实例10:四足机器人运动学逆解可视化与实践
实例10: 四足机器人运动学逆解单腿可视化
实验目的
- 了解逆运动学的有无解、有无多解情况。
- 了解运动学逆解的求解。
- 熟悉逆运动学中求解的几何法和代数法。
- 熟悉单腿舵机的简单校准。
- 掌握可视化逆向运动学计算结果的方法。
实验要求
- 拼装一条mini pupper的腿部。
- 运行程序,可视化观察运动学逆解的多解情况和求解方法。
- 对单腿舵机进行简单校准。
- 观察运动学逆解的硬件运行情况。
实验知识
1.什么是逆向运动学 Inverse Kinematics
正向运动学探究的是已知关节角θi\theta_iθi,求解工具坐标系{H}\{H\}{H}或WorldP^{World}PWorldP的问题。
而逆向运动学则是探究已知工具坐标系{H}\{H\}{H}的位置和姿态或WorldP^{World}PWorldP,求解满足要求的θi\theta_iθi的问题。
运动学方程解的有无定义了工作空间,有解则表示机械臂能到达这个目标点,无解则表示机械臂无法到达这个点,这个目标点位于工作空间之外。
基本的逆运动学可以看做是给定操作臂末端执行器的位置和姿态,计算所有可达给定位置和姿态的关节角的问题,可以认为是机器人位姿从笛卡尔空间到关节空间的“定位”映射。
2.什么是封闭解和数值解
逆运动学不像正运动学那么容易,逆运动学是非线性的,难以找到封闭解,有时候无解,有时候有有多解的问题,这种非线性的超越方程组,没有规矩的、统一、通用的解法,解法分为封闭解法和数值解法。
封闭解是由数学公式的推导得出,对于任意自变量均能求出对应的因变量,计算量可能相对较多,精度高。
数值解则是可以由离散查表或者是插值一类的方法去模拟最终情况,计算量相对较小,精度相对较差。
因此,我们需要根据实际情况来考虑逆向运动学的解和解的情况。
2.解存在吗?
在逆向运动学(IK)中,我们可以通过给定点相对于世界坐标系(Frame World)的坐标来解算出机器人的手臂关节应该旋转的角度θ\thetaθ。
假如给定的一个位置是在很远的地方,机器人的手臂完全够不着,那么求解是没有意义的,因此我们将会用到工作空间来描述机器人可触达的区域。
工作空间
工作空间是手臂末端所能到达的位置范围。指定的目标点必须在工作空间内,逆向运动学求解才有意义。
为了进一步描述工作空间,可以用以下常见的这两种工作空间的表示:
可达工作空间 Reachable workspace
是手臂能用一种或以上的姿态能够到达的位置范围。可达目标坐标系可以描述这个Frame相对于世界坐标系的位置,而一系列的可达目标坐标系的集合构成了可达工作空间。
灵巧工作空间 Dexterous workspace
是手臂末端用任何姿态都能够到达的位置,条件相当苛刻,比如平面2DOFs的RR机械臂模型中L1=L2的摆臂的圆心,在这个模型中,仅此一点是灵巧工作空间。灵巧工作空间是可达工作空间的子集。
3.是否有多个解?
在求解运动学方程时常常会遇到不只一个解的情况。比如平面中具有三个旋转关节的机器人手臂,对于同一个点PPP,这三个旋转关节可以有不同的位形,在不同的位型下,手臂末端的执行器的可达位置和姿态可以是相同的。
图片:三连杆操作臂多解图
解的选取
对于解的选取有一些基本原则:
- 速度最快
- 能耗最低
- 避开障碍物
- 在关节允许活动的范围限制内
4.如何求解?
求解操作臂运动学方程是非线性的问题,非线性方程组没有通用的求解算法,算法需要针对机器人手臂的模型来制定。如果某一算法可以解出与已知位姿相关的全部关节变量,那么这个机器人手臂就是可解的。
从Frameobject{Frame_{object}}Frameobject到FrameWorld{Frame_{World}}FrameWorld的变换矩阵oWT^W_oToWT中的转动部分和平移部分可以提取出含未知数的16个数字。
其中的旋转矩阵被xyz相互垂直、xyz为单位向量这六个条件限制到只有三个自由度,其中的位置矢量分量的三个方程有三个自由度,共有6个限制条件,6个自由度,这些方程为非线性超越方程,求解不易。
对于六旋转关节的机械臂,存在解析解(封闭解)的充分条件是相邻的三关节的转轴交于一点。
60T=[60R3x30P6ORG3x10001]4x4=[X^6⋅X^0Y^6⋅X^0Z^6⋅X^060PXorgX^6⋅Y^0Y^6⋅Y^0Z^6⋅Y^060PYorgX^6⋅Z^0Y^6⋅Z^0Z^6⋅Z^060PZorg0001]^0_6T = \left[ \begin{matrix} ^0_6R_{3x3} &^0P_{6{\kern 2pt}ORG{\kern 2pt}3x1}\\ 0{\kern 3pt}0{\kern 3pt}0&1 \end{matrix} \right]_{4x4}= \left[ \begin{matrix} \hat X_6\cdot \hat X_0& \hat Y_6\cdot \hat X_0 & \hat Z_6\cdot \hat X_0 & ^0_6P_{Xorg}\\ \hat X_6\cdot \hat Y_0& \hat Y_6\cdot \hat Y_0&\hat Z_6\cdot \hat Y_0 &^0_6P_{Yorg}\\ \hat X_6\cdot \hat Z_0& \hat Y_6\cdot \hat Z_0&\hat Z_6\cdot \hat Z_0 &^0_6P_{Zorg}\\ 0&0&0&1 \end{matrix} \right] 60T=[60R3x30000P6ORG3x11]4x4=X^6⋅X^0X^6⋅Y^0X^6⋅Z^00Y^6⋅X^0Y^6⋅Y^0Y^6⋅Z^00Z^6⋅X^0Z^6⋅Y^0Z^6⋅Z^0060PXorg60PYorg60PZorg1
对于基于解析形式的解法,常见的求解方法有几何法和代数法。两种方法相似,求解过程不同。
几何法
几何法求解机械臂的逆运动学问题时,常常需要将空间几何参数转化为平面几何的问题。在αi=0或−+90°\alpha_i=0 或 ^+_-90°αi=0或−+90°时几何法会非常容易,应用平面几何常见的公式及角度转换即可求出θi\theta_iθi的值。
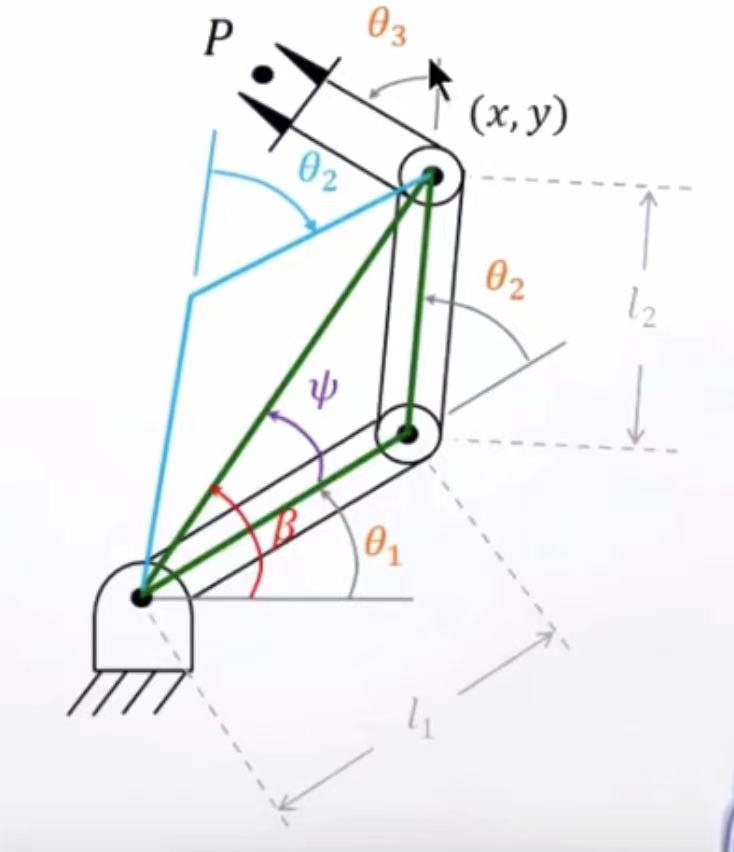
x2+y2=l12+l22−2l1l2(π−θ2)(余弦定理)x^2+y^2=l^2_1+l^2_2-2l_1l_2(\pi-\theta_2) \tag{余弦定理} x2+y2=l12+l22−2l1l2(π−θ2)(余弦定理)
Cosθ2=x2+y2−l12−l222l1l2(变形1)Cos\theta_2={x^2+y^2-l^2_1-l^2_2\over 2l_1l_2} \tag{变形1} Cosθ2=2l1l2x2+y2−l12−l22(变形1)
Cosψ=(x2+y2)+l12−l222l1x2+y2(变形2)Cos\psi={(x^2+y^2)+l^2_1-l^2_2\over 2l_1\sqrt{x^2+y^2}} \tag{变形2} Cosψ=2l1x2+y2(x2+y2)+l12−l22(变形2)
θ1={atan2(y,x)+ψθ2<0atan2(y,x)−ψθ2>0\theta_1= \begin{cases} atan2(y,x)+\psi& \theta_2<0\\ atan2(y,x)-\psi& \theta_2>0\\ \end{cases} θ1={atan2(y,x)+ψatan2(y,x)−ψθ2<0θ2>0
在计算完θ2\theta_2θ2和θ1\theta_1θ1后,根据图的几何角度关系,又可算得θ3\theta_3θ3,即成功反解运动学的各θn\theta_nθn
math.atan2()方法
math.atan2()方法是双变量反正切公式,可以计算给定y,x值的反正切值,也就是以弧度形式表达的该段终点与起点连线斜率线的一个角度值。
atan2()优于atan(),因为可以计算x2-x1=0的情况。
参考链接:Python math.atan2(y,x)
计算空间中缺少的自由度
代数法
应用连杆参数(αi−1\alpha_{i-1}αi−1,ai−1a_{i-1}ai−1,θi\theta_{i}θi,did_{i}di),通过运动学正解(FK)可以求得机械臂的运动学方程,表现形式为变换矩阵30T^0_3T30T。因此,目标点的位置是由手臂末端坐标系相对基坐标系来定的,当研究对象为平面机械臂时,只需要知道x,y,ϕ\phiϕ即可确定目标点位置。
ϕ\phiϕ是 末端杆在平面内的姿态角
将已知的30T^0_3T30T与新建立的objectworldT^{world}_{object}TobjectworldT取等,即可获得对应位置的值相等。
[c123−s1230.0l1c1+l2c12s123c1230.0l1s1+l2s120.00.01.00.00001]=[cϕ−sϕ0.0xsϕcϕ0.0y0.00.01.00.00001]\left[ \begin{matrix} c_{123} & -s_{123} & 0.0&l_1c_1+l_2c_{12} \\ s_{123} & c_{123} & 0.0&l_1s_1+l_2s_{12} \\ 0.0 & 0.0 & 1.0 &0.0 \\ 0 & 0 & 0 &1 \\ \end{matrix} \right]= \left[ \begin{matrix} c_{\phi} & -s_{\phi} & 0.0&x \\ s_{\phi} & c_{\phi} & 0.0&y \\ 0.0 & 0.0 & 1.0 &0.0 \\ 0 & 0 & 0 &1 \\ \end{matrix} \right] c123s1230.00−s123c1230.000.00.01.00l1c1+l2c12l1s1+l2s120.01=cϕsϕ0.00−sϕcϕ0.000.00.01.00xy0.01
利用三角函数和角公式
Sin1−+2=Sin1Cos2−+Cos1Sin2Sin_{1 {^+_-}2}=Sin_1Cos_2 {^+_-} Cos_1Sin_2 Sin1−+2=Sin1Cos2−+Cos1Sin2
Cos1−+2=Cos1Cos2+−Sin1Sin2Cos_{1 {^+_-}2}=Cos_1Cos_2 {^-_+}Sin_1Sin_2 Cos1−+2=Cos1Cos2+−Sin1Sin2
可得
Cosθ2=x2+y2−l12−l222l1l2Cos\theta_2={x^2+y^2-l^2_1-l^2_2\over 2l_1l_2} Cosθ2=2l1l2x2+y2−l12−l22
此式在1≥Cosθ2≥−11\geq Cos\theta_2\geq-11≥Cosθ2≥−1时有解
假设目标点在工作空间内,又有
Sinθ2=−+1−c2Sin\theta_2= {^+_-}\sqrt {1-c^2} Sinθ2=−+1−c2
应用几何法中提到的math.Atan2()求解θ2\theta_2θ2,利用θ2\theta_2θ2再去对其他θn\theta_nθn求解,具体方法参考教材,本处仅作代数法引入。
通俗的来说,就是确认θn\theta_nθn的SinθnSin\theta_nSinθn和CosθnCos\theta_nCosθn,再利用双变量反正切公式math.Atan2()求θn\theta_nθn
实验步骤
1.逆运动学的多解与求解
运行程序,观察运动学逆解的多解情况,观察程序中运动学逆解的求解方法。
sudo python rr_IK.py
# 示例值: 3 7
#!/usr/bin/python
# coding:utf-8
# rr_IK.py
# 逆向运动学IK
# mini pupper的简化单腿,可视作同一平面的RR类机械臂,可视化该机械臂,由给定末端位置计算转轴角度
import matplotlib.pyplot as plt # 引入matplotlib
import numpy as np # 引入numpy
from math import degrees, radians, sin, cos# 几何法:端点坐标转关节角
