如何快速移植(从STM32F103到STM32F407)
最近用到F4的地方比较多,网上代码还是F1多一些,便需要移植代码,如何快速移植代码呢?
看下面这篇文章
外设
首先就是STM32的外设了。
STM32F407ZGT6的基本外设
STM32F407ZGT6 作为 MCU,该芯片是
STM32F407 里面配置非常强大的了,它拥有的资源包括:集成 FPU 和 DSP 指令,并具有 192KB
SRAM、1024KB FLASH、12 个 16 位定时器、2 个 32 位定时器、2 个 DMA 控制器(共 16 个通道)、3 个 SPI、2 个全双工 I2S、3 个 IIC、6 个串口、2 个 USB(支持 HOST /SLAVE)、2 个CAN、3 个 12 位 ADC、2 个 12 位 DAC、1 个 RTC(带日历功能)、1 个 SDIO 接口、1 个 FSMC接口、1 个 10/100M 以太网 MAC 控制器、1 个摄像头接口、1 个硬件随机数生成器、以及 112个通用 IO 口等。该芯片的配置十分强悍,很多功能相对 STM32F1 来说进行了重大改进,比如
FSMC 的速度,F4 刷屏速度可达 3300W 像素/秒,而 F1 的速度则只有 500W 左右。
STM32F103ZET6的基本外设
STM32F103ZETT6 作为 MCU,该芯片是
STM32F103 里面配置非常强大的了,它拥有的资源包括:64KB SRAM、512KB FLASH、2 个基本定时器、4 个通用定时器、2 个高级定时器、2 个 DMA 控制器(共 12 个通道)、3 个 SPI、2 个 IIC、5 个串口、1 个 USB、1 个 CAN、3 个 12 位 ADC、1 个 12 位 DAC、1 个 SDIO 接口、1 个 FSMC 接口以及 112 个通用 IO 口。该芯片的配置十分强悍,并且还带外部总线(FSMC)
可以用来外扩 SRAM 和连接 LCD 等,通过 FSMC 驱动 LCD,可以显著提高 LCD 的刷屏速度,是 STM32F1 家族常用型号里面,最高配置的芯片了
然后是比较重要的一个功能。
时钟
为什么说时钟重要呢,在做SPI或者一些对时的时候,这个时候时钟的重要性就突显出来了。
F407的时钟
SYSCLK(系统时钟) =168MHz
AHB 总线时钟(HCLK=SYSCLK) =168MHz
APB1 总线时钟(PCLK1=SYSCLK/4) =42MHz
APB2 总线时钟(PCLK2=SYSCLK/2) =84MHz
PLL 主时钟 =168MHz
F103的时钟
SYSCLK(系统时钟) =72MHz
AHB 总线时钟(使用 SYSCLK) =72MHz
APB1 总线时钟(PCLK1=SYSCLK/2) =36MHz
APB2 总线时钟(PCLK2) =72MHz
PLL 时钟 =72MHz
IO的配置
1、输入浮空
2、输入上拉
3、输入下拉
4、模拟输入
5、开漏输出
6、推挽输出
7、推挽式复用功能
8、开漏式复用功能
模式就不用说了,这个大家应该都知道,重要的是如何配置。
F407
一定要注意使能IO口时钟,而且要写对 博主就踩了几次坑
使能 IO 口时钟。调用函数为 RCC_AHB1PeriphClockCmd ()
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);//使能GPIOF时钟
初始化 IO 参数。调用函数 GPIO_Init();GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//普通输出模式GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHzGPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉GPIO_Init(GPIOF, &GPIO_InitStructure);//初始化GPIO
上面的是输出配置,下面看一下输入配置,大家可以比较一下。
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;//普通输入模式GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MGPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉GPIO_Init(GPIOE, &GPIO_InitStructure);//初始化GPIOE2,3,4
F103
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置成上拉输入
GPIO_Init(GPIOE, &GPIO_InitStructure);//初始化GPIOE4,3
然后我们看一下不同点
首先F4的io的时钟挂载在AHB1下,调用
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);//使能GPIOF时钟其次
typedef struct
{uint32_t GPIO_Pin;GPIOMode_TypeDef GPIO_Mode;GPIOSpeed_TypeDef GPIO_Speed;GPIOOType_TypeDef GPIO_OType;//配置输出模式 GPIOPuPd_TypeDef GPIO_PuPd; //上下拉的配置
}GPIO_InitTypeDef;typedef enum
{ GPIO_PuPd_NOPULL = 0x00,GPIO_PuPd_UP = 0x01,GPIO_PuPd_DOWN = 0x02
}GPIOPuPd_TypeDef;f4能在GPIO_Init配置时就配置引脚的上下拉高低电平typedef enum
{ GPIO_OType_PP = 0x00,GPIO_OType_OD = 0x01
}GPIOOType_TypeDef;f4配置了输出后专门可以选择配置开漏输出和推挽输出,也就是比103分的更细一些了f4的速度最高可以配置为100mhz 103只有50mhz
NVIC
首先两者都要在main函数里面设置中断优先级的分组,且只设置一次设置了就别改了避免发生错误NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
F407
STM32F40xx/STM32F41xx 的 92 个中断里面,包括 10 个内核中断和 82 个可屏蔽中断,具
有 16 级可编程的中断优先级,而我们常用的就是这 82 个可屏蔽中断
F103
说了 CM3 内核支持 256 个中断,这里用 8 个 32 位寄存器来控制,每个位控制一个中断。但是
STM32F103 的可屏蔽中断只有 60 个
他们NVIC的配置是一样的
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口 1 中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1 ;// 抢占优先级为 1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;// 子优先级位 2
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ 通道使能
NVIC_Init(&NVIC_InitStructure); //根据上面指定的参数初始化 NVIC 寄存器
外部中断
他们之间的中断服务函数都是一样的
EXTI0_IRQHandler
EXTI1_IRQHandler
EXTI2_IRQHandler
EXTI3_IRQHandler
EXTI4_IRQHandler
EXTI9_5_IRQHandler
EXTI15_10_IRQHandler
F407
STM32F407 的中断控制器支持 22
个外部中断/事件请求。每个中断设有状态位,每个中断/事件都有独立的触发和屏蔽设置。
STM32F407 的 22 个外部中断为:
EXTI 线 0~15:对应外部 IO 口的输入中断。
EXTI 线 16:连接到 PVD 输出。
EXTI 线 17:连接到 RTC 闹钟事件。
EXTI 线 18:连接到 USB OTG FS 唤醒事件。
EXTI 线 19:连接到以太网唤醒事件。
EXTI 线 20:连接到 USB OTG HS(在 FS 中配置)唤醒事件。
EXTI 线 21:连接到 RTC 入侵和时间戳事件。
EXTI 线 22:连接到 RTC 唤醒事件。STM32F4 供 IO 口使用的中断线只有 16 个
配置步骤
使能SYSCFG时钟: RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);
初始化IO口为输入。GPIO_Init();
设置IO口与中断线的映射关系。void SYSCFG_EXTILineConfig();
初始化线上中断,设置触发条件等。EXTI_Init();
配置中断分组(NVIC),并使能中断。NVIC_Init();
编写中断服务函数。EXTIx_IRQHandler();
清除中断标志位EXTI_ClearITPendingBit();
实例
一定要注意这里
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);//使能SYSCFG时钟
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOE, EXTI_PinSource3);//PE3 连接到中断线3
这两个是不一样的,F4是使能SYSCFG时钟来配置中断
NVIC_InitTypeDef NVIC_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);//使能SYSCFG时钟
