《opencv实用探索·十一》opencv之Prewitt算子边缘检测,Roberts算子边缘检测和Sobel算子边缘检测
1、前言
边缘检测:
图像边缘检测是指在图像中寻找灰度、颜色、纹理等变化比较剧烈的区域,它们可能代表着物体之间的边界或物体内部的特征。边缘检测是图像处理中的一项基本操作,可以用于人脸识别、物体识别、图像分割等多个领域。
边缘检测实质上是计算当前点和周围点灰度的差别。
图像边缘检测流程主要分为以下几个步骤:
(1)读取待处理图像;
(1)图像滤波,例如使用高斯滤波器,平滑图像,去除噪声;
(2)计算图像中每个像素点的梯度强度和方向;
(3)应用非极大值抑制(Non-Maximum Suooression),保留梯度方向上的局部最大值,抑制非边缘点,消除边缘检测带来的杂散响应;
(4)应用双阈值(Double-Threshold)检测来确定真实的和潜在的边缘,即将梯度幅值映射到两个阈值,根据梯度值高于高阈值或在高低阈值之间的情况,将像素标记为强边缘、弱边缘或非边缘。
(5)边缘连接,通过连接相邻的强边缘像素和与之相连的弱边缘像素,形成最终的边缘图像;
(6)显示结果。
在介绍各种边缘检测算子之前先简单阐述下怎么寻找边缘。
下面左图是一张黑白相间的图,右图是左图的每个像素的灰度值
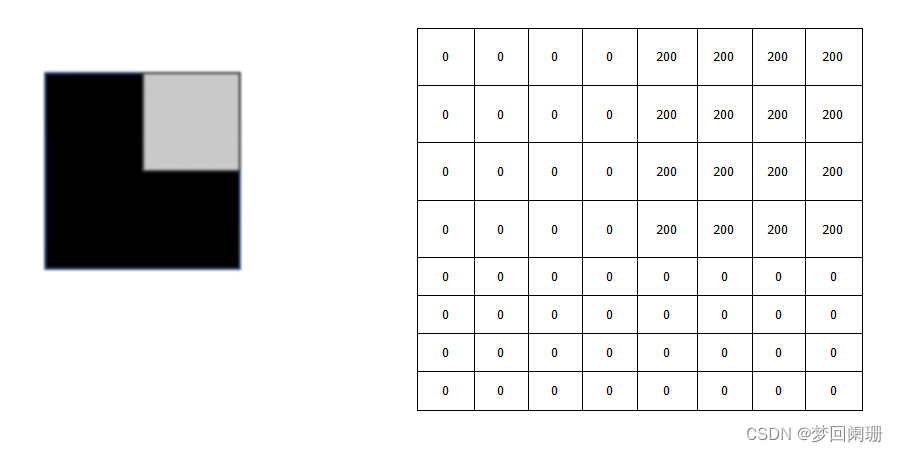
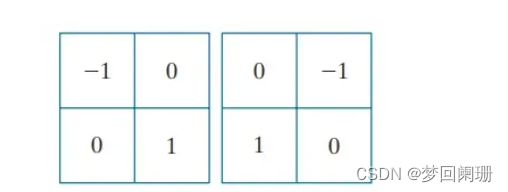
我们设定一个卷积核如下(关于卷积的介绍请看之前的文章):

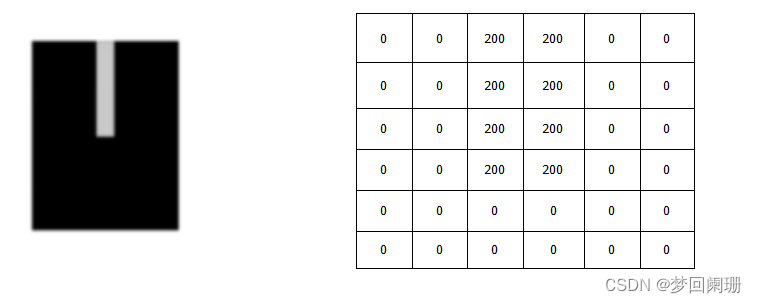
原图在通过卷积核进行卷积计算后得到的图像如下:
可以看到原图在卷积运算后黑色向白色突变的边缘被很好的保留了下来,因此可以通过这个卷积核找到图像中垂直的边缘。
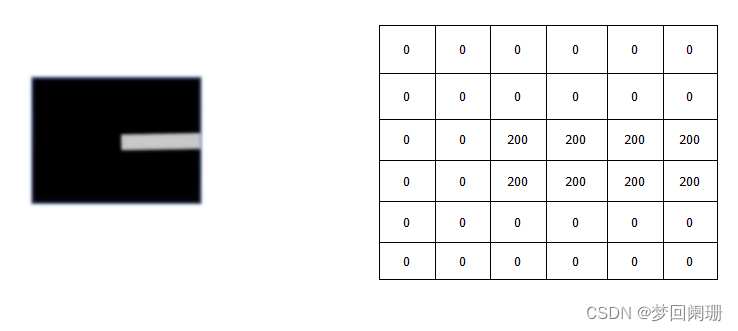
同理,如果我们用下面的卷积核也可以找到图像中水平的边缘。