def position_2_theta(x, y, l1, l2):"""运动学逆解 将输入的端点坐标转化为对应的关节角:param x: p点坐标x值:param y: p点坐标y值:param l1: 大臂长:param l2: 小臂长:return: 关节角1值1 关节角1值2 关节角2值1 关节角2值1"""cos2 = (x ** 2 + y ** 2 - l1 ** 2 - l2 ** 2) / (2 * l1 * l2)# print(cos2)sin2_1 = np.sqrt(1 - cos2 ** 2)sin2_2 = -sin2_1# print(sin2_1)# print("sin2有两值,分别为sin2_1=%f, sin2_2=%f" % (sin2_1, sin2_2)) # 若考虑关节情况也可只取一个正值theta2_1 = np.arctan2(sin2_1, cos2)theta2_2 = np.arctan2(sin2_2, cos2)phi_1 = np.arctan2(l2 * sin2_1, l1 + l2 * cos2)phi_2 = np.arctan2(l2 * sin2_2, l1 + l2 * cos2)theta1_1 = np.arctan2(y, x) - phi_1theta1_2 = np.arctan2(y, x) - phi_2# print(degrees(theta1_1), degrees(theta1_2), degrees(theta2_1), degrees(theta2_2))return theta1_1, theta1_2, theta2_1, theta2_2def preprocess_drawing_data(theta1, theta2, l1, l2):"""处理角度数据,转化为matplotlib适应的绘图格式:param theta1: 角度数据1:param theta2: 角度数据2:param l1: 杆件长1:param l2: 杆件长2:return: 绘图数据x坐标list和对应的y坐标list"""xs = [0]ys = [0]# 分别算出x1 y1和x2 y2x1 = l1 * cos(theta1)y1 = l1 * sin(theta1)x2 = x1 + l2 * cos(theta1 + theta2)y2 = y1 + l2 * sin(theta1 + theta2)xs.append(x1)xs.append(x2)ys.append(y1)ys.append(y2)return xs, ysdef annotate_angle(x0, y0, rad1, rad2, name, inverse=False):"""为两条直线绘制角度:param x0: 圆心x坐标:param y0: 圆心x坐标:param rad1: 起始角:param rad2: 终止角:param name: 角名:param inverse: 用于解决点1的重叠问题:return: 无"""theta = np.linspace(rad1, rad2, 100) # 0~radr = 0.2 # circle radiusx1 = r * np.cos(theta) + x0y1 = r * np.sin(theta) + y0plt.plot(x1, y1, color='red')plt.scatter(x0, y0, color='blue')degree = degrees((rad2 - rad1))if inverse:plt.annotate("%s=%.1f°" % (name, degree), [x0, y0], [x0 - r / 1.5, y0 - r / 1.5])else:plt.annotate("%s=%.1f°" % (name, degree), [x0, y0], [x0 + r / 1.5, y0 + r / 1.5])# 关节信息
# 大臂长度:5 cm 小臂长度:7.5 cm
link_length = [5, 7.5] # in cm
# 输入末端位置
position_pre = input("请输入末端的x坐标和y坐标,以空格隔开:")
position = [float(n) for n in position_pre.split()]
print(position)# 计算并预处理绘图数据
joints_angles = position_2_theta(position[0], position[1], link_length[0], link_length[1])
# print(joints_angles)
figure1 = preprocess_drawing_data(joints_angles[0], joints_angles[2], link_length[0], link_length[1])
figure2 = preprocess_drawing_data(joints_angles[1], joints_angles[3], link_length[0], link_length[1])
# print(figure1)
# print(figure2)# 绘图
fig, ax = plt.subplots() # 建立图像
plt.axis("equal")
ax.grid()
plt.plot(figure1[0], figure1[1], color='black', label='method 1')
plt.scatter(figure1[0], figure1[1], color='black')
plt.plot(figure2[0], figure2[1], color='red', label='method 2')
plt.scatter(figure2[0], figure2[1], color='blue')
ax.set(xlabel='X', ylabel='Y', title='mini pupper IK RR model')
plt.legend()
# 标注
annotate_angle(figure1[0][0], figure1[1][0], 0, joints_angles[0], "theta1_1")
annotate_angle(figure1[0][1], figure1[1][1], joints_angles[0], joints_angles[2]+joints_angles[0], "theta2_1")
annotate_angle(figure2[0][0], figure2[1][0], 0, joints_angles[1], "theta1_2", inverse=True)
annotate_angle(figure2[0][1], figure2[1][1], joints_angles[1], joints_angles[3]+joints_angles[1], "theta2_2")
plt.annotate("P(%d, %d)" % (position[0], position[1]), [figure1[0][2], figure1[1][2]],[figure1[0][2] + 0.1, figure1[1][2] + 0.1])
plt.tight_layout()
plt.show()2.逆运动学可视化
观察程序,通过圆轨迹的运动学逆解来观察mini pupper腿部的运动
#!/usr/bin/python
# coding:utf-8
# rr_IK_circle.py
# 逆向运动学IK
# mini pupper的简化单腿,可视作同一平面的RR类机械臂,可视化四足机器人逆运动学画圈
import matplotlib.pyplot as plt # 引入matplotlib
import numpy as np # 引入numpy
from math import degrees, radians, sin, cos
import matplotlib.animation as animation# 几何法:端点坐标转关节角
def position_2_theta(x, y, l1, l2):"""运动学逆解 将输入的端点坐标转化为对应的关节角:param x: p点坐标x值:param y: p点坐标y值:param l1: 大臂长:param l2: 小臂长:return: 关节角1值1 关节角1值2 关节角2值1 关节角2值1"""cos2 = (x ** 2 + y ** 2 - l1 ** 2 - l2 ** 2) / (2 * l1 * l2)sin2_1 = np.sqrt(1 - cos2 ** 2)sin2_2 = -sin2_1theta2_1 = np.arctan2(sin2_1, cos2)theta2_2 = np.arctan2(sin2_2, cos2)phi_1 = np.arctan2(l2 * sin2_1, l1 + l2 * cos2)phi_2 = np.arctan2(l2 * sin2_2, l1 + l2 * cos2)theta1_1 = np.arctan2(y, x) - phi_1theta1_2 = np.arctan2(y, x) - phi_2return theta1_1, theta1_2, theta2_1, theta2_2def preprocess_drawing_data(theta1, theta2, l1, l2):"""处理角度数据,转化为matplotlib适应的绘图格式:param theta1: 角度数据1:param theta2: 角度数据2:param l1: 杆件长1:param l2: 杆件长2:return: 绘图数据x坐标list和对应的y坐标list"""xs = [0]ys = [0]# 分别算出x1 y1和x2 y2x1 = l1 * cos(theta1)y1 = l1 * sin(theta1)x2 = x1 + l2 * cos(theta1 + theta2)y2 = y1 + l2 * sin(theta1 + theta2)xs.append(x1)xs.append(x2)ys.append(y1)ys.append(y2)return xs, ysdef animate_plot(n):# 生成圆轨迹circle_point = [2.696152422706633, -7.330127018922193] # 圆周运动的圆心position = [0, 0]history_position_x = [0]history_position_y = [0]circle_r = 2theta = n * np.pi / 100position[0] = circle_point[0] + circle_r * np.cos(theta)position[1] = circle_point[1] + circle_r * np.sin(theta)# 计算并预处理绘图数据joints_angles = position_2_theta(position[0], position[1], link_length[0], link_length[1])figure1 = preprocess_drawing_data(joints_angles[0], joints_angles[2], link_length[0], link_length[1])# 轨迹追踪for i in range(0, (n % 200)+1):history_theta = ((n % 200) + 1 - i) * np.pi / 100history_position_x.append(circle_point[0] + circle_r * np.cos(history_theta))history_position_y.append(circle_point[1] + circle_r * np.sin(history_theta))# 画图p = plt.plot(figure1[0], figure1[1], 'o-', lw=2, color='black')p += plt.plot(history_position_x, history_position_y, '--', color='blue', lw=1)return p# 关节信息
# 大臂长度:5 cm 小臂长度:7.5 cm
link_length = [5, 7.5] # in cm# matplotlib可视化部分
fig, ax = plt.subplots() # 建立图像
plt.axis("equal")
plt.grid()
ax.set(xlabel='X', ylabel='Y', title='mini pupper IK RR model Circle Plot')
ani = animation.FuncAnimation(fig, animate_plot, interval=10, blit=True)
plt.show()3.校准舵机
将组装好的单腿各舵机线材,按照程序中提示的接线接入,对舵机2与舵机3进行回零校准。
#!/usr/bin/python
# coding:utf-8
# servo_calibrate.py
# 默认舵机全部回零,随后等待输入角度import RPi.GPIO as GPIO
import timedef servo_map(before_value, before_range_min, before_range_max, after_range_min, after_range_max):"""功能:将某个范围的值映射为另一个范围的值参数:原范围某值,原范围最小值,原范围最大值,变换后范围最小值,变换后范围最大值返回:变换后范围对应某值"""percent = (before_value - before_range_min) / (before_range_max - before_range_min)after_value = after_range_min + percent * (after_range_max - after_range_min)return after_valuesignal_ports = input("键入各舵机的信号端口号,以空格隔开,无输入按回车默认信号口为:32 33 35\n请输入:") or "32 33 35"
signal_ports = [int(n) for n in signal_ports.split()]
for i in range(0, len(signal_ports)):print("舵机%d对应的口为%d" % (i+1, signal_ports[i]))GPIO.setmode(GPIO.BOARD) # 初始化GPIO引脚编码方式
servo = [0, 0, 0]
servo_SIG = signal_ports # PWM信号端
servo_VCC = [2, 4, 1] # VCC端
servo_GND = [30, 34, 39] # GND端
servo_freq = 50 # PWM频率
servo_width_min = 2.5 # 工作脉宽最小值
servo_width_max = 12.5 # 工作脉宽最大值
GPIO.setmode(GPIO.BOARD) # 初始化GPIO引脚编码方式