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOE, EXTI_PinSource3);//PE3 连接到中断线3EXTI_InitStructure.EXTI_Line =EXTI_Line3EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//中断事件EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //下降沿触发EXTI_InitStructure.EXTI_LineCmd = ENABLE;//中断线使能EXTI_Init(&EXTI_InitStructure);//配置NVIC_InitStructure.NVIC_IRQChannel = EXTI3_IRQn;//外部中断3NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02;//抢占优先级2NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x02;//子优先级2NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能外部中断通道NVIC_Init(&NVIC_InitStructure);//配置
中断服务格式
void EXTI3_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line3)!=RESET)//判断某个线上的中断是否发生
{ …中断逻辑…
EXTI_ClearITPendingBit(EXTI_Line3); //清除 LINE 上的中断标志位
}
}F103
初始化IO口为输入。GPIO_Init();开启IO口复用时钟。RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
设置IO口与中断线的映射关系。void GPIO_EXTILineConfig();
初始化线上中断,设置触发条件等。EXTI_Init();
配置中断分组(NVIC),并使能中断。NVIC_Init();
编写中断服务函数。EXTIx_IRQHandler();
清除中断标志位EXTI_ClearITPendingBit();
实例
io初始化省略
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
//使能复用功能时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //配置 GPIO 与中断线的映射关系
//void GPIO_EXTILineConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource)GPIO_EXTILineConfig(GPIO_PortSourceGPIOE,GPIO_PinSource3);
将中断线 3 与 GPIOE 映射起来,那么很显然是 GPIOE.3 与 EXTI3 中断线连接了//初始化线上中断,设置触发条件等
EXTI_InitStructure.EXTI_Line=EXTI_Line3; //设置中断线的标号
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //中断模式
//有两个模式中断和事件可选这里是中断
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;//设置触发方式
//设置触发方式,有上升沿和下降沿,还有双边沿,这里配置的是下降沿
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure); //根据EXTI_InitStruct中指定的参数初始化外设EXTI寄存器//配置中断分组(NVIC),并使能中断
NVIC_InitStructure.NVIC_IRQChannel = EXTI3_IRQn; //使能外部中断通道NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02; //抢占优先级2 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x01; //子优先级1 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器后面就是根据具体的要求写中断函数了
中断服务格式
void EXTI3_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line3)!=RESET)//判断某个线上的中断是否发生
{
中断逻辑…
EXTI_ClearITPendingBit(EXTI_Line3); //清除 LINE 上的中断标志位
}
}串口
串口也是很重要的一个环节。
F407
配置步骤
串口时钟使能:RCC_APBxPeriphClockCmd();GPIO时钟使能:RCC_AHB1PeriphClockCmd();
引脚复用映射:GPIO_PinAFConfig();
GPIO端口模式设置:GPIO_Init(); 模式设置为GPIO_Mode_AF
串口参数初始化:USART_Init();
开启中断并且初始化NVIC(如果需要开启中断才需要这个步骤)NVIC_Init();USART_ITConfig();
使能串口:USART_Cmd();
编写中断处理函数:USARTx_IRQHandler();
串口数据收发:
void USART_SendData();//发送数据到串口,DR
uint16_t USART_ReceiveData();//接受数据,从DR读取接受到的数据
串口传输状态获取:
FlagStatus USART_GetFlagStatus();
void USART_ClearITPendingBit();
实例
//GPIO端口设置GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能USART1时钟//串口1对应引脚复用映射GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //GPIOA9复用为USART1GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //GPIOA10复用为USART1//USART1端口配置GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9与GPIOA10GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHzGPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9,PA10//USART1 初始化设置USART_InitStructure.USART_BaudRate = bound;//波特率设置USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式USART_Init(USART1, &USART_InitStructure); //初始化串口1USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启相关中断//Usart1 NVIC 配置NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中断通道NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//抢占优先级3NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子优先级3NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、USART_Cmd(USART1, ENABLE); //使能串口1 中断服务函数F103
串口时钟使能,GPIO时钟使能:RCC_APB2PeriphClockCmd();
串口复位:USART_DeInit(); 这一步不是必须的
GPIO端口模式设置:GPIO_Init();
串口参数初始化:USART_Init();
开启中断并且初始化NVIC(如果需要开启中断才需要这个步骤)NVIC_Init();USART_ITConfig();
使能串口:USART_Cmd();
编写中断处理函数:USARTx_IRQHandler();
串口数据收发:
void USART_SendData();//发送数据到串口,DR
uint16_t USART_ReceiveData();//接受数据,从DR读取接受到的数据
串口传输状态获取:
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
void USART_ClearITPendingBit(USART_TypeDef* USARTx, uint16_t USART_IT);
实例
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
//①串口时钟使能,GPIO 时钟使能,复用时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|
RCC_APB2Periph_GPIOA, ENABLE); //使能 USART1,GPIOA 时钟//②串口复位
USART_DeInit(USART1); //复位串口 1//③GPIO 端口模式设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //ISART1_TX PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化 GPIOA.9GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //USART1_RX PA.10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化 GPIOA.10//④串口参数初始化
USART_InitStructure.USART_BaudRate = 115200; //波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长为 8 位
USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl
= USART_HardwareFlowControl_None; //无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//收发模式
