关于马达保护器 的选型 你知道吗
一、智能马达保护器的介绍
在有色冶炼中,根据工艺需求和客户需求,智能电动机保护器的主要应用模式有保护模式、端子控制模式、全通信模式和半通信模式。
4.1保护模式
在保护模式下,智能电动机保护器只利用其自身的保护功能和测量功能,不参与外部控制,相当于原来热继电器的作用。具体接线如图1所示。
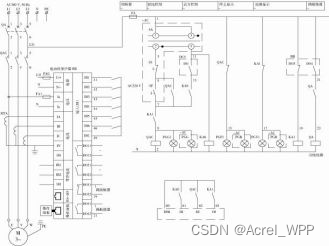
图1保护模式接线图
这种模式适用于原有系统的改造升级,外部的控制接线修改很小。优点在于多幅度减少了因智能电动机保护器装置本身出问题或通信出问题带来的风险;缺点是没能充分发挥智能电动机保护器的功能,远程DCS控制线路仍然采用的是硬线。部分比较保守的客户由于对通信稳定性和可靠性的不信任,普遍采用这种模式。
4.2端子控制模式
在端子控制模式下,智能电动机保护器通过自身的开关量输入端子采集外部控制命令,继而控制其开关量输出电动机的起、停或正反转等,具体接线如图2所示。
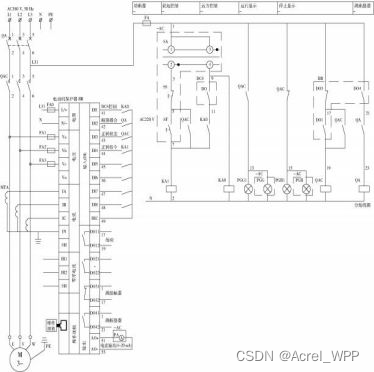
图2端子控制模式接线图
在该模式下,智能电动机保护器具备保护和控制两个功能,相比上面的保护模式,优势在于可以充分使用智能电动机保护器的控制功能,但和保护模式一样,其远程DCS控制线路仍为硬线。
4.3全通信模式
在全通信模式下,就地控制时智能电动机保护器只起保护作用,不参与控制,相当于保护模式;远程DCS通过通信线路控制智能保护器输出电机起、停或正反转等命令。
这种模式的优势主要体现在两个方面:一是保证了就地控制的独立性,尽可能规避通信控制带来的风险,提高了安*系数;二是大大减少了电缆的使用和接线的工作量。
影响这种模式推广的关键因素是客户对通信的稳定性和可靠性的担忧。实际应用中,个别工程出现过通信不畅、经常掉线、易受干扰等问题,但基本都是由于通信网络方案不合理、施工质量不佳以及通信线路和产品质量有问题等因素导致的,全通信模式本身已经很成熟,并不存在大的问题,国内外早已大量应用。
4.4半通信模式
半通信模式的特点是电机的远程DCS起、停控制仍然采用硬线,只有状态信号的上传走的是通信网络,所以称为半通信模式。
半通信模式介于保护模式和通信模式之间,是一种折中的应用。其应用背景为:客户对智能电动机保护器信心不足,担忧由于通信不可靠导致电机的起、停不受控制,继而影响生产或带来安*事故,故远程的控制信号仍然采用硬线方式传输。不过这种模式也为将来改为全通信模式留出了接口,方便日后升级改造。
以上仅以普通电机单相运行为例,列出智能电动机保护器4种常用的工作模式,每种模式都有其应用的背景和现实需求,设计人员需要根据工程实际和需求来选用合适的工作模式。
二、问题和建议
2.1智能电动机保护器短路保护的问题