for i in range(0, len(servo_SIG)):GPIO.setup(servo_SIG[i], GPIO.OUT)servo[i] = GPIO.PWM(servo_SIG[i], servo_freq)servo[i].start(0)servo[i].ChangeDutyCycle((servo_width_min + servo_width_max) / 2) # 回归舵机中位
print("初始化回零完成,两秒后等待输入")
time.sleep(2)# 为舵机指定位置
try: # try和except为固定搭配,用于捕捉执行过程中,用户是否按下ctrl+C终止程序while 1:angles = input("如果你需要改变舵机角度,请依次为不同舵机输入0°-180°的角度值:\n")angles = [int(n) for n in angles.split()]for i in range(0, len(angles)):dc_trans = servo_map(angles[i], 0, 180, servo_width_min, servo_width_max)servo[i].ChangeDutyCycle(dc_trans)print("舵机%d已转动到%d°" % (i+1, angles[i]))
except KeyboardInterrupt:pass
for i in range(0, len(servo_SIG)):servo[i].stop() # 停止pwm
GPIO.cleanup() # 清理GPIO引脚4.观察运动学逆解的实际运行
运动学逆解的实际运行会受到非常多因素的干扰,例如校准情况、杆间的测量误差、信号线材的传输波动、树莓派本身的计算能力。
值得一提的是,千机千面,舵机的校准每个人遇到的情况不同,对于单腿的舵机,在3中提到的校准程序只能帮助你发现简单的安装错误,如果需要实际校准,需要运行整机的可视化校准代码。
如果你希望可视化硬件的运行情况,虽然mini pupper并没有设置足端反馈,但你也可以将代码中的绘图部分注释恢复,这会使得舵机运动和电脑端绘图同步进行,这对算力要求较高,可能会出现卡顿。
#!/usr/bin/python
# coding:utf-8
# rr_IK_circle_synchronous.py
# 运动学逆解画圆,同步控制端图像显示和硬件运动
import matplotlib.pyplot as plt # 引入matplotlib
import numpy as np # 引入numpy
from math import degrees, radians, sin, cos
import matplotlib.animation as animation
import time
import RPi.GPIO as GPIO# 几何法:端点坐标转关节角
def position_2_theta(x, y, l1, l2):"""运动学逆解 将输入的端点坐标转化为对应的关节角:param x: p点坐标x值:param y: p点坐标y值:param l1: 大臂长:param l2: 小臂长:return: 关节角1值1 关节角1值2 关节角2值1 关节角2值1"""cos2 = (x ** 2 + y ** 2 - l1 ** 2 - l2 ** 2) / (2 * l1 * l2)sin2_1 = np.sqrt(1 - cos2 ** 2)sin2_2 = -sin2_1theta2_1 = np.arctan2(sin2_1, cos2)theta2_2 = np.arctan2(sin2_2, cos2)phi_1 = np.arctan2(l2 * sin2_1, l1 + l2 * cos2)phi_2 = np.arctan2(l2 * sin2_2, l1 + l2 * cos2)theta1_1 = np.arctan2(y, x) - phi_1theta1_2 = np.arctan2(y, x) - phi_2return theta1_1, theta1_2, theta2_1, theta2_2def servo_map(before_value, before_range_min, before_range_max, after_range_min, after_range_max):"""功能:将某个范围的值映射为另一个范围的值参数:原范围某值,原范围最小值,原范围最大值,变换后范围最小值,变换后范围最大值返回:变换后范围对应某值"""percent = (before_value - before_range_min) / (before_range_max - before_range_min)after_value = after_range_min + percent * (after_range_max - after_range_min)return after_valuedef theta_to_servo_degree(theta, servo_number, relation_list, config_calibration_value=None):"""将杆件的角度转化为舵机角度:param theta: 弧度制 杆件角度:param servo_number: 舵机号:param relation_list: 舵机关系映射表:param config_calibration_value::return:舵机角 in 角度制"""if config_calibration_value is None:config_calibration_value = [0, 0, 0]theta = degrees(theta)servo_degree = 0if servo_number == 1:print("servo1")servo_degree = 0 # 此处需要根据舵机1修改elif servo_number == 2:print("servo2")servo_degree = theta + relation_list[1]+config_calibration_value[1]elif servo_number == 3:print("servo3")servo_degree = theta + relation_list[2]+config_calibration_value[2]else:print("ERROR:theta_to_servo_degree")servo_degree = 0return servo_degreedef servo_control(servo_number, degree):"""通过角度值控制电机输出对应的角度:return:"""dc_trans = servo_map(degree, 0, 180, servo_width_min, servo_width_max)servo[servo_number-1].ChangeDutyCycle(dc_trans)print("舵机%d已转动到%d°处" % (servo_number, degree))def circle_point_generate(center_point, radius, count):"""输入圆心[x0,y0],半径r,及计数c,返还圆周上单个点的坐标[x,y]count范围:0~360:param center_point: 圆心[x0,y0]:param radius: 半径:param count: 计数 范围:0~360:return: 圆周上单个点的坐标[x,y]"""theta = (count%360)/360 * 2 * np.piposition = [0, 0]position[0] = center_point[0] + radius * np.cos(theta)position[1] = center_point[1] + radius * np.sin(theta)return positiondef preprocess_drawing_data(theta1, theta2, l1, l2):"""处理角度数据,转化为matplotlib适应的绘图格式:param theta1: 角度数据1:param theta2: 角度数据2:param l1: 杆件长1:param l2: 杆件长2:return: 绘图数据x坐标list和对应的y坐标list"""xs = [0]ys = [0]# 分别算出x1 y1和x2 y2x1 = l1 * cos(theta1)y1 = l1 * sin(theta1)x2 = x1 + l2 * cos(theta1 + theta2)y2 = y1 + l2 * sin(theta1 + theta2)xs.append(x1)xs.append(x2)ys.append(y1)ys.append(y2)return xs, ysdef animate_plot(n):# 圆轨迹生成position = circle_point_generate(center_point, radius, n)# 运动学逆解joints_angles = position_2_theta(position[0], position[1], link_length[0], link_length[1])# 逆解值转绘图数据figure1 = preprocess_drawing_data(joints_angles[0], joints_angles[2], link_length[0], link_length[1])# 杆件角度转舵机角度servo_degree[0] = theta_to_servo_degree(joints_angles[0], 2, config_degree_relation_list)servo_degree[1] = theta_to_servo_degree(joints_angles[2], 3, config_degree_relation_list)# 硬件舵机运动同步servo_control(1, servo_degree[0])servo_control(2, servo_degree[1])# # 画图# p = plt.plot(figure1[0], figure1[1],'o-',lw=2, color='black')# return p# 配置及初始化
center_point = [1.767767, -8.838835] # 圆周运动的圆心
radius = 2 # 圆半径
link_length = [5, 7.5] # 杆件长度 in cm
config_degree_relation_list=[+0, +225, +0]
servo = [0, 0, 0]
servo_degree = [0, 0, 0]
servo_SIG = [32, 33] # PWM信号端
servo_VCC = [2, 4, 1] # VCC端
servo_GND = [30, 34, 39] # GND端
servo_freq = 50 # PWM频率
servo_width_min = 2.5 # 工作脉宽最小值
servo_width_max = 12.5 # 工作脉宽最大值
GPIO.setmode(GPIO.BOARD) # 初始化GPIO引脚编码方式
for i in range(0, len(servo_SIG)):GPIO.setup(servo_SIG[i], GPIO.OUT)servo[i] = GPIO.PWM(servo_SIG[i], servo_freq)servo[i].start(0)servo[i].ChangeDutyCycle((servo_width_min + servo_width_max) / 2) # 回归舵机中位
print("初始化回零完成,两秒后等待操作")
time.sleep(2)# # matplotlib可视化部分
# fig, ax = plt.subplots() # 建立图像
# plt.axis("equal")
# plt.grid()
# ax.set(xlabel='X', ylabel='Y', title='mini pupper IK RR model Circle Plot')
# ani = animation.FuncAnimation(fig, animate_plot, interval=1, blit=True)
# plt.show()
n = 0
try: # try和except为固定搭配,用于捕捉执行过程中,用户是否按下ctrl+C终止程序while 1:n = n + 1animate_plot(n)time.sleep(0.005)
except KeyboardInterrupt:passfor i in range(0, len(servo_SIG)):servo[i].stop() # 停止pwm
GPIO.cleanup() # 清理GPIO引脚实验总结
经过本知识点的学习和实验操作,你应该能达到以下水平:
| 知识点 | 内容 | 了解 | 熟悉 | 掌握 |
|---|---|---|---|---|
| 逆运动学 | 运动学逆解的有无解、有无多解情况 | ✔ | ||
| 逆运动学 | 运动学逆解的求解 | ✔ | ||
| 逆运动学 | 几何法和代数法 | ✔ | ||
| 硬件 | 单腿舵机的简单校准 | ✔ | ||
| 可视化 | 动态可视化运动学计算结果 | ✔ |
版权信息:教材尚未完善,此处预留版权信息处理方式
mini pupper相关内容可访问:https://github.com/mangdangroboticsclub
相关文章:
实例10:四足机器人运动学逆解可视化与实践
实例10: 四足机器人运动学逆解单腿可视化 实验目的 了解逆运动学的有无解、有无多解情况。了解运动学逆解的求解。熟悉逆运动学中求解的几何法和代数法。熟悉单腿舵机的简单校准。掌握可视化逆向运动学计算结果的方法。 实验要求 拼装一条mini pupper的腿部。运…...

