机器学习算法——集成学习
目录
- 1. Bagging
1. Bagging
Bagging(bootstrap aggregating:自举汇聚法)也叫装袋法,其思想是通过将许多相互独立的学习器的结果进行结合,从而提高整体学习器的泛化能力,是一种并行集成学习方法。
工作流程
- 从原始样本集中使用Bootstraping(有放回抽样,这种抽样方法产生的样本子集能很好的反映总体的分布特性)方法抽取n个训练样本,共进行K轮抽取,得到K个训练集(训练集之间相互独立)。
- 对于每个训练集,使用相同的数据学习算法(比如决策树、KNN等)独立训练一个基本模型。
- 将测试样例输入到所有基本模型中,每个模型都给出一个预测值。对于分类问题:通过投票的方式确定分类结果(每个模型只有一票);对于回归问题:计算预测值的均值作为预测结果。
代码实践(Jupyter Notebook实现)
from sklearn import neighbors
from sklearn import datasets
from sklearn.ensemble import BaggingClassifier
from sklearn import tree
from sklearn.model_selection import train_test_split
import numpy as np
import matplotlib.pyplot as plt#------------------------------------------------------------------#
# 使用datasets模块导入鸢尾花数据集,并切分特征值和标签值
# train_test_split(x_data, y_data):将数据集划分为测试集和训练集,
# 默认情况下,训练集占3/4,测试集占1/4
#-----------------------------------------------------------------#
iris = datasets.load_iris()
x_data = iris.data[:,:2]
y_data = iris.target
x_train, x_test, y_train, y_test = train_test_split(x_data, y_data)
# 利用等高线绘制分类边界图
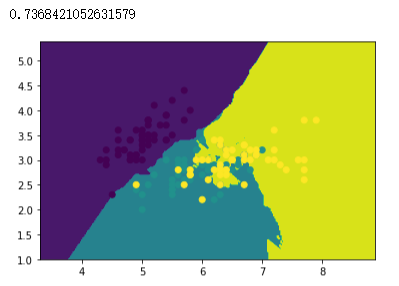
def plot(model):# 获取数据值所在的范围x_min, x_max = x_data[:, 0].min() - 1, x_data[:, 0].max() + 1y_min, y_max = x_data[:, 1].min() - 1, x_data[:, 1].max() + 1# 生成网格矩阵元素xx, yy = np.meshgrid(np.arange(x_min, x_max, 0.02),np.arange(y_min, y_max, 0.02))#-----------------------------------------------------## 预测分类结果# ravel():将多为数据展平为一维数据# np.c_:按列连接两个数组,即拼接成点的坐标的形式# contourf(xx, yy, z):创建填充等高线图,参数需为二维数组#-----------------------------------------------------#z = model.predict(np.c_[xx.ravel(), yy.ravel()])z = z.reshape(xx.shape)cs = plt.contourf(xx, yy, z)
