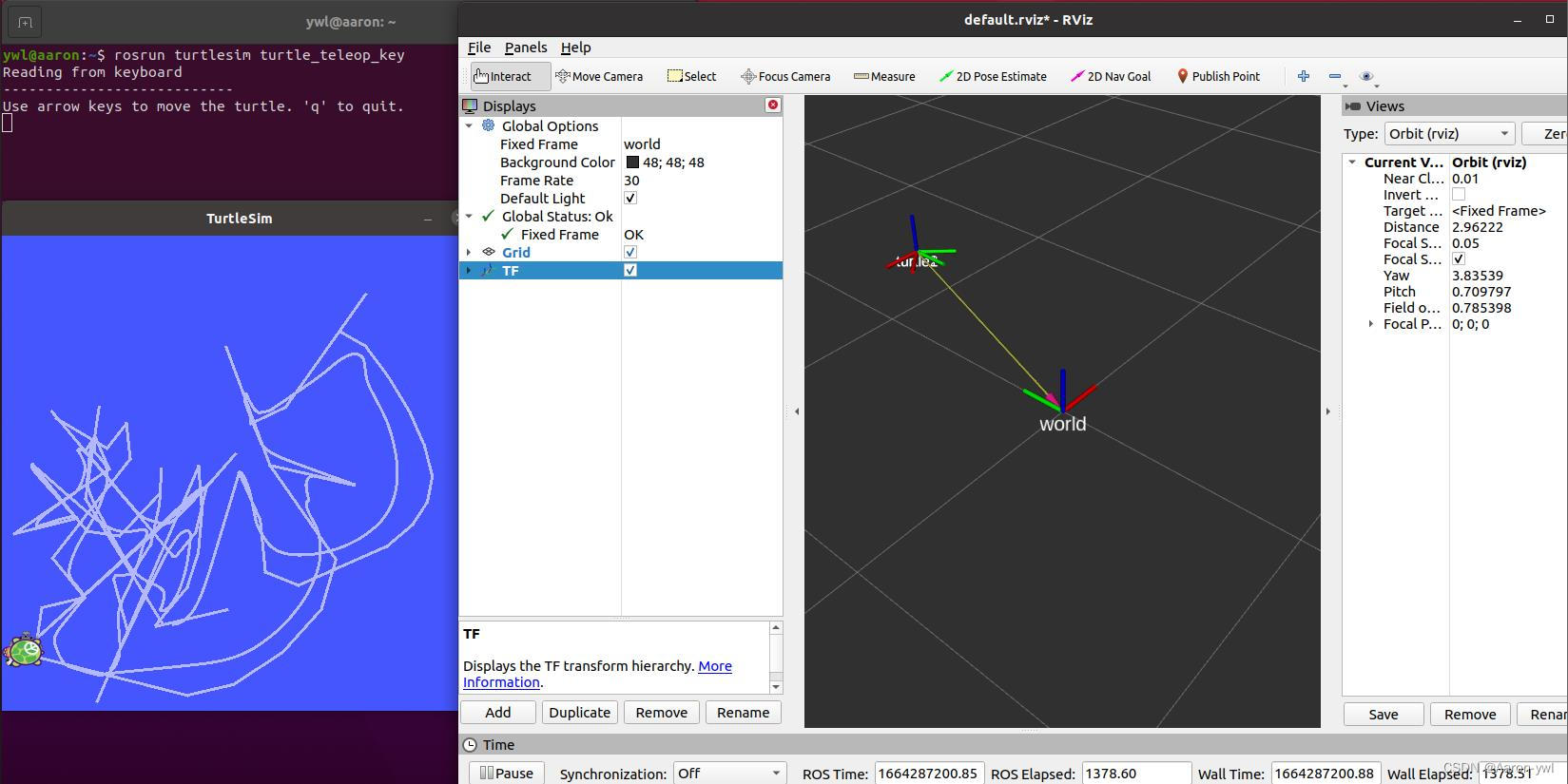
3.3.2 rviz
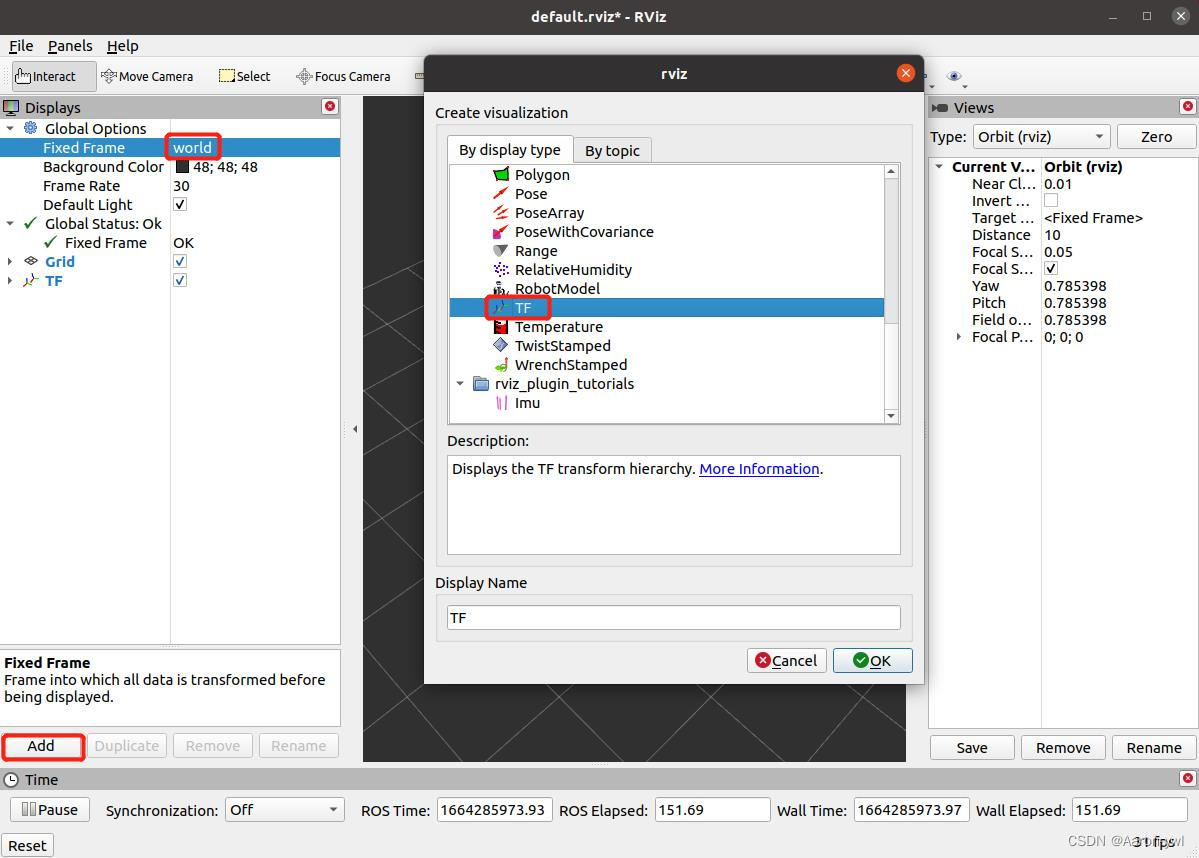
我们可以打开rviz工具:
rosrun rviz rviz -d `rospack find turtle_tf` /rviz/turtle_rviz.rviz
打开界面之后,在上面的Fixed Frame选择world
在左下角的add添加TF。就可以看到三个坐标系了。
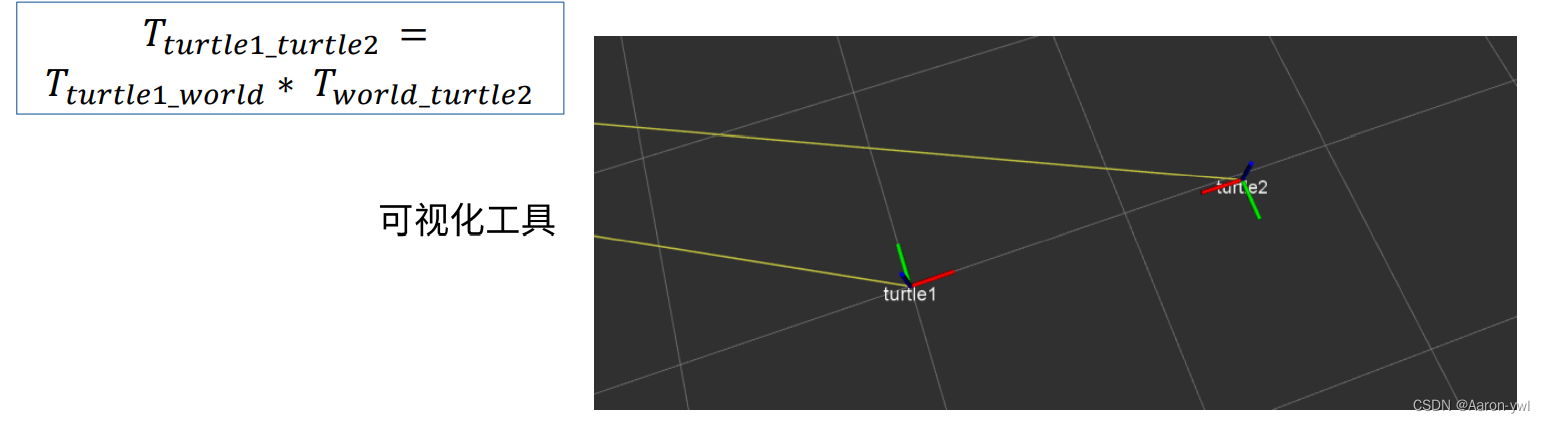
最后,控制小海龟运动,坐标系发生改变,然后坐标系turtle2原点会靠近turtle1原点:
下图中左边变换矩阵的运算,其实就是坐标移动的本质。两个坐标系相对于world坐标系的变换的乘积可以求得两个坐标系相对的变换关系。
相关文章:
ROS1学习笔记:ROS中的坐标管理系统(ubuntu20.04)
参考B站古月居ROS入门21讲:ROS中的坐标系管理系统 基于VMware Ubuntu 20.04 Noetic版本的环境 文章目录一、机器人中的坐标变换二、TF功能包三、小海龟跟随实验3.1 启动实验3.2 查看当前的TF树3.3 坐标相对位置可视化3.3.1 tf_echo3.3.2 rviz一、机器人中的坐标变换…...