USART_Init(USART1, &USART_InitStructure); //⑤初始化 NVIC
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ; //抢占优先级 3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级 3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ 通道使能
NVIC_Init(&NVIC_InitStructure); //中断优先级初始化//⑤开启中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启中断//⑥使能串口
USART_Cmd(USART1, ENABLE); //使能串口中断服务函数
不同点
1.首先都要开启usart的时钟和对应串口引脚的时钟,不同的是103串口的tx引脚配置的复用推挽输出,而rx配置的是浮空输入,而407rx,tx两个都配置的复用推完输出
2.407需要对串口对应的引脚设置引脚复用器映射:调用 GPIO_PinAFConfig 函数。
这两点大家一定要注意!
定时器
103的定时器资源
103的高级定时器是TIM1和TIM8
2,3,4,5是通用定时器
6,7是基本定时器
都是16位的
407的定时器资源
407的高级定时器是TIM1和TIM8
2,3,4,5,9,10,11,12,13,14是通用定时器
6,7是基本定时器
有16位和32位的
103和407的定时器中断
这个基本定时器的配置是一样的
能定时器时钟。RCC_APB1PeriphClockCmd();
初始化定时器,配置ARR,PSC。TIM_TimeBaseInit();
开启定时器中断,配置NVIC。void TIM_ITConfig();NVIC_Init();使能定时器。TIM_Cmd();
编写中断服务函数。TIMx_IRQHandler();TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能//定时器TIM3初始化TIM_TimeBaseStructure.TIM_Period = arr; //设置自动重装载的值 TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断//中断优先级NVIC设置NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能NVIC_Init(&NVIC_InitStructure); //初始化NVIC寄存器TIM_Cmd(TIM3, ENABLE); //使能TIMx //定时器3中断服务函数
void TIM3_IRQHandler(void)
{if(TIM_GetITStatus(TIM3,TIM_IT_Update)==SET) //溢出中断{LED1=!LED1;//DS1翻转}TIM_ClearITPendingBit(TIM3,TIM_IT_Update); //清除中断标志位
}PWM
F407
使能定时器14和相关IO口时钟。使能定时器14时钟:RCC_APB1PeriphClockCmd();使能GPIOF时钟:RCC_AHB1PeriphClockCmd ();
初始化IO口为复用功能输出。函数:GPIO_Init();GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能GPIOF9复用映射到定时器14GPIO_PinAFConfig(GPIOF,GPIO_PinSource9,GPIO_AF_TIM14); 初始化定时器:ARR,PSC等:TIM_TimeBaseInit();初始化输出比较参数:TIM_OC1Init();使能预装载寄存器: TIM_OC1PreloadConfig(TIM14, TIM_OCPreload_Enable);
使能自动重装载的预装载寄存器允许位TIM_ARRPreloadConfig(TIM14,ENABLE);
使能定时器。 TIM_Cmd();
不断改变比较值CCRx,达到不同的占空比效果: TIM_SetCompare1();GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM14,ENABLE); //TIM14时钟使能 RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE); //使能PORTF时钟 GPIO_PinAFConfig(GPIOF,GPIO_PinSource9,GPIO_AF_TIM14); //GPIOF9复用为定时器14GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //GPIOF9GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHzGPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉GPIO_Init(GPIOF,&GPIO_InitStructure); //初始化PF9TIM_TimeBaseStructure.TIM_Prescaler=psc; //定时器分频TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式TIM_TimeBaseStructure.TIM_Period=arr; //自动重装载值TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1; TIM_TimeBaseInit(TIM14,&TIM_TimeBaseStructure);//初始化定时器14//初始化TIM14 Channel1 PWM模式 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性:TIM输出比较极性低TIM_OC1Init(TIM14, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM1 4OC1TIM_OC1PreloadConfig(TIM14, TIM_OCPreload_Enable); //使能TIM14在CCR1上的预装载寄存器TIM_ARRPreloadConfig(TIM14,ENABLE);//ARPE使能 TIM_Cmd(TIM14, ENABLE); //使能TIM14F103
使能定时器3和相关IO口时钟。使能定时器3时钟:RCC_APB1PeriphClockCmd();使能GPIOB时钟:RCC_APB2PeriphClockCmd();初始化IO口为复用功能输出。函数:GPIO_Init();GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
这里我们是要把PB5用作定时器的PWM输出引脚,所以要重映射配置,
所以需要开启AFIO时钟。同时设置重映射。RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); 初始化定时器:ARR,PSC等:TIM_TimeBaseInit();初始化输出比较参数:TIM_OC2Init();
使能预装载寄存器: TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
使能定时器。TIM_Cmd();
不断改变比较值CCRx,达到不同的占空比效果:TIM_SetCompare2();GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5 //设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO//初始化TIM3TIM_TimeBaseStructure.TIM_Period = arr; //设置自动重装载值TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位//初始化TIM3 Channel2 PWM模式 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器TIM_Cmd(TIM3, ENABLE); //使能TIM3总结
如果移植之后发现不能用,首先检查IO的使能,如果使能没有问题进一步检查引脚配置的模式。该复用成对应功能的有没有复用。有用中断要注意F4中断时钟初始化的写法,如果用到SPI这种需要时序的,确认上面的没问题了,在检查一下时钟。
如果你的SPI发现自己动一动线就有数据了,这个时候就去看引脚的模式,是不是推挽输出。该浮空输入的有没有浮空输入,那个默认无上下拉的配置直接不要,不要写那个东西。
跳转链接
我这篇文章也是引用这位博主的文章,在此感谢。
相关文章:
)
如何快速移植(从STM32F103到STM32F407)
最近用到F4的地方比较多,网上代码还是F1多一些,便需要移植代码,如何快速移植代码呢? 看下面这篇文章 外设 首先就是STM32的外设了。 STM32F407ZGT6的基本外设 STM32F407ZGT6 作为 MCU,该芯片是 STM32F407 里面配置…...
python高级练习题库实验1(B)部分
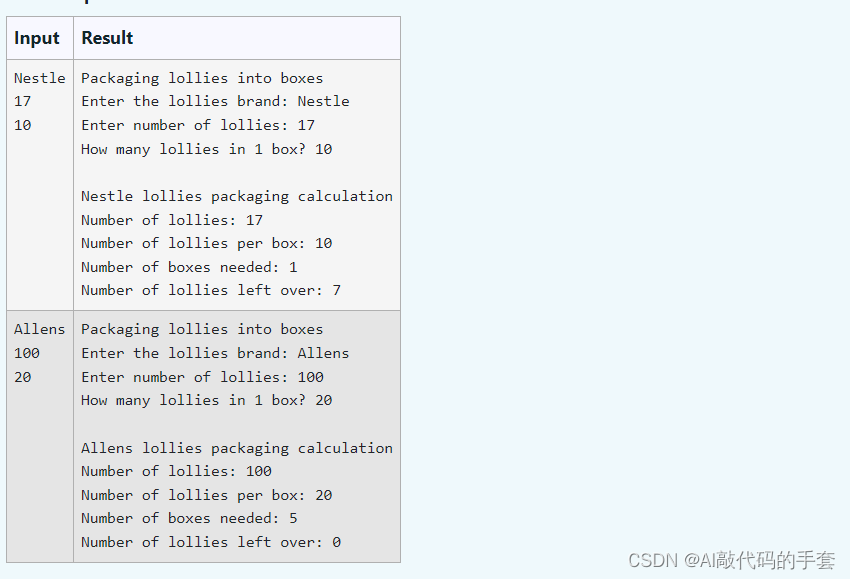
文章目录 题目1代码实验结果题目2代码实验结果题目3代码实验结果题目4代码实验结果题目5代码实验结果题目总结题目1 打包糖果小游戏,用户输入糖果品牌与个数,还有一个盒子里面可以装多少个糖果,输出一些打印信息,如下图所示: 代码 print("Packaging lollies into…...
)
Qt Rsa 加解密方法使用(pkcs1, pkcs8, 以及文件存储和内存存储密钥)
Qt RSA 加解密 完整使用 密钥格式: pkcs#1pkcs#8 如何区分密钥对是PKCS1还是PKCS8? 通常PKCS1密钥对的开始部分为:-----BEGIN RSA PRIVATE KEY-----或 -----BEGIN RSA PUBLIC KEY-----。而PKCS8密钥对的开始部分为:-----BEGIN…...

