【ROS学习笔记9】ROS常用API
【ROS学习笔记9】ROS常用API
文章目录
- 【ROS学习笔记9】ROS常用API
- 前言
- 一、 初始化
- 二、 话题与服务相关对象
- 三、 回旋函数
- 四、时间函数
- 五、其他函数
- Reference
写在前面,本系列笔记参考的是AutoLabor的教程,具体项目地址在 这里
前言
ROS的常用API,请参考官网
一、 初始化
Cpp
/** @brief ROS初始化函数。** 该函数可以解析并使用节点启动时传入的参数(通过参数设置节点名称、命名空间...) ** 该函数有多个重载版本,如果使用NodeHandle建议调用该版本。 ** \param argc 参数个数* \param argv 参数列表* \param name 节点名称,需要保证其唯一性,不允许包含命名空间* \param options 节点启动选项,被封装进了ros::init_options**/
void init(int &argc, char **argv, const std::string& name, uint32_t options = 0);
Python
def init_node(name, argv=None, anonymous=False, log_level=None, disable_rostime=False, disable_rosout=False, disable_signals=False, xmlrpc_port=0, tcpros_port=0):"""在ROS msater中注册节点@param name: 节点名称,必须保证节点名称唯一,节点名称中不能使用命名空间(不能包含 '/')@type name: str@param anonymous: 取值为 true 时,为节点名称后缀随机编号@type anonymous: bool"""
二、 话题与服务相关对象
C++
在 roscpp 中,话题和服务的相关对象一般由 NodeHandle 创建。
NodeHandle有一个重要作用是可以用于设置命名空间,这是后期的重点,但是本章暂不介绍。
1、发布对象
对象获取:
/**
* \brief 根据话题生成发布对象
*
* 在 ROS master 注册并返回一个发布者对象,该对象可以发布消息
*
* 使用示例如下:
*
* ros::Publisher pub = handle.advertise<std_msgs::Empty>("my_topic", 1);
*
* \param topic 发布消息使用的话题
*
* \param queue_size 等待发送给订阅者的最大消息数量
*
* \param latch (optional) 如果为 true,该话题发布的最后一条消息将被保存,并且后期当有订阅者连接时会将该消息发送给订阅者
*
* \return 调用成功时,会返回一个发布对象
*
*
*/
template <class M>
Publisher advertise(const std::string& topic, uint32_t queue_size, bool latch = false)
消息发布函数:
/**
* 发布消息
*/
template <typename M>
void publish(const M& message) const
2、订阅对象
对象获取:
/*** \brief 生成某个话题的订阅对象** 该函数将根据给定的话题在ROS master 注册,并自动连接相同主题的发布方,每接收到一条消息,都会调用回调* 函数,并且传入该消息的共享指针,该消息不能被修改,因为可能其他订阅对象也会使用该消息。* * 使用示例如下:void callback(const std_msgs::Empty::ConstPtr& message)
{
}ros::Subscriber sub = handle.subscribe("my_topic", 1, callback);*
* \param M [template] M 是指消息类型
* \param topic 订阅的话题
* \param queue_size 消息队列长度,超出长度时,头部的消息将被弃用
* \param fp 当订阅到一条消息时,需要执行的回调函数
* \return 调用成功时,返回一个订阅者对象,失败时,返回空对象
* void callback(const std_msgs::Empty::ConstPtr& message){...}
ros::NodeHandle nodeHandle;
ros::Subscriber sub = nodeHandle.subscribe("my_topic", 1, callback);
if (sub) // Enter if subscriber is valid
{
...
}*/
template<class M>
Subscriber subscribe(const std::string& topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr<M const>&), const TransportHints& transport_hints = TransportHints())
3、服务对象
对象获取:
/**
* \brief 生成服务端对象
*
* 该函数可以连接到 ROS master,并提供一个具有给定名称的服务对象。
*
* 使用示例如下:
\verbatim
bool callback(std_srvs::Empty& request, std_srvs::Empty& response)
{
return true;
}ros::ServiceServer service = handle.advertiseService("my_service", callback);
\endverbatim
*
* \param service 服务的主题名称
* \param srv_func 接收到请求时,需要处理请求的回调函数
* \return 请求成功时返回服务对象,否则返回空对象:
\verbatim
bool Foo::callback(std_srvs::Empty& request, std_srvs::Empty& response)
{
return true;
}
ros::NodeHandle nodeHandle;
Foo foo_object;
ros::ServiceServer service = nodeHandle.advertiseService("my_service", callback);
if (service) // Enter if advertised service is valid