requests---(2)session简介与自动写博客
目录:导读 session简介 session登录 自动写博客 获取登录cookies 抓取写博客接口 requests自动写博客 写在最后 http协议是无状态的,也就是每个请求都是独立的。那么登录后的一系列动作,都需要用cookie来验证身份是否是登录状态&#…...
基于 HAProxy + Keepalived 搭建 RabbitMQ 高可用集群
RabbitMQ 集群 通常情况下,在集群中我们把每一个服务称之为一个节点,在 RabbitMQ 集群中,节点类型可以分为两种: 内存节点:元数据存放于内存中。为了重启后能同步数据,内存节点会将磁盘节点的地址存放于磁…...
基于51单片机和proteus的智能调速风扇设计
此智能风扇是基于51单片机和proteus的仿真设计,功能如下: 1. Timer0 PWM控制电机转速 2. DHT11采集温湿度 3. LCD1602显示温湿度及电机状态 4. 按键控制电机加减速启停等 5. 串口控制电机加减速启停等 功能框图如下: Proteus仿真界面如下…...
SQL Server开启CDC的完整操作过程
这里写自定义目录标题写在前面SQL Server开启CDC1. 将指定库的实例先开启CDC2. 开启需要开启CDC的表3. 关闭CDC功能更详细信息参照官网写在前面 鉴于老旧数据的结构和项目都在sqlserver上存储,且迁移成本巨大,当下要为sqlserver的存储过程减负。要将一部…...
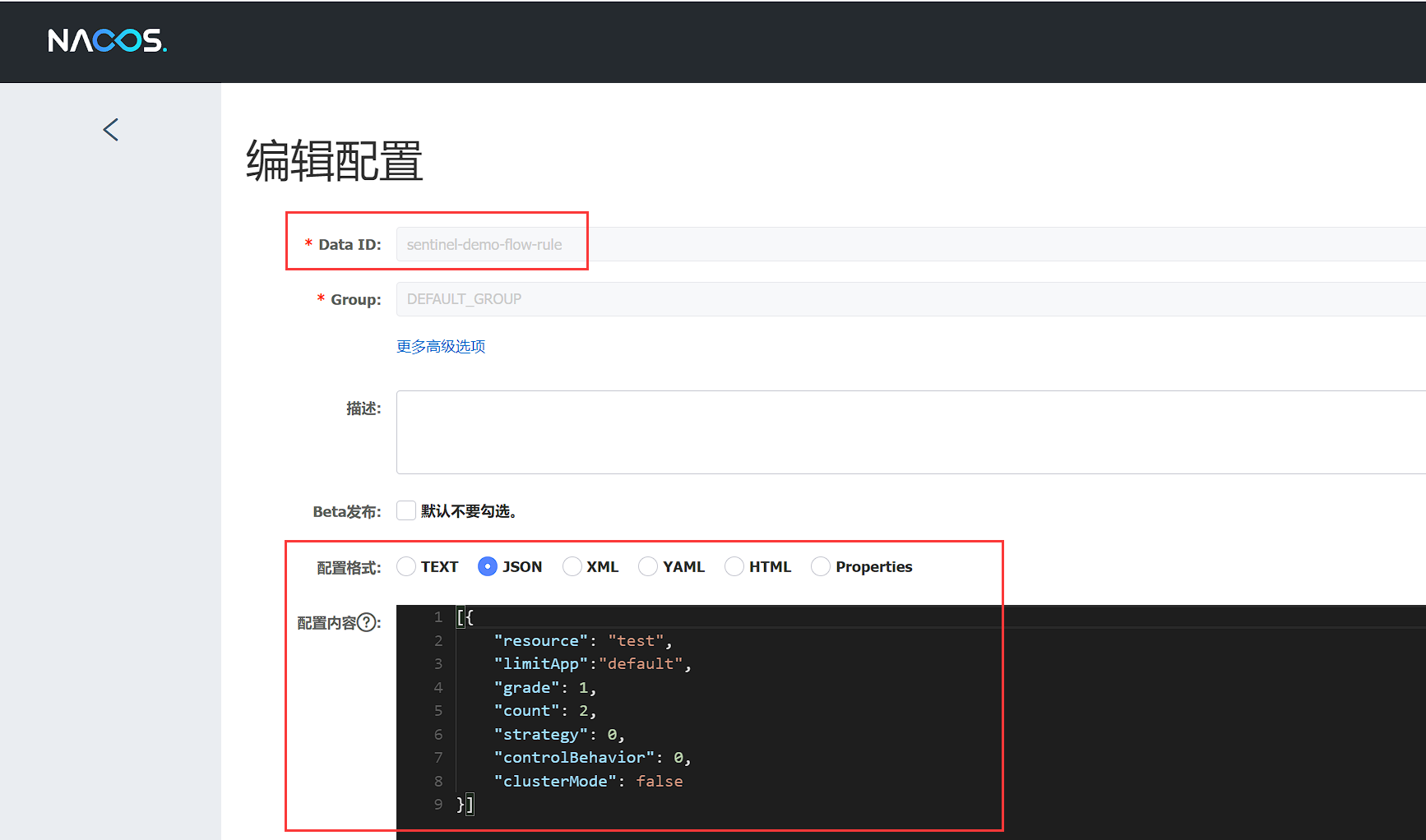
【Spring Cloud Alibaba】008-Sentinel
【Spring Cloud Alibaba】008-Sentinel 文章目录【Spring Cloud Alibaba】008-Sentinel一、服务雪崩1、概述2、解决方案常见的容错机制二、Sentinel:分布式系统的流量防卫兵1、**Sentinel** 概述简介特性Sentinel 的开源生态Sentinel 的历史2、Sentinel 基本概念资源…...

