orb-slam2学习总结
目录
视觉SLAM
1、地图初始化
2、ORB_SLAM地图初始化流程
3、ORB特征提取及匹配
1、对极几何
2、对极约束 (epipolar constraint)
3、基础矩阵F、本质矩阵E
5、单目尺度不确定性
6、单应矩阵(Homography Matrix)
6.1 什么是单应矩阵
6.2 H矩阵求解
7.1 基础要点
7.2 从E矩阵中恢复R、t
7.3 从H矩阵中恢复R、t
7.4 R、t值验证
7、三角化
7.1什么是三角化
7.2 三角化求解
8、关键步骤总结
9、参考资料
视觉SLAM
一、知识点
1、地图初始化
视觉slam中,地图初始化是一个非常重要的步骤,它决定了后续的跟踪、建图等模块的效果。简单来说,初始化的目的是利用前几帧图像,计算出相机位姿,并且构建出第一批3D地图点。第一批3D地图点为跟踪、建图等模块提供了一个初始的地图,这样后续的模块就可以利用这些地图点进行跟踪、建图等工作。
双目由于已知两个相机的内外参,可以直接三角化出3D点。三角化是单目的一个步骤,所以双目初始化比较简单。
RGBD可以直接通过深度值还原3D坐标,更加简单。
配置了IMU之后实际也可以直接获得两个相机之间的姿态,也可以直接三角化出3D点(虽然IMU初始化需要考虑IMU参数的初始化,但是这部分内容不在本文的讨论范围内)。
2、ORB_SLAM地图初始化流程

3、ORB特征提取及匹配
特征点提取是一个比较独立的内容,对于ORB特征提取可以参考这篇文章:https://zeal-up.github.io/2023/05/18/orbslam/orbslam3-ORBextractor/

备注:根据描述子之间的距离来寻找两帧间 距离最近的关键件,达到关键点匹配的效果。
- 对极几何及对极约束
1、对极几何
通常,我们会将第一帧图像当作参考帧,也就是世界坐标系。第二帧相机的位姿也就是相对于第一帧相机的位姿。


总结:
利用两相机在空间中成像的(空间几何关系,也叫立体几何)规律,进而求解此时相机的位姿态。因此就需要用到特征提取步骤提取到得匹配点,利用匹配点利用对极约束求解相机位姿。
那么什么是对极约束呢?
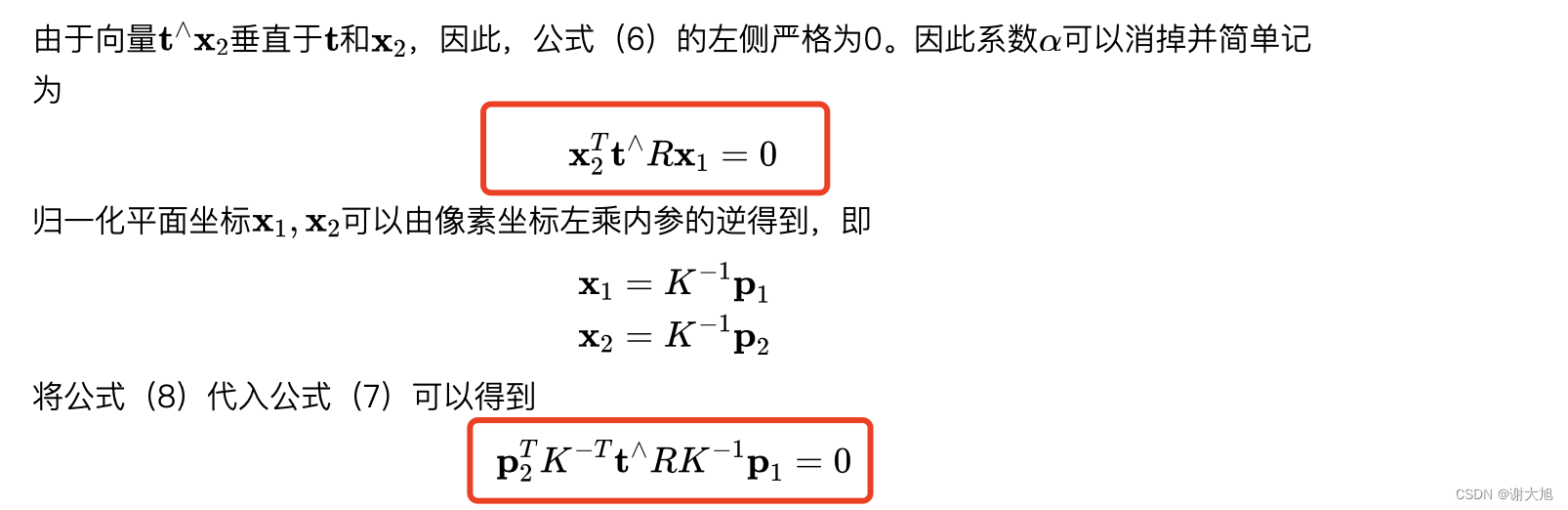
2、对极约束 (epipolar constraint)


3、基础矩阵F、本质矩阵E
Foundamental Matrix、Essential Matrix

- 对极约束的几何意义
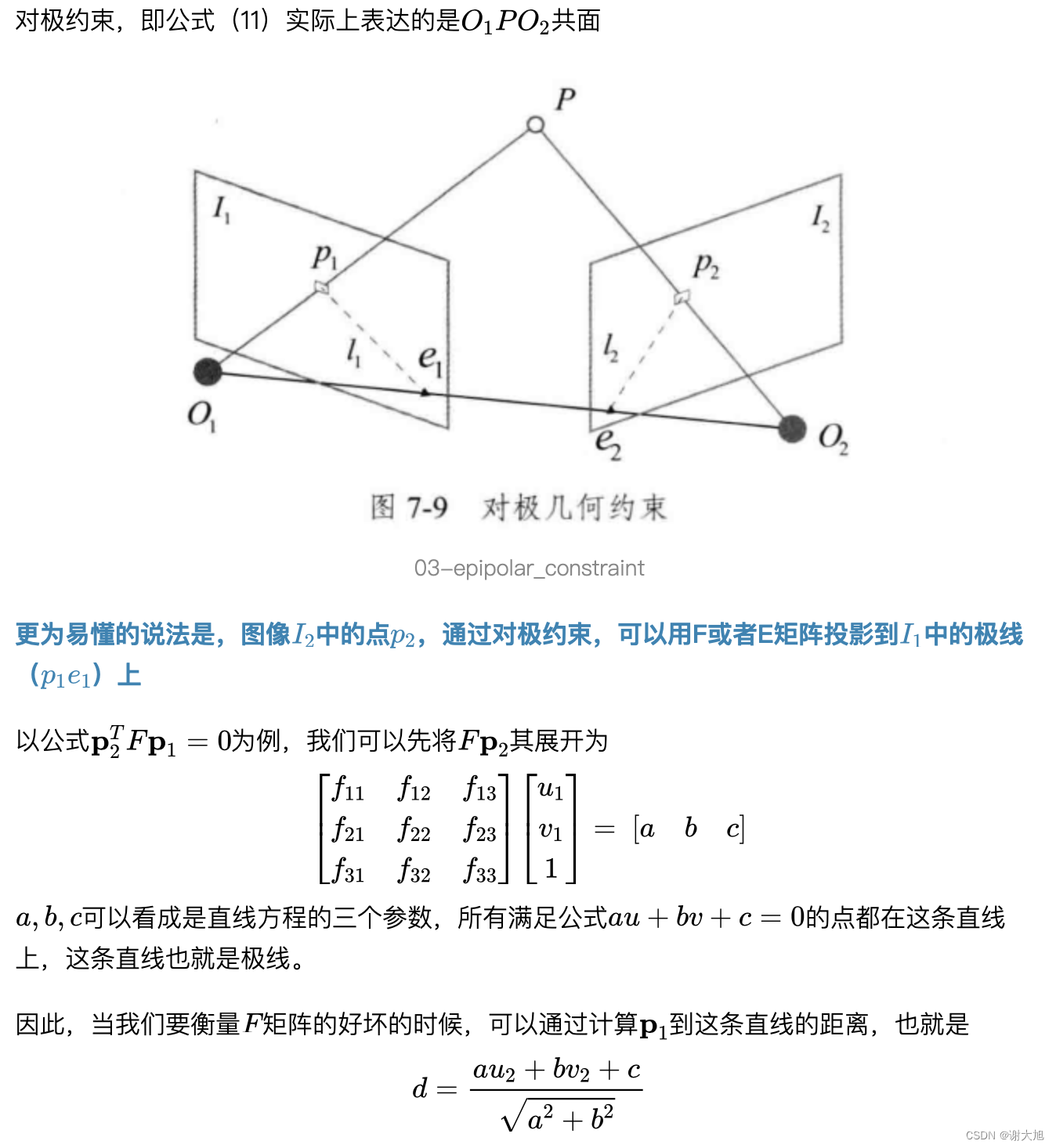
备注:
当需要寻找关键点在另外一张图片上投影点时候,评估相机姿态质量的时候,同样道理。
又或者在极线方向上寻找匹配点,避免全图片检索,提到检索效率。这些都是对极约束的应用。
- 本质矩阵和基础矩阵求解
- 方程求解

