ROS从入门到精通2-6:Rviz可视化进阶(画坐标轴、直线、平面、圆柱等)
目录
- 0 专栏介绍
- 1 Rviz可视化
- 2 环境配置
- 3 使用方法
- 4 测试用例
0 专栏介绍
本专栏旨在通过对ROS的系统学习,掌握ROS底层基本分布式原理,并具有机器人建模和应用ROS进行实际项目的开发和调试的工程能力。
🚀详情:《ROS从入门到精通》
1 Rviz可视化
ROS提供了三维可视化工具Rviz,用于可视化传感器的数据和状态信息。在Rviz中可以通过图形化的方式,实时显示机器人传感器的信息、机器人的运动状态、周围环境的变化等。
Rviz的基础操作详见:
- ROS从入门到精通2-1:机器人3D可视化工具——Rviz
- ROS从入门到精通2-4:Rviz插件制作实战案例(以多点连续导航插件为例)
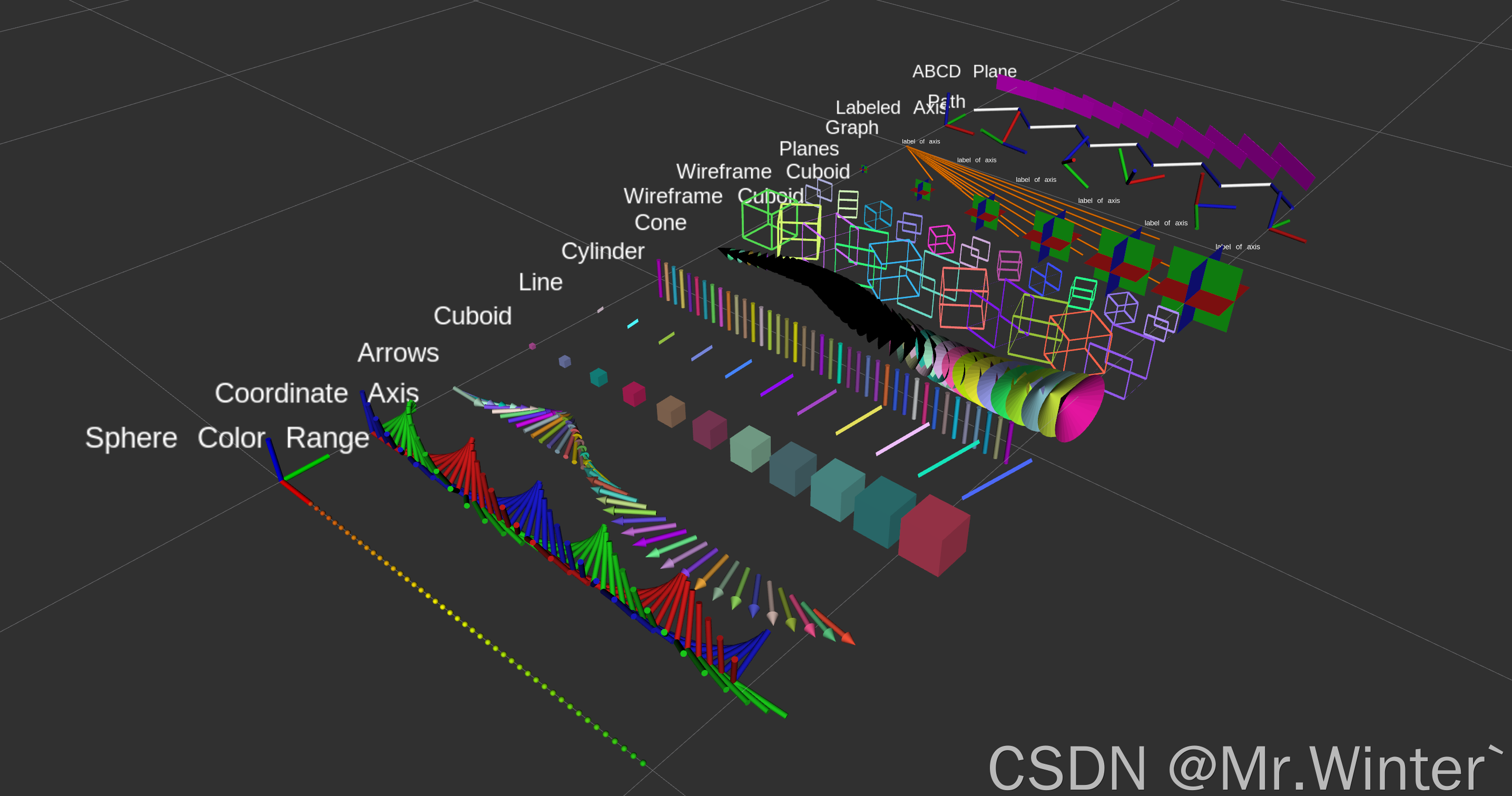
本文介绍Rviz的进阶使用,效果如下所示,可以实现坐标轴、坐标系、直线、平面、点列、圆柱等多种Marker的可视化。
2 环境配置
下载可视化库
git clone https://github.com/PickNikRobotics/rviz_visual_tools
初次编译可能会遇到以下问题
-
-- Could NOT find eigen_stl_containers (missing: eigen_stl_containers_DIR) -- Could not find the required component 'eigen_stl_containers'. The following CMake error indicates that you either need to install the package with the same name or change your environment so that it can be found.解决方案:
git clone https://github.com/AcutronicRobotics/eigen_stl_containers -
-- Could NOT find graph_msgs (missing: graph_msgs_DIR) -- Could not find the required component 'graph_msgs'. The following CMake error indicates that you either need to install the package with the same name or change your environment so that it can be found.解决方案:
sudo apt-get install ros-noetic-graph-msgs
最后一起编译即可
catkin_make
3 使用方法
rviz_visual_tools提供了很多方便的可视化API
- publishSphere
- publishSpheres
- publishArrow/publishXArrow
- publishYArrow
- publishZArrow
- publishCuboid
- publishCone
- publishXYPlane
- publishXZPlane
- publishYZPlane
- publishLine
- publishPath
- publishPolygon
- publishBlock
- publishWireframeCuboid
- publishWireframeRectangle
- publishAxis
- publishAxisLabeled
- publishCylinder
- publishMesh
- publishText
- publishTest
rviz_visual_tools提供了下述可选的颜色
- BLACK,
- BLUE,
- BROWN,
- CYAN,
- DARK_GREY,
- GREEN,
- GREY,
- LIME_GREEN,
- MAGENTA,
- ORANGE,
- PINK,
- PURPLE,
- RED,
- WHITE,
- YELLOW,
- TRANSLUCENT_LIGHT,
- TRANSLUCENT,
- TRANSLUCENT_DARK,
- RAND,
- CLEAR,
- DEFAULT
以及下述大小
- XXXXSMALL,
- XXXSMALL,
- XXSMALL,
- XSMALL,
- SMALL,
- MEDIUM,
- LARGE,
- XLARGE,
- XXLARGE,
- XXXLARGE,
- XXXXLARGE,
4 测试用例
比如要可视化一个三维位姿
#include <rviz_visual_tools/rviz_visual_tools.h>// For visualizing things in rviz
rviz_visual_tools::RvizVisualToolsPtr visual_tools_;// Change the first parameter to the name of your robot's base frame,
// and the second parameter to whatever name you'd like to use for the corresponding Rviz marker ROS topic.
