从零开始的机械臂yolov5抓取gazebo仿真(环境搭建篇下)
sunday功能包使用介绍以及开源
sunday我给自己机械臂的命名,原型是innfos的gluon机械臂。通过sw模型文件转urdf。Sunday项目主要由六个功能包sunday_description、sunday_gazebo、sunday_moveit_config、yolov5_ros、vacuum_plugin、realsense_ros_gazebo组成,下面我将介绍这六个功能包。
个人环境
首先介绍个人使用环境,博主使用的是Ubuntu18.04+gtx1660ti显卡+ros_melodic+cuda10.2+pytorch1.8+yolov5-6.1。环境配置的教程详见上一篇博客:
https://blog.csdn.net/qq_48427527/article/details/129201676?spm=1001.2014.3001.5502
sunday_description
sunday_description是由sw插件导出的功能包,我主要对sunday_description/urdf中的urdf文件进行修改,并配置xacro文件。
sunday_description/launch/sunday_rviz.launch
文件用于观察我所配置的xacro文件的模型状态。
sunday_moveit_config
基于sunday_description/urdf/sunday.xacro对moveit进行配置修改方面还是参考古月的课程进行的修改。
修改过的文件:
sunday_moveit_config/config/controllers_gazebo.yamlsunday_moveit_config/launch/moveit_rviz.launchsunday_moveit_config/launch/moveit_planning_execution.launch
sunday_gazebo
该功能包主要用于配置机械臂操作的gazebo仿真环境,具体配置也是参考古月的课程,几个launch文件分别用于发布机械臂关节的状态以及与moveit做对接。
sunday_gazebo/launch/sunday_bringup_moveit.launch
该launch文件里面包含了所有节点,包括yolov5节点。如果你还未配置好yolov5环境,也可以使用以下不包含yolov5的launch文件打开gazebo环境。
sunday_gazebo/launch/sunday_bringup_moveit_origin.launch
yolov5_ros
该功能包是我在csdn上边找到的,封装了yolov5,能以launch文件启动,并发布话题,个人感觉还不错。地址:
YoloV5 的ros功能包
git clone https://github.com/qq44642754a/Yolov5_ros.git
具体使用过程就是将训练好的权重放置进功能包中对应launch文件的路径下边,在launch文件中修改话题名称以及其它参数即可。
vacuum_plugin
vacuum_plugin是一个吸盘的插件,在urdf中插入该插件即可在gazebo中实现吸盘的功能。
git clone https://github.com/tatsuya-s/gazebo_ros_vacuum_gripper_debugger
在sunday_description/urdf/sunday.xacro第490行添加插件
<!-- vacuum_gripper plugin --><gazebo><plugin name="gazebo_ros_vacuum_gripper" filename="libvacuum_plugin.so"><robotNamespace>/sunday/vacuum_gripper</robotNamespace><bodyName>link_6</bodyName><topicName>grasping</topicName><maxDistance>0.05</maxDistance><minDistance>0.03</minDistance></plugin>
</gazebo>
realsense_ros_gazebo
realsense_ros_gazebo功能包是realsense的gazebo功能包,其仿真效果与实物相同,且其中包含多款realsense型号的模型文件,其中便包含本项目中使用的realsenseD435i摄像头,可以将原urdf中的摄像头删除,调用该功能包的模型进行替换。
git clone https://github.com/nilseuropa/realsense_ros_gazebo.git
在sunday_description/urdf/sunday.xacro第454行添加代码
<xacro:include filename="$(find realsense_ros_gazebo)/xacro/depthcam.xacro"/>
<xacro:realsense_d435 sensor_name="camera" parent_link="link_5" rate="30"><origin xyz="-0.00068847 -0.06 -0.13" rpy="-3.14 0 -1.5708"/>
</xacro:realsense_d435>
gripper_model
gripper_model并不是一个功能包,这个包里有四个模型文件,对应视频中的三个多边形体以及,喂食过程中的人物张嘴闭嘴展板。模型文件的制作以及贴图的教程可以看我之前写的博客。博客地址:
https://blog.csdn.net/qq_48427527/article/details/124477608?spm=1001.2014.3001.5502
将四个模型拷贝放置到.gazebo/models路径,注意不能将整个包拷贝,仅将四个模型文件拷贝即可。
使用教程
现将几个模型文件gripper_model中的几个模型文件放到.gazebo/models路径中
将sunday.zip解压置于xx_ws/src路径下
cd xx_wscatkin_makesource devel/setup.bashconda activate 之前创建的虚拟环境roslaunch sunday_gazebo sunday_bringup_moveit.launch(该launch包含yolov5节点,因此需要在conda环境中运行)新开一个终端roscd sunday_gazebo/scriptspython grasp&feed.py(该脚本无需进入conda环境中运行)
在终端中输入想要拾取物体的名称,从而实现物体的拾取以及喂食/视频第一部分pick&placeconda activate 之前创建的虚拟环境
roslaunch sunday_gazebo sunday_bringup_moveit.launch
将gazebo中的展板挪远一点新开终端
roscd sunday_gazebo/scripts
python grasp.py
在终端中输入想要拾取物体的名称,从而实现物体的拾取
由于用于训练的多边形样本照片过少,如果出现展板挡住多边形模型出现阴影从而无法准确识别的情况,可以拖动或者旋转多边形模型通过调整位姿实现物体识别。
开源地址
github无法上传开源的三个功能包,因此我将所有功能包都打包放在百度网盘里面。
网盘链接:
链接: https://pan.baidu.com/s/1thKsIPsyBFtpiPuAC-VgeA 密码: mogp
–来自百度网盘超级会员V3的分享
github:https://github.com/Lord-Z/sunday
资料
1.YoloV5 的ros功能包
2.realsense_ros_gazebo
3.vacuum_plugin
相关文章:
)
从零开始的机械臂yolov5抓取gazebo仿真(环境搭建篇下)
sunday功能包使用介绍以及开源 sunday我给自己机械臂的命名,原型是innfos的gluon机械臂。通过sw模型文件转urdf。Sunday项目主要由六个功能包sunday_description、sunday_gazebo、sunday_moveit_config、yolov5_ros、vacuum_plugin、realsense_ros_gazebo组成&…...