Elasticsearch7.8.0版本优化——路由选择
目录一、Elasticsearch 如何知道一个文档存放在哪个分片二、不带 routing 查询三、带 routing 查询一、Elasticsearch 如何知道一个文档存放在哪个分片 其实是通过这个公式来计算出来:shard hash(routing) % number_of_primary_shardsrouting 默认值是文档的 id&a…...

Go常量的定义和使用const,const特性“隐式重复前一个表达式”,以及iota枚举常量的使用
Go常量的定义和使用const,以及iota枚举常量的使用Go常量constGo中常量的定义和使用Go特性const,"隐式重复前一个表达式"iota 实现枚举常量Go常量const Go语言中的const整合了C语言中的宏定义常量,const只读变量枚举变量 绝大多数情况下,Go常…...
Git学习(1)pro git阅读
目录 目录: 1. 起步 2. Git 基础 3. Git 分支 4. 服务器上的 Git 5. 分布式 Git 第一章 1.3 Git是什么 1.6运行git前的配置 该开源图书网站 Git - Book (git-scm.com) 目录: 1. 起步 1.1 关于版本控制1.2 Git 简史1.3 Git 是什么?1…...
PHY自协商
1. 自协商定义 自动协商模式是端口根据另一端设备的连接速度和双工模式,自动把它的速度调节到最高的公共水平,即线路两端能具有的最快速度和双工模式。 自协商功能允许一个网络设备能够将自己所支持的工作模式信息传达给网络上的对端,并接受对…...