解读CRC校验计算
个人随笔 (Owed by: 春夜喜雨 http://blog.csdn.net/chunyexiyu) 参考:http://www.sunshine2k.de/articles/coding/crc/understanding_crc.html 参考:https://en.wikipedia.org/wiki/Cyclic_redundancy_check 参考:https://www.cnblogs.com/…...
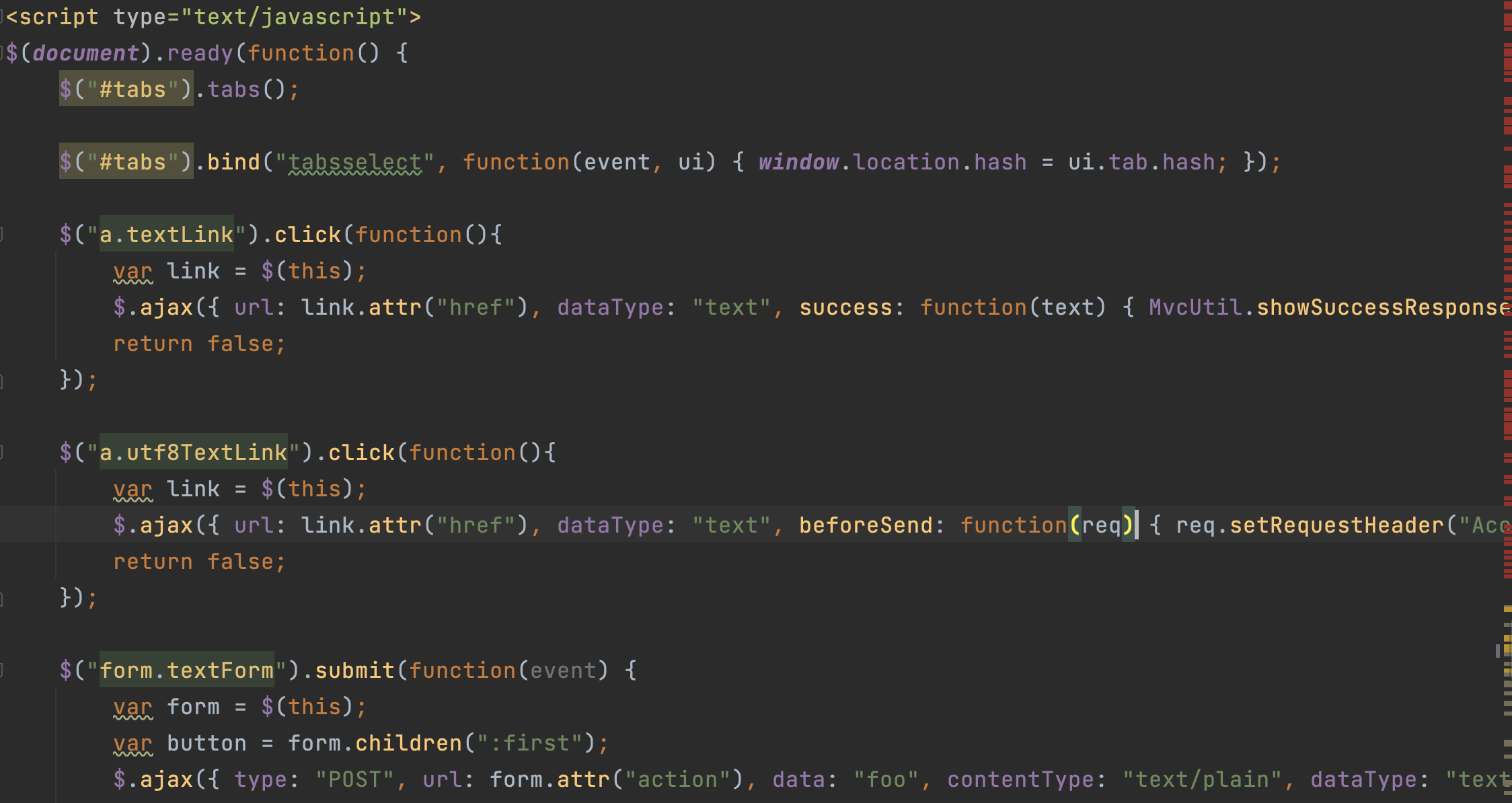
深入理解Spring MVC下
上一篇博客从理论概念上来梳理Spring MVC相关知识,此篇博客将通过spring官网提供showcase代码为例子,详细介绍showcase代码中包含的各个例子是如何实现的。官网的showcase代码包含的主要例子包括,Demo地址:Mapping Requests&#…...