visual_tools_.reset(new rviz_visual_tools::RvizVisualTools("base_frame","/rviz_visual_markers"));// Create pose
Eigen::Isometry3d pose;
pose = Eigen::AngleAxisd(M_PI/4, Eigen::Vector3d::UnitY()); // rotate along X axis by 45 degrees
pose.translation() = Eigen::Vector3d( 0.1, 0.1, 0.1 ); // translate x,y,z// Publish arrow vector of pose
ROS_INFO_STREAM_NAMED("test","Publishing Arrow");
visual_tools_->publishArrow(pose, rviz_visual_tools::RED, rviz_visual_tools::LARGE);// publish
visual_tools_->trigger();
本文的完整工程代码联系下方博主名片获取
🔥 更多精彩专栏:
- 《ROS从入门到精通》
- 《Pytorch深度学习实战》
- 《机器学习强基计划》
- 《运动规划实战精讲》
- …
相关文章:
ROS从入门到精通2-6:Rviz可视化进阶(画坐标轴、直线、平面、圆柱等)
目录0 专栏介绍1 Rviz可视化2 环境配置3 使用方法4 测试用例0 专栏介绍 本专栏旨在通过对ROS的系统学习,掌握ROS底层基本分布式原理,并具有机器人建模和应用ROS进行实际项目的开发和调试的工程能力。 🚀详情:《ROS从入门到精通》…...
Linux命令之lz4命令
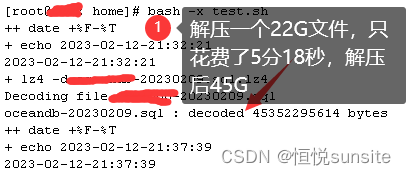
一、lz4命令简介 LZ4是一种压缩格式,特点是压缩/解压缩速度超快(压缩率不如gzip),如果你特别在意压缩速度,或者当前环境的CPU资源紧缺,可以考虑这种格式。lz4是一种非常快速的无损压缩算法,基于字节对齐LZ77系列压缩方…...

强强角逐,筑梦开源| 2022年度启智社区优秀项目及开发者评选结果正式揭晓
2月24日,第四届OpenI/O启智开发者大会在深圳隆重开幕。本届大会以“算网筑基、开源启智、AI赋能”为主题,邀请国内人工智能开源领域领军院士亲自参加,汇聚学术界、产业界的技术专家,围绕中国算力网资源基座、开源社区服务支撑环境…...

【使用两个队列实现栈】
文章目录前言使用两个队列实现栈1.队列接口函数引入2.栈的初始化3.向栈中插入元素4.出栈操作5.取出栈顶元素6.判断栈是否为空7.释放内存空间总结前言 本文章主要介绍栈和队列的相互转换。 使用两个队列实现栈 我们知道,栈的特点是后进先出,而队列的特点…...
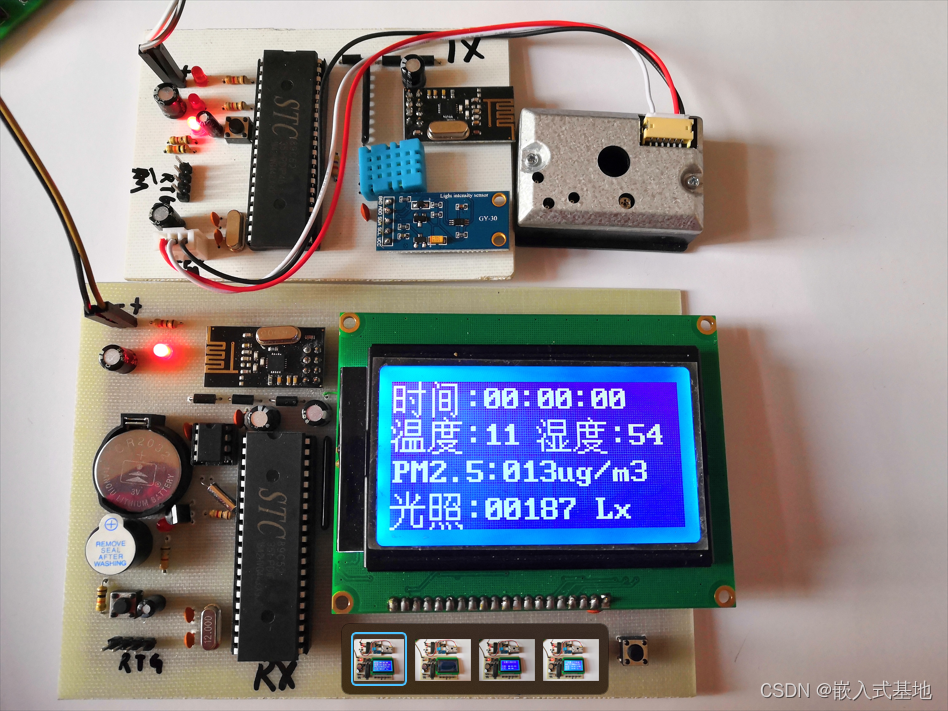
毕业设计 基于51单片机环境监测设计 光照 PM2.5粉尘 温湿度 2.4G无线通信
基于51单片机环境监测设计 光照 PM2.5粉尘 温湿度 2.4G无线通信1、项目简介1.1 系统构成1.2 系统功能2、部分电路设计2.1 STC89C52单片机核心系统电路设计2.2 dht11温湿度检测电路设计2.3 NRF24L01无线通信电路设计3、部分代码展示3.1 NRF24L01初始化3.2 NRF24L01的SPI写时序3.…...