区分物理端口与软件端口概念:以交换机端口和Linux系统中的端口为例
文章目录 交换机端口和Linux系统中的端口有什么区别?1. 交换机的端口2. Linux系统中的端口因此,尽管两者都被称为"端口",但它们代表的含义和用途是完全不同的。 交换机端口和Linux系统中的端口有什么区别? 虽然都被称为…...
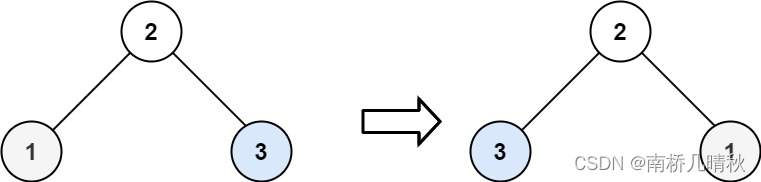
力扣226:翻转二叉树
力扣226:翻转二叉树 给你一棵二叉树的根节点 root ,翻转这棵二叉树,并返回其根节点。 示例 1: 输入:root [4,2,7,1,3,6,9] 输出:[4,7,2,9,6,3,1] 示例 2: 输入:root [2,1,3]…...

亚马逊鲲鹏系统智能自动注册与AI角色养号,探索数字化新境界
在数字化时代,亚马逊鲲鹏系统以其强大的自动化功能,为用户提供了前所未有的购物体验。如果你想利用鲲鹏系统进行自动化注册,那么准备好邮箱、IP、手机号等关键信息后,你将轻松实现自动注册,为购物之旅开启智能化新篇章…...