# 创建KNN模型,使用训练集训练模型
knn = neighbors.KNeighborsClassifier()
knn.fit(x_train, y_train)
# 绘制分类边界图
plot(knn)
# 样本散点图
plt.scatter(x_data[:, 0], x_data[:, 1], c=y_data)
# 打印准确率
knn.score(x_test, y_test)
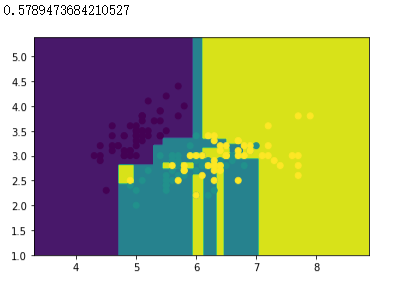
# 创建CART决策树模型,使用训练集训练模型
dtree = tree.DecisionTreeClassifier()
dtree.fit(x_train, y_train)
# 绘制分类边界图
plot(dtree)
# 样本散点图
plt.scatter(x_data[:, 0], x_data[:, 1], c=y_data)
# 打印准确率
dtree.score(x_test, y_test)
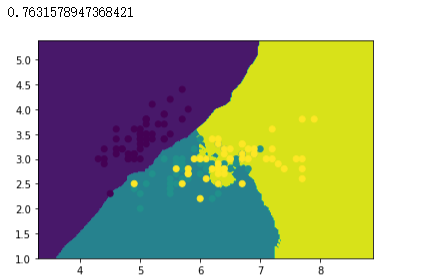
# 创建 Bagging 分类器对象,以KNN分类器作为基分类器,创建100个KNN基分类器
bagging_knn = BaggingClassifier(knn, n_estimators=100)
# 模型拟合
bagging_knn.fit(x_train, y_train)
# 绘制分类边界图
plot(bagging_knn)
# 样本散点图
plt.scatter(x_data[:, 0], x_data[:, 1], c=y_data)
# 打印准确率
bagging_knn.score(x_test, y_test)
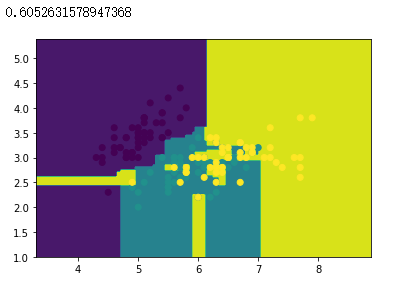
# 创建 Bagging 分类器对象,以CART决策树分类器作为基分类器,创建100个基分类器
bagging_tree = BaggingClassifier(dtree, n_estimators=100)
# 模型拟合
bagging_tree.fit(x_train, y_train)
# 绘制分类边界图
plot(bagging_tree)
# 样本散点图
plt.scatter(x_data[:, 0], x_data[:, 1], c=y_data)
# 打印准确率
bagging_tree.score(x_test, y_test)
准确率汇总
| 算法 | 准确率 |
|---|---|
| KNN | 73.6 8% |
| Bagging(KNN) | 76.32% |
| DecisionTree | 57.89% |
| Bagging(DecisionTree) | 60.53% |
注:由于数据集切分的随机性和Bagging中每个基分类器所使用的训练集不同,因此每次运行的结果可能不同,且Bagging的准确率可能会比单分类器的准确率低。
相关文章:
机器学习算法——集成学习
目录 1. Bagging 1. Bagging Bagging(bootstrap aggregating:自举汇聚法)也叫装袋法,其思想是通过将许多相互独立的学习器的结果进行结合,从而提高整体学习器的泛化能力,是一种并行集成学习方法。 工作流…...
java springboot在当前测试类中添加临时属性 不影响application和其他范围
目前 我们的属性基本都写在 application.yml 里面了 但是 如果 我们只是想做一下临时变量的测试 有没有办法实现呢? 显然是有的 这里 我们还是先在application.yml中去写一个 test属性 下面加个prop 然后 我们尝试在测试类中 获取一下这个属性 直接用 Value 读取…...