智能电动机保护器具有很多种保护功能,短路保护是其中之一。其主要保护逻辑是根据采集的电流进线分析和计算,当电流超过5倍电机额定电流时,其短路保护出口发出断路器跳闸命令。该跳闸命令是通过断路器的分励线圈来实现的。这个逻辑本身没有问题,问题出在智能电动机保护器和分励线圈的工作电源上。一般情况下,该工作电源从电动机主回路的某一相上取电,当通信控制模式接线图外部发生三相短路时,母线的各相电压会下降,或工作电源所在那一相发生单相接地短路时,该相电压也会下降。当电压下降到小于智能电动机保护器和分励脱扣器的正常工作电压时,智能电动机保护器和分励线圈均无法正常工作,短路保护也无法实现。其实电动机主回路的断路器本身就具备很好的短路保护功能,所以智能电动机保护器设置短路保护必要性不大。
2.2智能电动机保护器测量准确度低的问题
智能电动机保护器基本只配备一组三相CT,而保护器的保护功能肯定是放在前面的,测量和计量功能只是附带的,因而配置的CT首先要满足保护功能的需求。保护功能所用CT要求较大的故障电流通过时铁心不能饱和,以便较好地反映一次电流值,所以在正常电流通过时,智能电动保护器测量的准确度较低。因此,智能电动机保护器的计量数据不适合作为企业的生产成本数据,如果想采集能耗数据,应单设测量CT和计量表。
2.3智能电动机保护器和变频器配合应用易受电磁干扰的问题
当智能电动机保护器与变频器安装在同一个柜内配合使用时,智能电动机保护器会因为变频器的电磁干扰出现误动作的情况。某工程中,智能电动机保护器作为变频器的旁路保护电器,正常情况下变频器工作时,旁路没有电流通过,但现场却发现智能电动机保护器不断发出漏电故障报警。理论上来说,智能电动机保护器的抗电磁干扰能力满足国家标准要求,不应该出现这种情况,但实际上这种情况不少。因此建议智能电动机保护器和变频器分柜安装,尽可能远离,避免干扰。还有一种接线方式也经常用到,就是现场控制箱的按钮和远程的起、停信号直接接到智能电动机保护器的输入端子。这种方式的优点在于没有转接,接线比较简单,但这种接线方式在工程中经常出现控制信号的干扰问题。而出现这种问题的原因在于控制信号电压的不一致:端子输入的电压为24VDC,而输出口至控制箱信号灯的电压为220VAC。如果设计者没有注意这一点,将至控制箱的所有信号合用一根控制线的话,高压干扰低压的现象就会出现,导致控制出现异常。避免这种问题的方法也很简单,只要将这两种不同电压的信号用不同的控制电缆分开即可。
2.4智能电动机保护器安装在抽屉柜中的通信问题
目前市面上的智能电动机保护器采用的通信协议或接口有很多种,但无论采用何种协议或接口,当智能电动机保护器安装在抽屉单元内时就会遇到通信电缆的连接问题。众所周知,抽屉单元是可移动的,甚至是可移走替换的,它通过一次插头和二次插针与外部固定的动力电缆和控制电缆连接。由于智能电动机保护器安装在抽屉单元内,它与外部通信总线之间的连接就成了一个难题。如果和其他控制信号一样采用二次插针的方式,虽然可以解决连接的问题,但由于二次插针裸露,没有屏蔽层,无法保证通信不被干扰。通信的可靠性是必要的,所以大都采用了通信电缆从柜后直接穿孔进入抽屉单元后与智能电动机保护器相连的方式。通信电缆在柜后留有余量,当抽屉单元小范围抽出时没有问题,但当抽屉单元完全抽出柜体时,就需要先拔掉连接头,这种做法牺牲了抽屉单元的一部分便利性。