卷积运算后:
2、Prewitt算子边缘检测
如果我们把上面两个卷积核组合起来再对图像进行卷积便可以同时找到图像中水平和垂直的边缘,这种卷积核就是prewitt算子。

标准的 Prewitt 边缘检测算子由以下两个卷积核组成。

下面是用prewitt算子进行边缘检测的案例:
#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>using namespace cv;int main() {// 读取图像Mat image = imread("your_image.jpg", IMREAD_GRAYSCALE);// 定义Prewitt算子Mat prewitt_x = (Mat_<float>(3, 3) << -1, 0, 1, -1, 0, 1, -1, 0, 1);Mat prewitt_y = (Mat_<float>(3, 3) << -1, -1, -1, 0, 0, 0, 1, 1, 1);// 对图像应用Prewitt算子Mat edges_x, edges_y;filter2D(image, edges_x, CV_64F, prewitt_x);filter2D(image, edges_y, CV_64F, prewitt_y);// 计算梯度幅值和方向Mat gradient_magnitude, gradient_direction;magnitude(edges_x, edges_y, gradient_magnitude);phase(edges_x, edges_y, gradient_direction, true);// 归一化梯度幅值cv::normalize(gradient_magnitude, gradient_magnitude, 0, 1, cv::NORM_MINMAX);// 显示结果imshow("Original Image", image); //原灰度图imshow("Gradient Magnitude", gradient_magnitude); //prewitt算子边缘检测图waitKey(0);destroyAllWindows();return 0;
}代码解读:
(1)在代码中我们先分别定义一个水平方向和垂直方向的prewitt算子edges_x和edges_y
(2)filter2D是对图像进行卷积操作,即获取prewitt算子与原图像卷积后的图像edges_x和edges_y
(3)magnitude 函数的主要用途是计算两个输入数组的逐元素平方和的平方根。在图像处理中,常常用于计算图像中每个像素点的梯度幅值。相位(Phase)在图像处理中通常指的是梯度的方向(边缘方向)。在梯度计算中,梯度向量的方向表示图像在该点上灰度变化最快的方向。在梯度计算中,通常使用 magnitude 函数计算梯度的幅值,使用 phase 函数计算梯度的方向。这两个信息一起构成了梯度向量,提供了有关图像局部变化的重要信息。
(4)最后归一化梯度幅值图像,因为64位图像显示范围为0-1。
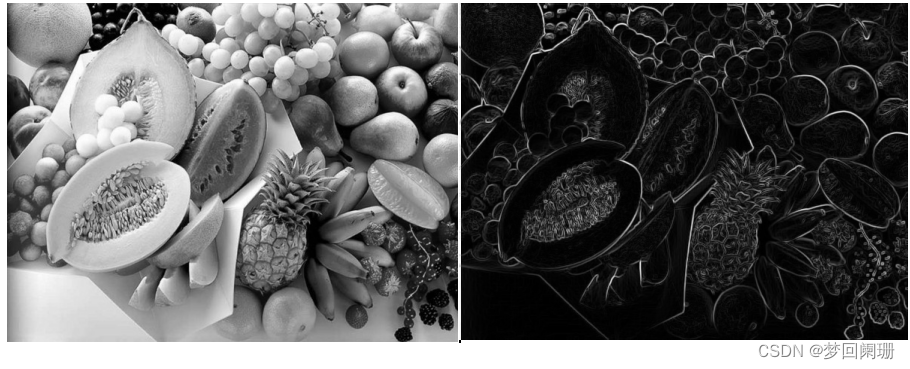
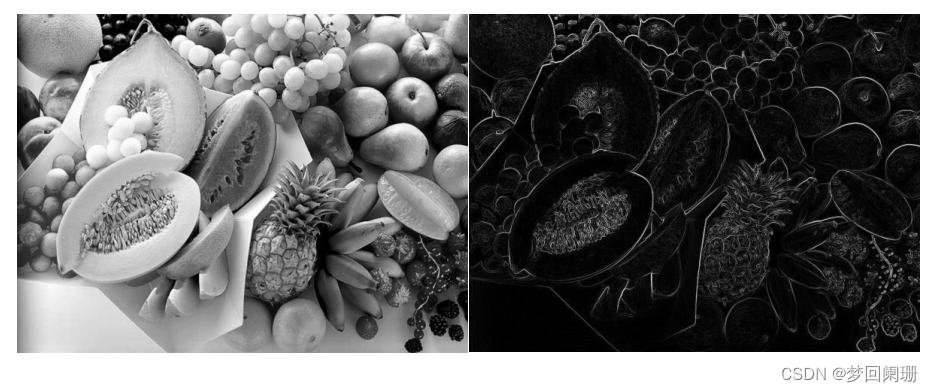
最后效果如下(左边是原灰度图,右边是边缘检测出的图像):
3、Roberts算子
常用来处理具有陡峭的低噪声图像,当图像边缘接近于正45度或负45度时,该算法处理效果更理想。其缺点是对边缘的定位不太准确,提取的边缘线条较粗。
下图左边为水平方向Roberts算子,也称正对角算子。右边为垂直方向Roberts算子,也称斜对角算子。
下面是Roberts算子的使用案例:
#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>int main() {// 生成一个简单的图像cv::Mat image = cv::Mat::zeros(100, 100, CV_8U);cv::rectangle(image, cv::Rect(20, 20, 60, 60), cv::Scalar(255), cv::FILLED);// 定义Sobel算子cv::Mat sobel_x = (cv::Mat_<float>(3, 3) << -1, 0, 1, -2, 0, 2, -1, 0, 1);cv::Mat sobel_y = (cv::Mat_<float>(3, 3) << -1, -2, -1, 0, 0, 0, 1, 2, 1);// 应用Sobel算子cv::Mat edges_x, edges_y;cv::filter2D(image, edges_x, CV_64F, sobel_x);cv::filter2D(image, edges_y, CV_64F, sobel_y);// 计算梯度幅值和方向cv::Mat