{
...
}
\endverbatim*/
template<class MReq, class MRes>
ServiceServer advertiseService(const std::string& service, bool(*srv_func)(MReq&, MRes&))
4、客户端对象
对象获取:
/** * @brief 创建一个服务客户端对象** 当清除最后一个连接的引用句柄时,连接将被关闭。** @param service_name 服务主题名称*/template<class Service>ServiceClient serviceClient(const std::string& service_name, bool persistent = false, const M_string& header_values = M_string())
请求发送函数:
/*** @brief 发送请求* 返回值为 bool 类型,true,请求处理成功,false,处理失败。*/template<class Service>bool call(Service& service)
等待服务函数1:
/*** ros::service::waitForService("addInts");* \brief 等待服务可用,否则一致处于阻塞状态* \param service_name 被"等待"的服务的话题名称* \param timeout 等待最大时常,默认为 -1,可以永久等待直至节点关闭* \return 成功返回 true,否则返回 false。*/
ROSCPP_DECL bool waitForService(const std::string& service_name, ros::Duration timeout = ros::Duration(-1));
等待服务函数2:
/**
* client.waitForExistence();
* \brief 等待服务可用,否则一致处于阻塞状态
* \param timeout 等待最大时常,默认为 -1,可以永久等待直至节点关闭
* \return 成功返回 true,否则返回 false。
*/
bool waitForExistence(ros::Duration timeout = ros::Duration(-1));
Python
1、发布对象
对象获取:
class Publisher(Topic):"""在ROS master注册为相关话题的发布方"""def __init__(self, name, data_class, subscriber_listener=None, tcp_nodelay=False, latch=False, headers=None, queue_size=None):"""Constructor@param name: 话题名称 @type name: str@param data_class: 消息类型@param latch: 如果为 true,该话题发布的最后一条消息将被保存,并且后期当有订阅者连接时会将该消息发送给订阅者@type latch: bool@param queue_size: 等待发送给订阅者的最大消息数量@type queue_size: int"""
消息发布函数:
def publish(self, *args, **kwds):"""发布消息"""
2、订阅对象
对象获取:
class Subscriber(Topic):"""类注册为指定主题的订阅者,其中消息是给定类型的。"""def __init__(self, name, data_class, callback=None, callback_args=None,queue_size=None, buff_size=DEFAULT_BUFF_SIZE, tcp_nodelay=False):"""Constructor.@param name: 话题名称@type name: str@param data_class: 消息类型@type data_class: L{Message} class@param callback: 处理订阅到的消息的回调函数@type callback: fn(msg, cb_args)@param queue_size: 消息队列长度,超出长度时,头部的消息将被弃用"""
3、服务对象
对象获取:
class Service(ServiceImpl):"""声明一个ROS服务使用示例::s = Service('getmapservice', GetMap, get_map_handler)"""def __init__(self, name, service_class, handler,buff_size=DEFAULT_BUFF_SIZE, error_handler=None):"""@param name: 服务主题名称 ``str``@param service_class:服务消息类型@param handler: 回调函数,处理请求数据,并返回响应数据@type handler: fn(req)->resp"""
4、客户端对象
对象获取:
class ServiceProxy(_Service):"""创建一个ROS服务的句柄示例用法::add_two_ints = ServiceProxy('add_two_ints', AddTwoInts)resp = add_two_ints(1, 2)"""def __init__(self, name, service_class, persistent=False, headers=None):"""ctor.@param name: 服务主题名称@type name: str@param service_class: 服务消息类型@type service_class: Service class"""
请求发送函数:
def call(self, *args, **kwds):"""发送请求,返回值为响应数据"""
等待服务函数:
def wait_for_service(service, timeout=None):"""调用该函数时,程序会处于阻塞状态直到服务可用@param service: 被等待的服务话题名称@type service: str@param timeout: 超时时间@type timeout: double|rospy.Duration"""
三、 回旋函数
C++
在ROS程序中,频繁的使用了 ros::spin() 和 ros::spinOnce() 两个回旋函数,可以用于处理回调函数。
1、spinOnce()
/*** \brief 处理一轮回调** 一般应用场景:* 在循环体内,处理所有可用的回调函数* */