PowerShell Install Rabbitmq
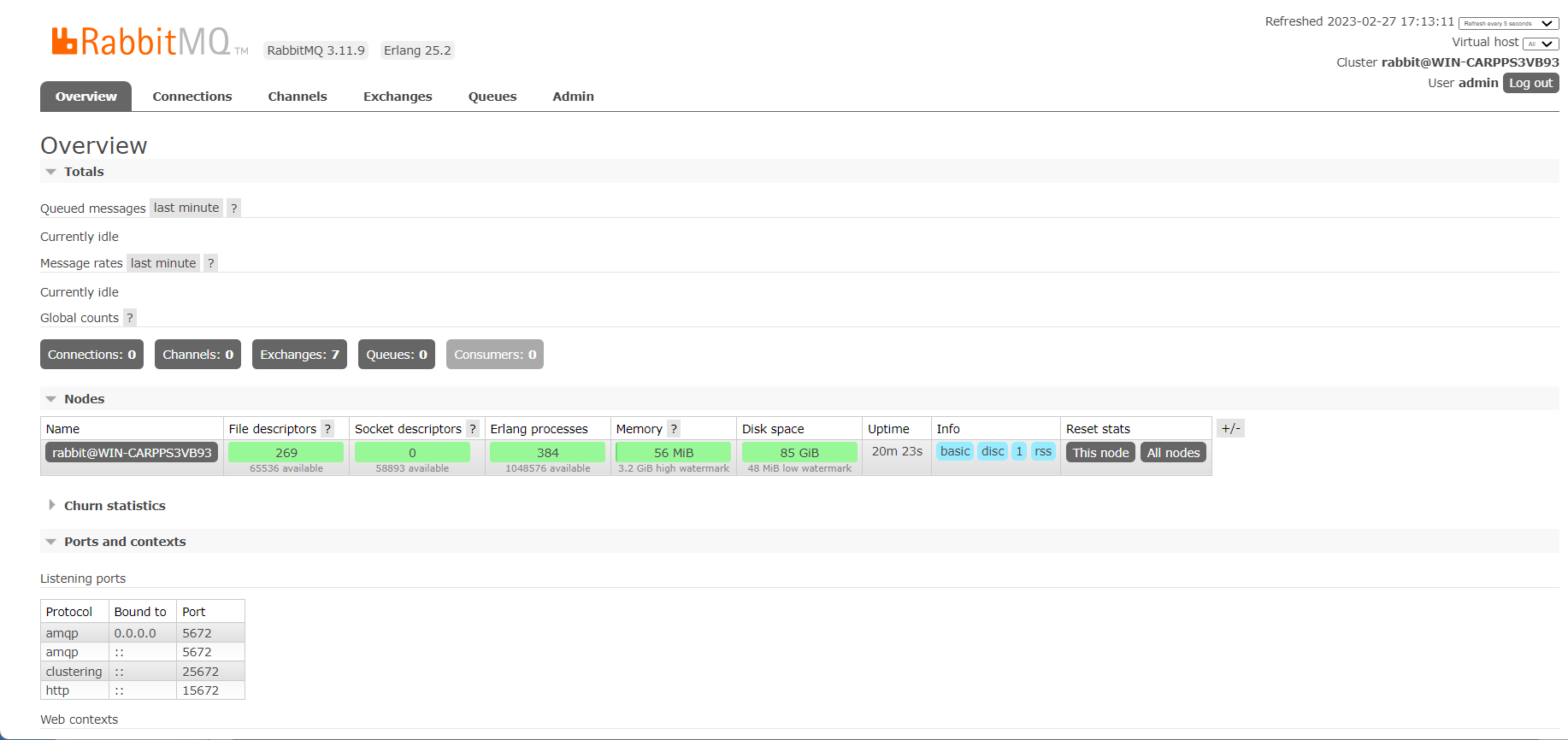
Rabbitmq 前言 RabbitMQ是实现了高级消息队列协议(AMQP)的开源消息代理软件(亦称面向消息的中间件)。RabbitMQ服务器是用Erlang语言编写的,而集群和故障转移是构建在开放电信平台框架上的。所有主要的编程语言均有与代…...

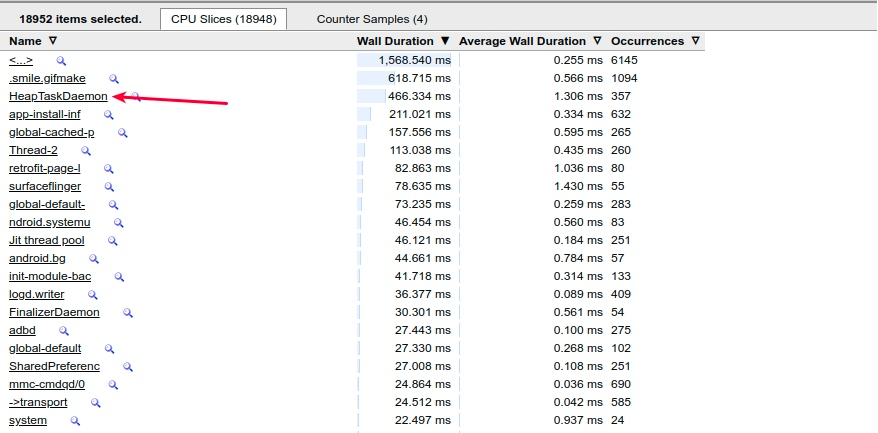
ASM 字节码插桩:隐私合规方法检测!
1.前言近两年来工信部对于应用的隐私合规安全问题愈加重视,对 Android 平台的管控程度也要比 IOS 平台严格很多,很多不合规的应用也先后被下架要求整改。笔者就曾遇到过加班整改隐私合规的问题,隐私合规问题主要针对两个方面。在用户同意隐私…...