【Linux】ssh-keygen不需要回车,自动生成密钥,批量免密操作!
使用命令ssh-keygen 需要手动敲击回车,才会生成密钥,如下代码所示 [rootlocalhost ~]# ssh-keygen Generating public/private rsa key pair. Enter file in which to save the key (/root/.ssh/id_rsa): Enter passphrase (empty for no passphrase):…...

C/C++开发,无可避免的内存管理(篇四)-智能指针备选
一、智能指针 采用C/C开发堆内存管理无论是底层开发还是上层应用,无论是开发新手,还是多年的老手,都会不自觉中招,尤其是那些不是自己一手经历的代码,要追溯问题出在哪里更是个麻烦事。C/C程序常常会遇到程序突然退出&…...
VMware ESXi给虚拟机扩容
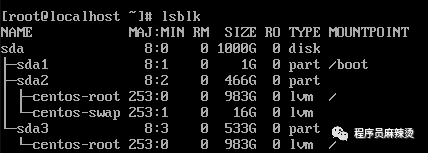
用ESXi管理的虚拟机硬盘空间不够了,讲一下如何进行扩容。 一、查看现状 通过如下三个命令,可以查看硬盘情况,可以看到只有500G,已经用了45%。这次我们再扩容500G。 df -Th lsblk fdisk -lIDE磁盘的文件名为 /de…...
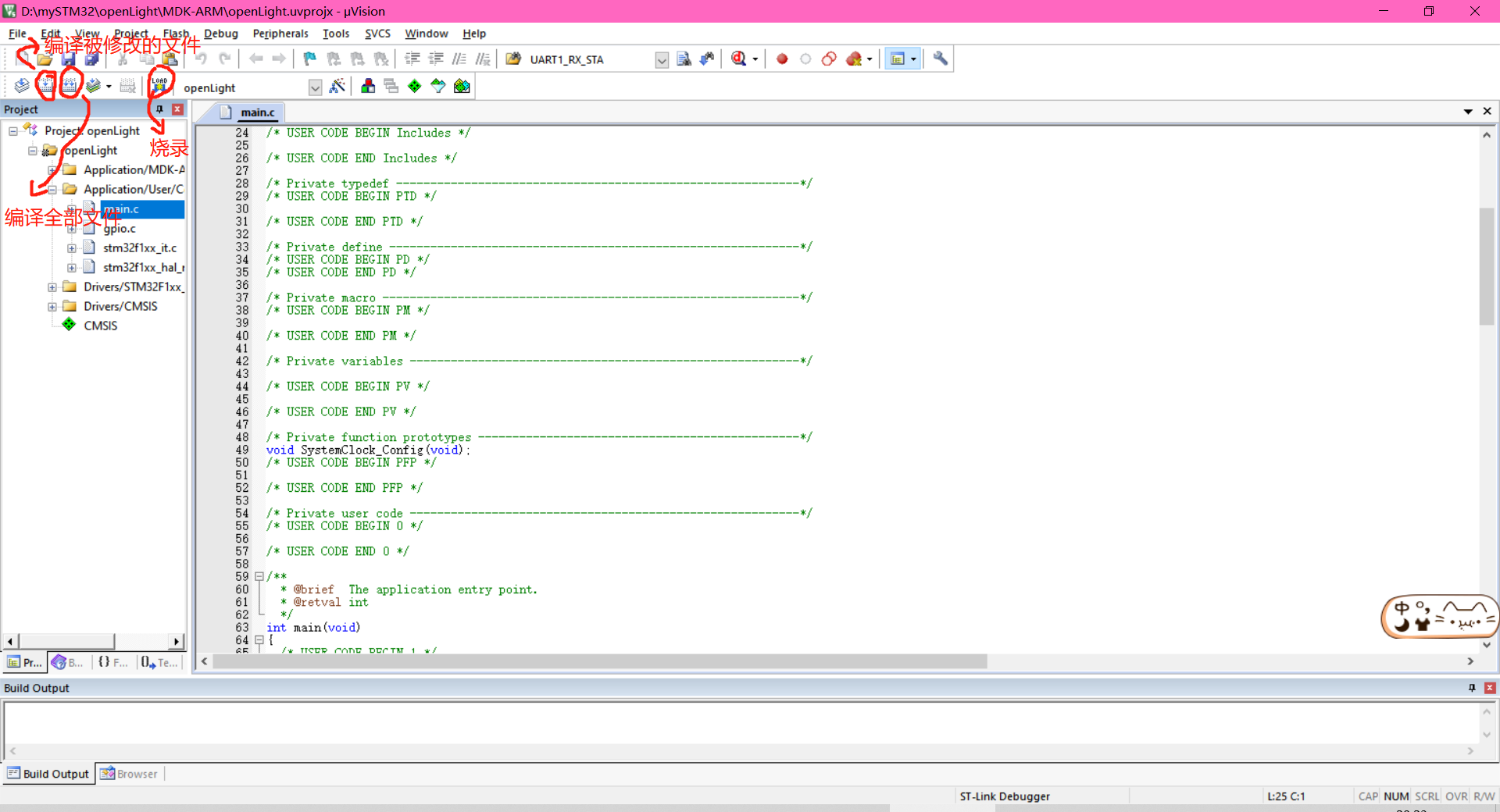
认识STM32和如何构建STM32工程
STM32介绍什么是单片机单片机(Single-Chip Microcomputer)是一种集成电路芯片,把具有数据处理能力的中央处理器CPU、随机存储器RAM、只读存储器ROM、多种/0口和中断系统、定时器/计数器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、A/D转换器等电…...