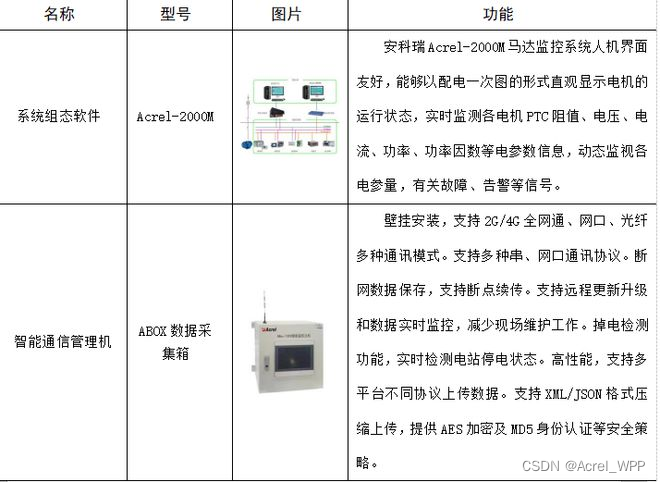
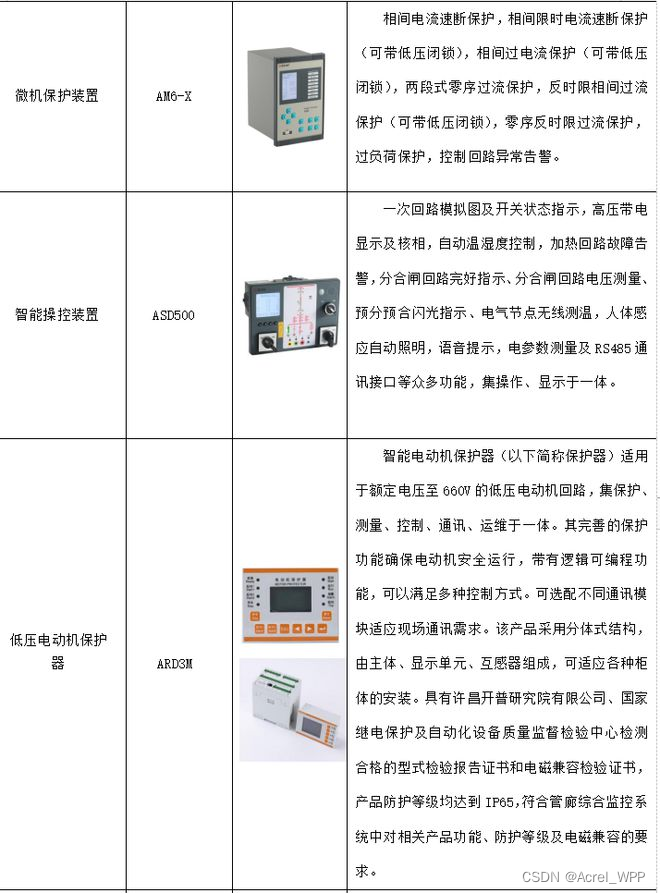
三、ARD系列电动机保护器产品选型介绍
ARD智能电动机保护器适用于额定电压至660V的低压电动机回路,集保护、测量、控制、通讯、运维于一体。其完善的保护功能确保电动机安*运行,带有逻辑可编程功能,可以满足多种控制方式。该产品采用分体式结构,由主体、显示单元、互感器组成,可适应各种柜体的安装。可选配不同通讯模块适应现场通讯需求。
3.1 功能特点
■支持基波和全波电力参数测量(U、I、P、Q、S、PF、F、EP、EQ),电流及电流不平衡度、电流正序、负序、零序分量、电压、三相电压相角、剩余电流。
■保护功能包括过载反时限、过载定时限、接地、起动超时、漏电、欠载、断相、堵转、阻塞、短路、溢出、不平衡(电流、电压)、过功率、欠功率、过压、欠压、相序、温度、tE时间、外部故障、起动次数限制、运行时间报警、故障次数报警。
■9路可编程DI输入,默认采用内置DC24V电源,也可选择外部有源湿接点。
■5路可编程DO输出,满足直接起动,星—三角起动,自耦变压器起动,等多种起动方式,可通过通讯总线实现主站对电动机的“起/停”。
■可选抗晃电功能:支持晃电立即再启动、失压重起动。
■可选配MODBUS_RTU通讯、PROFIBUSDP通讯,支持zui多2路通讯接口。
■可选配1路DC4-20mA模拟量输出接口,与DCS系统相接,可实现对现场设备的监控。
■具有故障记录、起动记录、停车记录、DI变位记录和再起动记录等各类事件记录。
■显示界面液晶显示,支持中/英文切换。
3.2、产品选型
选型清单1
选型清单2
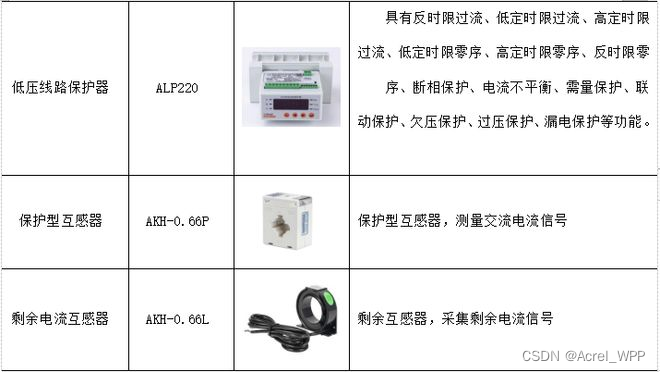
选型清单3
四、结束语
智能电动机保护器替代传统热继电器是大势所趋,通过智能电动机保护器以总线的通信方式组网实现工厂低压电机的遥测、是智能配电和智能工厂的基本需求。智能电动机保护器要想得到更好的应用和推广,还需要工程设计人员和设备厂家密切配合,根据出现的问题提出更好的解决方案。
相关文章:
关于马达保护器 的选型 你知道吗
一、智能马达保护器的介绍 在有色冶炼中,根据工艺需求和客户需求,智能电动机保护器的主要应用模式有保护模式、端子控制模式、全通信模式和半通信模式。 4.1保护模式 在保护模式下,智能电动机保护器只利用其自身的保护功能和测量功能&#…...