AOP操作日志记录
AOP操作日志记录 1.创建注解 Retention(RetentionPolicy.RUNTIME) Target(ElementType.METHOD) public interface PassportLog {String operatePage();String operateType();ClassTypEnum classType();}2.创建切面 对于字典,可以通过注解属性去转换,枚举…...
)
Linux C语言 42-进程间通信IPC之网络通信(套接字)
Linux C语言 42-进程间通信IPC之网络通信(套接字) 本节关键字:C语言 进程间通信 网络通信 套接字 TCP UDP 相关库函数:socket、bind、listen、accept、send、recv、sendto、recvfrom 参考之前的文章 Linux C语言 30-套接字操作…...
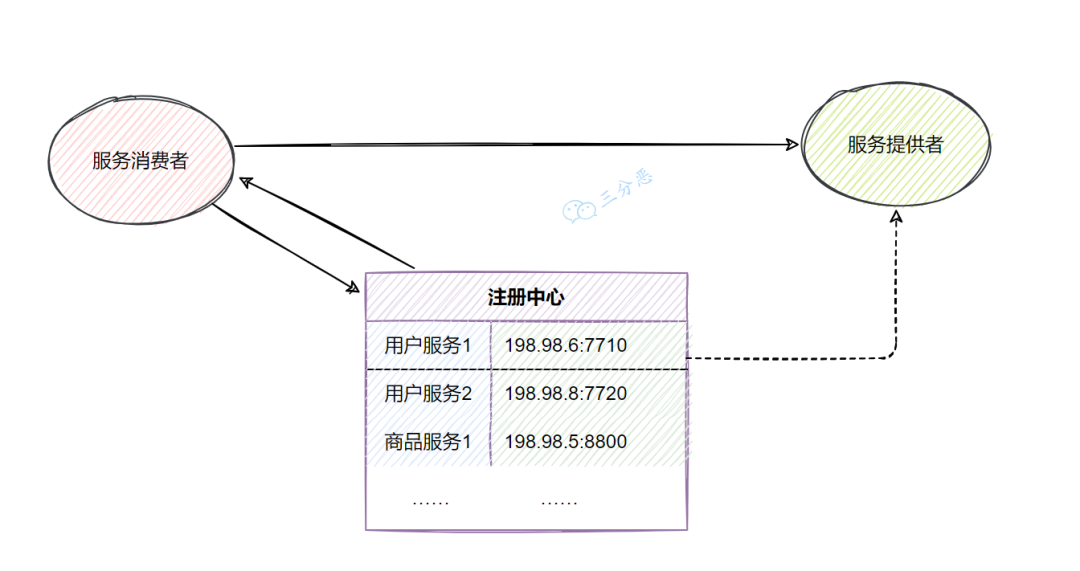
微服务知识大杂烩
1.什么是微服务? 微服务(Microservices)是一种软件架构风格,将一个大型应用程序划分为一组小型、自治且松耦合的服务。每个微服务负责执行特定的业务功能,并通过轻量级通信机制(如HTTP)相互协作。每个微服务可以独立开发、部署和扩展,使得应用程序更加灵活、可伸缩和可…...
记录一次vscode markdown的图片路径相关插件学习配置过程
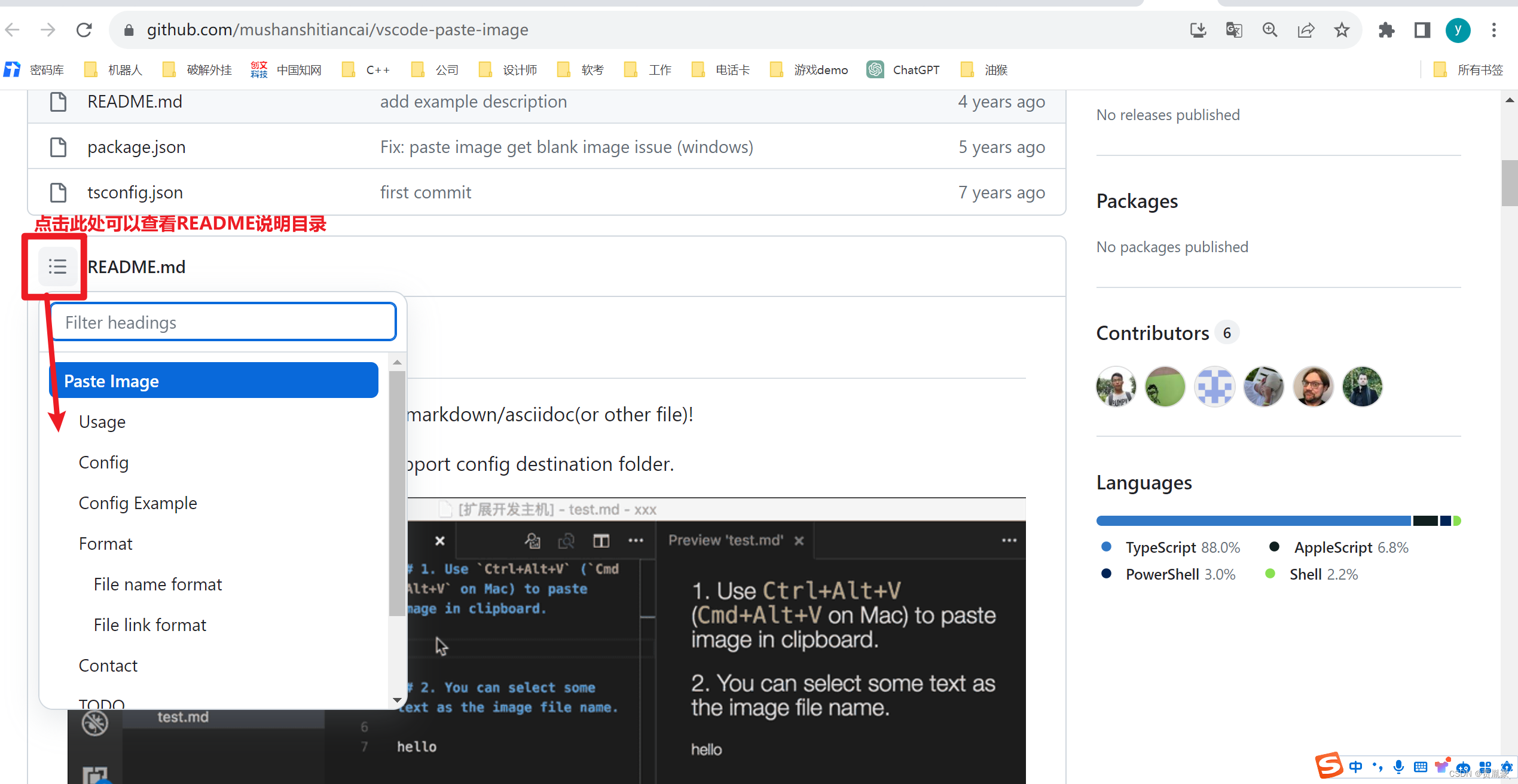
插件及说明查找过程 csdn搜索markdown图片路径,找到关于这一款插件的回答。打开vscode拓展搜索Paste Image这款插件,看到下载量挺高的,应该不赖。 点击仓库,进入该插件开源的github仓库,查看README文件阅读说明. 淡然在Vscode 插件项目下的细…...
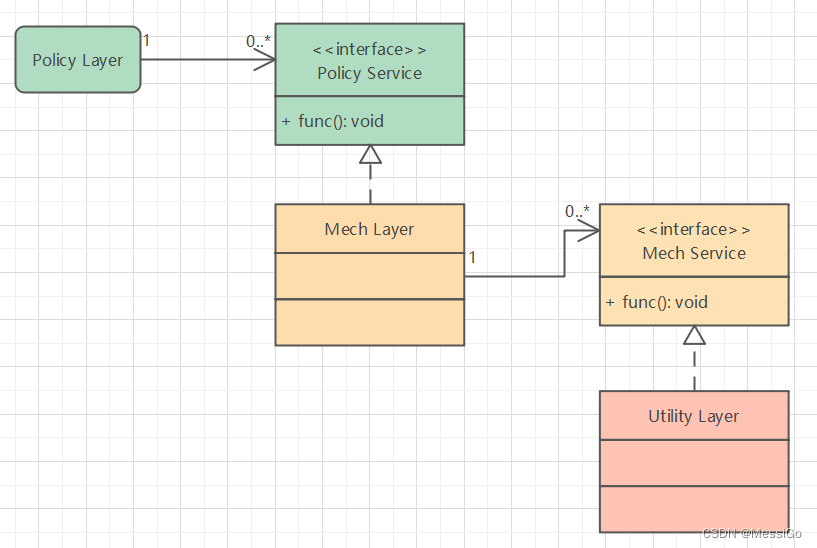
设计原则 | 依赖转置原则
一、依赖转置原则(DIP:Dependence Inversion Principle) 1、原理 高层模块不应该依赖低层模块,二者都应该依赖于抽象抽象不应该依赖于细节,细节应该依赖于抽象 2、层次化 Booch曾经说过:所有结构良好的面…...