spring data jpa使用流式查询
思路 调用org.hibernate.query.Query.stream方法查询数据 代码样例 import static org.hibernate.annotations.QueryHints.READ_ONLY; import static org.hibernate.jpa.QueryHints.HINT_FETCH_SIZE; import org.hibernate.query.Query;使用HQL查询 Query<MyEntity> …...
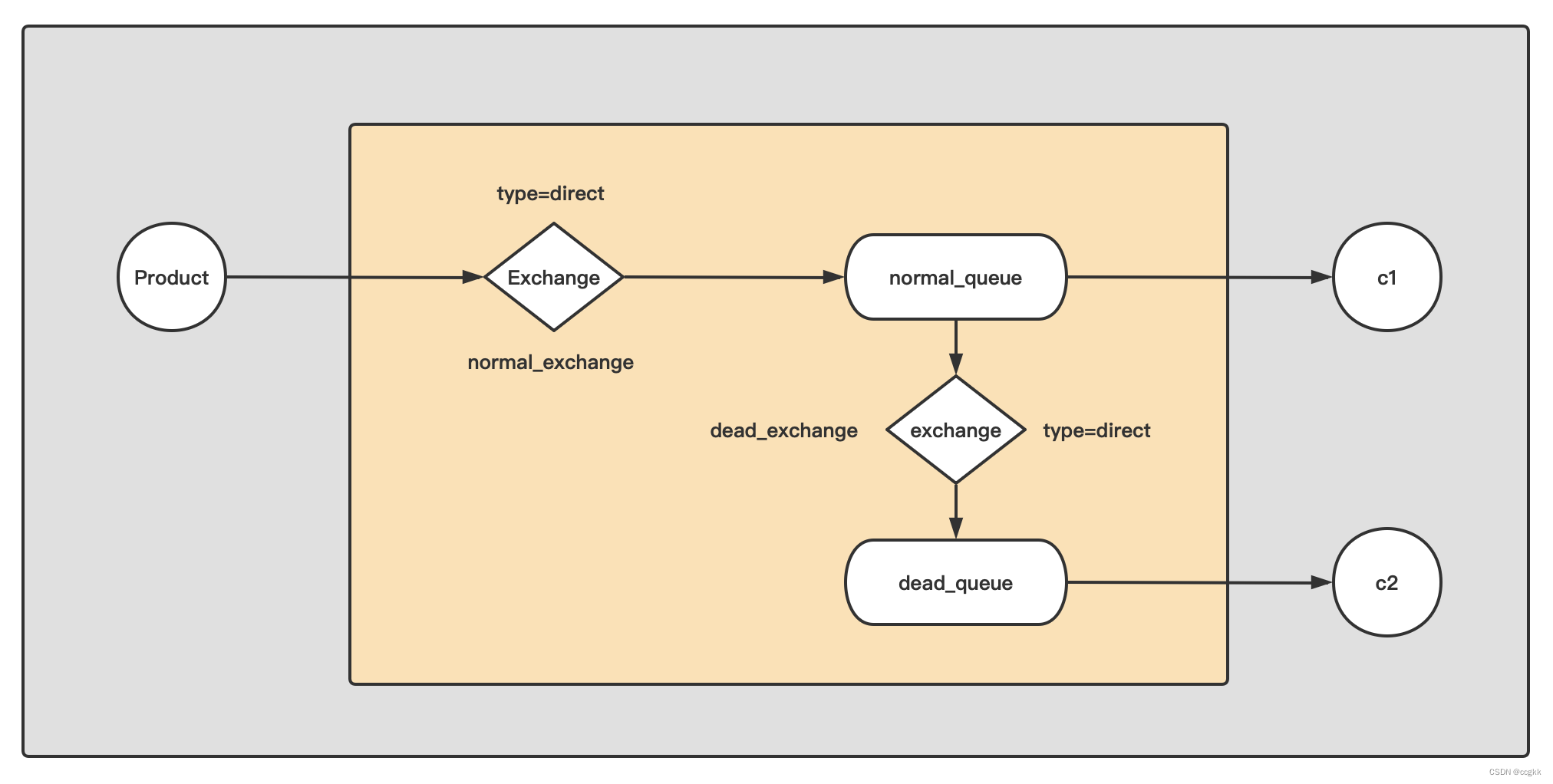
Golang实现RabbitMQ中死信队列各个情况
下面这段教程针对是你已经有一些基本的MQ的知识,比如说能够很清楚的理解queue、exchange等概念,如果你还不是很理解,我建议你先访问官网查看基本的教程。 文章目录1、造成死信队列的主要原因2、操作逻辑图3、代码实战3.1 针对原因1࿱…...