RabbitMQ延迟队列
目录 一、概念 二、使用场景 三、RabbitMQ 中的 TTL (一)队列设置 TTL (二)消息设置 TTL (三)两者的区别 四、整合SpringBoot实现延迟队列 (一)创建项目 (二&am…...
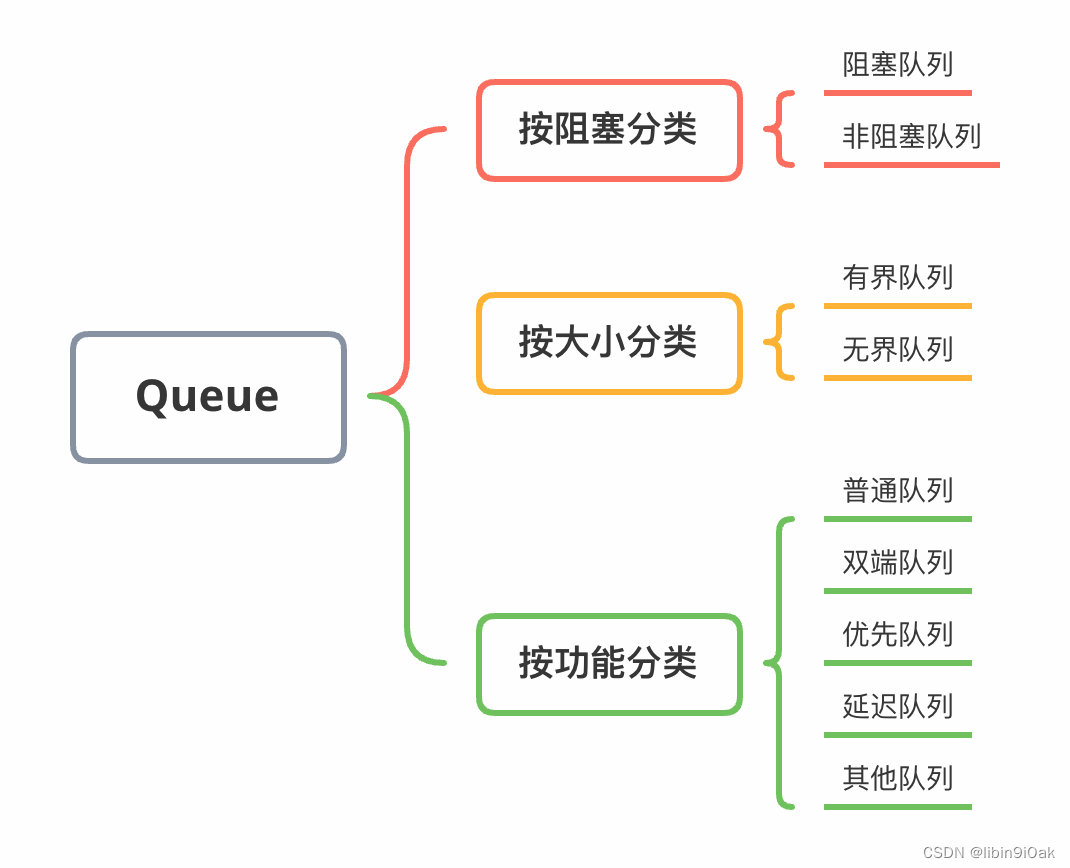
Java中常用的七种队列你了解多少?
文章目录Java中常用的七种队列你了解多少?ArrayBlockingQueue队列如何使用?添加元素到队列获取队列中的元素遍历队列LinkedBlockingQueue队列如何使用?1. 创建SynchronousQueue对象2. 添加元素到队列3. 获取队列中的元素4. 遍历队列SynchronousQueue队列…...
)
<Java获取时间日期工具类>常见八种场景(一)
一:自定义时间日期工具类常用的八种方式(整理): 0,getTimeSecondNum:时间日期转成秒数,常用于大小比较 1,getLastYearMonthLastDay:获取去年当月最后一天的时间日期 2,getLastYearM…...