GCC编译器 MinGW的下载安装使用教程
哎 总所周知 gcc可以用来编译C 和C。在linux广泛应用,那么window怎么使用gcc呢。就要用到gcc的window工具----MInGW,安装好之后,直接可以在windows的dos界面编译。下面讲解安装使用过程。1.官网下载MinGW - Minimalist GNU for Windows downl…...

【项目实战】SpringMVC配置全局属性,是实现WebMvcConfigurer接口,还是直接继承WebMvcConfigurationSupport类?
一、说明 官方推荐以下两种方式来配置全局的SpringMVC的相关属性 方式一:实现WebMvcConfigurer接口(推荐)方式二:直接继承WebMvcConfigurationSupport类。介绍一下两者区别吧。 二、 WebMvcConfigurer介绍 WebMvcConfigurer是一个接口,用于配置全局的SpringMVC的相关属…...

房产营销、地产中介如何高效低成本获客?
数字化对企业而言,机遇和挑战并存。房产企业可借助数字化加强日益扩大的业务规模和业务领域管理,以提升管理效率,降低管理难度;基于数字化技术加强客户的服务体验,进而收集多业态客户和场景数据,拓展创新业…...

Kotlin-作用域函数
在对象的上下文中执行代码块。当您在提供lambda表达式的对象上调用这样的函数时,它会形成一个临时作用域。在此范围内,可以不带名称地访问对象。这样的函数称为作用域函数。 let run with apply also 作用域函数不会引入任何新的技术功能,但它…...

QNX7.1 交叉编译开源库
1.下载QNX7.1 SDK并解压 ITL:~/work/tiqnx710$ ls -l 总用量 16 drwxrwxr-x 4 xxx4096 1月 28 13:38 host -rwxrwxr-x 1 xxx 972 1月 28 13:38 qnxsdp-env.bat -rwxrwxr-x 1 xxx 1676 1月 28 13:38 qnxsdp-env.sh drwxrwxr-x 3 xxx 4096 1月 28 13:38 target xxxITL:~/work/ti…...