原型网络Prototypical Network的python代码逐行解释,新手小白也可学会!!由于工作量大,准备整8个系列完事,-----系列5
文章目录 前言一、原始程序---计算原型,开始训练,计算损失二、每一行代码的详细解释2.1 粗略分析2.2 每一行代码详细分析 前言 承接系列4,此部分属于原型类中的计算原型,开始训练,计算损失函数。 一、原始程序—计算原…...

milvus数据库的数据管理-插入数据
一、插入数据 1.准备数据 数据必须与数据库中定义的字段元数据一致,与集合的模式匹配 import random data [[i for i in range(2000)],[str(i) for i in range(2000)],[i for i in range(10000, 12000)],[[random.random() for _ in range(2)] for _ in range(2…...
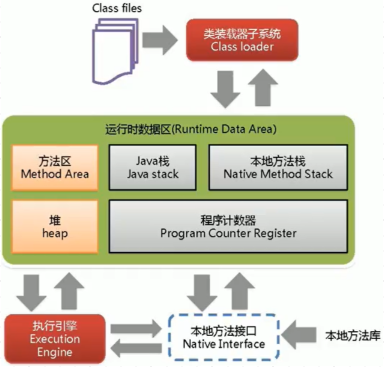
系列一、请谈谈你对JVM的理解?Java8的虚拟机有什么更新?
一、请谈谈你对JVM的理解?Java8的虚拟机有什么更新? JVM是Java虚拟机的意思。它是建立在操作系统之上的,由类加载器子系统、本地方法栈、Java栈、程序计数器、方法区、堆、本地方法库、本地方法接口、执行引擎组成。 (1࿰…...
恕我直言,大模型对齐可能无法解决安全问题,我们都被表象误导了
是否听说过“伪对齐”这一概念? 在大型语言模型(LLM)的评估中,研究者发现了一个引人注目的现象:当面对多项选择题和开放式问题时,模型的表现存在显著差异。这一差异根源在于模型对复杂概念的理解不够全面&…...
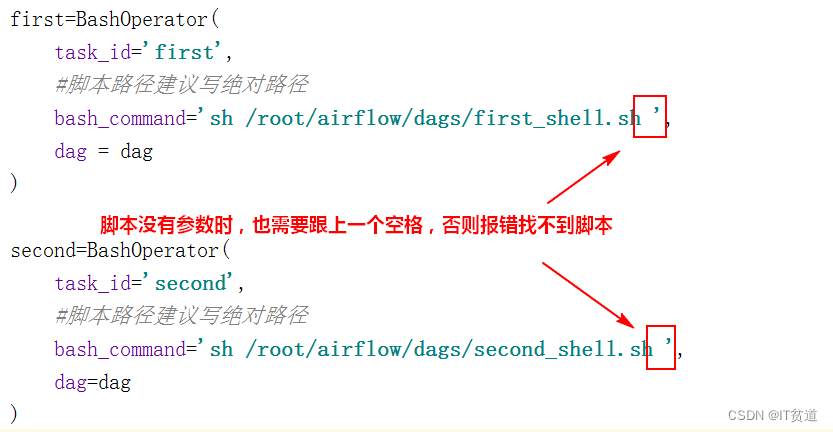
Apache Airflow (九) :Airflow Operators及案例之BashOperator及调度Shell命令及脚本
🏡 个人主页:IT贫道_大数据OLAP体系技术栈,Apache Doris,Clickhouse 技术-CSDN博客 🚩 私聊博主:加入大数据技术讨论群聊,获取更多大数据资料。 🔔 博主个人B栈地址:豹哥教你大数据的个人空间-豹…...
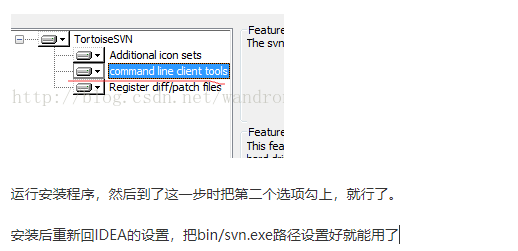
IJ中配置TortoiseSVN插件:
文章目录 一、报错情况:二、配置TortoiseSVN插件: 一、报错情况: 由于公司电脑加密,TortoiseSVN菜单没有提交和更新按钮,所以需要使用IJ的SVN进行代码相关操作 二、配置TortoiseSVN插件: 需要设置一个svn.…...

个人实现在线支付,一种另类的在线支付解决方案
Hi, I’m Shendi 个人实现在线支付,一种另类的在线支付解决方案 个人实现在线支付的方式 对于在线支付,最多的是接入微信与支付宝。但都需要营业执照,不适用于个人。 当然,可以去办理一个个体工商户,但对我这种小额收…...