接上一篇 对多个模型环形旋转进行优化 指定旋转位置
using System.Collections; using System.Collections.Generic; using UnityEngine; using DG.Tweening; public class ModelAnimal : MonoBehaviour { //记录鼠标滑动 public Vector2 lastPos;//鼠标上次位置 Vector2 currPos;//鼠标当前位置 Vector2 offset;//两次位置的偏移…...
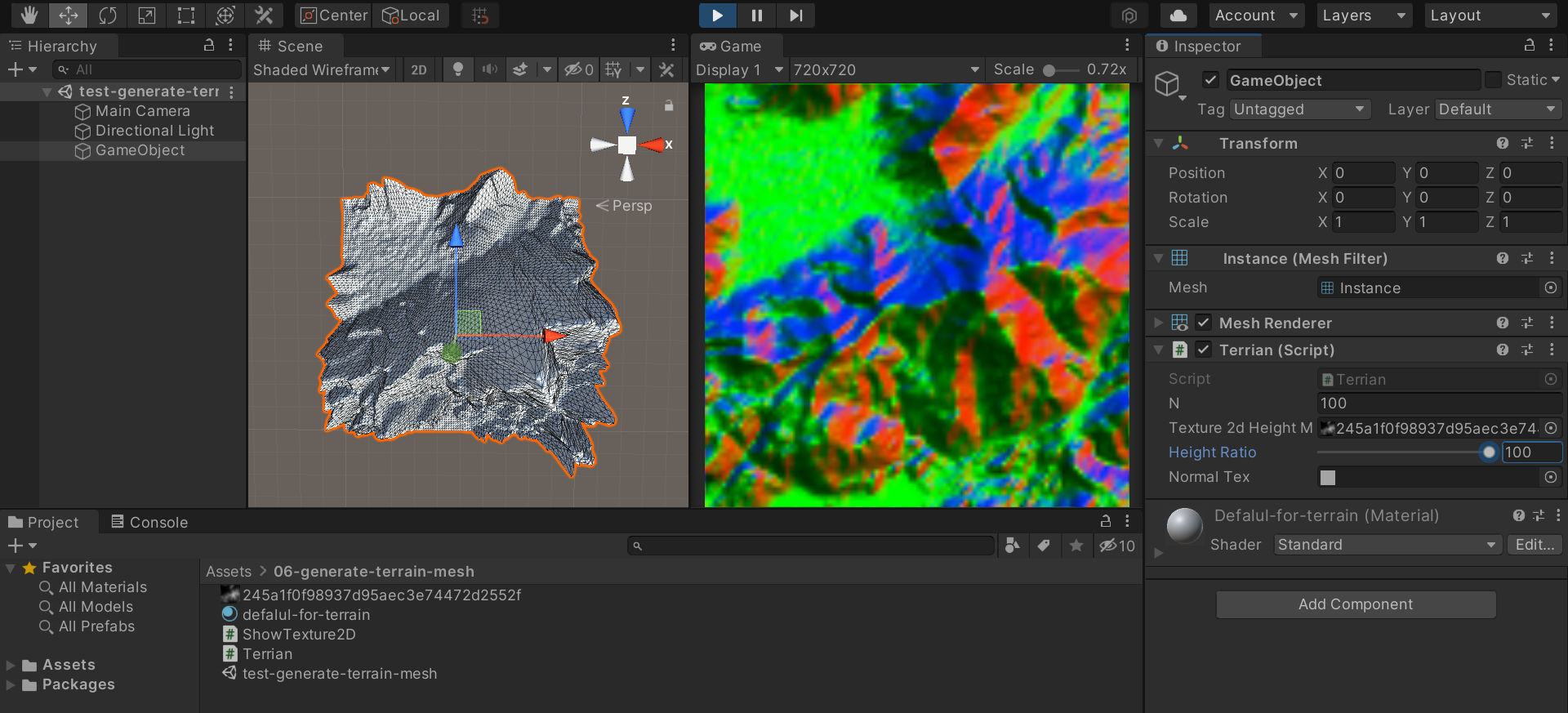
Unity中获取地形的法线
序之前,生成了地形图:(42条消息) 从灰度图到地形图_averagePerson的博客-CSDN博客那末,地形的法线贴图怎么获取?大概分为两个部分吧,先拿到法线数据,再画到纹理中去。关于法线计算Unity - Scripting API: M…...
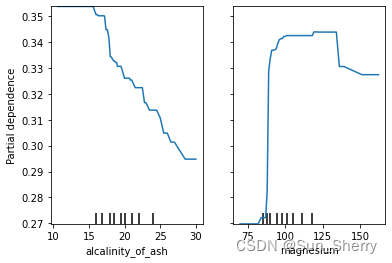
模型解释性:PFI、PDP、ICE等包的用法
本篇主要介绍几种其他较常用的模型解释性方法。 1. Permutation Feature Importance(PFI) 1.1 算法原理 置换特征重要性(Permutation Feature Importance)的概念很简单,其衡量特征重要性的方法如下:计算特征改变后模型预测误差的增加。如果打乱该特征的…...
)
spring常见面试题(2023最新)
目录前言1.spring是什么2.spring的设计核心是什么3.IOC和AOP面试题4.spring的优点和缺点5.spring中bean的作用域6.spring中bean的注入方式7.BeanFactory 和 ApplicationContext有什么区别?8.循环依赖的情况,怎么解决?9.spring中单例Bean是线程…...