论文投稿指南——中文核心期刊推荐(外国语言)
【前言】 🚀 想发论文怎么办?手把手教你论文如何投稿!那么,首先要搞懂投稿目标——论文期刊 🎄 在期刊论文的分布中,存在一种普遍现象:即对于某一特定的学科或专业来说,少数期刊所含…...

Fabric系列 - 链码-内部链码的特性
(1)Fabric repo下的案例 Chaincode(1.4的目录结构) fabric/examples/chaincode/go ├── example02 #一个简单的转账合约 ├── eventsender #发送事件通知 ├── passthru #调用其他链码(或者其他channel的链码)example02 (转账) 一个简单的转账合约。该链码简单实…...
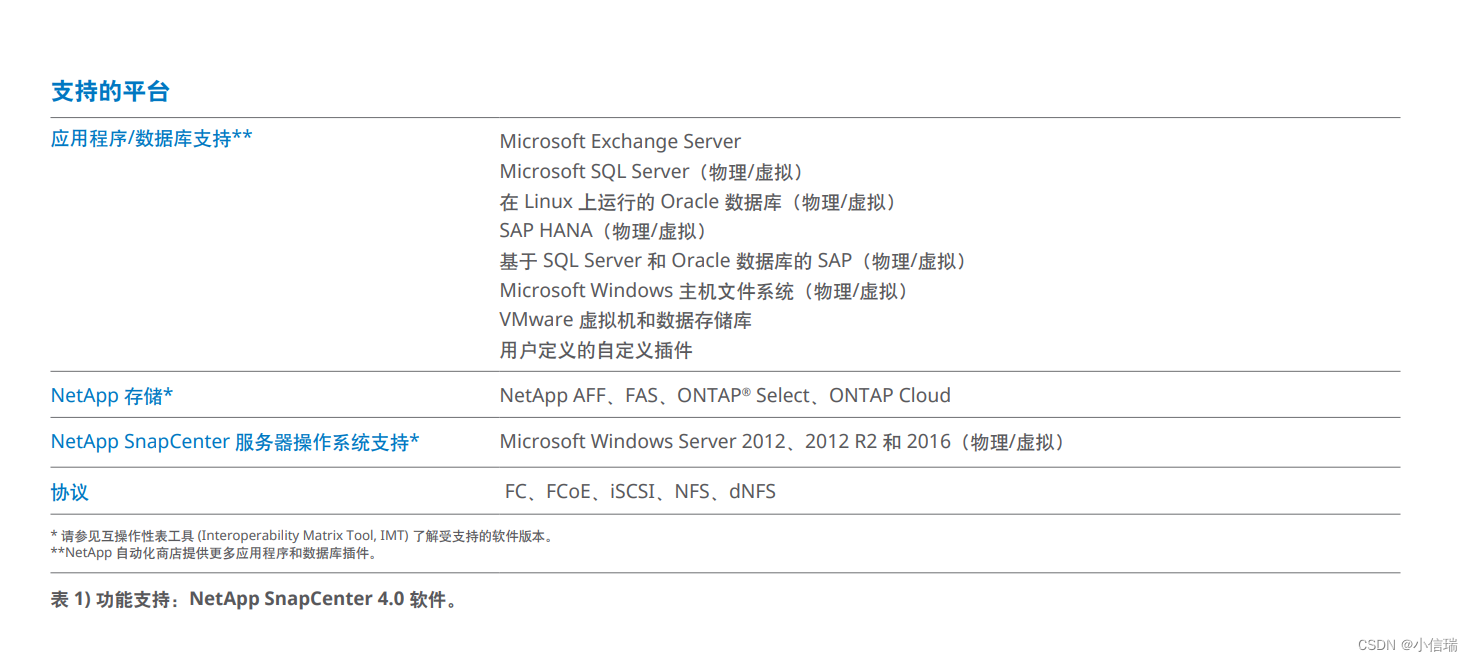
NetApp SnapCenter 备份管理 ——借助应用程序一致的数据备份管理,简化混合云操作