【大数据离线开发】8.2 Hive的安装和配置
8.3 Hive的安装和配置 安装模式: 嵌入模式 :不需要使用MySQL,需要Hive自带的一个关系型数据库:Derby本地模式、远程模式 ----> 需要MySQL数据库的支持 安装 hive 安装包 1、解压tar -zxvf apache-hive-2.3.0-bin.tar.gz -C…...

Capture Modules:车载网络报文捕获模块
(以下所有图片均来源于Technica官网) Technica Engineering的新一代硬件设备,即Capture Modules,提供了五种变体以涵盖不同带宽的车载以太网(100BASE-T1和1000BASE-T1)以及常见的IVN技术(CAN、C…...

数据结构与算法系列之时间与空间复杂度
这里写目录标题算法的复杂度大O的渐进表示法实例分析空间复杂度每日一题算法的复杂度 衡量一个算法的好坏,一般 是从时间和空间两个维度来衡量的, 即时间复杂度和空间复杂度。 时间复杂度主要衡量一个算法的运行快慢, 空间复杂度主要衡量一个…...

Python代码使用PyQt5制作界面并封装
目录参考链接续:https://blog.csdn.net/yulinxx/article/details/93344163 若要对此程序进行封装,加个界面,然后制作成 EXE, 使用 PyQt5 制作界面,PyInstaller 进行封装成 EXE 可参考: Python制作小软件…...
【Node.js】MySQL数据库的第三方模块(mysql)
mysql安装操作MySQL数据库的第三方模块(mysql)通过第三方模块(mysql2)连接到MySQL数据库mysql插入数据mysql插入数据的便捷方式mysql更新数据mysql更新数据的便捷方式mysql删除数据安装操作MySQL数据库的第三方模块(my…...