gradient_magnitude, gradient_direction;cv::magnitude(edges_x, edges_y, gradient_magnitude);cv::phase(edges_x, edges_y, gradient_direction, true); // true 表示计算角度的弧度值// 归一化梯度方向到[0, 1]范围cv::normalize(gradient_direction, gradient_direction, 0, 1, cv::NORM_MINMAX);// 显示结果cv::imshow("Original Image", image);cv::imshow("Gradient Magnitude", gradient_magnitude);cv::imshow("Gradient Direction", gradient_direction);cv::waitKey(0);cv::destroyAllWindows();return 0;
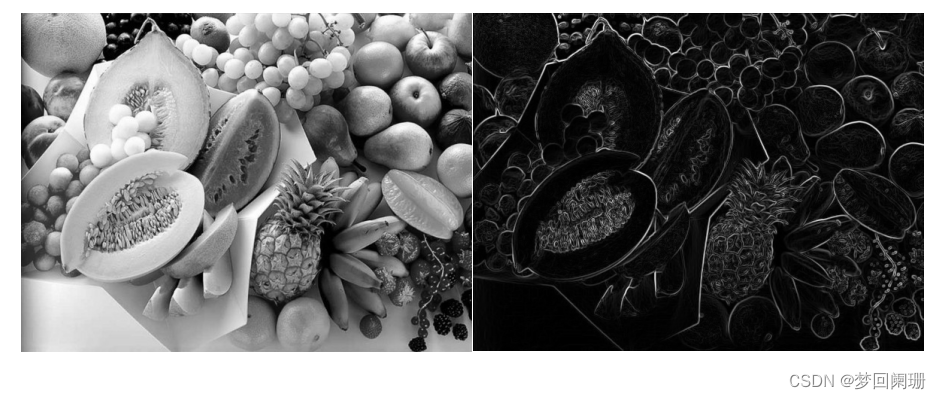
}最后效果如下(左边是原灰度图,右边是边缘检测出的图像):
4、Sobel算子边缘检测
Sobel算子在Prewitt算子的基础上增加了权重的概念,认为相邻点的距离远近对当前像素点的影响是不同的,距离越近的像素点对应当前像素的影响越大,从而实现图像锐化并突出边缘轮廓。但Sobel算子并不是基于图像灰度进行处理的,因为Sobel算子并没有严格地模拟人的视觉生理特性,因此图像轮廓的提取有时并不能让人满意。当对精度要求不是很高时,Sobel算子是一种较为常用的边缘检测方法。
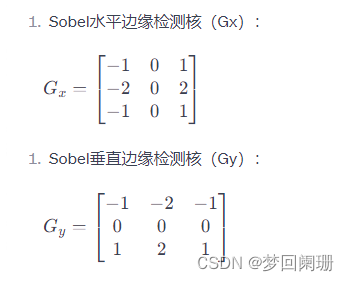
它的水平和垂直方向的卷积核如下:
接口说明:
void cv::Sobel(InputArray src,OutputArray dst,int ddepth,int dx,int dy,int ksize = 3,double scale = 1,double delta = 0,int borderType = cv::BORDER_DEFAULT
);
src: 输入图像。可以是单通道(灰度图)或多通道图像。
dst: 输出图像,梯度的计算结果将存储在这里。
ddepth: 输出图像的深度,通常使用 CV_64F 或 CV_32F 表示。
dx: x方向上的导数阶数,设为1表示在水平方向上进行操作。
dy: y方向上的导数阶数,设为1表示在垂直方向上进行操作。
ksize: Sobel核的大小。默认为 3,表示一个 3x3 的核。通常使用奇数值。
scale: 可选的比例因子,用于调整梯度的幅值,也表示对比度。
delta: 可选的偏移值,用于调整输出图像的亮度。
borderType: 边界处理类型,可以使用 cv::BORDER_DEFAULT 或其他合适的边界处理标志。
Sobel算子边缘检测案例:
#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>int main() {// 读取图像cv::Mat image = cv::imread("your_image.jpg", cv::IMREAD_GRAYSCALE);if (image.empty()) {std::cerr << "Error: Could not read the image." << std::endl;return -1;}// 应用Sobel算子cv::Mat edges_x, edges_y;cv::Sobel(image, edges_x, CV_64F, 1, 0, 3); // 1表示在水平方向上进行操作cv::Sobel(image, edges_y, CV_64F, 0, 1, 3); // 1表示在垂直方向上进行操作// 计算梯度幅值cv::Mat gradient_magnitude;cv::magnitude(edges_x, edges_y, gradient_magnitude);// 归一化梯度方向到[0, 1]范围cv::normalize(gradient_magnitude, gradient_magnitude, 0, 1, cv::NORM_MINMAX);// 显示结果cv::imshow("Original Image", image);cv::imshow("Sobel Edges X", edges_x);cv::imshow("Sobel Edges Y", edges_y);cv::imshow("Gradient Magnitude", gradient_magnitude);cv::waitKey(0);cv::destroyAllWindows();return 0;
}