NetApp SnapCenter 简单、可扩展、赋权:跨 Data Fabric 的企业级数据保护和克隆管理 主要优势 • 利用与应用程序集成的工作流和预定义策略简化备份、恢复和克隆管理。 • 借助基于存储的数据管理功能提高性能和可用性,并缩短测试和开发用时。 • 提供基…...
Java内置队列和高性能队列Disruptor
一、队列简介 队列是一种特殊的线性表,遵循先入先出、后入后出(FIFO)的基本原则,一般来说,它只允许在表的前端进行删除操作,而在表的后端进行插入操作,但是java的某些队列运行在任何地方插入删…...
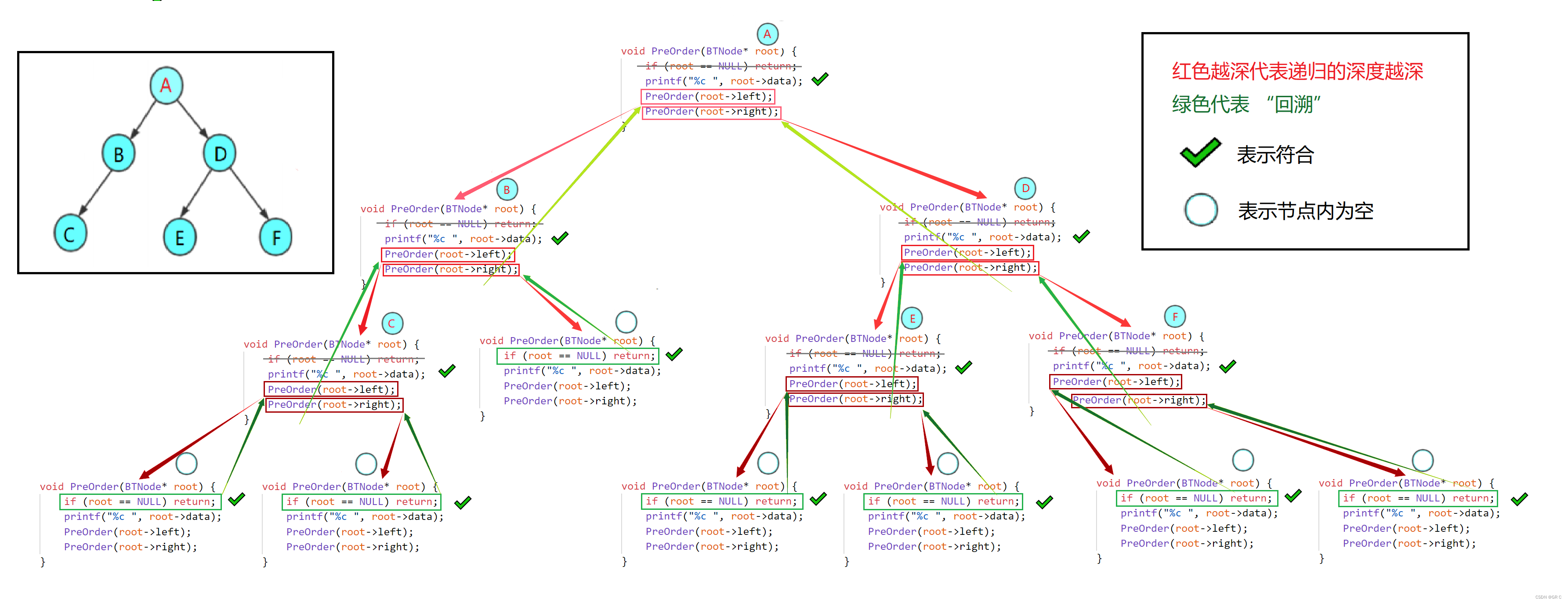
比特数据结构与算法(第四章_下)二叉树的遍历
本章将会详细讲解二叉树遍历的四种方式,分别为前序遍历、中序遍历、后续遍历和层序遍历。在学习遍历之前,会先带大家回顾一下二叉树的基本概念。学习二叉树的基本操作前,需要先创建一颗二叉树,然后才能学习其相关的基本操作&#…...