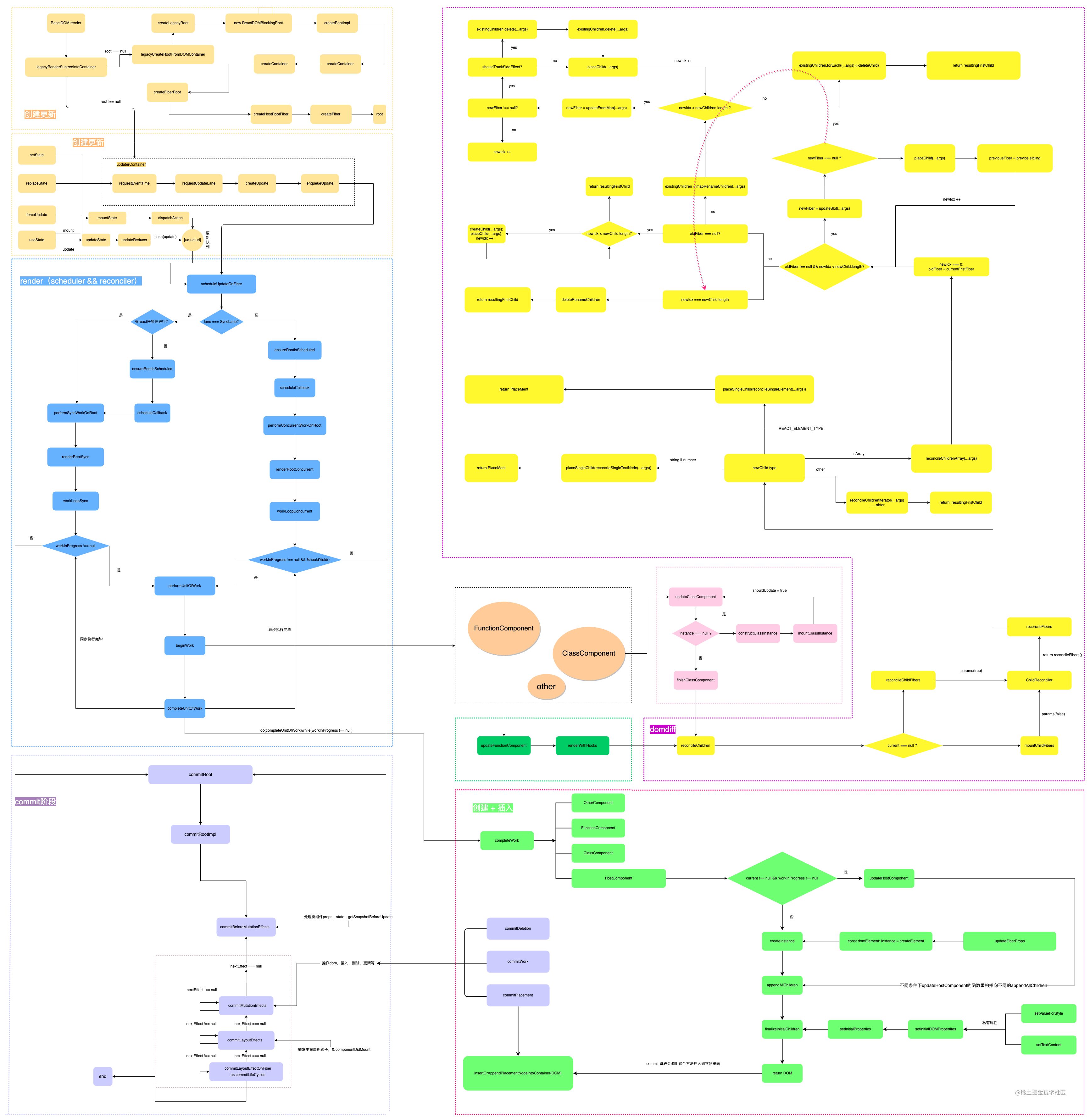
react源码分析:组件的创建和更新
这一章节就来讲讲ReactDOM.render()方法的内部实现与流程吧。 因为初始化的源码文件部分所涵盖的内容很多,包括创建渲染、更新渲染、Fiber树的创建与diff,element的创建与插入,还包括一些优化算法,所以我就整个的React执行流程画了…...
Android Lmkd 低内存终止守护程序
一、低内存终止守护程序 Android 低内存终止守护程序 (lmkd) 进程可监控运行中的 Android 系统的内存状态,并通过终止最不必要的进程来应对内存压力大的问题,使系统以可接受的性能水平运行。 所有应用进程都是从zygote孵化出来的,记录在AMS…...
快速掌握 Flutter 图片开发核心技能
大家好,我是 17。 在 Flutter 中使用图片是最基础能力之一。17 做了精心准备,满满的都是干货!本文介绍如何在 Flutter 中使用图片,尽量详细,示例完整,包会! 使用网络图片 使用网络图片超级简…...
)
复习使用git(二)
删除远程分支 git push origin --delete 分支名 撤销修改 撤销工作区的修改 已修改,但尚未添加(add),使用 git restore 文件名 撤销工作区的修改。 Note: “git checkout – 文件名”,checkout 检出的意思&#x…...

魔兽世界335服务端架设对外网开放的步骤
警告:在没有网络安全防护措施或基础知识的情况下,开放端口可能造成被黑客入侵、流量攻击、破坏数据、资料泄露等情况的发生。在你选择开放端口时,视为已经充分了解可能发生的后果、危害,清楚自己在做什么,并且自己将对…...

华为OD机试模拟题 用 C++ 实现 - 通信误码(2023.Q1)
最近更新的博客 【华为OD机试模拟题】用 C++ 实现 - 最多获得的短信条数(2023.Q1)) 文章目录 最近更新的博客使用说明通信误码题目输入输出示例一输入输出说明示例二输入输出说明Code使用说明 参加华为od机试,一定要注意不要完全背诵代码,需要理解之后模仿写出,...
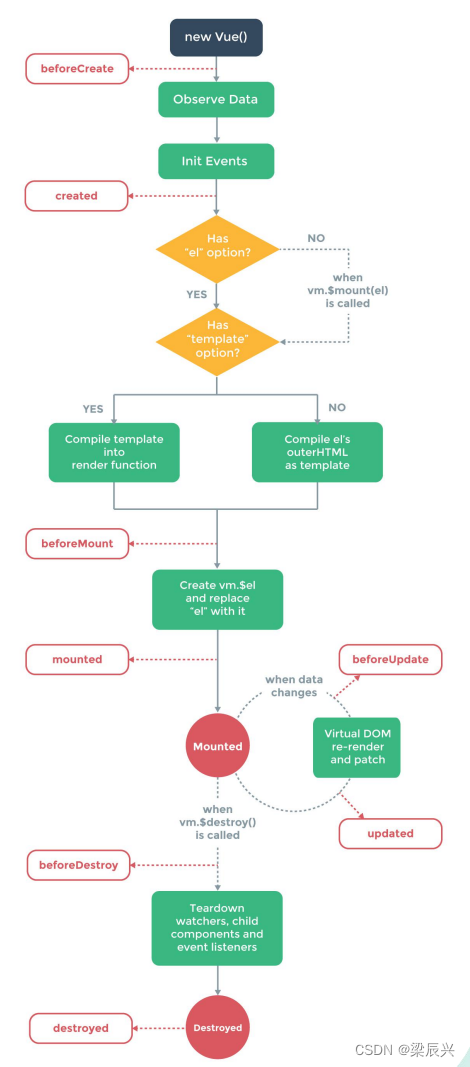
Vue 核心
文章目录Vue 核心一,Vue 简介(一)官网(二)介绍与描述(三)Vue 的特点(四)与其它 JS 框架的关联(五)Vue 周边库二,初识 Vue三࿰…...