ROSCPP_DECL void spinOnce();
2、spin()
/** * \brief 进入循环处理回调 */
ROSCPP_DECL void spin();
3、二者的比较
**相同点:**二者都用于处理回调函数;
**不同点:**ros::spin() 是进入了循环执行回调函数,而 ros::spinOnce() 只会执行一次回调函数(没有循环),在 ros::spin() 后的语句不会执行到,而 ros::spinOnce() 后的语句可以执行。
Python
def spin():"""进入循环处理回调 """
四、时间函数
ROS中时间相关的API是极其常用,比如:获取当前时刻、持续时间的设置、执行频率、休眠、定时器…都与时间相关。
C++
1、时刻
获取时刻,或是设置指定时刻:
ros::init(argc,argv,"hello_time");
ros::NodeHandle nh;//必须创建句柄,否则时间没有初始化,导致后续API调用失败
ros::Time right_now = ros::Time::now();//将当前时刻封装成对象
ROS_INFO("当前时刻:%.2f",right_now.toSec());//获取距离 1970年01月01日 00:00:00 的秒数
ROS_INFO("当前时刻:%d",right_now.sec);//获取距离 1970年01月01日 00:00:00 的秒数ros::Time someTime(100,100000000);// 参数1:秒数 参数2:纳秒
ROS_INFO("时刻:%.2f",someTime.toSec()); //100.10
ros::Time someTime2(100.3);//直接传入 double 类型的秒数
ROS_INFO("时刻:%.2f",someTime2.toSec()); //100.30
2、持续时间
设置一个时间区间(间隔):
ROS_INFO("当前时刻:%.2f",ros::Time::now().toSec());
ros::Duration du(10);//持续10秒钟,参数是double类型的,以秒为单位
du.sleep();//按照指定的持续时间休眠
ROS_INFO("持续时间:%.2f",du.toSec());//将持续时间换算成秒
ROS_INFO("当前时刻:%.2f",ros::Time::now().toSec());
3、持续时间与时刻运算
为了方便使用,ROS中提供了时间与时刻的运算:
ROS_INFO("时间运算");
ros::Time now = ros::Time::now();
ros::Duration du1(10);
ros::Duration du2(20);
ROS_INFO("当前时刻:%.2f",now.toSec());
//1.time 与 duration 运算
ros::Time after_now = now + du1;
ros::Time before_now = now - du1;
ROS_INFO("当前时刻之后:%.2f",after_now.toSec());
ROS_INFO("当前时刻之前:%.2f",before_now.toSec());//2.duration 之间相互运算
ros::Duration du3 = du1 + du2;
ros::Duration du4 = du1 - du2;
ROS_INFO("du3 = %.2f",du3.toSec());
ROS_INFO("du4 = %.2f",du4.toSec());
//PS: time 与 time 不可以运算
// ros::Time nn = now + before_now;//异常
4、设置运行频率
ros::Rate rate(1);//指定频率
while (true)
{ROS_INFO("-----------code----------");rate.sleep();//休眠,休眠时间 = 1 / 频率。
}
5、定时器
ROS 中内置了专门的定时器,可以实现与 ros::Rate 类似的效果:
ros::NodeHandle nh;//必须创建句柄,否则时间没有初始化,导致后续API调用失败// ROS 定时器/**
* \brief 创建一个定时器,按照指定频率调用回调函数。
*
* \param period 时间间隔
* \param callback 回调函数
* \param oneshot 如果设置为 true,只执行一次回调函数,设置为 false,就循环执行。
* \param autostart 如果为true,返回已经启动的定时器,设置为 false,需要手动启动。
*///Timer createTimer(Duration period, const TimerCallback& callback, bool oneshot = false,// bool autostart = true) const;// ros::Timer timer = nh.createTimer(ros::Duration(0.5),doSomeThing);ros::Timer timer = nh.createTimer(ros::Duration(0.5),doSomeThing,true);//只执行一次// ros::Timer timer = nh.createTimer(ros::Duration(0.5),doSomeThing,false,false);//需要手动启动// timer.start();ros::spin(); //必须 spin
定时器的回调函数:
void doSomeThing(const ros::TimerEvent &event){ROS_INFO("-------------");ROS_INFO("event:%s",std::to_string(event.current_real.toSec()).c_str());
}
Python
1、时刻
获取时刻,或是设置指定时刻:
# 获取当前时刻
right_now = rospy.Time.now()
rospy.loginfo("当前时刻:%.2f",right_now.to_sec())
rospy.loginfo("当前时刻:%.2f",right_now.to_nsec())
# 自定义时刻
some_time1 = rospy.Time(1234.567891011)
some_time2 = rospy.Time(1234,567891011)
rospy.loginfo("设置时刻1:%.2f",some_time1.to_sec())