前端开发实用技巧与经验分享
导语:在前端开发领域,掌握一些实用的技巧和经验可以帮助你更高效地完成任务。本文将分享一些前端开发的实用技巧和经验,帮助你在工作中更好地应对各种挑战。 一、使用开发者工具进行调试和优化 熟练掌握浏览器开发者工具的使用,…...

推荐一款Excel快速加载SQL的插件,方便又好用
如果告诉你只需要双击一下,SQL数据库中存放在表里面的数据,就能加载到你的Excel中,你想不想要? 今天给大家推荐一款好用的Excel插件,安装简单,使用方便,是经常使用SQL数据库的不二。 这款插件…...
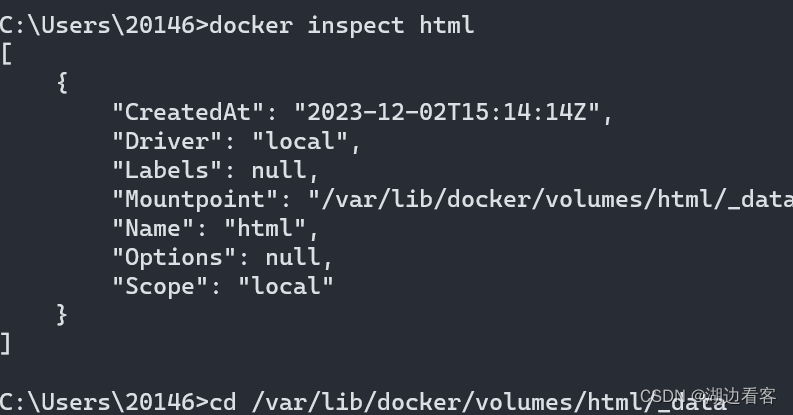
Docker快速入门(docker加速,镜像,容器,数据卷常见命令操作整理)
Docker本质是将代码所需的环境依赖进行打包运行,而在Docker中最重要的是镜像和容器 镜像:可以简单地理解为每启动一个docker镜像就会占用计算机一个进程,这个进程和另外起的docker镜像的进程是相互独立的,以数据库为例,每个镜像都会copy一份数据库,在他所在的进程中.别的镜像在…...