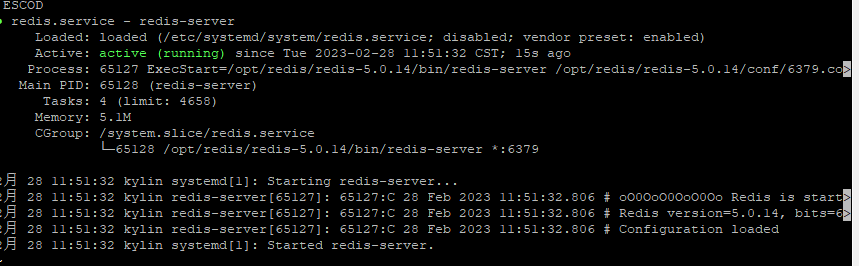
Kylin V10桌面版arm3568 源码安装redis
上传redis-5.0.14.tar.gz到/home/kylin/下载;解压kylinkylin:~/下载$ tar -zxvf redis-5.0.14.tar.gz/opt下新建redis目录,并将上面解压的文件夹移到此处kylinkylin:~/下载$ sudo mv redis-5.0.14 /opt/redis/编译:kylinkylin:/opt/redis/red…...
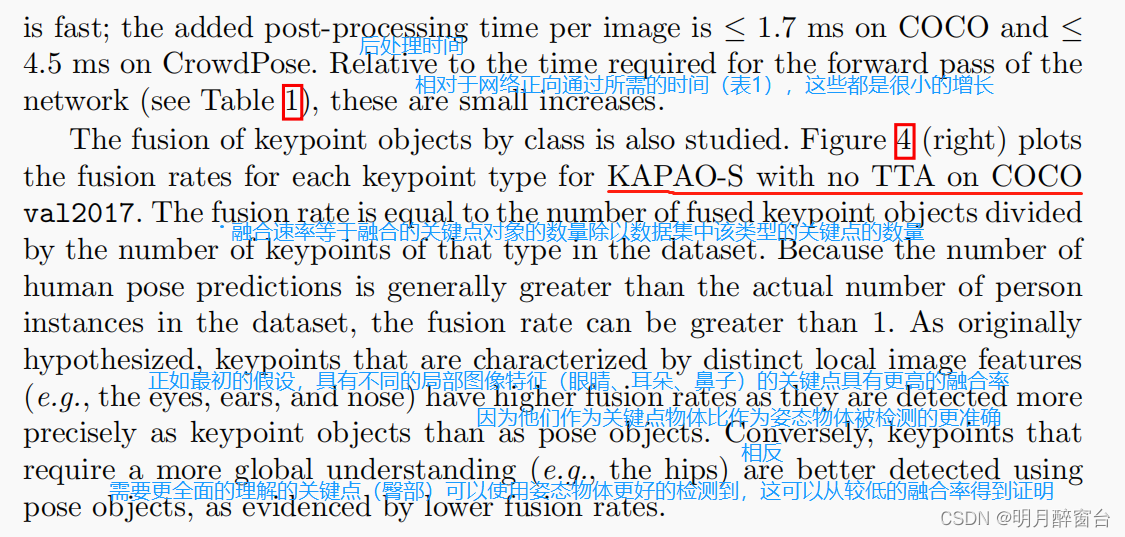
【ICCV2022】 CAPAO:一种高效的单阶段人体姿态估计模型
CAPAO:一种高效的单阶段人体姿态估计模型 重新思考关键点表示:将关键点和姿态建模作为多人姿态估计的对象(Rethinking Keypoint Representations: Modeling Keypoints and Poses as Objects for Multi-Person Human Pose Estimation…...
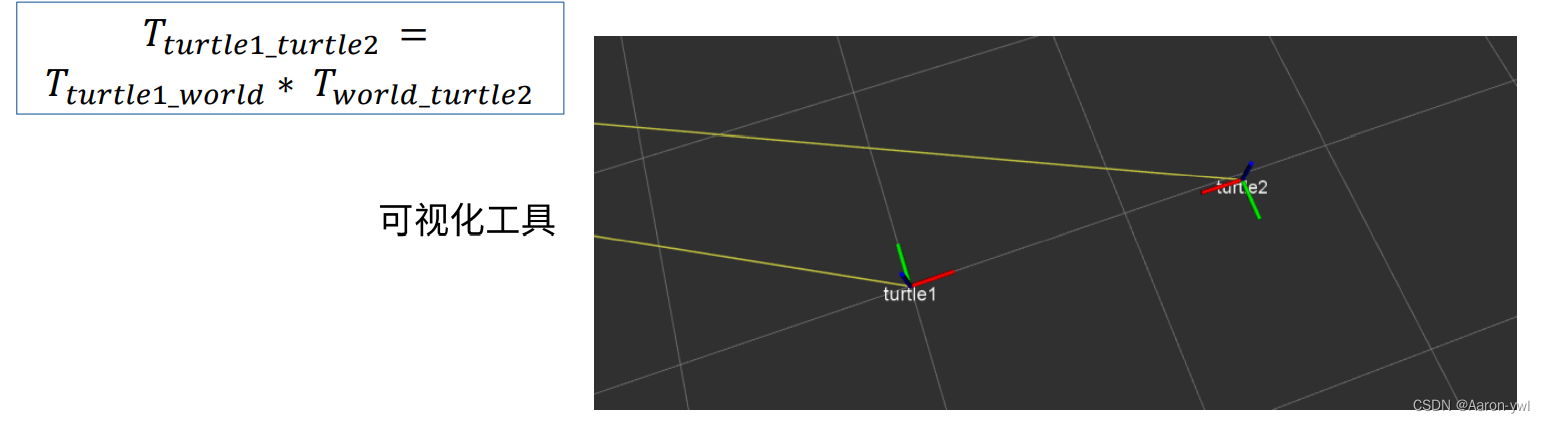
ROS1学习笔记:ROS中的坐标管理系统(ubuntu20.04)
参考B站古月居ROS入门21讲:ROS中的坐标系管理系统 基于VMware Ubuntu 20.04 Noetic版本的环境 文章目录一、机器人中的坐标变换二、TF功能包三、小海龟跟随实验3.1 启动实验3.2 查看当前的TF树3.3 坐标相对位置可视化3.3.1 tf_echo3.3.2 rviz一、机器人中的坐标变换…...

requests---(2)session简介与自动写博客
目录:导读 session简介 session登录 自动写博客 获取登录cookies 抓取写博客接口 requests自动写博客 写在最后 http协议是无状态的,也就是每个请求都是独立的。那么登录后的一系列动作,都需要用cookie来验证身份是否是登录状态&#…...