rospy.loginfo("设置时刻2:%.2f",some_time2.to_sec())# 从时间创建对象
# some_time3 = rospy.Time.from_seconds(543.21)
some_time3 = rospy.Time.from_sec(543.21) # from_sec 替换了 from_seconds
rospy.loginfo("设置时刻3:%.2f",some_time3.to_sec())
2、持续时间
设置一个时间区间(间隔):
# 持续时间相关API
rospy.loginfo("持续时间测试开始.....")
du = rospy.Duration(3.3)
rospy.loginfo("du1 持续时间:%.2f",du.to_sec())
rospy.sleep(du) #休眠函数
rospy.loginfo("持续时间测试结束.....")
3、持续时间与时刻运算
为了方便使用,ROS中提供了时间与时刻的运算:
rospy.loginfo("时间运算")
now = rospy.Time.now()
du1 = rospy.Duration(10)
du2 = rospy.Duration(20)
rospy.loginfo("当前时刻:%.2f",now.to_sec())
before_now = now - du1
after_now = now + du1
dd = du1 + du2
# now = now + now #非法
rospy.loginfo("之前时刻:%.2f",before_now.to_sec())
rospy.loginfo("之后时刻:%.2f",after_now.to_sec())
rospy.loginfo("持续时间相加:%.2f",dd.to_sec())
4、设置运行频率
# 设置执行频率
rate = rospy.Rate(0.5)
while not rospy.is_shutdown():rate.sleep() #休眠rospy.loginfo("+++++++++++++++")
5、定时器
ROS 中内置了专门的定时器,可以实现与 ros::Rate 类似的效果:
#定时器设置
"""
def __init__(self, period, callback, oneshot=False, reset=False):Constructor.@param period: 回调函数的时间间隔@type period: rospy.Duration@param callback: 回调函数@type callback: function taking rospy.TimerEvent@param oneshot: 设置为True,就只执行一次,否则循环执行@type oneshot: bool@param reset: if True, timer is reset when rostime moved backward. [default: False]@type reset: bool
"""
rospy.Timer(rospy.Duration(1),doMsg)
# rospy.Timer(rospy.Duration(1),doMsg,True) # 只执行一次
rospy.spin()
回调函数:
def doMsg(event):rospy.loginfo("+++++++++++")rospy.loginfo("当前时刻:%s",str(event.current_real))
五、其他函数
在发布实现时,一般会循环发布消息,循环的判断条件一般由节点状态来控制,C++中可以通过 ros::ok() 来判断节点状态是否正常,而 python 中则通过 rospy.is_shutdown() 来实现判断,导致节点退出的原因主要有如下几种:
- 节点接收到了关闭信息,比如常用的 ctrl + c 快捷键就是关闭节点的信号;
- 同名节点启动,导致现有节点退出;
- 程序中的其他部分调用了节点关闭相关的API(C++中是ros::shutdown(),python中是rospy.signal_shutdown())
另外,日志相关的函数也是极其常用的,在ROS中日志被划分成如下级别:
- DEBUG(调试):只在调试时使用,此类消息不会输出到控制台;
- INFO(信息):标准消息,一般用于说明系统内正在执行的操作;
- WARN(警告):提醒一些异常情况,但程序仍然可以执行;
- ERROR(错误):提示错误信息,此类错误会影响程序运行;
- FATAL(严重错误):此类错误将阻止节点继续运行。
C++
1、节点状态判断
/** \brief 检查节点是否已经退出** ros::shutdown() 被调用且执行完毕后,该函数将会返回 false** \return true 如果节点还健在, false 如果节点已经火化了。*/
bool ok();
2、节点关闭函数
/*
* 关闭节点
*/
void shutdown();
3、日志函数
ROS_DEBUG("hello,DEBUG"); //不会输出
ROS_INFO("hello,INFO"); //默认白色字体
ROS_WARN("Hello,WARN"); //默认黄色字体
ROS_ERROR("hello,ERROR");//默认红色字体
ROS_FATAL("hello,FATAL");//默认红色字体
Python
1、节点状态判断
def is_shutdown():"""@return: True 如果节点已经被关闭@rtype: bool"""
2、节点关闭函数
def signal_shutdown(reason):"""关闭节点@param reason: 节点关闭的原因,是一个字符串@type reason: str"""
def on_shutdown(h):"""节点被关闭时调用的函数@param h: 关闭时调用的回调函数,此函数无参@type h: fn()"""
3、日志函数
rospy.logdebug("hello,debug") #不会输出
rospy.loginfo("hello,info") #默认白色字体
rospy.logwarn("hello,warn") #默认黄色字体
rospy.logerr("hello,error") #默认红色字体
rospy.logfatal("hello,fatal") #默认红色字体
Reference
http://www.autolabor.com.cn/book/ROSTutorials/di-2-zhang-ros-jia-gou-she-ji/23-fu-wu-tong-xin/224-fu-wu-tong-xin-zi-ding-yi-srv-diao-yong-b-python.html
相关文章:

【ROS学习笔记9】ROS常用API
【ROS学习笔记9】ROS常用API 文章目录【ROS学习笔记9】ROS常用API前言一、 初始化二、 话题与服务相关对象三、 回旋函数四、时间函数五、其他函数Reference写在前面,本系列笔记参考的是AutoLabor的教程,具体项目地址在 这里 前言 ROS的常用API…...

客户关系管理挑战:如何保持客户满意度并提高业绩?
当今,各行业市场竞争愈发激烈,对于保持客户满意度并提高业绩是每个企业都面临的挑战。而客户关系管理则是实现这一目标的关键,因为它涉及到与客户的互动和沟通,以及企业提供优质的产品和服务。在本文中,我们将探讨客户…...
Cartesi 2023 年 2 月回顾
2023年2月28日,通过ETH Denver和Cartesi的在线全球黑客马拉松一起开启黑客马拉松赛季!ETH Denver 正在热火朝天的进行着,我们正在为3月25日开始的首个全球在线黑客马拉松做准备。但这并不是本月发生的所有事情。我们在继续扩展和发展在全世界各地的社区&…...
《爆肝整理》保姆级系列教程python接口自动化测试框架(二十六)--批量执行用例 discover(详解)
简介 我们在写用例的时候,单个脚本的用例好执行,那么多个脚本的时候,如何批量执行呢?这时候就需要用到 unittest 里面的 discover 方法来加载用例了。加载用例后,用 unittest 里面的 TextTestRunner 这里类的 run 方…...