chatGPT是什么
2022年11月,人工智能公司OpenAI推出了一款聊天机器人:ChatGPT。它能够通过学习和理解人类语言来进行对话,还能与聊天对象进行有逻辑的互动。除了聊天,ChatGPT还能够根据聊天对象提出的要求,进行文字翻译、文案撰写、代…...
jenkins漏洞集合
目录 CVE-2015-8103 反序列化远程代码执行 CVE-2016-0788 Jenkins CI和LTS 远程代码执行漏洞 CVE-2016-0792 低权限用户命令执行 CVE-2016-9299 代码执行 CVE-2017-1000353 Jenkins-CI 远程代码执行 CVE-2018-1000110 用户枚举 CVE-2018-1000861 远程命令执行 CVE-2018…...

用canvas画一个炫酷的粒子动画倒计时
前言 😆 这是一篇踩在活动尾声的文章,主要是之前在摸鱼社群里有人发了个粒子动画的特效视频,想着研究研究写一篇文章出来看看,结果这一下子就研究了半个多月。 😂 下面就把研究成果通过文字的形式展现出来吧…...

Java技术学习——Maven相关知识
一、什么是Maven? Maven是Apache软件基金会组织维护的一款专门为Java项目提供构建和依赖管理支持的工具。 1.1 构建 构建过程包含的主要环节如下: 清理:删除上一次构建的结果,为下一次构建做好准备编译:Java源程序…...
C++ 认识和了解C++
1.在使用C语言写代码的时候开头要用到的是: #include<iostream> using namespace std;不可以写成这样: #include iostream.h(1)iostream是输入输出流类, istream输入流类 cin >> ostream输出流类 cout &…...