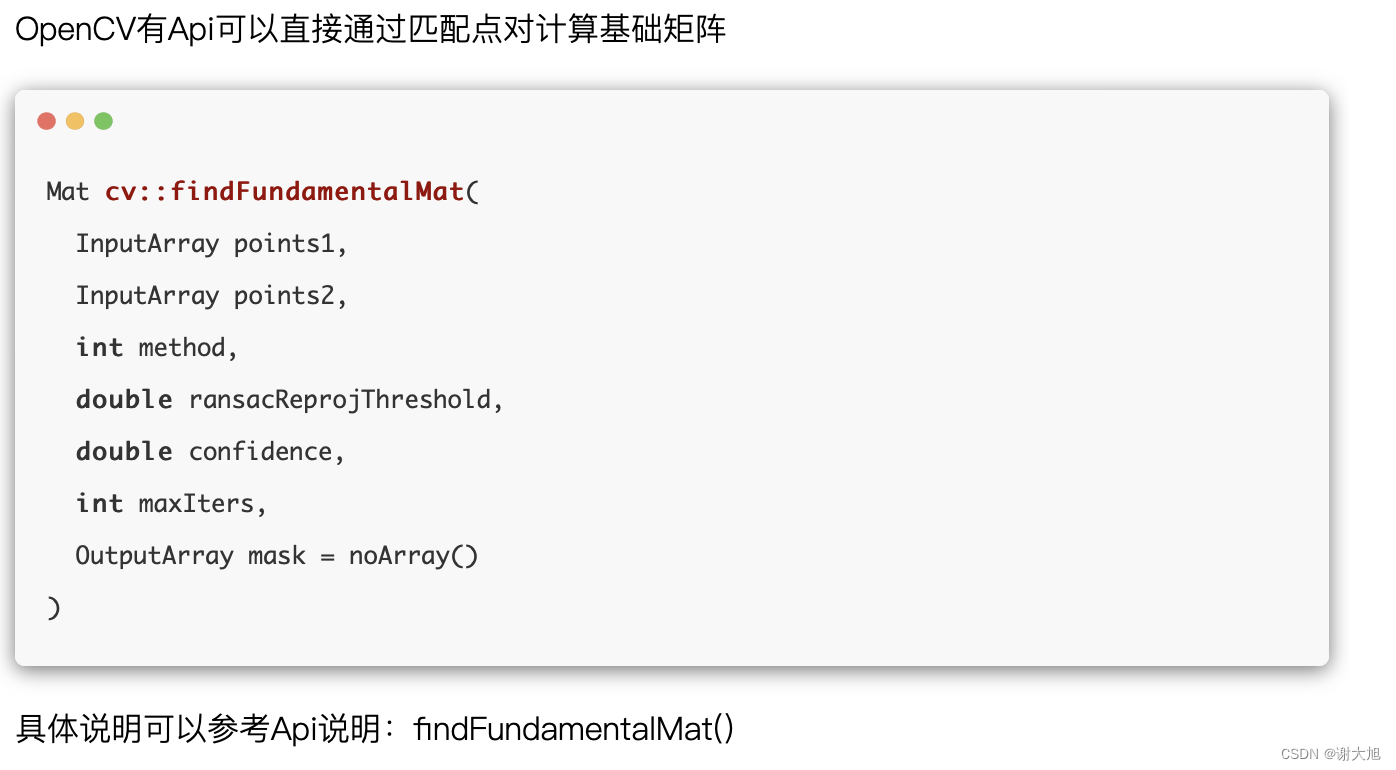
- opencv求解
5、单目尺度不确定性

在看对极几何的图
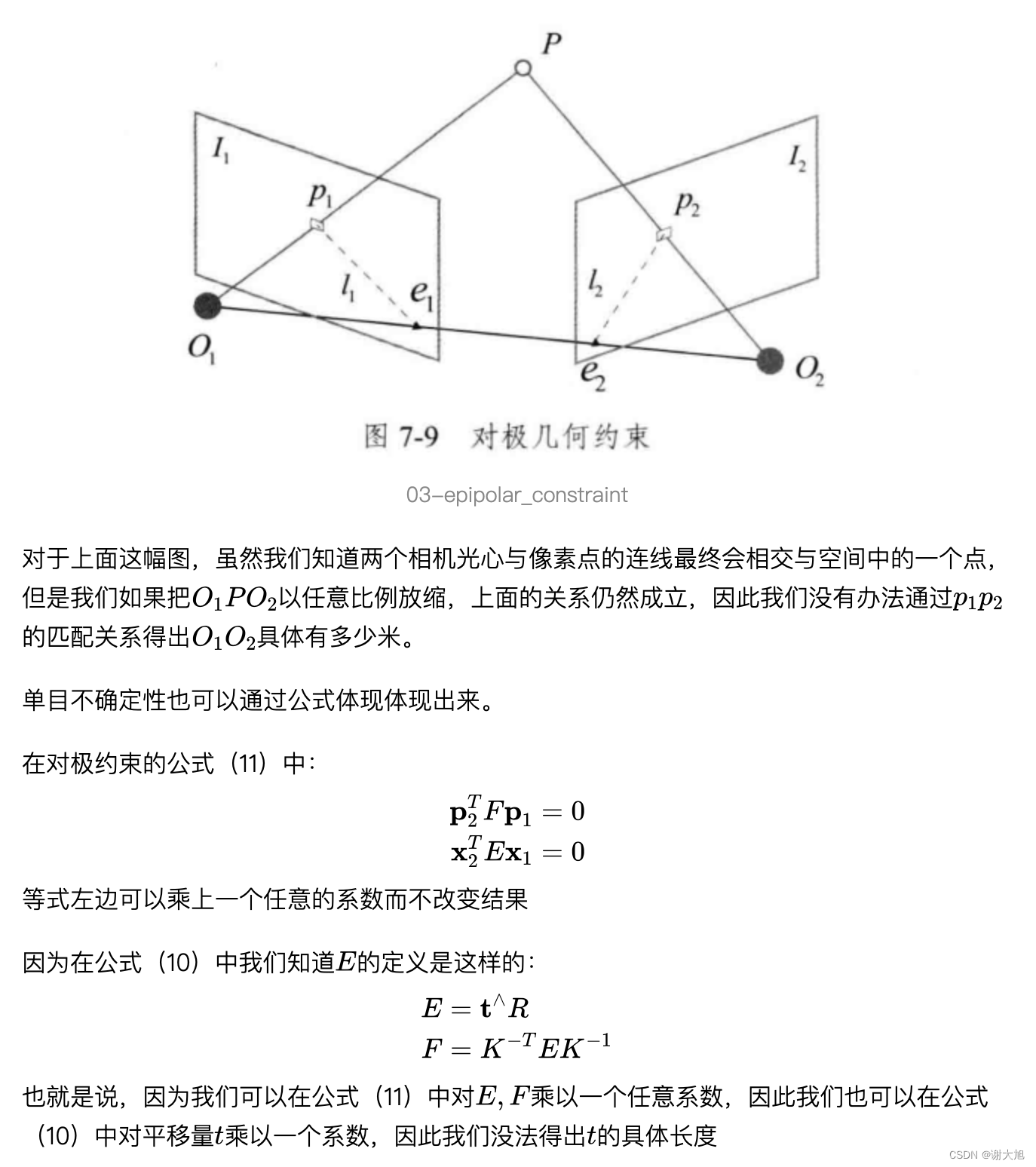
总结:
尺度信息在等式中无法接着求解,只能利用别的设备增加深度信息才能更好求解尺度。
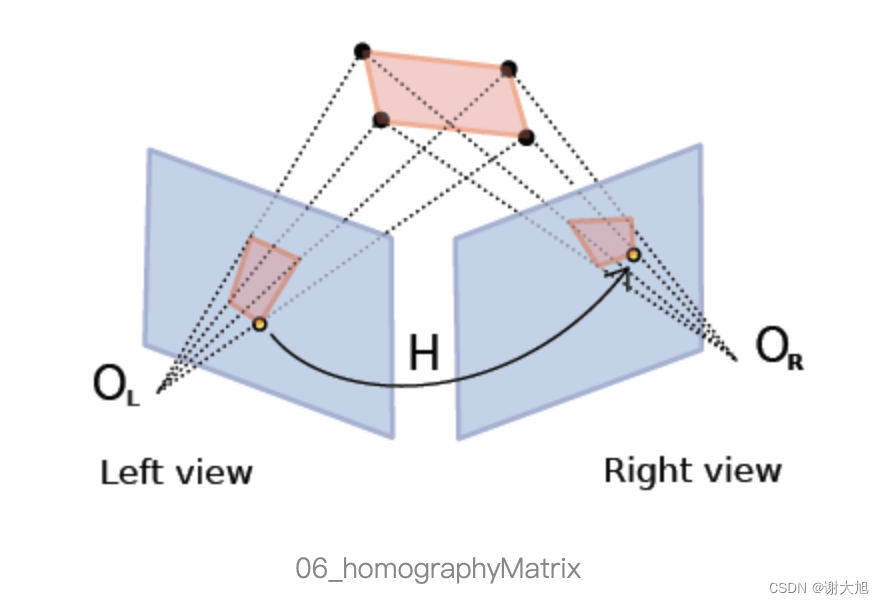
6、单应矩阵(Homography Matrix)
6.1 什么是单应矩阵
前面讨论基础矩阵的概念以及如何从一些匹配点对关系中求解基础矩阵。我们没有对关键点是否在一个平面上进行任何假设。但是,如果我们假设关键点在一个平面上,那么我们就可以使用单应矩阵(Homography Matrix)来求解相机之间的位姿。