Ubuntu学习篇
前言 环境:Ubuntu 20.4lts Ubuntu系统跟centos还是有很多区别的,笔者之前一直使用的是centos7.x版本。 镜像下载地址:https://ubuntu.com/download/server#downloads 其他版本下载地址:https://launchpad.net/ubuntu/cdmirrors&a…...

extern关键字
1、基本解释: extern可以置于变量或者函数前,以标示变量或者函数的定义在别的文件中,提示编译器遇到此变量和数时在其他模块中寻找其定义。此外extern也可用来进行链接指定。 也就是说extern有两个作用。 第一个,当它与"C"一起…...

T3 出行云原生容器化平台实践
作者:林勇,就职于南京领行科技股份有限公司,担任云原生负责人,也是公司容器化项目的负责人。主要负责 T3 出行云原生生态相关的所有工作,如服务容器化、多 Kubernetes 集群建设、应用混部、降本增效、云原生可观测性基…...

从0开始学python -44
Python3 正则表达式 -2 检索和替换 Python 的re模块提供了re.sub用于替换字符串中的匹配项。 语法: re.sub(pattern, repl,string, count0, flags0)参数: pattern : 正则中的模式字符串。repl : 替换的字符串,也可为一个函数。string : …...

22- estimater使用 (TensorFlow系列) (深度学习)
知识要点 estimater 有点没理解透 数据集是泰坦尼克号人员幸存数据. 读取数据:train_df pd.read_csv(./data/titanic/train.csv) 显示数据特征:train_df.info() 显示开头部分数据:train_df.head() 提取目标特征:y_train tr…...

eKuiper 1.8.0 发布:零代码实现图像/视频流的实时 AI 推理
LF Edge eKuiper 是 Golang 实现的轻量级物联网边缘分析、流式处理开源软件,可以运行在各类资源受限的边缘设备上。eKuiper 的主要目标是在边缘端提供一个流媒体软件框架(类似于 Apache Flink )。eKuiper 的规则引擎允许用户提供基于 SQL 或基…...

[Ansible系列]ansible JinJia2过滤器
目录 一. JinJia2简介 二. JinJia2模板使用 2.1 在play中使用jinjia2 2.2 template模块使用 2.3 jinjia2条件语句 2.4 jinjia2循环语句 2.5 jinjia2过滤器 2.5.1 default过滤器 2.5.2 字符串操作相关过滤器 2.5.3 数字操作相关过滤器 2.5.4 列表操作…...

Cookie、Session、Token区分
一开始接触这三个东西,肯定会被绕的不知道都是干什么的。1、为什么要有它们?首先,由于HTTP协议是无状态的,所谓的无状态,其实就是 客户端每次想要与服务端通信,都必须重新与服务端连接,这就意味…...
回暖!“数”说城市烟火气背后
“人间烟火气,最抚凡人心”。在全国各地政策支持以及企业的积极生产运营下,经济、社会、生活各领域正加速回暖,“烟火气”在城市中升腾,信心和希望正在每个人心中燃起。 发展新阶段,高效统筹经济发展和公共安全&#…...

JS逆向-百度翻译sign
前言 本文是该专栏的第36篇,后面会持续分享python爬虫干货知识,记得关注。 有粉丝留言,近期需要做个翻译功能,考虑到百度翻译语言语种比较全面,但是它的参数被逆向加密了,对于这种情况需要怎么处理呢?所以本文以它为例。 废话不多说,跟着笔者直接往下看正文详细内容。…...
Fiddler抓包之Fiddler过滤器(Filters)调试
Filters:过滤器,帮助我们过滤请求。 如果需要过滤掉与测试项目无关的抓包请求,更加精准的展现抓到的请求,而不是杂乱的一堆,那功能强大的 Filters 过滤器能帮到你。 2、Filters界面说明 fiddler中的过滤 说明&#…...