springboot(ssm高校竞赛管理系统 在线竞赛平台 Java系统
springboot(ssm高校竞赛管理系统 在线竞赛平台 Java系统 开发语言:Java 框架:ssm/springboot vue JDK版本:JDK1.8(或11) 服务器:tomcat 数据库:mysql 5.7(或8.0) 数…...
SDXL使用animateDiff和hotshot-xl进行文生视频
截至2023.12.8号,目前市面上有两款适用于SDXL的文生视频开源工具,分别是AnimateDiff和hotshot-xl。 一、工具下载链接 (1)AnimateDiff的webui版本的git链接: GitHub - continue-revolution/sd-webui-animatediff: A…...

【高数:3 无穷小与无穷大】
【高数:3 无穷小与无穷大】 1 无穷小与无穷大2 极限运算法则3 极限存在原则4 趋于无穷小的比较 参考书籍:毕文斌, 毛悦悦. Python漫游数学王国[M]. 北京:清华大学出版社,2022. 1 无穷小与无穷大 无穷大在sympy中用两个字母o表示无…...

C语言预读取技术 __builtin_prefetch
__builtin_prefetch 是一个编译器内置函数,用于在编译时向编译器发出指令,要求在执行期间预取内存数据。它通常用于提高程序的性能,特别是对于那些需要频繁访问内存的情况。 __builtin_prefetch 函数的语法如下:c __builtin_prefe…...
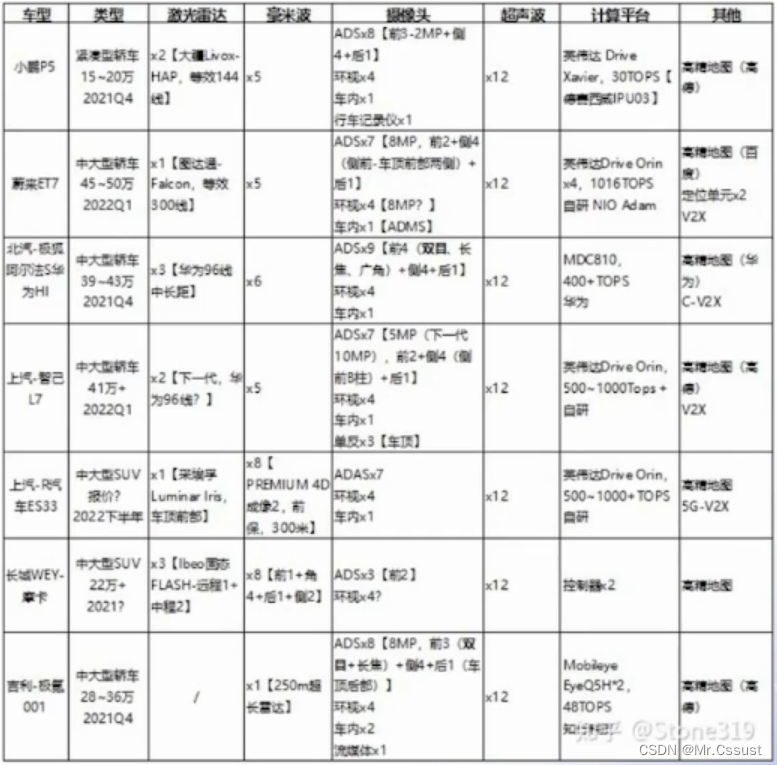
自动驾驶学习笔记(十三)——感知基础
#Apollo开发者# 学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门 《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录 前言 传感器 测距原理 坐标系 标定 同…...
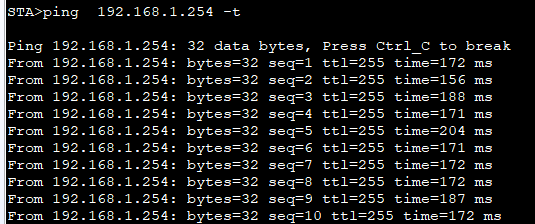
WLAN配置实验
本文记录了WLAN配置实践的过程,该操作在华为HCIA中属于相对较复杂的实验,记录过程备忘。这里不就WLAN原理解释,仅进行配置实践,可以作为学习原理时候的参考。本文使用华为ENSP进行仿真。实验拓扑图如下: 1.WLAN工作流程…...

java_web接收前端传的excel文件读取数据
#本次做一个将患者数据导入到某个模块的功能,前期集成的代码时不时出现异常,本次进行修改记录 //controller层/*** 导入患者数据*/RejectReplayRequestPostMapping("/importData")public Result<?> importData(HttpServletRequest req…...