当匹配点对的关键点都是在3D空间中一个平面上时,这些点对关系可以通过单应矩阵来描述(相差一个常量系数)
备注:要求匹配点对应点对是3D空间,同一平面上的。
如下图:
6.2 单应矩阵的应用
- 相机位姿态求解
- 图像拼接
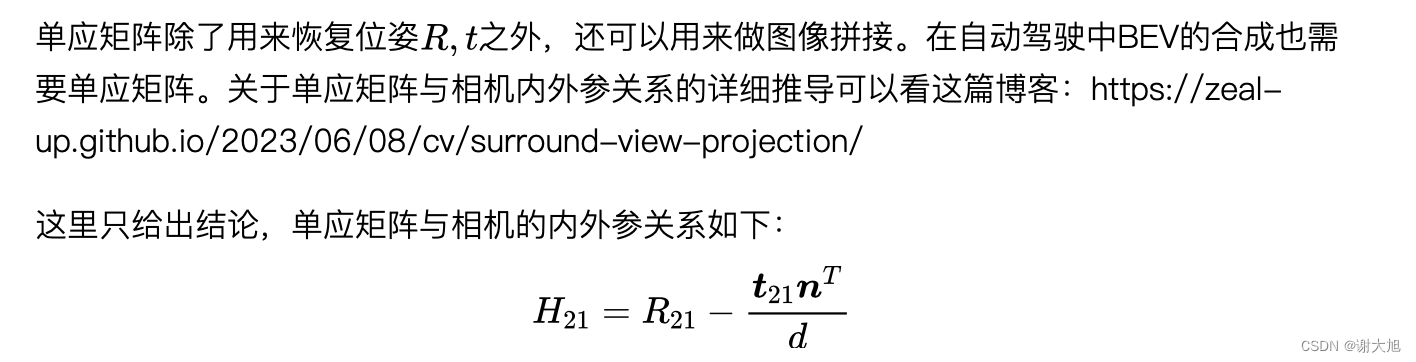
链接:
超详细!从单应矩阵推导到自动驾驶环视投影应用 | Zeal's Blog
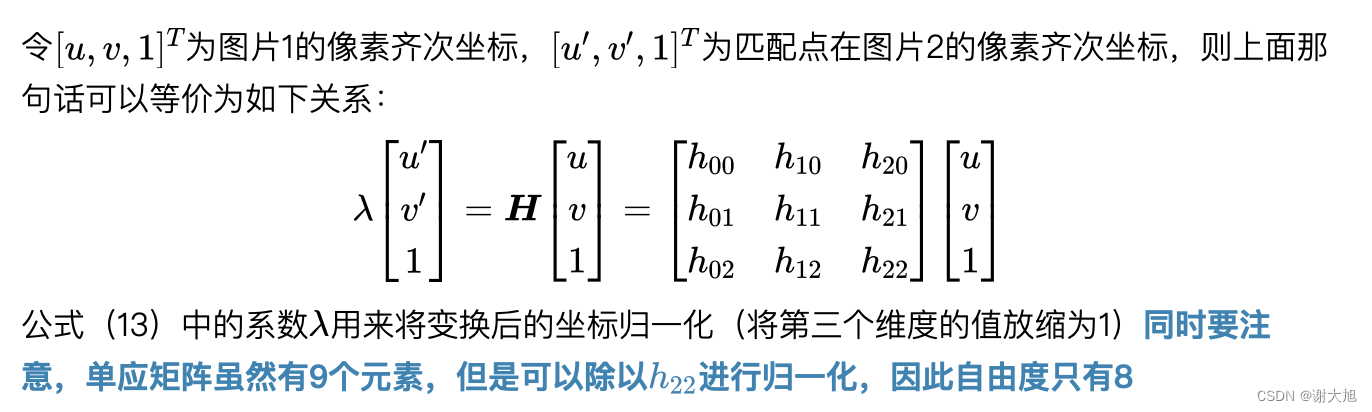
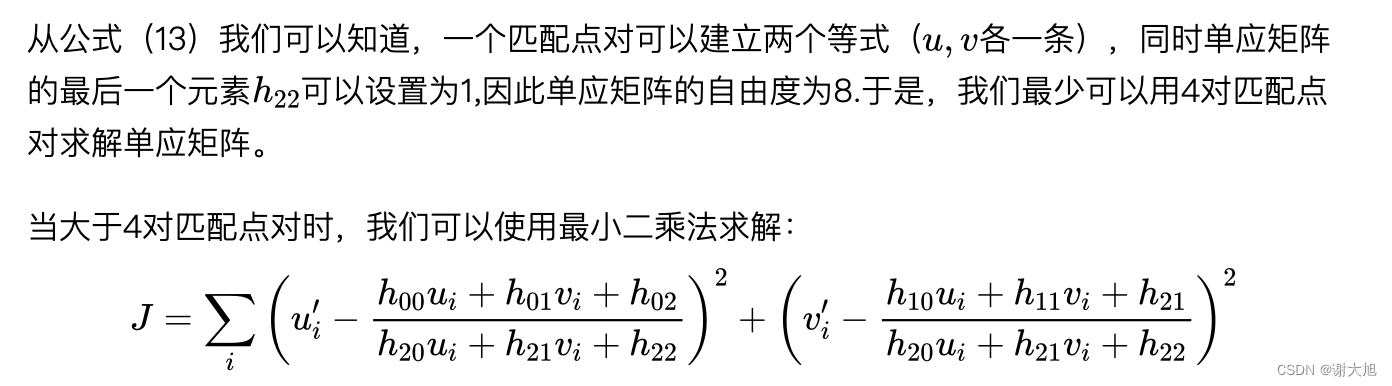
6.2 H矩阵求解
- 求解推导
- OpenCV接口