浅谈智能安全配电装置应用在银行配电系统中
【摘要】银行是国家重点安全保护部分,关系到社会资金的稳定,也是消防重点单位。消防安全是银行工作的重要组成部分。在银行配电系统中应用智能安全配电装置,可以提高银行的智能控制水平,有效预防电气火灾。 【关键词】银行&#…...
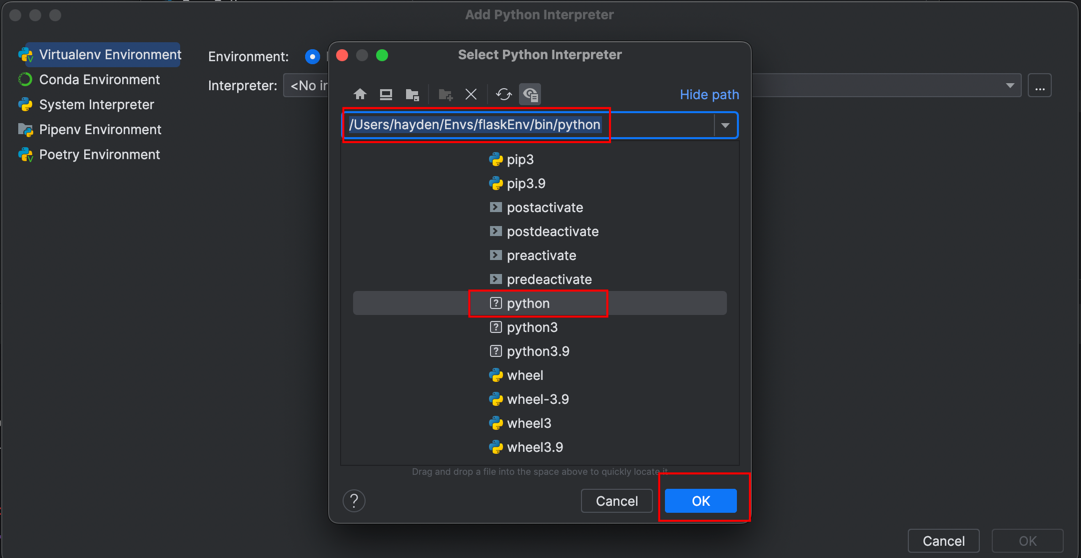
macOS下如何使用Flask进行开发
👨🏻💻 热爱摄影的程序员 👨🏻🎨 喜欢编码的设计师 🧕🏻 擅长设计的剪辑师 🧑🏻🏫 一位高冷无情的编码爱好者 大家好,我是全栈工…...

记一次服务器配置文件获取OSS
一、漏洞原因 由于网站登录口未做双因子校验,导致可以通过暴力破解获取管理员账号,成功进入系统;未对上传的格式和内容进行校验,可以任意文件上传获取服务器权限;由于服务器上配置信息,可以进一步获取数据库权限和OSS管理权限。二、漏洞成果 弱口令获取网站的管理员权限通…...

合众汽车选用风河Wind River Linux系统
导读合众新能源汽车股份有限公司近日选择了Wind River Linux 用于开发合众智能安全汽车平台。 合众智能安全汽车平台(Hozon Automo-tive Intelligent Security Vehicle Plat-form)是一个面向高性能服务网关及车辆控制调度的硬件与软件框架,将于2024年中开始投入量产…...
)
PTA平台-2023年软件设计综合实践_5(指针及引用)
第一题 6-1 调和平均 - C/C 指针及引用 函数hmean()用于计算整数x和y的调和平均数,结果应保存在指针r所指向的浮点数对象中。当xy等于0时,函数返回0表示无法计算,否则返回1。数学上,两个数x和y的调和平均数 z 2xy/(xy) 。 直接…...

智慧卫生间
智慧卫生间 获取ApiKey/SecretKey获取Access_token获取卫生间实时数据返回说明 获取ApiKey/SecretKey ApiKey/SecretKey采用 线下获取的方式,手动分配。 获取Access_token 向授权服务地址http://xxxxxx:12345/token(示意)发送post请求,并在data中带上…...
Cadence virtuoso drc lvs pex 无法输入
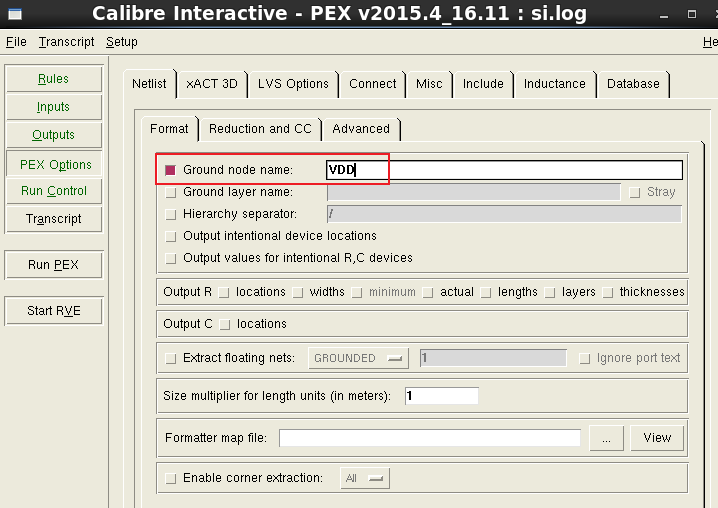
问题描述:在PEX中的PEX options中 Ground node name 无法输入内容。 在save runset的时候也出现无法输入名称的情况 解决办法: copy一个.bashrc文件到自己的工作目录下 打开.bashrc文件 在.bashrc中加一行代码:unset XMODIFIERS 在终端sour…...
, 分析调用链, 编写POC)
反序列化漏洞(2), 分析调用链, 编写POC
反序列化漏洞(2), 反序列化调用链分析 一, 编写php漏洞脚本 http://192.168.112.200/security/unserial/ustest.php <?php class Tiger{public $string;protected $var;public function __toString(){return $this->string;}public function boss($value){eval($valu…...