华为OD机试题,用 Java 解【压缩报文还原】问题
最近更新的博客 华为OD机试题,用 Java 解【停车场车辆统计】问题华为OD机试题,用 Java 解【字符串变换最小字符串】问题华为OD机试题,用 Java 解【计算最大乘积】问题华为OD机试题,用 Java 解【DNA 序列】问题华为OD机试 - 组成最大数(Java) | 机试题算法思路 【2023】使…...

ComfyUI-Manager完全指南:掌握AI工作流管理的核心技术
ComfyUI-Manager完全指南:掌握AI工作流管理的核心技术 【免费下载链接】ComfyUI-Manager ComfyUI-Manager is an extension designed to enhance the usability of ComfyUI. It offers management functions to install, remove, disable, and enable various custo…...

UE5项目打包后RenderTarget导出图片全黑?手把手教你解决伽马校正与资产打包问题
UE5打包后RenderTarget导出图片全黑的终极解决方案当你花了整整三天时间调试RenderTarget导出功能,终于在编辑器里看到完美的截图效果,却在打包成可执行文件后发现所有导出的图片都变成了一片漆黑——这种从云端跌入谷底的感觉,每个UE开发者都…...

地理空间机器学习库全解析:从TorchGeo到Raster Vision的实战指南
1. 项目概述:为什么我们需要专门的地理空间机器学习库?如果你尝试过用标准的PyTorch或TensorFlow去处理一张卫星影像,大概率会在第一步就卡住。不是模型写不出来,而是数据根本读不进去,或者读进去了却对不上位置。一张…...

Redis在线工具终极指南:3分钟学会数据库操作,无需安装配置
Redis在线工具终极指南:3分钟学会数据库操作,无需安装配置 【免费下载链接】try.redis A demonstration of the Redis database. 项目地址: https://gitcode.com/gh_mirrors/tr/try.redis 还在为Redis环境配置而烦恼吗?还在为测试一个…...

XZ9971,60V,5A,NMOS 封装:SOT223
封装:SOT223类型:NVDS:60V VGS: 20V ID:5ARDS(ON):10V <50mΩRDS(ON):4.5V <60mΩ型号: XZ9971 封装:SOT223类型&…...

5步快速上手OpenVSP:免费开源的飞机参数化设计终极指南
5步快速上手OpenVSP:免费开源的飞机参数化设计终极指南 【免费下载链接】OpenVSP A parametric aircraft geometry tool 项目地址: https://gitcode.com/gh_mirrors/ope/OpenVSP OpenVSP是一款由NASA开发的免费开源飞机参数化设计工具,让航空工程…...

思源宋体完全免费商用指南:7种字重中文开源字体终极教程
思源宋体完全免费商用指南:7种字重中文开源字体终极教程 【免费下载链接】source-han-serif-ttf Source Han Serif TTF 项目地址: https://gitcode.com/gh_mirrors/so/source-han-serif-ttf 想要为你的中文设计项目找到一款既专业又完全免费的高质量字体吗&a…...
)
Windows11上VMware Workstation 16.1.1保姆级安装与Win11虚拟机配置全流程(含激活与优化)
Windows 11 虚拟化开发环境搭建全指南:从 VMware 安装到系统优化虚拟化技术已经成为现代开发者和运维人员的必备技能。想象一下,你正在开发一个需要跨平台测试的应用程序,或者需要在不影响主系统的情况下尝试新软件——这时候一个可靠的虚拟化…...

项目文档:基于Multisim的四路带计分系统抢答器设计与仿真
摘要:本项目设计了一个四路带计分系统的智能抢答器,具有声光显示、计时和计分功能。使用Multisim 14.3进行电路设计 与仿真验证。项目简介本项目设计了一个基于Multisim的四路带计分系统智能抢答器,采用74系列数字逻辑芯片实现纯硬件电路设计…...

Recuva数据恢复实测:文件被电脑管家粉碎后还能救回来吗?
Recuva数据恢复实战:不同删除方式下的恢复效果对比 当重要文件被误删时,数据恢复工具往往成为最后的救命稻草。但你是否想过,不同的删除方式会对恢复成功率产生怎样的影响?本文将带你深入探索Recuva这一经典数据恢复工具在面对普通…...