相关文章:
《opencv实用探索·十一》opencv之Prewitt算子边缘检测,Roberts算子边缘检测和Sobel算子边缘检测
1、前言 边缘检测: 图像边缘检测是指在图像中寻找灰度、颜色、纹理等变化比较剧烈的区域,它们可能代表着物体之间的边界或物体内部的特征。边缘检测是图像处理中的一项基本操作,可以用于人脸识别、物体识别、图像分割等多个领域。 边缘检测…...
prime靶机打靶记录
靶机下载地址 https://download.vulnhub.com/prime/Prime_Series_Level-1.rar nmap搜索目标 使用nmap -sn 192.168.41.0/24找到目标靶机192.168.41.136 扫描端口,因为是靶机,所以速率直接调了10000 扫出来两个端口22和80,进行详细的扫描 没…...

树莓派,linux换清华源
清华源网址 https://mirrors.tuna.tsinghua.edu.cn/help/raspbian/ 更换软件源 鉴于国内网络环境下载各大镜像,软件包速度慢的问题,需要更换软件源,以防下载慢,且在本教程中,统一更换为清华源。 2.3.1 更换树莓派软…...

公有云迁移研究——AWS DMS
大纲 1 什么是DMS2 DMS的作用3 DMS在迁移的时候都做些什么4 在使用DMS的时候我们需要做些什么5 操作5.1 创建两个数据库终端节点5.2 创建迁移任务 6 可能遇到的问题7 总结 在本地机房或其他云往AWS上做迁移时,往往会遇到数据库迁移的任务。如果数据量不是特别大&…...