- 位姿求解
如何从H、E矩阵恢复R、t?
7.1 基础要点

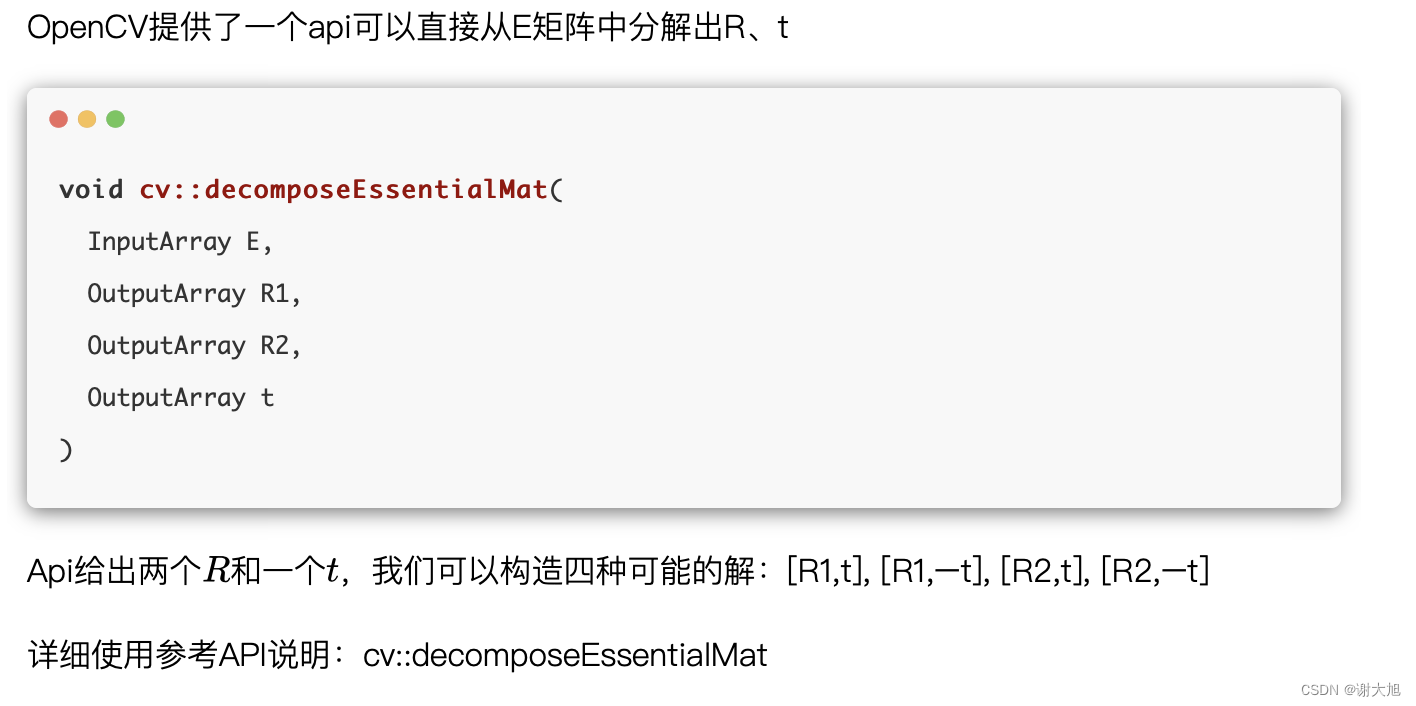
7.2 从E矩阵中恢复R、t
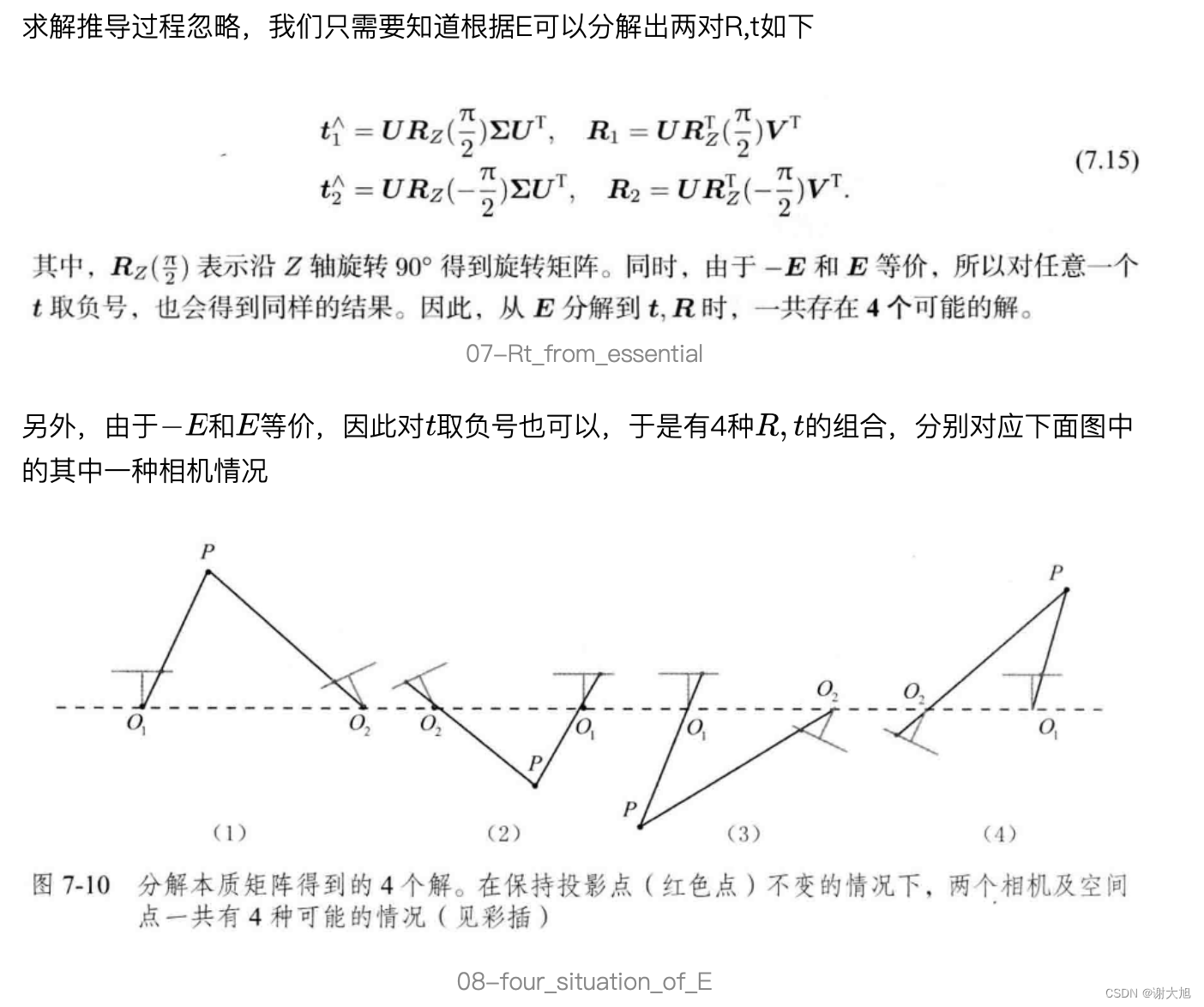
可使用opencv接口
7.3 从H矩阵中恢复R、t
从H矩阵恢复R、t有多种方法,论文中的方法叫Faugeras SVD-based decomposition,最终可以求解出8种解。另外一种有名的数值解法(通过奇异值分解)叫
SVD-based decomposition
OpenCV的接口使用的是分析解法:https://inria.hal.science/inria-00174036v3/documentOpenCV的接口最终返回4种解
OpenCV的接口使用说明:cv::decomposeHomographyMat
7.4 R、t值验证
从E、H分解出来的矩阵后,需要选择出正确的R、t
无论从E矩阵还是H矩阵中恢复出R、t,都会得到多种解。
我们需要从这些解中选择出正确的解。 最简单的做法是利用分解出的R、t对匹配点进行三角化,并检查该3D点在两个相机下的深度值,3D点必须在两个相机下都是正的才是正确的解。
对于单应矩阵的分解结果,OpenCV提供了一个函数可以帮助我们选择正确的解:cv::filterHomographyDecompByVisibleRefpoints
在ORB_SLAM中,对于每一种解,都会对所有匹配点进行三角化,对三角化出来的点,会进行很多步骤的检查,最后选择拥有最多内点的解作为正确的解。
备注:什么是内点?
7、三角化
7.1什么是三角化
当求解出位姿态后,需要利用位姿,联合匹配点关系,求解出三维点坐标。
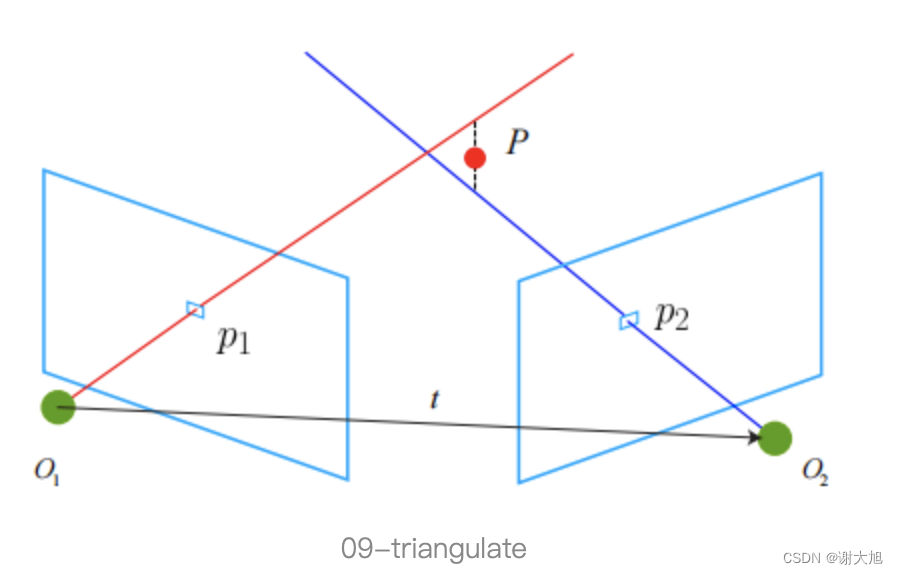