http和https的区别有哪些
目录 HTTP(HyperText Transfer Protocol) HTTPS(HyperText Transfer Protocol Secure) 区别与优势 应用场景 未来趋势 当我们浏览互联网时,我们经常听到两个常用的协议:HTTP(HyperText Tra…...

使用Keil-MDK生成*.bin格式可执行文件
使用Keil-MDK生成*.bin格式可执行文件 文章目录 使用Keil-MDK生成*.bin格式可执行文件前言一、fromelf.exe工具二、使用方法1.配置输出2.输出格式 前言 在使用Keil MDK的集成开发环境中,默认情况下可以生成*.axf格式的调试文件和*.hex格式的可执行文件。虽然文件可…...

基于springboot+vue篮球联盟管理系统源码
🍅 简介:500精品计算机源码学习 🍅 欢迎点赞 👍 收藏 ⭐留言 📝 文末获取源码 目录 一、以下学习内容欢迎交流: 二、文档资料截图: 三、项目技术栈 四、项目运行图 背景: 篮球运…...

分页助手入门以及小bug,报sql语法错误
导入坐标 5版本以上的分页助手 可以不用手动指定数据库语言,它会自动识别 <dependency> <groupId>com.github.pagehelper</groupId> <artifactId>pagehelper</artifactId> <version>5.3.2</version> </dependency&g…...

Java中的并发编程:深入理解CountDownLatch
Java中的并发编程:深入理解CountDownLatch 本文将深入探讨Java中的并发编程,重点关注CountDownLatch的使用。通过理解这些概念和技术,我们可以编写出更高效、稳定的Java程序。 一、CountDownLatch简介 CountDownLatch是Java中的一个同步工具…...

Windows 安装 flash-attention 和 bitsandbytes
首先保证cuda版本为12.1,torch版本为2.1.0及以上,python版本3.10以上 从此处下载最新版的whl,https://github.com/jllllll/bitsandbytes-windows-webui/releases/tag/wheels,通过whl来安装bitsandbytes 从此处下载最新版的whl&a…...

零门槛NAS搭建:WinNAS如何让普通电脑秒变私有云?
一、核心优势:专为Windows用户设计的极简NAS WinNAS由深圳耘想存储科技开发,是一款收费低廉但功能全面的Windows NAS工具,主打“无学习成本部署” 。与其他NAS软件相比,其优势在于: 无需硬件改造:将任意W…...
visual studio 2022更改主题为深色
visual studio 2022更改主题为深色 点击visual studio 上方的 工具-> 选项 在选项窗口中,选择 环境 -> 常规 ,将其中的颜色主题改成深色 点击确定,更改完成...