在Vue开发中v-if指令和v-show指令的使用介绍和区别及使用场景
一、条件渲染 v-if v-if 指令用于条件性地渲染一块内容。这块内容只会在指令的表达式返回真值时才被渲染。 <h1 v-if"awesome">Vue is awesome!</h1>v-else 你也可以使用 v-else 为 v-if 添加一个“else 区块”。 <h1 v-if"awesome"&g…...

Power Query是啥
Power Query是一种用于数据获取、转换和整理的功能强大的工具,它是Microsoft Excel和Power BI中的一个组件。Power Query可以帮助用户从各种数据源中获取数据,并进行数据清洗、转换和整理,以便进一步分析和可视化。 使用Power Query…...

在k8s中部署nfs-client-provisioner
1、部署过程 1.1、环境依赖 在部署nfs-client-provisioner之前,需要先部署nfs服务。 因为,nfs-client-provisioner创建的pv都是要在nfs服务器中搭建的。 本示例中的nfs server的地址如下: [rootnode1 /]# showmount -e Export list for …...

23.12.10日总结
周总结 这周三的晚自习,学姐讲了一下git的合作开发,还有懒加载,防抖,节流 答辩的时候问了几个问题: 为什么在js中0.10.2!0.3? 在js中进行属性运算时,会出现0.10.20.300000000000000004js遵循IEEE754标…...
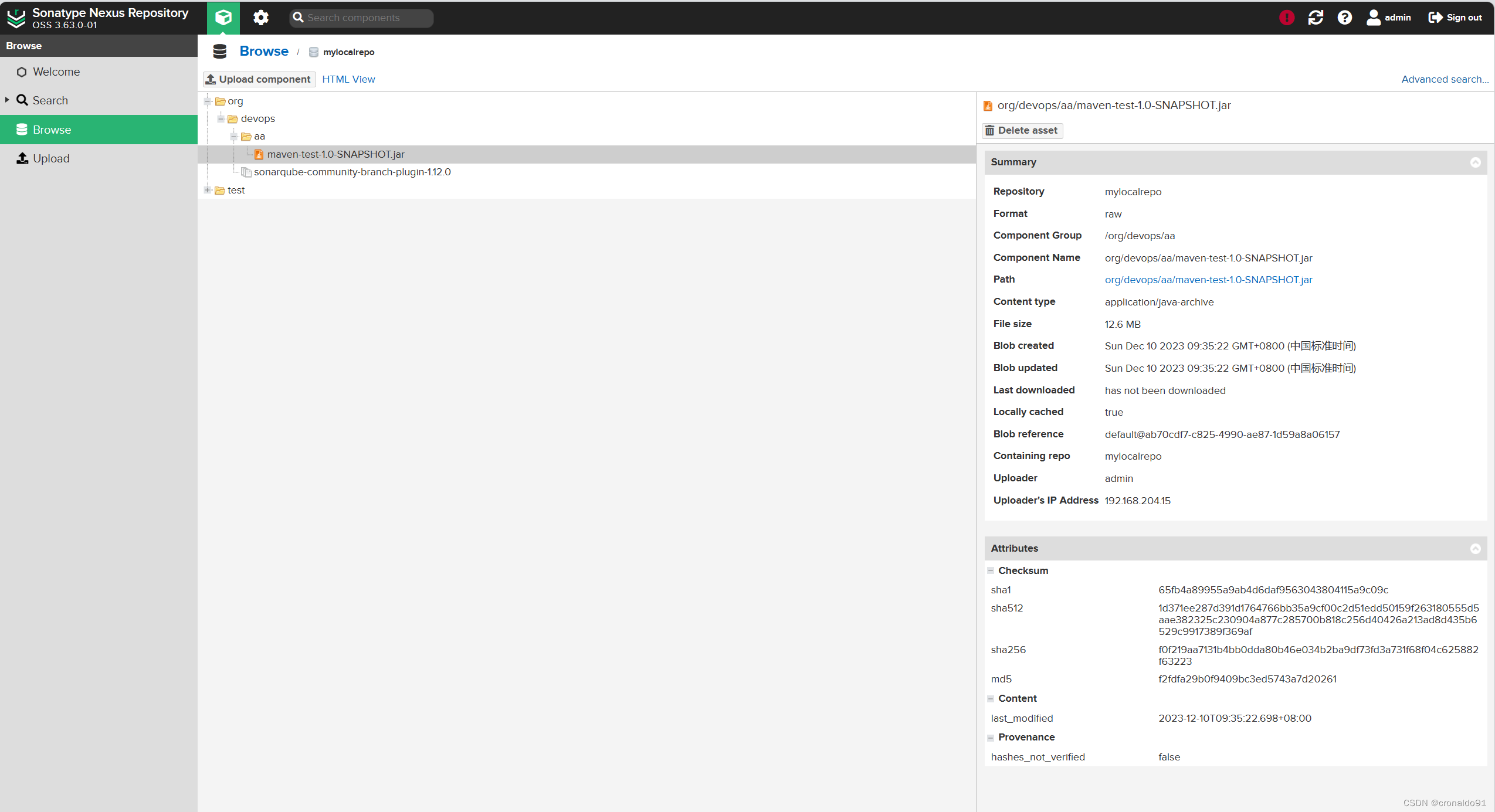
持续集成交付CICD:通过API方式上传Nexus制品
目录 一、实验 1.通过API方式上传Nexus制品 二、问题 1.如何通过API方式上传PNG图片 2.如何通过API方式上传tar.gz 与 ZIP文件 3.如何通过API方式上传Jar file文件 4.如何通过API方式上传制品(maven类型的制品)文件 5.如何下载制品 一、实验 1.通…...