Pytorch reshape用法
这里-1是指未设定行数,程序自动计算,所以这里-1表示任一正整数 example reshape(-1, 1) 表示(任意行,1列),4行4列变为16行1列reshape(1, -1) 表示(1行,任意列)…...

Latex 辅助写作工具
语法修改 https://app.grammarly.com/润色 文心一言、ChatGPTlatex 编辑公式 https://www.latexlive.comlatex 编辑表格 https://www.tablesgenerator.comlatex 图片转公式 https://www.tablesgenerator.com...

frp新版本frp_0.52.3设置
服务端 frps.toml cp /root/frp/frpc /usr/bin #bindPort 7000 bindPort 7000# 如果指定了“oidc”,将使用 OIDC 设置颁发 OIDC(开放 ID 连接)令牌。默认情况下,此值为“令牌”。auth.method “token” auth.method "…...
结构体的进阶应用)
基于算法竞赛的c++编程(28)结构体的进阶应用
结构体的嵌套与复杂数据组织 在C中,结构体可以嵌套使用,形成更复杂的数据结构。例如,可以通过嵌套结构体描述多层级数据关系: struct Address {string city;string street;int zipCode; };struct Employee {string name;int id;…...

浅谈 React Hooks
React Hooks 是 React 16.8 引入的一组 API,用于在函数组件中使用 state 和其他 React 特性(例如生命周期方法、context 等)。Hooks 通过简洁的函数接口,解决了状态与 UI 的高度解耦,通过函数式编程范式实现更灵活 Rea…...