Docker中安装并配置单机版redis
1、使用docker安装redis 搜索Reis镜像,这里展示的是官方最新的镜像docker search redis 使用官方dockerhub搜索redis 2、选用常用的redis5.0作为安装的版本docker pull redis:5.0 3、运行redis容器的两种方式 3.1 不映射外部配置文件直接运行redis5.0镜像docker …...
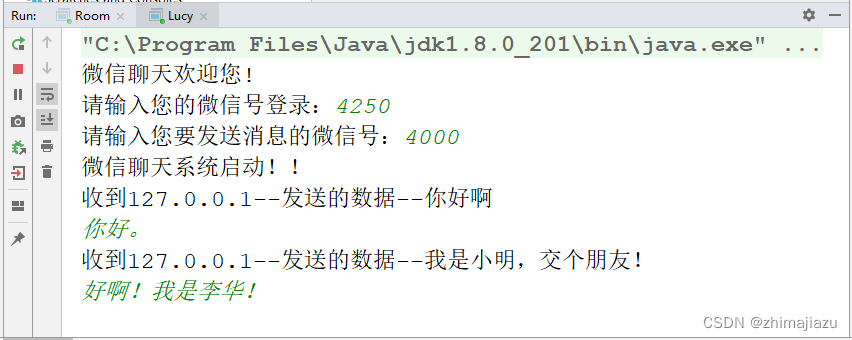
模拟微信聊天-课后程序(JAVA基础案例教程-黑马程序员编著-第八章-课后作业)
【案例9-1】 模拟微信聊天 【案例介绍】 1.案例描述 在如今,微信聊天已经人们生活中必不可少的重要组成部分,人们的交流很多都是通过微信来进行的。本案例要求:将多线程与UDP通信相关知识结合,模拟实现微信聊天小程序。通过监…...

html2canvas将页面dom元素内容渲染成图片保存至本地
html2canvas:https://html2canvas.hertzen.com/configuration/ github:https://github.com/niklasvh/html2canvas 效果 代码 <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8"><meta http-equiv"X-UA-Compa…...
前端进阶JS运行原理
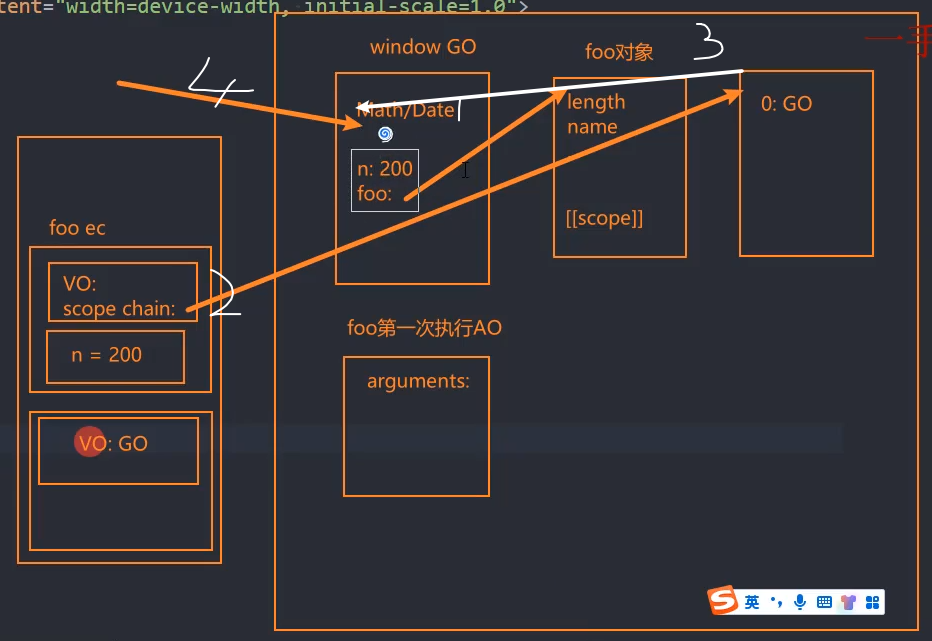
JS运行原理 深入了解V8引擎原理 浏览器内核是由两部分组成的,以webkit为例: WebCore:负责HTML解析、布局、渲染等等相关的工作;JavaScriptCore:解析、执行JavaScript代码; 官方对V8引擎的定义࿱…...
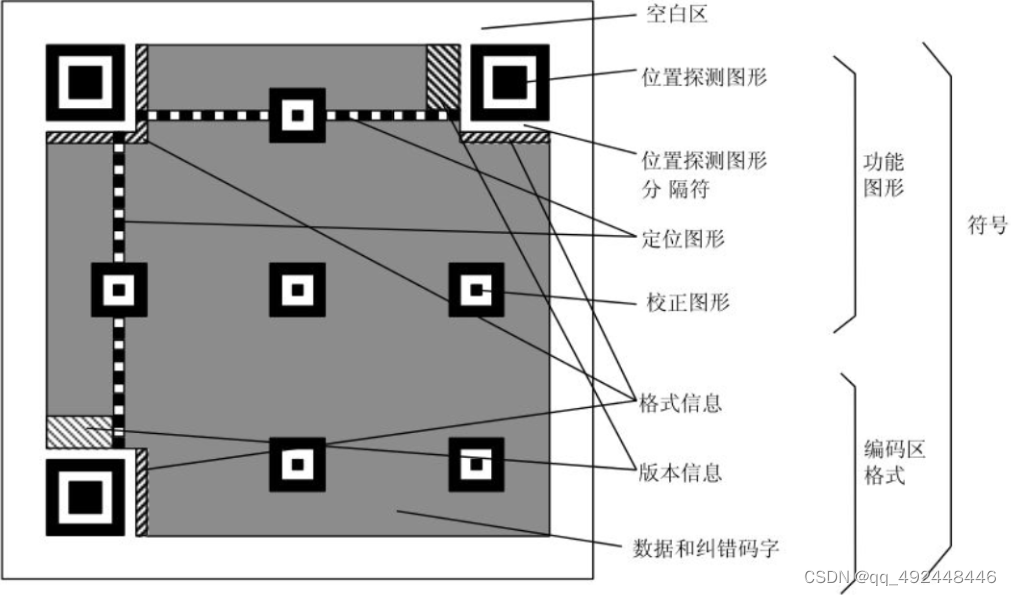
Python识别二维码的两种方法(cv2)
在学习Python处理二维码的过程中,我们看到的大多是“用python生成酷炫二维码”、“用Python制作动图二维码”之类的文章。而关于使用Python批量识别二维码的教程,并不多见。所以今天我会给大家分享两种批量识别二维码的Python技巧!pyzbar PI…...