一起学docker系列之十七Docker Compose 与手动操作的比较与优势分析
目录 1 前言2 不使用 Docker Compose2.1 启动 MySQL 容器2.2 启动 Redis 容器2.3 启动微服务容器 3 使用 Docker Compose4 使用 Docker Compose 的优势5 结语参考地址 1 前言 在当今容器化应用的开发与部署中,容器编排工具的选择对于简化流程、提高效率至关重要。本…...
IP地址定位不准确的情况研究
在互联网的浩瀚海洋中,每一台连接到网络的设备都被赋予了一个独特的标识符,这就是IP地址。它就像是我们在线身份的一部分,帮助我们与他人进行通信,获取信息,以及享受各种网络服务。然而,由于各种原因&#…...
武汉凯迪正大KDZD5289硫化曲线测试仪(电脑无转子硫化仪)
电脑无转子硫化仪 硫化时间测试仪 硫化曲线仪 硫化曲线测试仪 武汉凯迪正大KDZD5289产品概述 KDZD5289硫化曲线测试仪(电脑无转子硫化仪)采用电脑控制进口温控仪进行准确控温,计算机适时进行数据处理并可进行统计、分析、存储对比等ÿ…...

Topic和Partition
作用 主题作为消息的一级分类, 分区是对二级分类。分区是Kafka可伸缩性和水平扩展的关键, 也是多副本机制保证可用性的基础。分区可以有一到多个副本, 每个副本对应1个日志文件, 每个日志文件对应1到多个日志分段。每个日志分段又可以细分为日志文件, 索引文件和快照文件。 创…...

算法通关村第十四关|黄金挑战|数据流的中位数
数据流的中位数 原题:力扣295. 设计一种数据结构可以支持添加整数和返回中位数的操作。 之前写过找中间用两个堆,这道题就可以使用一个大顶堆和一个小顶堆。 大顶堆存储比较小的元素,小顶堆存储比较大的元素。 class MedianFinder {Prio…...
挑选数据可视化工具:图表类型、交互功能与数据安全
作为一名数据分析师,我经常需要使用各种数据可视化工具来将数据以直观、清晰的方式呈现出来,以便更好地理解和分析。在市面上的众多可视化工具中,我根据实际需求和项目特点进行选择。本文将从以下几个角度对市面上的数据可视化工具进行对比&a…...

华纳云:有效解决服务器宕机的办法
服务器宕机可能是由多种原因引起的,包括硬件故障、软件问题、网络问题等。以下是一些简单的解决服务器宕机问题的办法: 检查硬件连接: 确保服务器的所有硬件连接正常。检查电源线、网络连接、存储设备连接等,确保没有松动或断开的…...

坦克大战-部分
通过键盘操控坦克移动,转弯,射击 消灭所有敌人可以过关 23个类,3个gif图片 wsad控制移动 j射击 砖墙限制移动,可以打穿;铁墙,限制移动,不能打穿;水&#x…...

OracleRac跨网段修改Public IP/VIP/Private IP/Scan IP
本验证于测试环境,生产操作需谨慎 现为测试环境,机器有且仅有两个网卡存在,需求修改Public IP/VIP/Private IP/Scan IP,把Public IP/VIP/Scan IP的网段改为Private IP的网段,Private IP于Public IP网段互换。 先停掉两…...

使用Pytorch从零开始实现BERT
生成式建模知识回顾: [1] 生成式建模概述 [2] Transformer I,Transformer II [3] 变分自编码器 [4] 生成对抗网络,高级生成对抗网络 I,高级生成对抗网络 II [5] 自回归模型 [6] 归一化流模型 [7] 基于能量的模型 [8] 扩散模型 I, 扩散模型 II…...

Python爬虫-新能源汽车销量榜
前言 本文是该专栏的第11篇,后面会持续分享python爬虫案例干货,记得关注。 本文以懂车平台的新能源汽车销量榜单为例,获取各车型的销量排行榜单数据。具体实现思路和详细逻辑,笔者将在正文结合完整代码进行详细介绍。 废话不多说,跟着笔者直接往下看正文详细内容。(附带…...