7.2 三角化求解
用SVD求解上述方程,求解出的3D坐标有4个元素,需要将第四个元素归一化为1。这里把ORB_SLAM的这部分代码也贴出来。
/**
* @brief 三角化获得三维点
* @param x_c1 点在关键帧1下的归一化坐标
* @param x_c2 点在关键帧2下的归一化坐标
* @param Tc1w 关键帧1投影矩阵 [K*R | K*t]
* @param Tc2w 关键帧2投影矩阵 [K*R | K*t]
* @param x3D 三维点坐标,作为结果输出
*/
bool GeometricTools::Triangulate(Eigen::Vector3f &x_c1, Eigen::Vector3f &x_c2, Eigen::Matrix<float,3,4> &Tc1w, Eigen::Matrix<float,3,4> &Tc2w,Eigen::Vector3f &x3D)
{Eigen::Matrix4f A;// x = a*P*X, 左右两面乘x的反对称矩阵 a*[x]^ * P * X = 0 ,[x]^*P构成了A矩阵,中间涉及一个尺度a,因为都是归一化平面,但右面是0所以直接可以约掉不影响最后的尺度// 0 -1 v P(0) -P.row(1) + v*P.row(2)// 1 0 -u * P(1) = P.row(0) - u*P.row(2) // -v u 0 P(2) u*P.row(1) - v*P.row(0)// 发现上述矩阵线性相关(第一行乘以-u加上第二行乘以-v等于第三行),所以取前两维,两个点构成了4行的矩阵(X分别投影到相机1和相机2),就是如下的操作,求出的是4维的结果[X,Y,Z,A],所以需要除以最后一维使之为1,就成了[X,Y,Z,1]这种齐次形式A.block<1,4>(0,0) = x_c1(0) * Tc1w.block<1,4>(2,0) - Tc1w.block<1,4>(0,0);A.block<1,4>(1,0) = x_c1(1) * Tc1w.block<1,4>(2,0) - Tc1w.block<1,4>(1,0);A.block<1,4>(2,0) = x_c2(0) * Tc2w.block<1,4>(2,0) - Tc2w.block<1,4>(0,0);A.block<1,4>(3,0) = x_c2(1) * Tc2w.block<1,4>(2,0) - Tc2w.block<1,4>(1,0);// 解方程 AX=0Eigen::JacobiSVD<Eigen::Matrix4f> svd(A, Eigen::ComputeFullV);Eigen::Vector4f x3Dh = svd.matrixV().col(3);if(x3Dh(3)==0)return false;// Euclidean coordinates
x3D = x3Dh.head(3)/x3Dh(3);return true;
}
也可以使用opencv接口进行三角化,且可以批量操作:cv::triangulatePoints。
8、关键步骤总结
- 特征点提取和匹配,得到如下效果

- 如何从匹配的特征点中,恢复相机之间的相对位姿
利用E、F矩阵怎么求解位姿态
利用H矩阵怎么求解位姿
利用H矩阵进行图像拼接
- 从矩阵中分解R、t
- 利用R、t进行三角化
9、参考资料
orbslam
ORB-SLAM3保姆级解析:地图初始化(基础矩阵/单应矩阵/三角化的实际应用)
激光slam
详解激光雷达点云处理那些事,点云预处理、感知、定位 - 哔哩哔哩 (bilibili.com)
立体几何
立体视觉入门指南(6):对级约束与Fusiello法极线校正 - 知乎 (zhihu.com)
视觉SLAM中的对极约束、三角测量、PnP、ICP问题
视觉SLAM中的对极约束、三角测量、PnP、ICP问题 - 古月居 (guyuehome.com)
相关文章:
orb-slam2学习总结
目录 视觉SLAM 1、地图初始化 2、ORB_SLAM地图初始化流程 3、ORB特征提取及匹配 1、对极几何 2、对极约束 (epipolar constraint) 3、基础矩阵F、本质矩阵E 5、单目尺度不确定性 6、单应矩阵(Homography Matrix) 6.1 什么是单应矩…...
通过wireshark判断web漏洞的流量特征
sql注入 定位http协议,通过查找get请求定位到关键字 抓到关键字union select xss 定位get请求的关键字 文件上传 找到对应的上传数据包,追踪tcp流 文件包含、文件读取 查看url找到包含的关键字 在根路径写入一个phpinfo(); 使用../进行目录遍…...

Command ‘npm‘ not found, but can be installed with:sudo apt install npm 解决方案
问题描述 今天在执行 npm install -g npx 报错 Command npm not found, but can be installed with: sudo apt install npm 解决方案 sudo apt-get remove npm sudo apt-get remove nodejs-legacy sudo apt-get remove nodejs sudo rm /usr/bin/node sudo apt-get install …...
【Hadoop_04】HDFS的API操作与读写流程
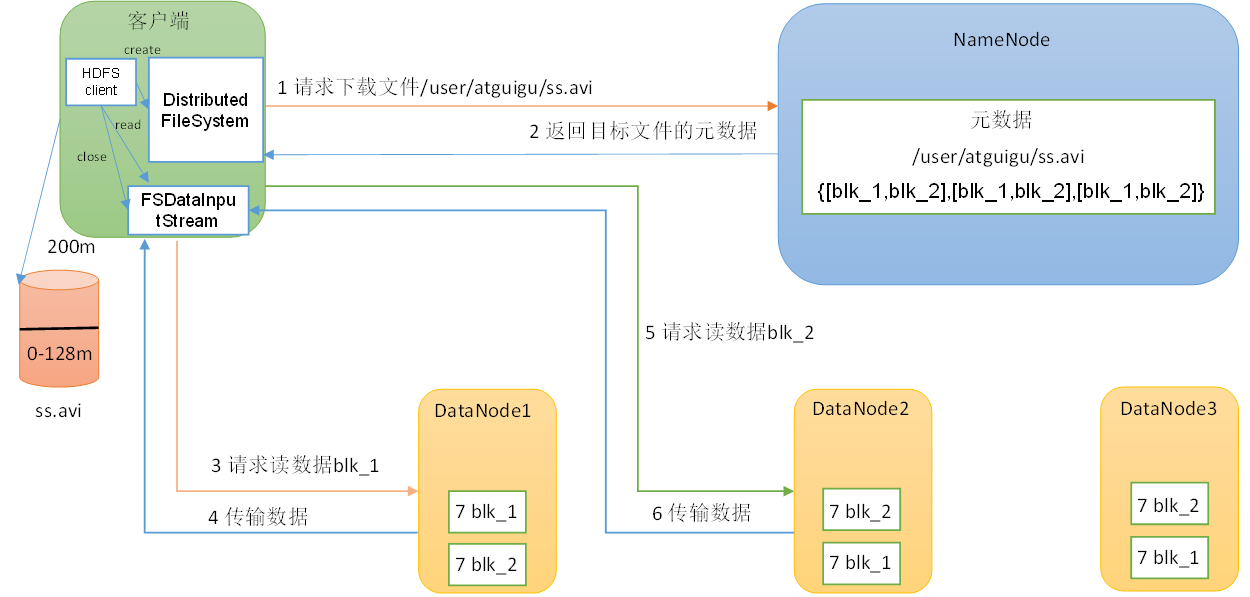
1、HDFS的API操作1.1 客户端环境准备1.2 API创建文件夹1.3 API上传1.4 API参数的优先级1.5 API文件夹下载1.6 API文件删除1.7 API文件更名和移动1.8 API文件详情和查看1.9 API文件和文件夹判断 2、HDFS的读写流程(面试重点)2.1 HDFS写数据流程2.2 网络拓…...