【xib文件的加载过程 Objective-C语言】
一、xib文件的加载过程: 1.xib文件,是不是在这里啊: View这个文件夹里, 然后呢,我们加载xib是怎么加载的呢, 是不是在控制器里,通过我们这个类方法,加载xib: TestAppView *appView = [TestAppView appView]; + (instancetype)appView{NSBundle *rootBundle = [N…...

react setState学习记录
react setState学习记录1.总体看来2.setState的执行是异步的3.函数式setState1.总体看来 (1). setState(stateChange, [callback])------对象式的setState 1.stateChange为状态改变对象(该对象可以体现出状态的更改) 2.callback是可选的回调函数, 它在状态更新完毕、界面也更新…...

Docker容器cpu利用率问题
1.top原理 top 是读的/proc/stat文件 比如cat /proc/PID/stat 进程的总Cpu时间processCpuTime utime stime cutime cstime,该值包括其所有线程的cpu时间 某一进程Cpu使用率的计算 计算方法: 1 采样两个足够短的时间间隔的cpu快照与进程快照&…...

FreeRTOS入门(06):任务通知
文章目录目的基础说明使用演示作为二进制信号量作为计数信号量作为事件组作为队列或邮箱相关函数总结目的 任务通知(TaskNotify)是RTOS中相对常用的用于任务间交互的功能,这篇文章将对相关内容做个介绍。 本文代码测试环境见前面的文章&…...
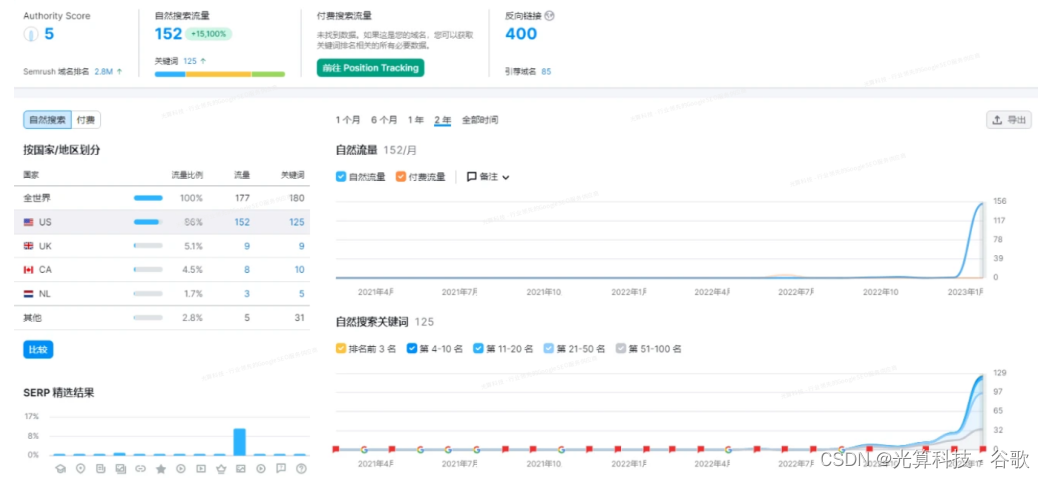
谷歌seo做的外链怎样更快被semrush识别
本文主要分享做谷歌seo外链如何能让semrush工具快速的记录并能查询到。 本文由光算创作,有可能会被剽窃和修改,我们佛系对待这种行为吧。 谷歌seo做的外链怎样更快被semrush识别? 答案是:多使用semrush搜索目标网站可加速爬虫抓…...

基于ASP.NET+ SQL Server实现(Web)医院信息管理系统
医院信息管理系统 1. 课程设计内容 在 visual studio 2017 平台上,开发一个“医院信息管理系统”Web 程序。 2. 课程设计目的 综合运用 c#.net 知识,在 vs 2017 平台上,进行 ASP.NET 应用程序和简易网站的开发;初步熟悉开发一…...