外包干了8个月,技术退步明显.......
先说一下自己的情况,大专生,18年通过校招进入武汉某软件公司,干了接近4年的功能测试,今年年初,感觉自己不能够在这样下去了,长时间呆在一个舒适的环境会让一个人堕落! 而我已经在一个企业干了四年的功能测…...
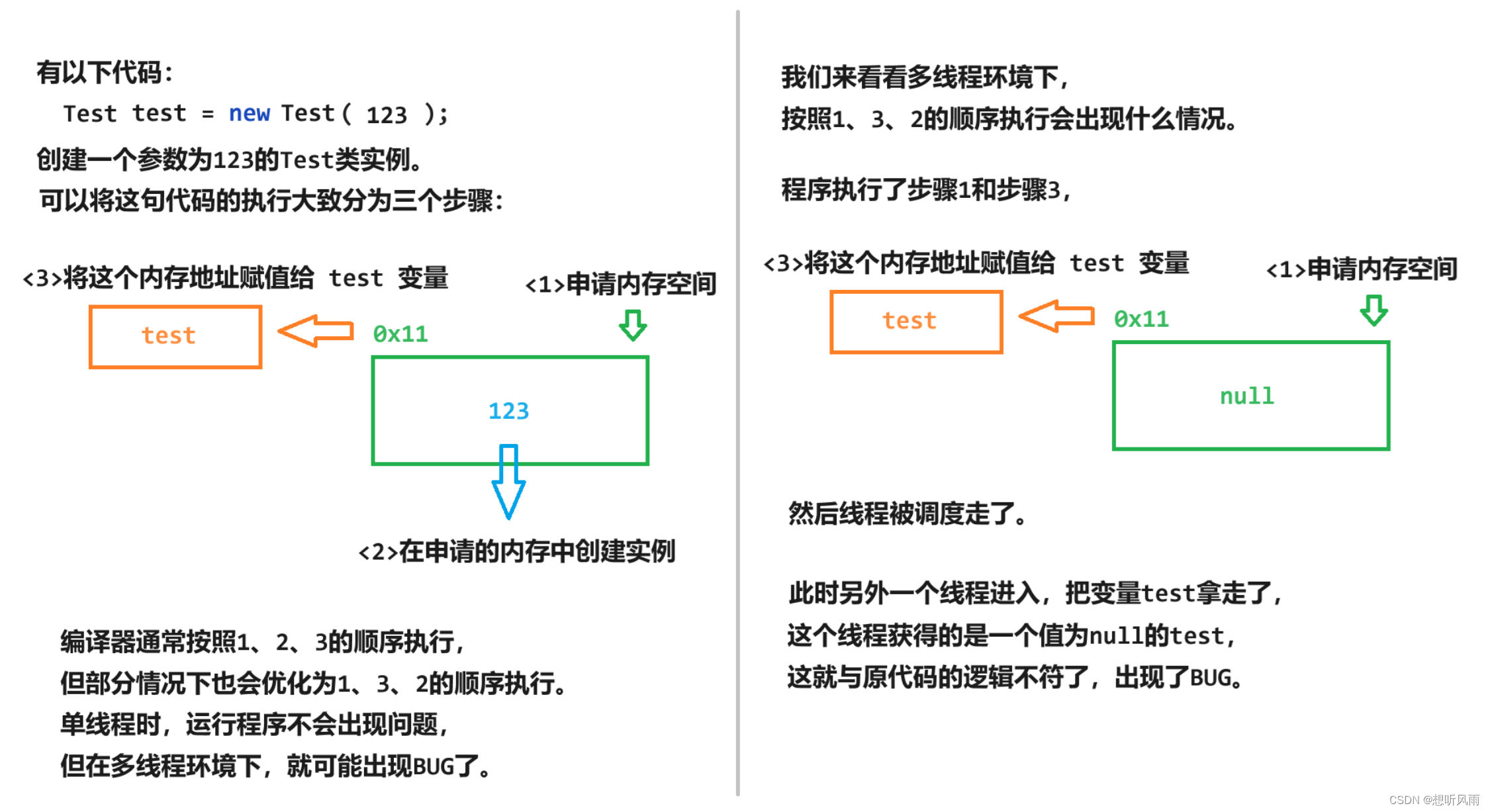
<JavaEE> volatile关键字 -- 保证内存可见性、禁止指令重排序
目录 一、内存可见性 1.1 Java内存模型(JMM) 1.2 内存可见性演示 二、指令重排序 三、关键字 volatile 一、内存可见性 1.1 Java内存模型(JMM) 1)什么是Java内存模型(JMM)?Java内存模型即Java Memory Model,简…...

docker安装mysql8
docker安装mysql8 docker search mysql:8 #搜索可以使用的msyql8的镜像 docker pull mysql:8.0.27 #拉去mysql8的镜像 创建挂载的宿主机目录 mkdir -p /data/mysql/mysql8/conf # 配置文件目录 mkdir -p /data/mysql/mysql8/data # 数据目录 touch /data/mysql/mysql8/conf/my.…...