u盘误删的文件怎么找回
u盘误删的文件怎么找回?u盘的特点之一就是极其便携,可以容纳各种格式的数据和文件,需要时可以直接使用。每次使用都会或多或少的存放一些文件,但有使用就会有删除,为了不影响使用性,清理存储空间是必要的。清理中如果…...
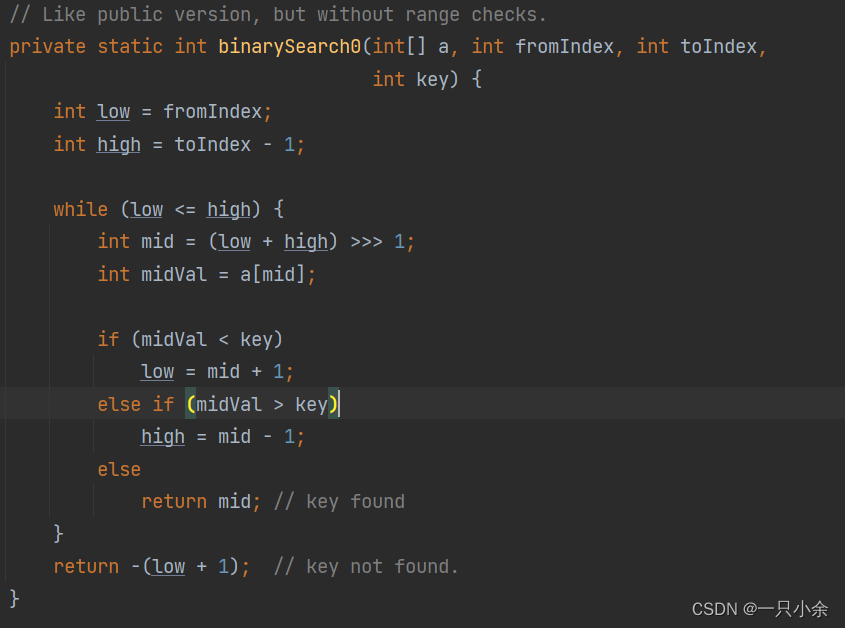
二分查找由浅入深--算法--java
二分查找写在开头算法前提:算法逻辑算法实现简单实现leftright可能超过int表示的最大限度代码分析和变换更多需求:求索引最小的值java二分API应用基础题思考难度方法写在开头 二分查找应该是算比较简单的这种算法了,我本以为还可以。但有时候…...
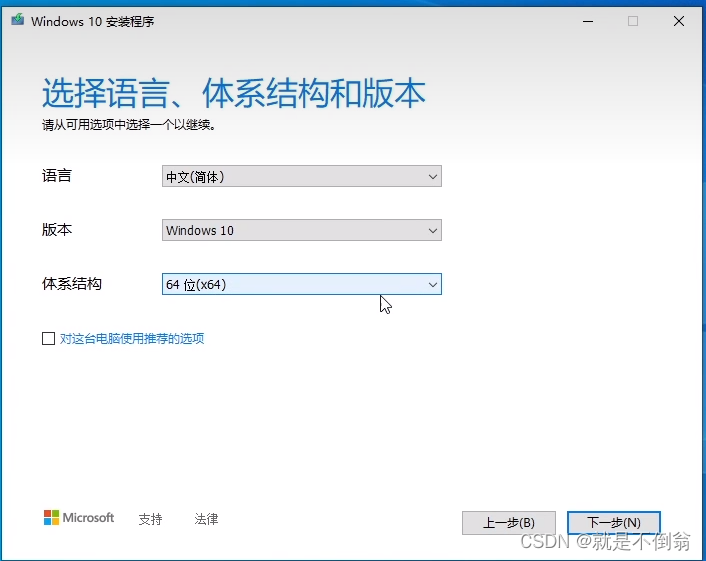
【学习】笔记本电脑重新安装系统win10
安装系统有很多方法: 软件安装制作启动u盘本文使用的方法就是启动盘安装: 1.首先下载iso镜像文件: msdn我告诉你:MSDN, 我告诉你 - 做一个安静的工具站 (itellyou.cn) 2.下载启动盘制作工具: 制作启动盘rufus:Rufus - 轻松创建 USB 启动盘 3.官网下载: https://do…...
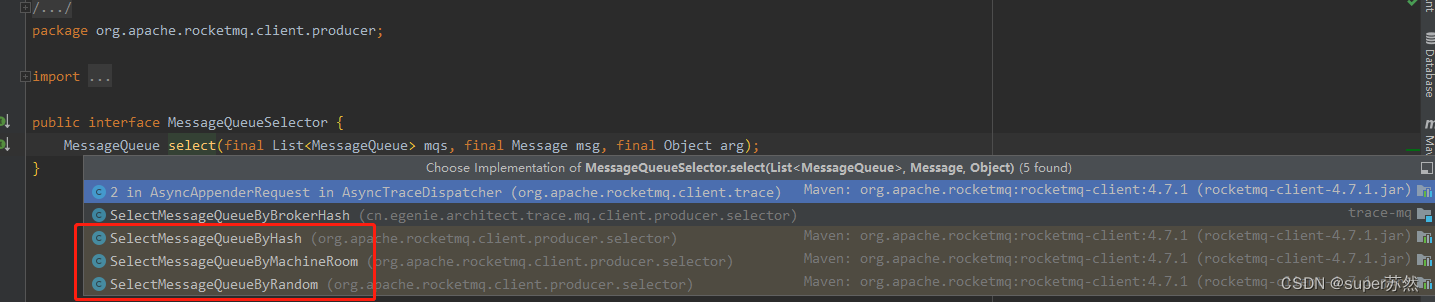
RocketMQ的一些使用理解
1.RocketMQ的生产者生产负载策略(3种) (1)SelectMessageQueueByHash (一致性hash) (2)SelectMessageQueueByMachineRoom (机器随机) (3)SelectMessageQueueByRandom (随机) 第1种一…...
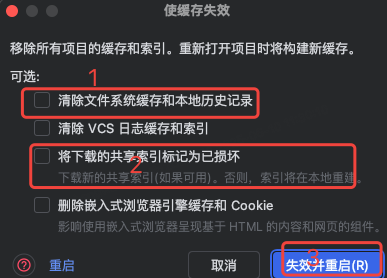
idea大量爆红问题解决
问题描述 在学习和工作中,idea是程序员不可缺少的一个工具,但是突然在有些时候就会出现大量爆红的问题,发现无法跳转,无论是关机重启或者是替换root都无法解决 就是如上所展示的问题,但是程序依然可以启动。 问题解决…...