Java 8 Stream API 入门到实践详解
一、告别 for 循环! 传统痛点: Java 8 之前,集合操作离不开冗长的 for 循环和匿名类。例如,过滤列表中的偶数: List<Integer> list Arrays.asList(1, 2, 3, 4, 5); List<Integer> evens new ArrayList…...
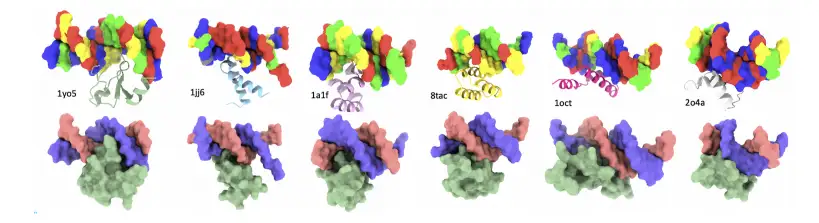
8k长序列建模,蛋白质语言模型Prot42仅利用目标蛋白序列即可生成高亲和力结合剂
蛋白质结合剂(如抗体、抑制肽)在疾病诊断、成像分析及靶向药物递送等关键场景中发挥着不可替代的作用。传统上,高特异性蛋白质结合剂的开发高度依赖噬菌体展示、定向进化等实验技术,但这类方法普遍面临资源消耗巨大、研发周期冗长…...

蓝牙 BLE 扫描面试题大全(2):进阶面试题与实战演练
前文覆盖了 BLE 扫描的基础概念与经典问题蓝牙 BLE 扫描面试题大全(1):从基础到实战的深度解析-CSDN博客,但实际面试中,企业更关注候选人对复杂场景的应对能力(如多设备并发扫描、低功耗与高发现率的平衡)和前沿技术的…...

学校招生小程序源码介绍
基于ThinkPHPFastAdminUniApp开发的学校招生小程序源码,专为学校招生场景量身打造,功能实用且操作便捷。 从技术架构来看,ThinkPHP提供稳定可靠的后台服务,FastAdmin加速开发流程,UniApp则保障小程序在多端有良好的兼…...

页面渲染流程与性能优化
页面渲染流程与性能优化详解(完整版) 一、现代浏览器渲染流程(详细说明) 1. 构建DOM树 浏览器接收到HTML文档后,会逐步解析并构建DOM(Document Object Model)树。具体过程如下: (…...

第25节 Node.js 断言测试
Node.js的assert模块主要用于编写程序的单元测试时使用,通过断言可以提早发现和排查出错误。 稳定性: 5 - 锁定 这个模块可用于应用的单元测试,通过 require(assert) 可以使用这个模块。 assert.fail(actual, expected, message, operator) 使用参数…...

WordPress插件:AI多语言写作与智能配图、免费AI模型、SEO文章生成
厌倦手动写WordPress文章?AI自动生成,效率提升10倍! 支持多语言、自动配图、定时发布,让内容创作更轻松! AI内容生成 → 不想每天写文章?AI一键生成高质量内容!多语言支持 → 跨境电商必备&am…...

Ascend NPU上适配Step-Audio模型
1 概述 1.1 简述 Step-Audio 是业界首个集语音理解与生成控制一体化的产品级开源实时语音对话系统,支持多语言对话(如 中文,英文,日语),语音情感(如 开心,悲伤)&#x…...

汇编常见指令
汇编常见指令 一、数据传送指令 指令功能示例说明MOV数据传送MOV EAX, 10将立即数 10 送入 EAXMOV [EBX], EAX将 EAX 值存入 EBX 指向的内存LEA加载有效地址LEA EAX, [EBX4]将 EBX4 的地址存入 EAX(不访问内存)XCHG交换数据XCHG EAX, EBX交换 EAX 和 EB…...