go-zero开发入门之网关往rpc服务传递数据
go-zero 的网关往 rpc 服务传递数据时,可以使用 headers,但需要注意前缀规则,否则会发现数据传递不过去,或者对方取不到数据。 go-zero 的网关对服务的调用使用了第三方库 grpcurl,入口函数为 InvokeRPC: …...
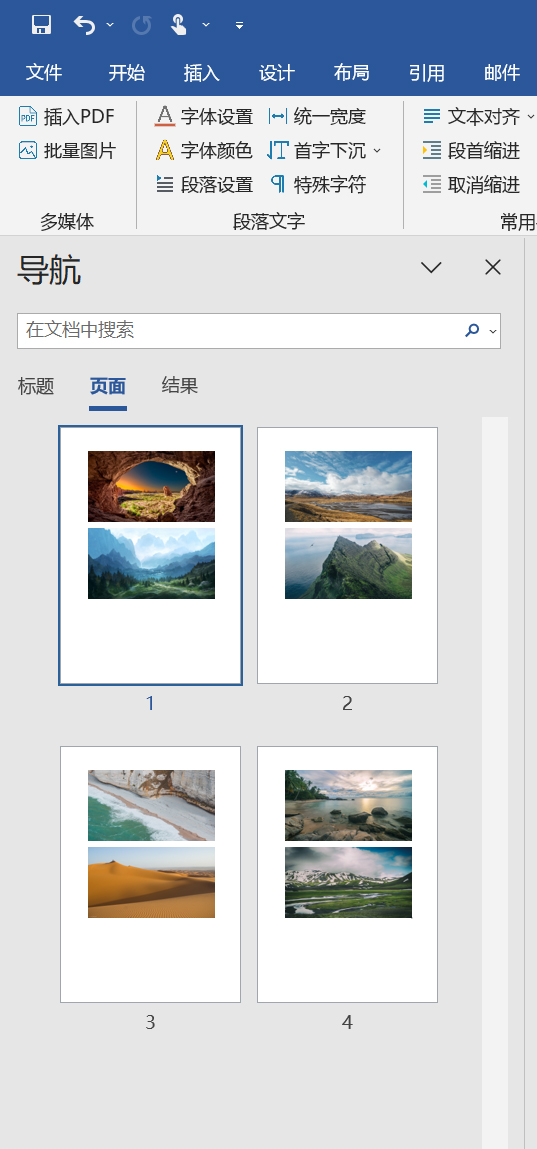
Word插件-好用的插件-批量插入图片-大珩助手
现有100张图片,需要批量插入word中,并在word中以每页6张图片的形式呈现,请问怎样做? 使用word大珩助手,多媒体-插入图片,根据图片的长宽,选择连续图片、一行2个图或一行3个图,可一次…...
小程序域名SSL证书能用免费的吗?
众所周知,目前小程序要求域名强制使用https协议,否则无法上线。但是对于大多数开发者来说,为每一个小程序都使用上付费的SSL证书,也是一笔不小的支出。那么小程序能使用免费的SSL证书吗? 答案是肯定的。目前市面上可选…...

selenium自动化(中)
显式等待与隐式等待 简介 在实际工作中等待机制可以保证代码的稳定性,保证代码不会受网速、电脑性能等条件的约束。 等待就是当运行代码时,如果页面的渲染速度跟不上代码的运行速度,就需要人为的去限制代码执行的速度。 在做 Web 自动化时…...

uniapp app将base64保存到相册,uniapp app将文件流保存到相册
如果是文件流可以先转base64详情见>uniapp 显示文件流图片-CSDN博客 onDown(){let base64 this.qrcodeUrl ; // base64地址const bitmap new plus.nativeObj.Bitmap("test");bitmap.loadBase64Data(base64, function() {const url "_doc/" new Dat…...
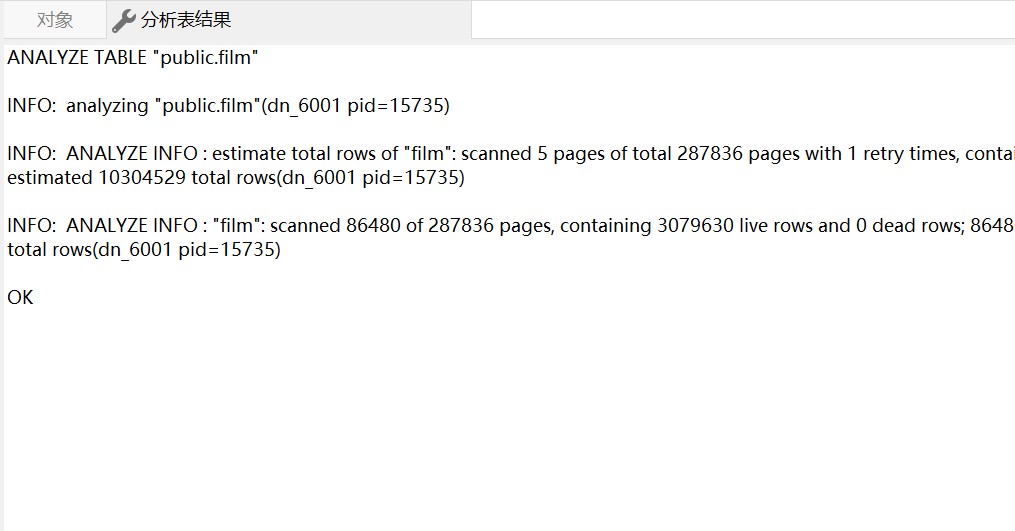
Navicat 技术指引 | 适用于 GaussDB 分布式的服务器对象的创建/设计
Navicat Premium(16.3.3 Windows版或以上)正式支持 GaussDB 分布式数据库。GaussDB分布式模式更适合对系统可用性和数据处理能力要求较高的场景。Navicat 工具不仅提供可视化数据查看和编辑功能,还提供强大的高阶功能(如模型、结构…...
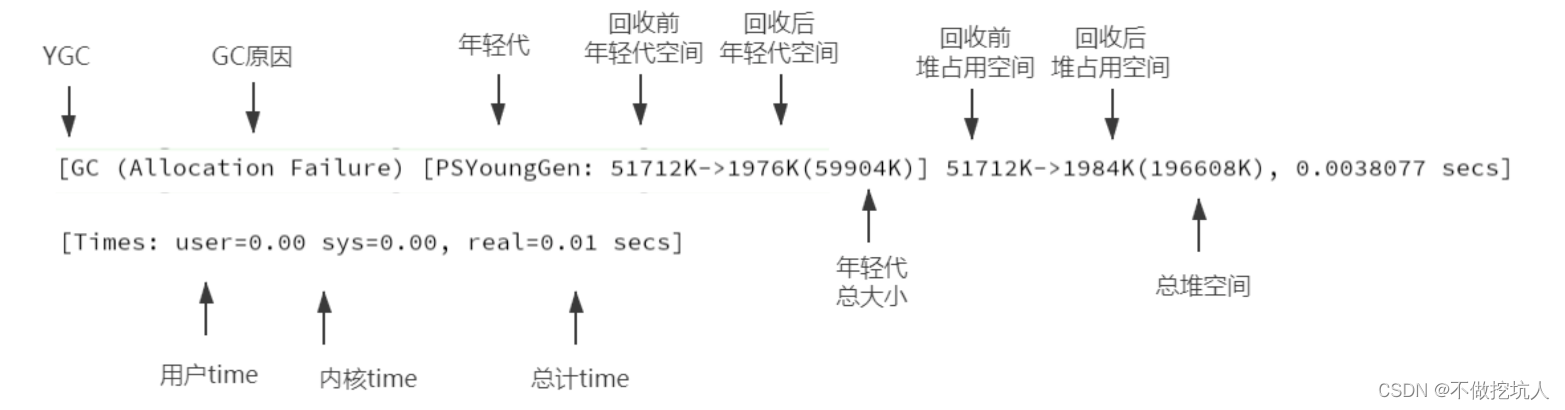
五、HotSpot细节实现
一、并发标记与三色标记 问题:三色标记到底发生在什么阶段,替代了什么。并发标记 1、并发标记( Concurrent Marking) 从 GC Root 开始对堆中对象进行可达性分析,递归扫描整个堆里的对象图,找出要回收的对象,这阶段耗…...
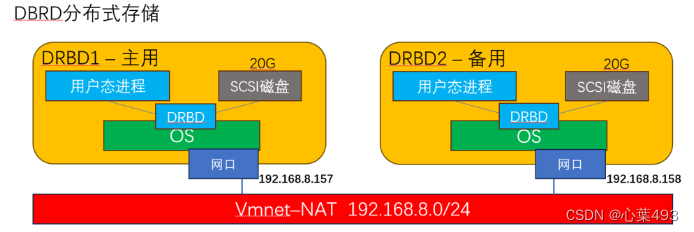
DRBD分布式存储实验
DRBD DRBD的全称为:Distributed Replicated Block Device (DRBD) 分布式块设备复制 与心跳连接结合使用,构建高可用性(HA)的集群。 实现方式是通过网络来镜像(mirror)整个设备。它允许用户在远程机器上建立一个本地块设备的实时镜像。DRBD负责接收数据…...