消息丢失排查方法?
遇到丢消息问题,如果是单聊,群聊,聊天室,系统消息可以在开发者后台北极星自助查询一下消息是否发送成功。根据您实际发送的相关信息(发送者、接收者、时间、消息 ID ……)看是否可以查到消息 如果消息查不到…...
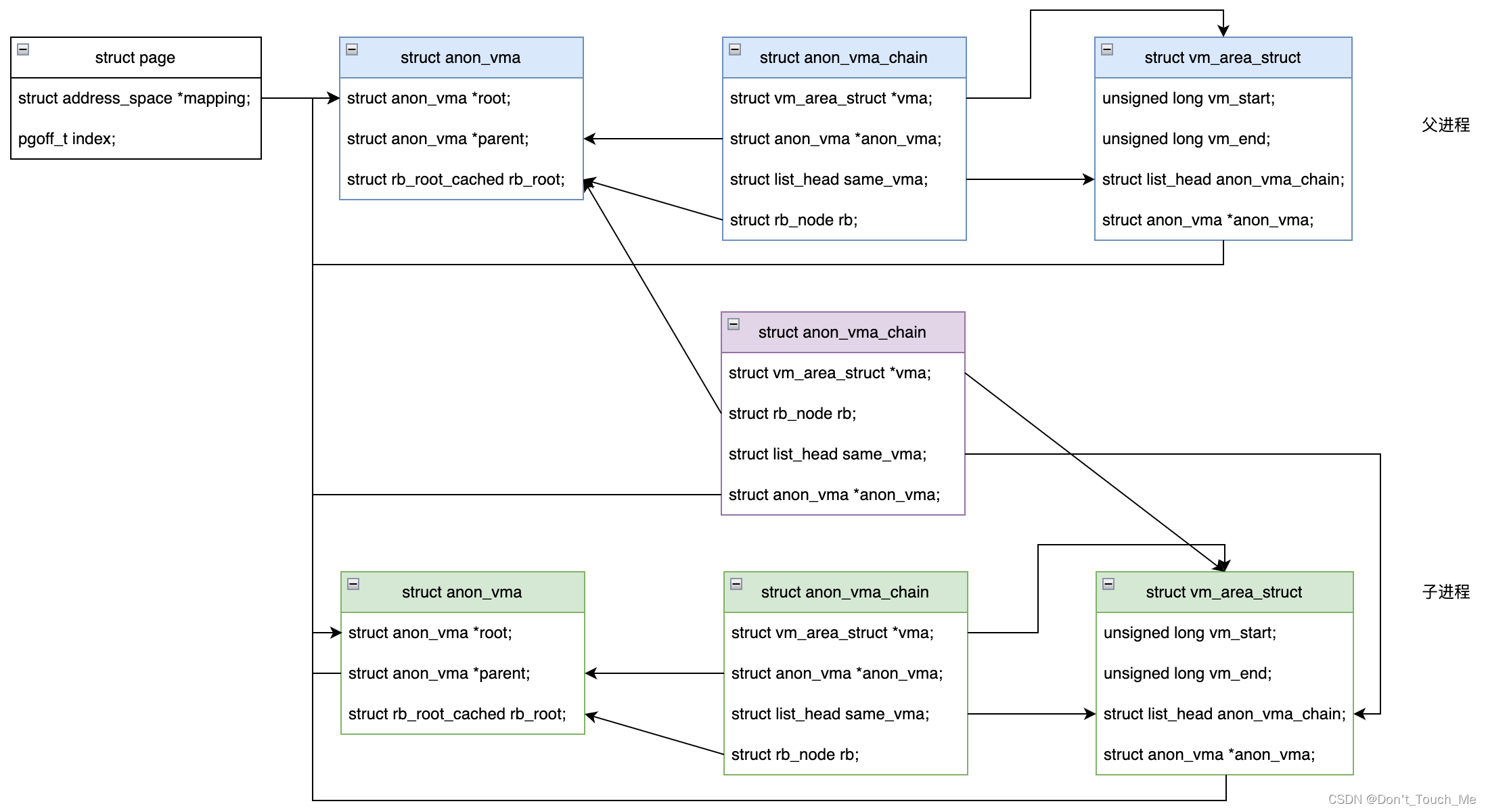
Linux 匿名页反向映射
1. 何为反向映射 正向映射: 用户进程在申请内存时,内核并不会立刻给其分配物理内存,而是先为其分配一段虚拟地址空间,当进程访问该虚拟地址空间时,触发page fault异常,异常处理流程中会为其分配物理页面&am…...