基础测试工具使用经验
背景 vtune,perf, nsight system等基础测试工具,都是用过的,但是没有记录,都逐渐忘了。所以写这篇博客总结记录一下,只要以后发现新的用法,就记得来编辑补充一下 perf 比较基础的用法: 先改这…...

【C++从零实现Json-Rpc框架】第六弹 —— 服务端模块划分
一、项目背景回顾 前五弹完成了Json-Rpc协议解析、请求处理、客户端调用等基础模块搭建。 本弹重点聚焦于服务端的模块划分与架构设计,提升代码结构的可维护性与扩展性。 二、服务端模块设计目标 高内聚低耦合:各模块职责清晰,便于独立开发…...
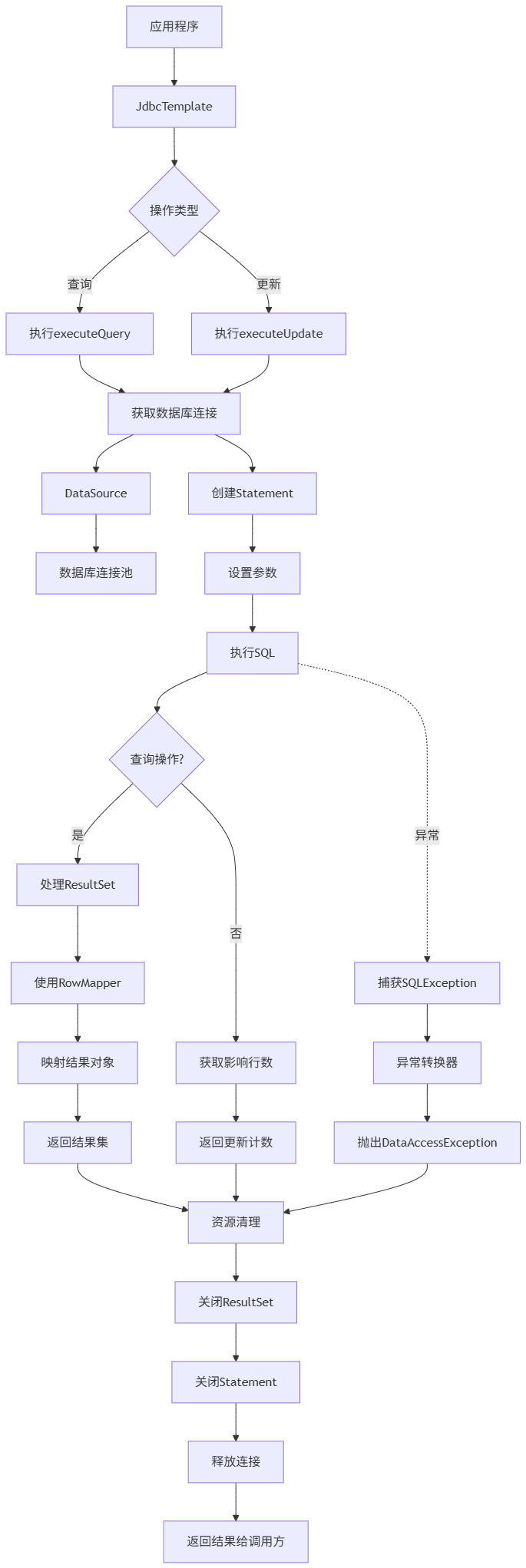
Spring数据访问模块设计
前面我们已经完成了IoC和web模块的设计,聪明的码友立马就知道了,该到数据访问模块了,要不就这俩玩个6啊,查库势在必行,至此,它来了。 一、核心设计理念 1、痛点在哪 应用离不开数据(数据库、No…...

基于Springboot+Vue的办公管理系统
角色: 管理员、员工 技术: 后端: SpringBoot, Vue2, MySQL, Mybatis-Plus 前端: Vue2, Element-UI, Axios, Echarts, Vue-Router 核心功能: 该办公管理系统是一个综合性的企业内部管理平台,旨在提升企业运营效率和员工管理水…...

Linux系统部署KES
1、安装准备 1.版本说明V008R006C009B0014 V008:是version产品的大版本。 R006:是release产品特性版本。 C009:是通用版 B0014:是build开发过程中的构建版本2.硬件要求 #安全版和企业版 内存:1GB 以上 硬盘…...

从面试角度回答Android中ContentProvider启动原理
Android中ContentProvider原理的面试角度解析,分为已启动和未启动两种场景: 一、ContentProvider已启动的情况 1. 核心流程 触发条件:当其他组件(如Activity、Service)通过ContentR…...

数据结构:递归的种类(Types of Recursion)
目录 尾递归(Tail Recursion) 什么是 Loop(循环)? 复杂度分析 头递归(Head Recursion) 树形递归(Tree Recursion) 线性递归(Linear Recursion)…...
热门Chrome扩展程序存在明文传输风险,用户隐私安全受威胁
赛门铁克威胁猎手团队最新报告披露,数款拥有数百万活跃用户的Chrome扩展程序正在通过未加密的HTTP连接静默泄露用户敏感数据,严重威胁用户隐私安全。 知名扩展程序存在明文传输风险 尽管宣称提供安全浏览、数据分析或便捷界面等功能,但SEMR…...