go的结构体作为返回值
结构体有两种方式作为返回值 结构体结构体指针 代码 package mainimport ("fmt" )type SS struct {Name stringAge int }func getInfo() (*SS) {var ac SS{}ac.Age 1return &ac }func getInfo1() (aa *SS) {aa.Age 1return }func getInfo2() (SS) {var ac…...
谷歌地图问题)
uniapp的subnvue苹果适配(ios)谷歌地图问题
谷歌地图,google地图,调整宽度。这个适配花了点时间,苹果IOS宽度一直无效失灵,赶紧记录分享,很坑。可能所有的ios的subnvue适配都这样。看了网上很多方法无效,最终找到试出答案。 pages.json的配置宽度无效…...
项目实战之RabbitMQ重试机制进行消息补偿通知
🧑💻作者名称:DaenCode 🎤作者简介:啥技术都喜欢捣鼓捣鼓,喜欢分享技术、经验、生活。 😎人生感悟:尝尽人生百味,方知世间冷暖。 文章目录 🌟架构图&#x…...

MySQL之数据库的创建指令
创建数据库 #创建数据库指令: CREATE DATABASE hsp_db1 #创建名字为关键字的数据库,为规避关键字,可以使用反引号 CREATE DATABASE CREATE#删除数据库指令: DROP DATABASE hsp_db1 DROP DATABASE CREATE如果不指定在这里插入代码片…...
编写)
[网络安全]批处理(脚本)编写
Windows DOS命令Linux 一.作用: 自上而下成批次处理每一条命令,直到执行到最后一条 二.如何创建批处理: 扩展名:.bat创建办法:新建一个记事本,把扩展名改为 .bat 三.编辑方法: 右击 -编辑 1).一行一个命令 四.批处理命令: pause 暂停 (及时后面有命令,也不执行)echo …...
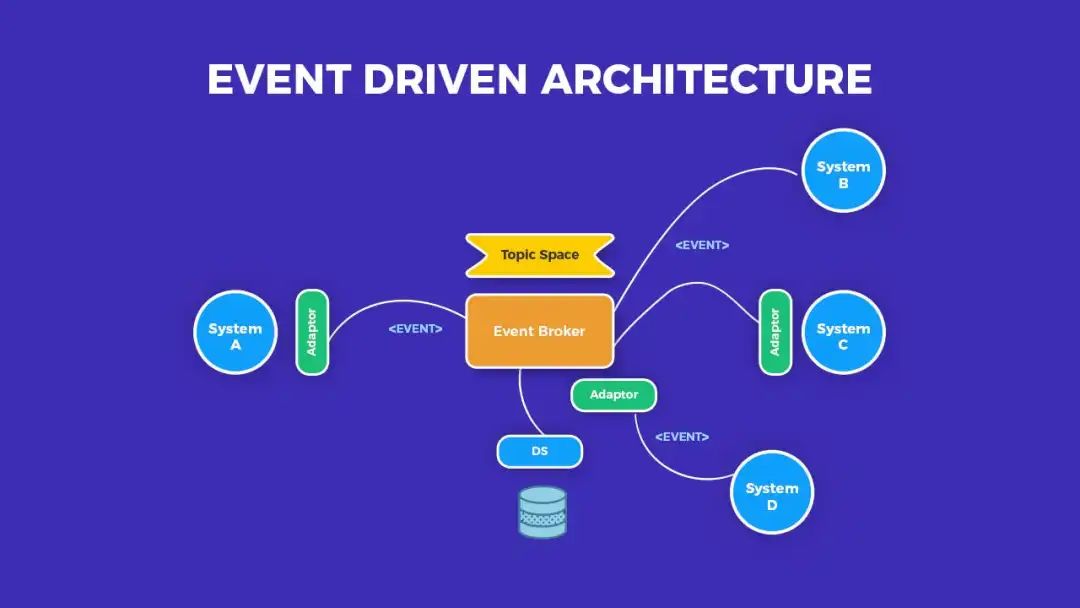
事件驱动架构 vs. RESTful架构:通信模式对比与选择
1. 通信风格 事件驱动架构(EDA) 是一种异步通信风格,组件之间通过产生和消费事件进行通信。 事件是表示系统中重大变化或事件的消息,并分发给感兴趣的组件。这种通信模型允许系统的不同部分之间进行解耦和动态交互。 组件充当事件…...

代码随想录算法训练营第五十二天| 300 最长递增子序列 674 最长连续递增子序列 718 最长重复子数组
目录 300 最长递增子序列 674 最长连续递增子序列 718 最长重复子数组 300 最长递增子序列 class Solution { public:int lengthOfLIS(vector<int>& nums) {vector<int>dp(nums.size(),1);//以i结尾的最长递增子序列的长度for(int i 0;i < nums.size()…...
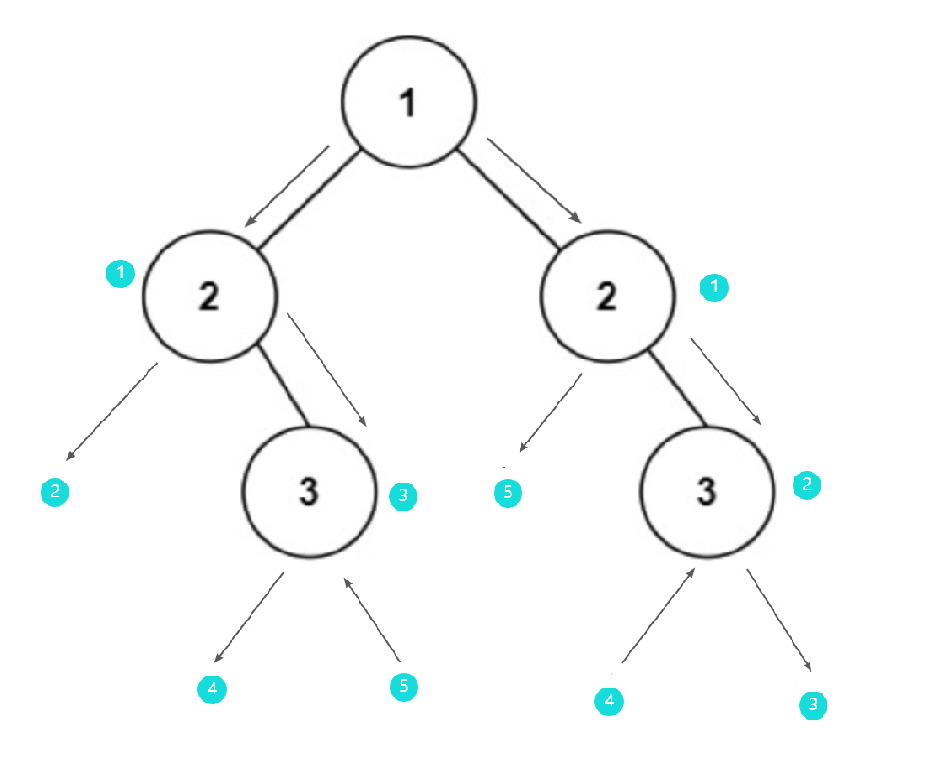
leetcode 101.对称二叉树
学习这部分还是要多画图,多思考 101.对称二叉树 题目 给你一个二叉树的根节点 root , 检查它是否轴对称。 题目链接 力扣(LeetCode)官网 - 全球极客挚爱的技术成长平台 文字 和 画图 分析 明确结束条件和继续递归条件 判断是否对称…...