R语言AI模型部署方案:精准离线运行详解
R语言AI模型部署方案:精准离线运行详解 一、项目概述 本文将构建一个完整的R语言AI部署解决方案,实现鸢尾花分类模型的训练、保存、离线部署和预测功能。核心特点: 100%离线运行能力自包含环境依赖生产级错误处理跨平台兼容性模型版本管理# 文件结构说明 Iris_AI_Deployme…...

【Oracle】分区表
个人主页:Guiat 归属专栏:Oracle 文章目录 1. 分区表基础概述1.1 分区表的概念与优势1.2 分区类型概览1.3 分区表的工作原理 2. 范围分区 (RANGE Partitioning)2.1 基础范围分区2.1.1 按日期范围分区2.1.2 按数值范围分区 2.2 间隔分区 (INTERVAL Partit…...

CMake控制VS2022项目文件分组
我们可以通过 CMake 控制源文件的组织结构,使它们在 VS 解决方案资源管理器中以“组”(Filter)的形式进行分类展示。 🎯 目标 通过 CMake 脚本将 .cpp、.h 等源文件分组显示在 Visual Studio 2022 的解决方案资源管理器中。 ✅ 支持的方法汇总(共4种) 方法描述是否推荐…...

Spring是如何解决Bean的循环依赖:三级缓存机制
1、什么是 Bean 的循环依赖 在 Spring框架中,Bean 的循环依赖是指多个 Bean 之间互相持有对方引用,形成闭环依赖关系的现象。 多个 Bean 的依赖关系构成环形链路,例如: 双向依赖:Bean A 依赖 Bean B,同时 Bean B 也依赖 Bean A(A↔B)。链条循环: Bean A → Bean…...

AI语音助手的Python实现
引言 语音助手(如小爱同学、Siri)通过语音识别、自然语言处理(NLP)和语音合成技术,为用户提供直观、高效的交互体验。随着人工智能的普及,Python开发者可以利用开源库和AI模型,快速构建自定义语音助手。本文由浅入深,详细介绍如何使用Python开发AI语音助手,涵盖基础功…...
)
uniapp 集成腾讯云 IM 富媒体消息(地理位置/文件)
UniApp 集成腾讯云 IM 富媒体消息全攻略(地理位置/文件) 一、功能实现原理 腾讯云 IM 通过 消息扩展机制 支持富媒体类型,核心实现方式: 标准消息类型:直接使用 SDK 内置类型(文件、图片等)自…...

Spring Boot + MyBatis 集成支付宝支付流程
Spring Boot MyBatis 集成支付宝支付流程 核心流程 商户系统生成订单调用支付宝创建预支付订单用户跳转支付宝完成支付支付宝异步通知支付结果商户处理支付结果更新订单状态支付宝同步跳转回商户页面 代码实现示例(电脑网站支付) 1. 添加依赖 <!…...

前端开发者常用网站
Can I use网站:一个查询网页技术兼容性的网站 一个查询网页技术兼容性的网站Can I use:Can I use... Support tables for HTML5, CSS3, etc (查询浏览器对HTML5的支持情况) 权威网站:MDN JavaScript权威网站:JavaScript | MDN...

SQL进阶之旅 Day 22:批处理与游标优化
【SQL进阶之旅 Day 22】批处理与游标优化 文章简述(300字左右) 在数据库开发中,面对大量数据的处理任务时,单条SQL语句往往无法满足性能需求。本篇文章聚焦“批处理与游标优化”,深入探讨如何通过批量操作和游标技术提…...