关于 WASM:1. WASM 基础原理
一、WASM 简介 1.1 WebAssembly 是什么? WebAssembly(WASM) 是一种能在现代浏览器中高效运行的二进制指令格式,它不是传统的编程语言,而是一种 低级字节码格式,可由高级语言(如 C、C、Rust&am…...
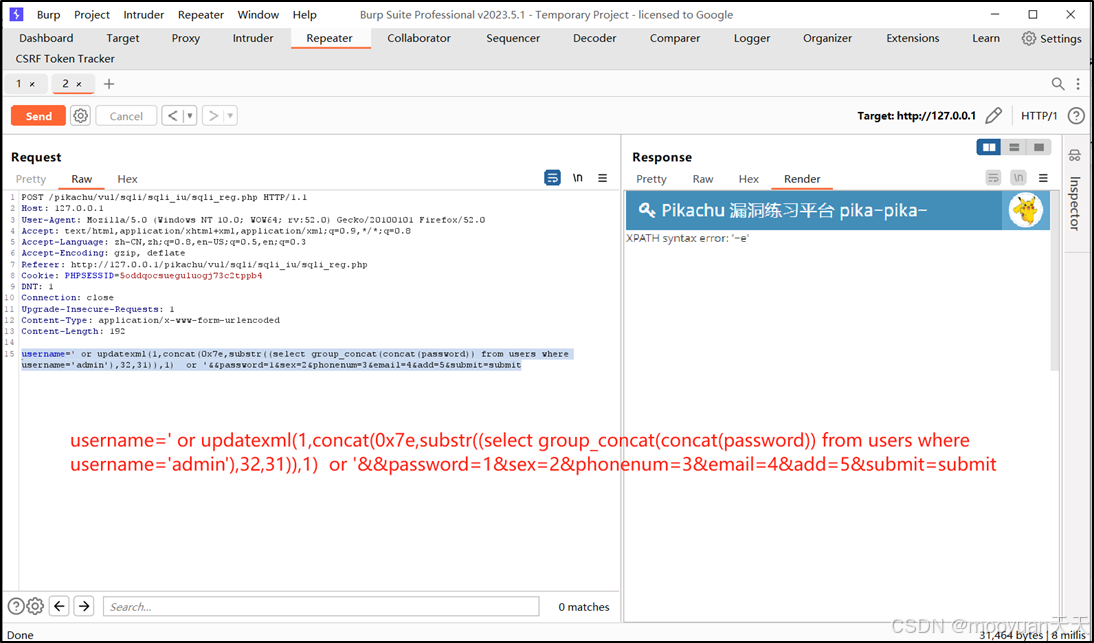
pikachu靶场通关笔记22-1 SQL注入05-1-insert注入(报错法)
目录 一、SQL注入 二、insert注入 三、报错型注入 四、updatexml函数 五、源码审计 六、insert渗透实战 1、渗透准备 2、获取数据库名database 3、获取表名table 4、获取列名column 5、获取字段 本系列为通过《pikachu靶场通关笔记》的SQL注入关卡(共10关࿰…...

算法笔记2
1.字符串拼接最好用StringBuilder,不用String 2.创建List<>类型的数组并创建内存 List arr[] new ArrayList[26]; Arrays.setAll(arr, i -> new ArrayList<>()); 3.去掉首尾空格...

关于uniapp展示PDF的解决方案
在 UniApp 的 H5 环境中使用 pdf-vue3 组件可以实现完整的 PDF 预览功能。以下是详细实现步骤和注意事项: 一、安装依赖 安装 pdf-vue3 和 PDF.js 核心库: npm install pdf-vue3 pdfjs-dist二、基本使用示例 <template><view class"con…...
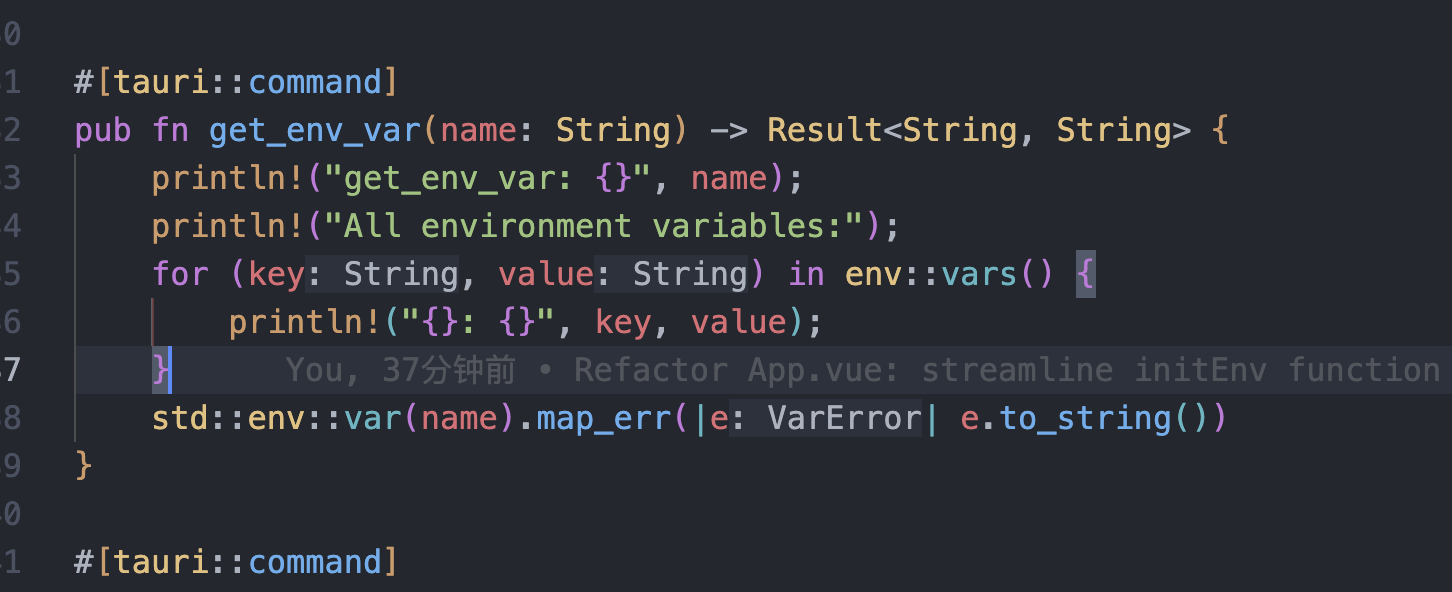
tauri项目,如何在rust端读取电脑环境变量
如果想在前端通过调用来获取环境变量的值,可以通过标准的依赖: std::env::var(name).ok() 想在前端通过调用来获取,可以写一个command函数: #[tauri::command] pub fn get_env_var(name: String) -> Result<String, Stri…...