ISIS实验1
ISIS实验1网络拓扑配置一、AR1二、AR2三、测试1. 查看 IS-IS 邻居状态2. 查看 IS-IS 接口信息3. 查看 IS-IS 路由表4. 查看 IP 路由表中的 IS-IS 路由5. 查看链路状态数据库(LSDB)6. 检查:Level-1 区域一致性四、AR3五、AR4六、检测1. 通过链…...

PlatformIO环境下ESP32-S3与N16R8开发板配置全攻略
1. 为什么选择PlatformIO开发ESP32-S3? 很多刚接触ESP32-S3的开发者会纠结:到底用Arduino IDE还是PlatformIO?我刚开始用Arduino IDE,后来切换到PlatformIO就再也没回去过。PlatformIO有三大杀手锏:跨平台支持…...

提升开发效率:用快马一键生成快速排序多版本性能对比工具
今天在优化一个数据处理模块时,遇到了需要选择合适排序算法的问题。不同数据特征下,快速排序的各种变体表现差异很大,手动测试效率实在太低。于是我用InsCode(快马)平台快速搭建了一个性能对比工具,整个过程比想象中简单很多。 需…...
)
基于springboot图书综合服务平台设计与开发(源码+精品论文+答辩PPT等资料)
博主介绍:CSDN毕设辅导第一人、靠谱第一人、全网粉丝50W,csdn特邀作者、博客专家、腾讯云社区合作讲师、CSDN新星计划导师、Java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和学生毕业项目实战,高校老师/讲师/同行前辈交…...

2026年小学英语学习小程序排行榜
对于小学生而言,英语学习早已打破“只背单词、只刷习题”的单一模式,听、说、读、写全方位同步训练,才是提升英语能力的关键。2026年,市面上涌现出多款优质小学英语学习小程序,覆盖单词记忆、听力训练、阅读提升、语法…...

如何快速搭建个人小说离线图书馆:fanqienovel-downloader完整使用指南
如何快速搭建个人小说离线图书馆:fanqienovel-downloader完整使用指南 【免费下载链接】fanqienovel-downloader 下载番茄小说 项目地址: https://gitcode.com/gh_mirrors/fa/fanqienovel-downloader 厌倦了在线小说的网络限制和广告干扰?想要随时…...

深入理解Matplotlib中的plt、fig、axes与axis:从基础到高级应用
1. Matplotlib绘图基础:从plt到figure的认知跃迁 第一次接触Matplotlib时,最让人困惑的就是plt.plot()和ax.plot()到底有什么区别。这就像学做菜时,有人告诉你"用锅炒菜"和"先用电磁炉加热再放锅炒菜"两种方式都能做出青…...

LeagueAkari终极指南:智能游戏辅助工具快速上手与深度配置
LeagueAkari终极指南:智能游戏辅助工具快速上手与深度配置 【免费下载链接】League-Toolkit 兴趣使然的、简单易用的英雄联盟工具集。支持战绩查询、自动秒选等功能。基于 LCU API。 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 你是否曾在…...

SEO_避开这些常见误区让你的SEO效果事半功倍
<h2>SEO误区一:忽视关键词优化</h2> <p>在进行SEO优化时,关键词的选择和使用是至关重要的。很多人忽视了关键词优化,导致他们的网站在搜索引擎中的排名一直停滞不前。关键词不仅仅是为了让搜索引擎理解你的网站内容&#x…...

运维提效实战:用 Ansible+Cron 搞定日志自动清理,再也不用半夜爬起来删日志了
前言 作为常年和服务器打交道的运维人,估计没人没经历过半夜被磁盘爆满告警吵醒的崩溃 —— 远程登服务器、挨个找日志文件、手动删旧日志,一套操作下来人彻底清醒,回头还得担心误删关键文件。 其实这类重复又机械的运维活儿,完全…...