用一个例子告诉你 怎样使用Spark中RDD的算子
目录 1. 前言 1.1 操作分类 1.2 语法知识 2. transformations 2.1 map 2.2 mapPartitions 2.3 flatMap 2.4 glom 2.5 groupBy 2.6 filter 2.7 sample 2.8 distinct 2.9 coalesce 2.10 repartition 2.11 sortBy 2.12 partitionBy 2.13 reduceByKey 2.14 gro…...
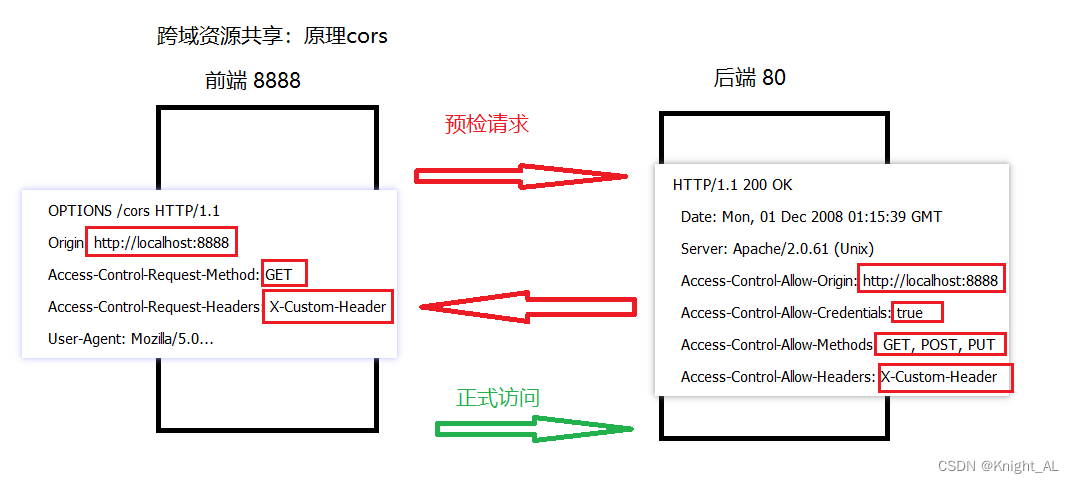
什么是跨域? 出现原因及解决方法
目录一、什么是跨域二、为什么有跨域问题?三、解决跨域问题的方案1.Jsonp2.nginx3.CORS3.1 什么是cors3.2 原理四、GateWay网关中实现跨域步骤一、什么是跨域 跨域:浏览器对于javascript的同源策略的限制 。 同源政策的目的,是为了保证用户…...

低代码系统能够解决哪些痛点?
低代码系统能够解决哪些痛点?如果用4句话去归纳,低代码开发可以解决以下问题—— 为企业提供更高的灵活性,用户可以突破代码的限制自主开发业务应用;通过减少对专业软件开发人员的依赖,公司可以快速响应市场上的新业务…...

华为OD机试题,用 Java 解【两数之和绝对值最小】问题
最近更新的博客 华为OD机试题,用 Java 解【停车场车辆统计】问题华为OD机试题,用 Java 解【字符串变换最小字符串】问题华为OD机试题,用 Java 解【计算最大乘积】问题华为OD机试题,用 Java 解【DNA 序列】问题华为OD机试 - 组成最大数(Java) | 机试题算法思路 【2023】使…...

AcWing算法提高课-3.1.1热浪
宣传一下算法提高课整理 <— CSDN个人主页:更好的阅读体验 <— 题目传送门点这里 题目描述 德克萨斯纯朴的民众们这个夏天正在遭受巨大的热浪!!! 他们的德克萨斯长角牛吃起来不错,可是它们并不是很擅长生产富…...

龙虎榜——20250610
上证指数放量收阴线,个股多数下跌,盘中受消息影响大幅波动。 深证指数放量收阴线形成顶分型,指数短线有调整的需求,大概需要一两天。 2025年6月10日龙虎榜行业方向分析 1. 金融科技 代表标的:御银股份、雄帝科技 驱动…...
docker详细操作--未完待续
docker介绍 docker官网: Docker:加速容器应用程序开发 harbor官网:Harbor - Harbor 中文 使用docker加速器: Docker镜像极速下载服务 - 毫秒镜像 是什么 Docker 是一种开源的容器化平台,用于将应用程序及其依赖项(如库、运行时环…...
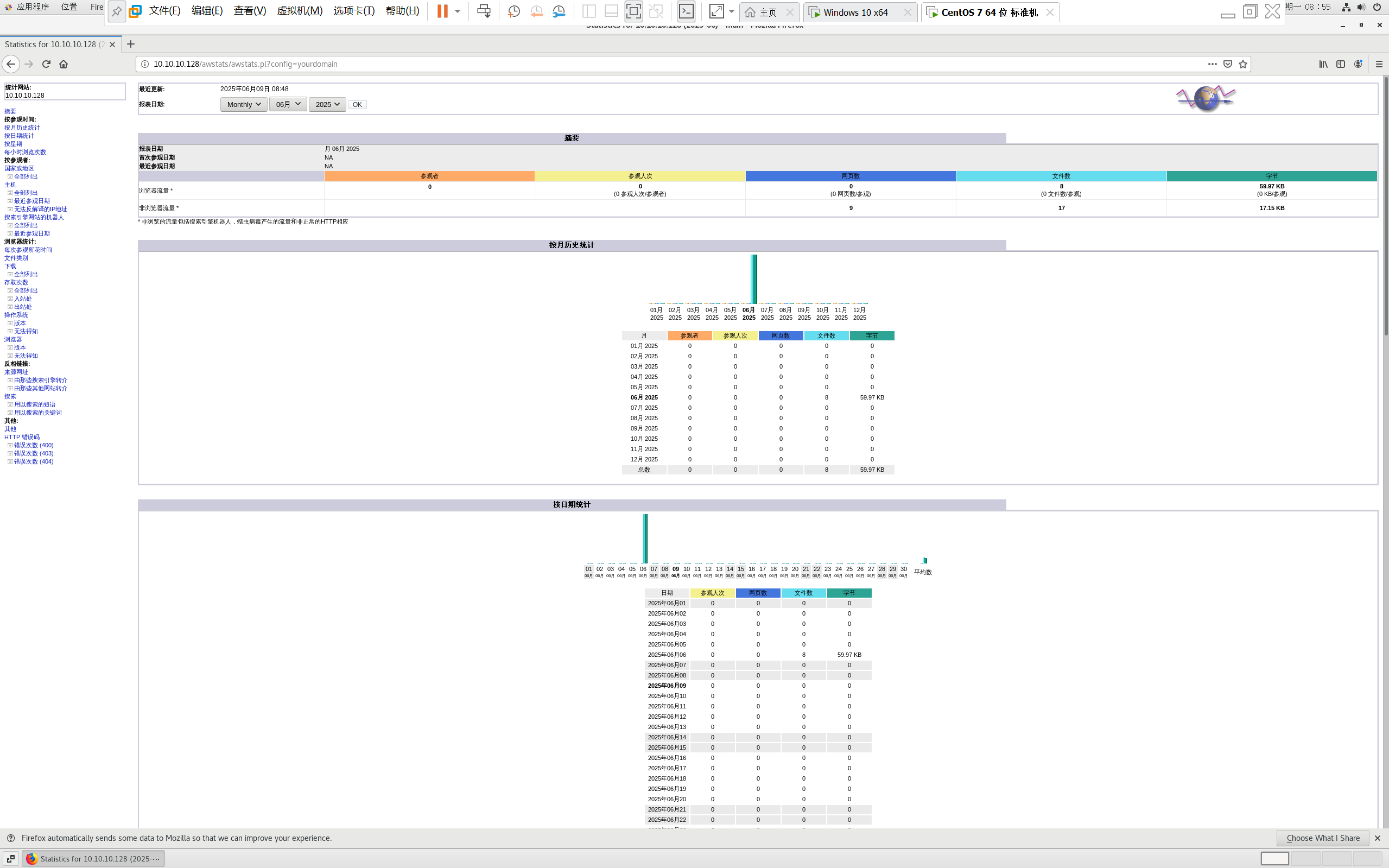
centos 7 部署awstats 网站访问检测
一、基础环境准备(两种安装方式都要做) bash # 安装必要依赖 yum install -y httpd perl mod_perl perl-Time-HiRes perl-DateTime systemctl enable httpd # 设置 Apache 开机自启 systemctl start httpd # 启动 Apache二、安装 AWStats࿰…...