Python训练营-Day26-函数专题1:函数定义与参数
题目1:计算圆的面积 任务: 编写一个名为 calculate_circle_area 的函数,该函数接收圆的半径 radius 作为参数,并返回圆的面积。圆的面积 π * radius (可以使用 math.pi 作为 π 的值)要求:函数接收一个位置参数 radi…...
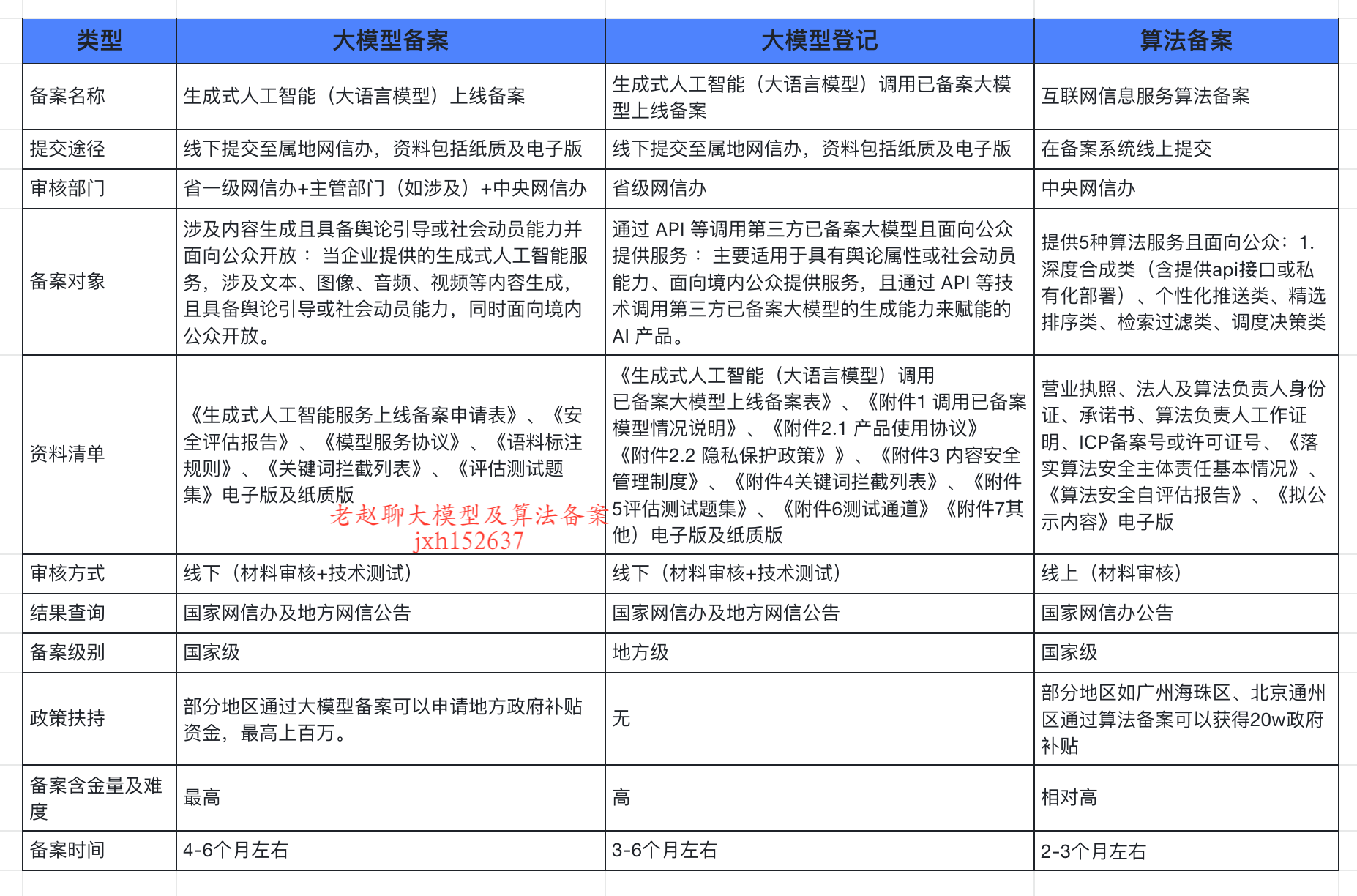
企业大模型服务合规指南:深度解析备案与登记制度
伴随AI技术的爆炸式发展,尤其是大模型(LLM)在各行各业的深度应用和整合,企业利用AI技术提升效率、创新服务的步伐不断加快。无论是像DeepSeek这样的前沿技术提供者,还是积极拥抱AI转型的传统企业,在面向公众…...

DeepSeek越强,Kimi越慌?
被DeepSeek吊打的Kimi,还有多少人在用? 去年,月之暗面创始人杨植麟别提有多风光了。90后清华学霸,国产大模型六小虎之一,手握十几亿美金的融资。旗下的AI助手Kimi烧钱如流水,单月光是投流就花费2个亿。 疯…...

OpenGL-什么是软OpenGL/软渲染/软光栅?
软OpenGL(Software OpenGL)或者软渲染指完全通过CPU模拟实现的OpenGL渲染方式(包括几何处理、光栅化、着色等),不依赖GPU硬件加速。这种模式通常性能较低,但兼容性极强,常用于不支持硬件加速…...

【Ragflow】26.RagflowPlus(v0.4.0):完善解析逻辑/文档撰写模式全新升级
概述 在历经半个月的间歇性开发后,RagflowPlus再次迎来一轮升级,正式发布v0.4.0。 开源地址:https://github.com/zstar1003/ragflow-plus 更新方法 下载仓库最新代码: git clone https://github.com/zstar1003/ragflow-plus.…...