Hadoop学习笔记(HDP)-Part.14 安装YARN+MR
目录 Part.01 关于HDP Part.02 核心组件原理 Part.03 资源规划 Part.04 基础环境配置 Part.05 Yum源配置 Part.06 安装OracleJDK Part.07 安装MySQL Part.08 部署Ambari集群 Part.09 安装OpenLDAP Part.10 创建集群 Part.11 安装Kerberos Part.12 安装HDFS Part.13 安装Ranger …...
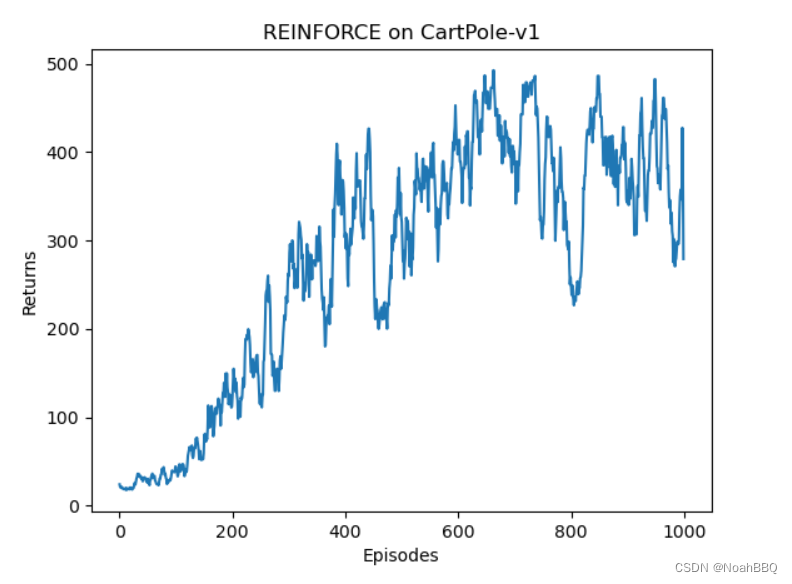
reinforce 跑 CartPole-v1
gym版本是0.26.1 CartPole-v1的详细信息,点链接里看就行了。 修改了下动手深度强化学习对应的代码。 然后这里 J ( θ ) J(\theta) J(θ)梯度上升更新的公式是用的不严谨的,这个和王树森书里讲的严谨公式有点区别。 代码 import gym import torch from …...