[2025CVPR]DeepVideo-R1:基于难度感知回归GRPO的视频强化微调框架详解
突破视频大语言模型推理瓶颈,在多个视频基准上实现SOTA性能 一、核心问题与创新亮点 1.1 GRPO在视频任务中的两大挑战 安全措施依赖问题 GRPO使用min和clip函数限制策略更新幅度,导致: 梯度抑制:当新旧策略差异过大时梯度消失收敛困难:策略无法充分优化# 传统GRPO的梯…...
Debian系统简介
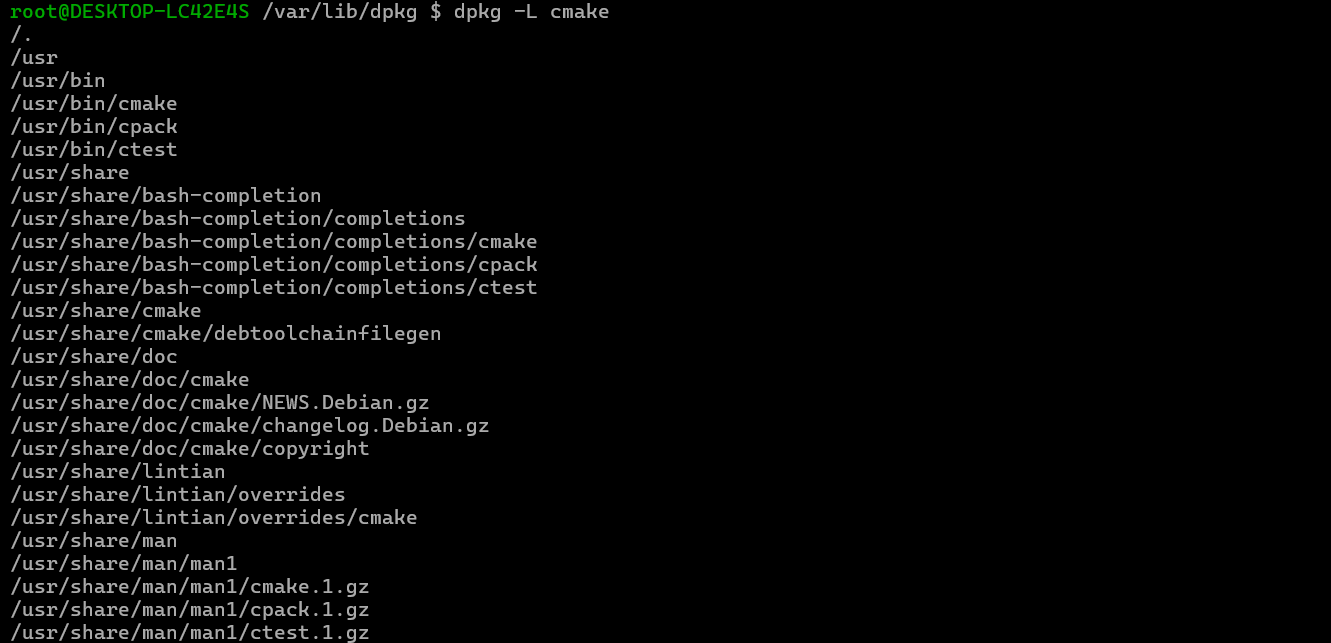
目录 Debian系统介绍 Debian版本介绍 Debian软件源介绍 软件包管理工具dpkg dpkg核心指令详解 安装软件包 卸载软件包 查询软件包状态 验证软件包完整性 手动处理依赖关系 dpkg vs apt Debian系统介绍 Debian 和 Ubuntu 都是基于 Debian内核 的 Linux 发行版ÿ…...

在rocky linux 9.5上在线安装 docker
前面是指南,后面是日志 sudo dnf config-manager --add-repo https://download.docker.com/linux/centos/docker-ce.repo sudo dnf install docker-ce docker-ce-cli containerd.io -y docker version sudo systemctl start docker sudo systemctl status docker …...

AtCoder 第409场初级竞赛 A~E题解
A Conflict 【题目链接】 原题链接:A - Conflict 【考点】 枚举 【题目大意】 找到是否有两人都想要的物品。 【解析】 遍历两端字符串,只有在同时为 o 时输出 Yes 并结束程序,否则输出 No。 【难度】 GESP三级 【代码参考】 #i…...
【机器视觉】单目测距——运动结构恢复
ps:图是随便找的,为了凑个封面 前言 在前面对光流法进行进一步改进,希望将2D光流推广至3D场景流时,发现2D转3D过程中存在尺度歧义问题,需要补全摄像头拍摄图像中缺失的深度信息,否则解空间不收敛…...

《用户共鸣指数(E)驱动品牌大模型种草:如何抢占大模型搜索结果情感高地》
在注意力分散、内容高度同质化的时代,情感连接已成为品牌破圈的关键通道。我们在服务大量品牌客户的过程中发现,消费者对内容的“有感”程度,正日益成为影响品牌传播效率与转化率的核心变量。在生成式AI驱动的内容生成与推荐环境中࿰…...

渲染学进阶内容——模型
最近在写模组的时候发现渲染器里面离不开模型的定义,在渲染的第二篇文章中简单的讲解了一下关于模型部分的内容,其实不管是方块还是方块实体,都离不开模型的内容 🧱 一、CubeListBuilder 功能解析 CubeListBuilder 是 Minecraft Java 版模型系统的核心构建器,用于动态创…...

【ROS】Nav2源码之nav2_behavior_tree-行为树节点列表
1、行为树节点分类 在 Nav2(Navigation2)的行为树框架中,行为树节点插件按照功能分为 Action(动作节点)、Condition(条件节点)、Control(控制节点) 和 Decorator(装饰节点) 四类。 1.1 动作节点 Action 执行具体的机器人操作或任务,直接与硬件、传感器或外部系统…...