可靠性+灵活性:电力载波技术在楼宇自控中的核心价值
可靠性灵活性:电力载波技术在楼宇自控中的核心价值 在智能楼宇的自动化控制中,电力载波技术(PLC)凭借其独特的优势,正成为构建高效、稳定、灵活系统的核心解决方案。它利用现有电力线路传输数据,无需额外布…...
全球首个30米分辨率湿地数据集(2000—2022)
数据简介 今天我们分享的数据是全球30米分辨率湿地数据集,包含8种湿地亚类,该数据以0.5X0.5的瓦片存储,我们整理了所有属于中国的瓦片名称与其对应省份,方便大家研究使用。 该数据集作为全球首个30米分辨率、覆盖2000–2022年时间…...

新能源汽车智慧充电桩管理方案:新能源充电桩散热问题及消防安全监管方案
随着新能源汽车的快速普及,充电桩作为核心配套设施,其安全性与可靠性备受关注。然而,在高温、高负荷运行环境下,充电桩的散热问题与消防安全隐患日益凸显,成为制约行业发展的关键瓶颈。 如何通过智慧化管理手段优化散…...

【git】把本地更改提交远程新分支feature_g
创建并切换新分支 git checkout -b feature_g 添加并提交更改 git add . git commit -m “实现图片上传功能” 推送到远程 git push -u origin feature_g...
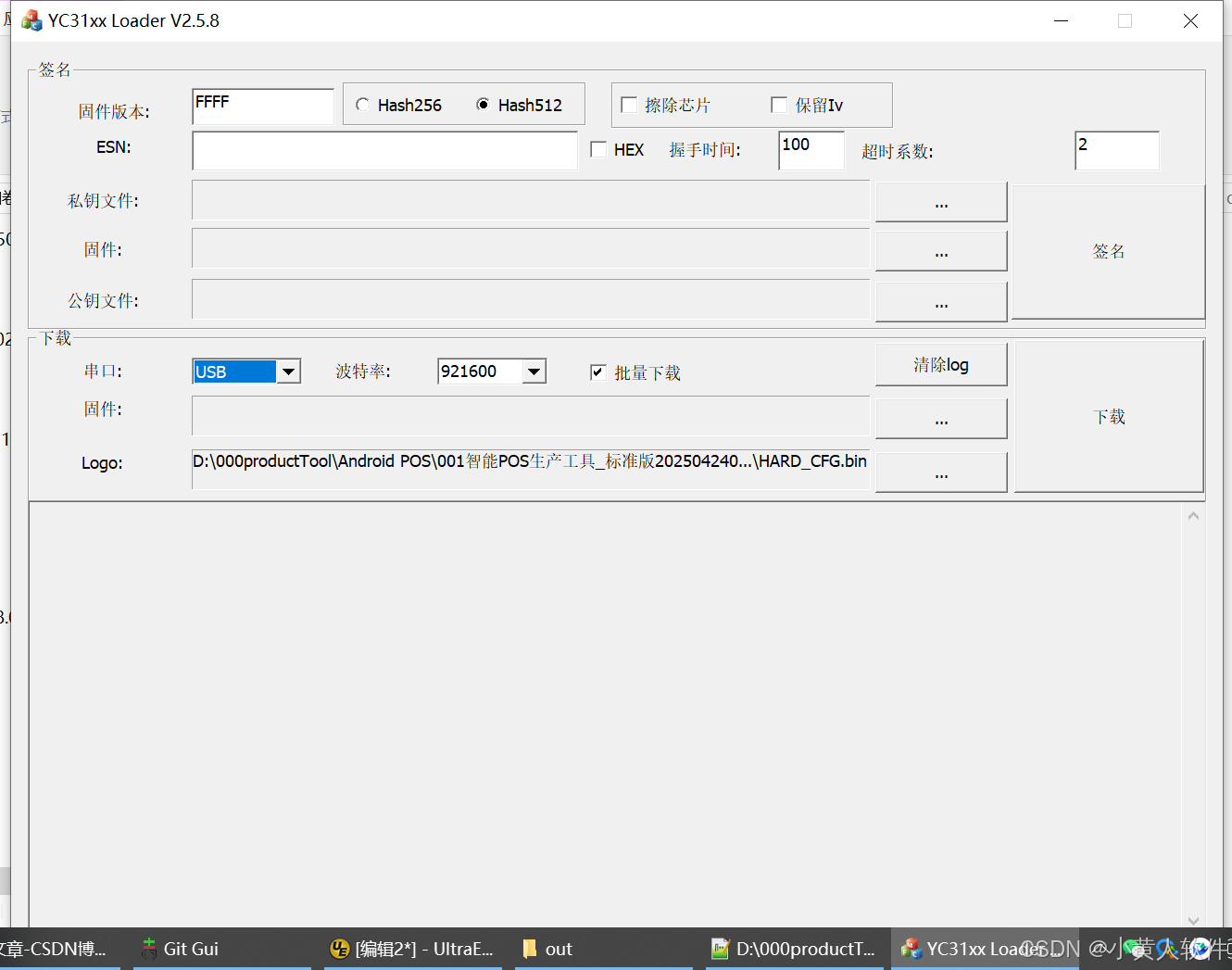
C++ Visual Studio 2017厂商给的源码没有.sln文件 易兆微芯片下载工具加开机动画下载。
1.先用Visual Studio 2017打开Yichip YC31xx loader.vcxproj,再用Visual Studio 2022打开。再保侟就有.sln文件了。 易兆微芯片下载工具加开机动画下载 ExtraDownloadFile1Info.\logo.bin|0|0|10D2000|0 MFC应用兼容CMD 在BOOL CYichipYC31xxloaderDlg::OnIni…...
:邮件营销与用户参与度的关键指标优化指南)
精益数据分析(97/126):邮件营销与用户参与度的关键指标优化指南
精益数据分析(97/126):邮件营销与用户参与度的关键指标优化指南 在数字化营销时代,邮件列表效度、用户参与度和网站性能等指标往往决定着创业公司的增长成败。今天,我们将深入解析邮件打开率、网站可用性、页面参与时…...
的使用)
Go 并发编程基础:通道(Channel)的使用
在 Go 中,Channel 是 Goroutine 之间通信的核心机制。它提供了一个线程安全的通信方式,用于在多个 Goroutine 之间传递数据,从而实现高效的并发编程。 本章将介绍 Channel 的基本概念、用法、缓冲、关闭机制以及 select 的使用。 一、Channel…...