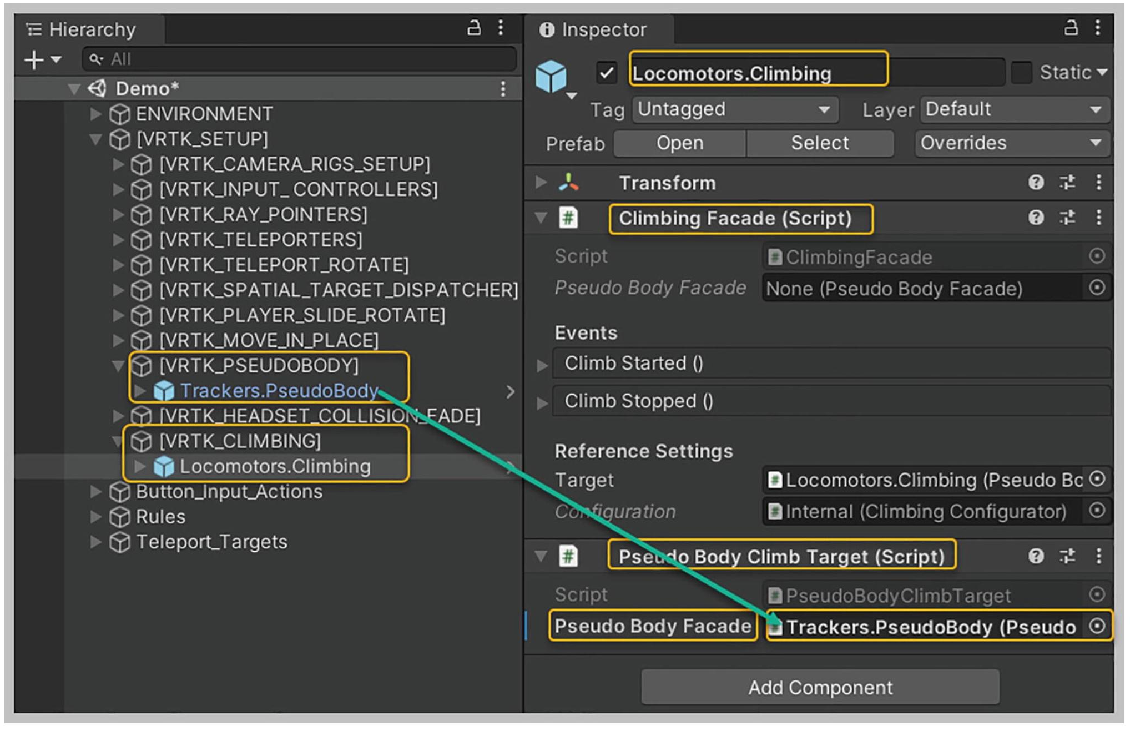
【VRTK】【VR开发】【Unity】13-攀爬
课程配套学习资源下载 https://download.csdn.net/download/weixin_41697242/88485426?spm=1001.2014.3001.5503 【概述】 VRTK提供两个预制件实现攀爬 Climbing Controller,用于控制Player的物理义体Climbable Interactable,用于设置可攀爬对象【设置Climbing Controller…...
)
华为OD机试真题-求幸存数之和-2023年OD统一考试(C卷)
题目描述: 给一个正整数列 nums,一个跳数 jump,及幸存数量 left。运算过程为:从索引为0的位置开始向后跳,中间跳过 J 个数字,命中索引为J1的数字,该数被敲出,并从该点起跳ÿ…...

python pyaudio实时读取音频数据并展示波形图
python pyaudio实时读取音频数据并展示波形图 下面代码可以驱动电脑接受声音数据,并实时展示音波图: import numpy as np import matplotlib.pyplot as plt import matplotlib.animation as animation import pyaudio import wave import os import op…...

【算法系列篇】递归、搜索和回溯(二)
文章目录 前言1. 两两交换链表中的节点1.1 题目要求1.2 做题思路1.3 代码实现 2. Pow(X,N)2.1 题目要求2.2 做题思路2.3 代码实现 3. 计算布尔二叉树的值3.1 题目要求3.2 做题思路3.3 代码实现 4. 求根节点到叶结点数字之和4.1 题目要求4.2 做题思路4.3 代码实现 前言 前面为大…...

Ubuntu下安装SDL
源码下载地址(SDL version 2.0.14):https://www.libsdl.org/release/SDL2-2.0.14.tar.gz 将源码包拷贝到系统里 使用命令解压 tar -zxvf SDL2-2.0.14.tar.gz 解压得到文件夹 SDL2-2.0.14 进入文件夹 执行命令 ./configure 执行命令 make…...

Ubuntu系统下交叉编译openssl
一、参考资料 OpenSSL&&libcurl库的交叉编译 - hesetone - 博客园 二、准备工作 1. 编译环境 宿主机:Ubuntu 20.04.6 LTSHost:ARM32位交叉编译器:arm-linux-gnueabihf-gcc-11.1.0 2. 设置交叉编译工具链 在交叉编译之前&#x…...

.Net框架,除了EF还有很多很多......
文章目录 1. 引言2. Dapper2.1 概述与设计原理2.2 核心功能与代码示例基本查询多映射查询存储过程调用 2.3 性能优化原理2.4 适用场景 3. NHibernate3.1 概述与架构设计3.2 映射配置示例Fluent映射XML映射 3.3 查询示例HQL查询Criteria APILINQ提供程序 3.4 高级特性3.5 适用场…...
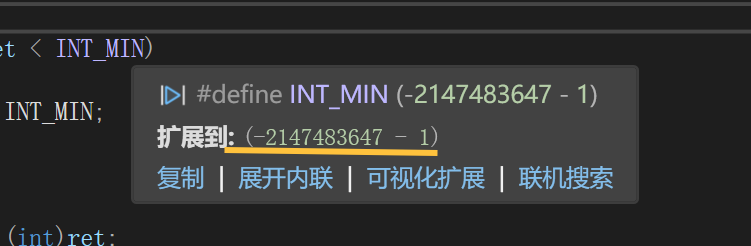
练习(含atoi的模拟实现,自定义类型等练习)
一、结构体大小的计算及位段 (结构体大小计算及位段 详解请看:自定义类型:结构体进阶-CSDN博客) 1.在32位系统环境,编译选项为4字节对齐,那么sizeof(A)和sizeof(B)是多少? #pragma pack(4)st…...

Go 语言接口详解
Go 语言接口详解 核心概念 接口定义 在 Go 语言中,接口是一种抽象类型,它定义了一组方法的集合: // 定义接口 type Shape interface {Area() float64Perimeter() float64 } 接口实现 Go 接口的实现是隐式的: // 矩形结构体…...
Nuxt.js 中的路由配置详解
Nuxt.js 通过其内置的路由系统简化了应用的路由配置,使得开发者可以轻松地管理页面导航和 URL 结构。路由配置主要涉及页面组件的组织、动态路由的设置以及路由元信息的配置。 自动路由生成 Nuxt.js 会根据 pages 目录下的文件结构自动生成路由配置。每个文件都会对…...

MODBUS TCP转CANopen 技术赋能高效协同作业
在现代工业自动化领域,MODBUS TCP和CANopen两种通讯协议因其稳定性和高效性被广泛应用于各种设备和系统中。而随着科技的不断进步,这两种通讯协议也正在被逐步融合,形成了一种新型的通讯方式——开疆智能MODBUS TCP转CANopen网关KJ-TCPC-CANP…...

WordPress插件:AI多语言写作与智能配图、免费AI模型、SEO文章生成
厌倦手动写WordPress文章?AI自动生成,效率提升10倍! 支持多语言、自动配图、定时发布,让内容创作更轻松! AI内容生成 → 不想每天写文章?AI一键生成高质量内容!多语言支持 → 跨境电商必备&am…...

AI书签管理工具开发全记录(十九):嵌入资源处理
1.前言 📝 在上一篇文章中,我们完成了书签的导入导出功能。本篇文章我们研究如何处理嵌入资源,方便后续将资源打包到一个可执行文件中。 2.embed介绍 🎯 Go 1.16 引入了革命性的 embed 包,彻底改变了静态资源管理的…...

Mac下Android Studio扫描根目录卡死问题记录
环境信息 操作系统: macOS 15.5 (Apple M2芯片)Android Studio版本: Meerkat Feature Drop | 2024.3.2 Patch 1 (Build #AI-243.26053.27.2432.13536105, 2025年5月22日构建) 问题现象 在项目开发过程中,提示一个依赖外部头文件的cpp源文件需要同步,点…...

Java毕业设计:WML信息查询与后端信息发布系统开发
JAVAWML信息查询与后端信息发布系统实现 一、系统概述 本系统基于Java和WML(无线标记语言)技术开发,实现了移动设备上的信息查询与后端信息发布功能。系统采用B/S架构,服务器端使用Java Servlet处理请求,数据库采用MySQL存储信息࿰…...