基于大模型的 UI 自动化系统
基于大模型的 UI 自动化系统 下面是一个完整的 Python 系统,利用大模型实现智能 UI 自动化,结合计算机视觉和自然语言处理技术,实现"看屏操作"的能力。 系统架构设计 #mermaid-svg-2gn2GRvh5WCP2ktF {font-family:"trebuchet ms",verdana,arial,sans-…...

ES6从入门到精通:前言
ES6简介 ES6(ECMAScript 2015)是JavaScript语言的重大更新,引入了许多新特性,包括语法糖、新数据类型、模块化支持等,显著提升了开发效率和代码可维护性。 核心知识点概览 变量声明 let 和 const 取代 var…...
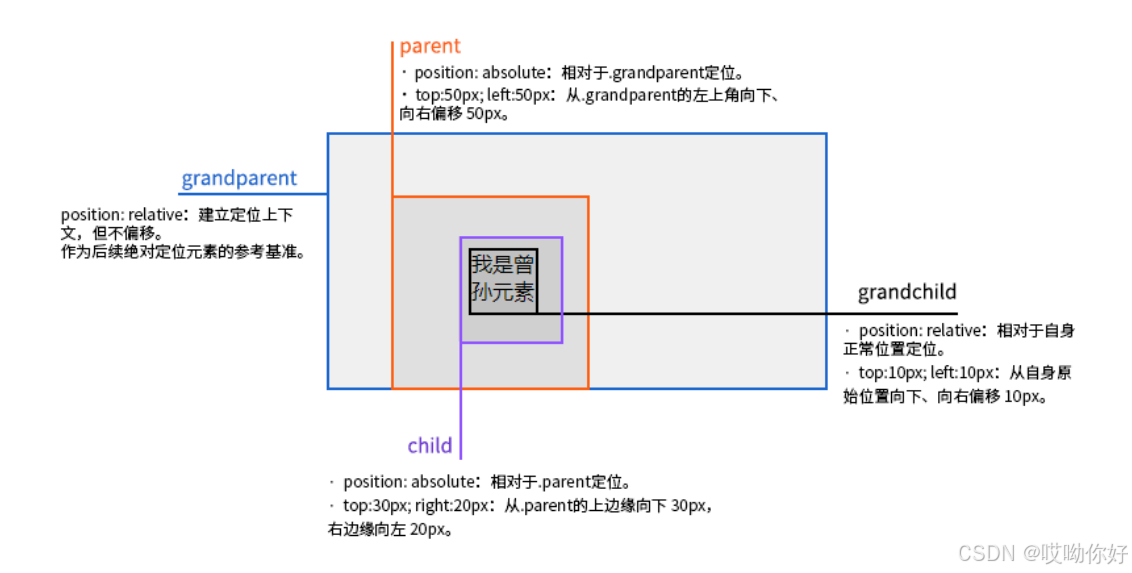
【CSS position 属性】static、relative、fixed、absolute 、sticky详细介绍,多层嵌套定位示例
文章目录 ★ position 的五种类型及基本用法 ★ 一、position 属性概述 二、position 的五种类型详解(初学者版) 1. static(默认值) 2. relative(相对定位) 3. absolute(绝对定位) 4. fixed(固定定位) 5. sticky(粘性定位) 三、定位元素的层级关系(z-i…...

成都鼎讯硬核科技!雷达目标与干扰模拟器,以卓越性能制胜电磁频谱战
在现代战争中,电磁频谱已成为继陆、海、空、天之后的 “第五维战场”,雷达作为电磁频谱领域的关键装备,其干扰与抗干扰能力的较量,直接影响着战争的胜负走向。由成都鼎讯科技匠心打造的雷达目标与干扰模拟器,凭借数字射…...
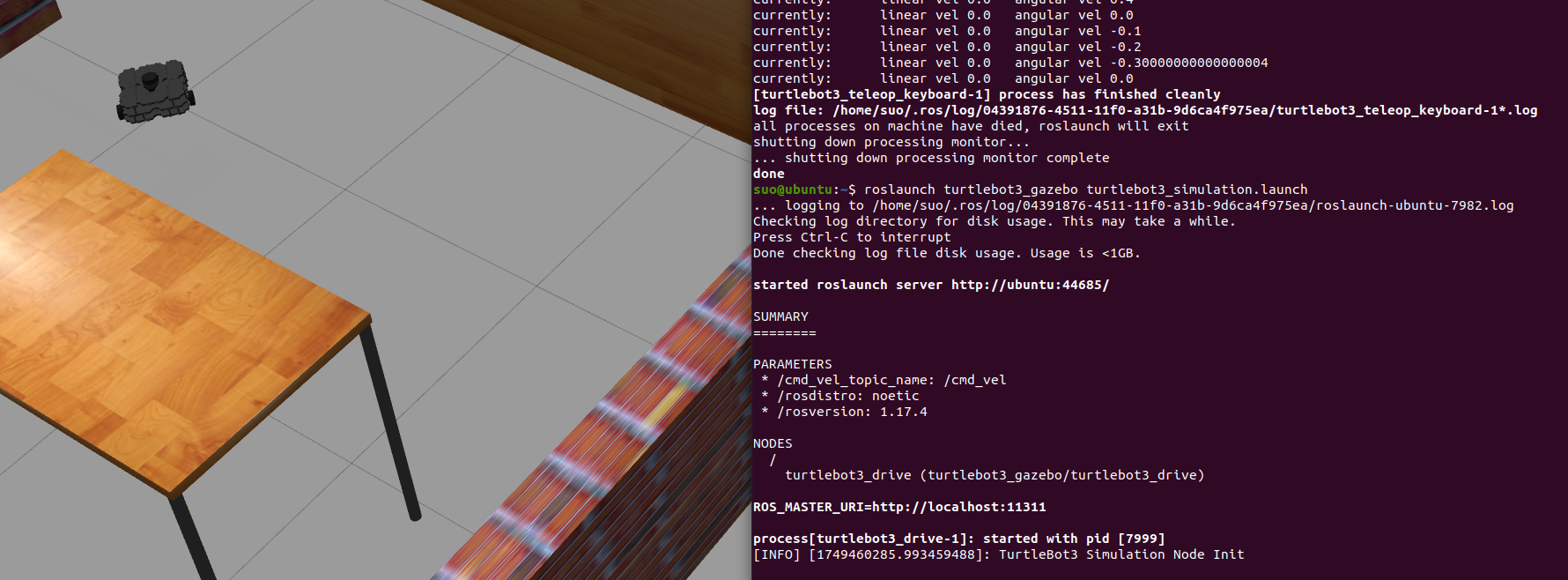
基于TurtleBot3在Gazebo地图实现机器人远程控制
1. TurtleBot3环境配置 # 下载TurtleBot3核心包 mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src git clone -b noetic-devel https://github.com/ROBOTIS-GIT/turtlebot3.git git clone -b noetic https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git git clone -b noetic-dev…...
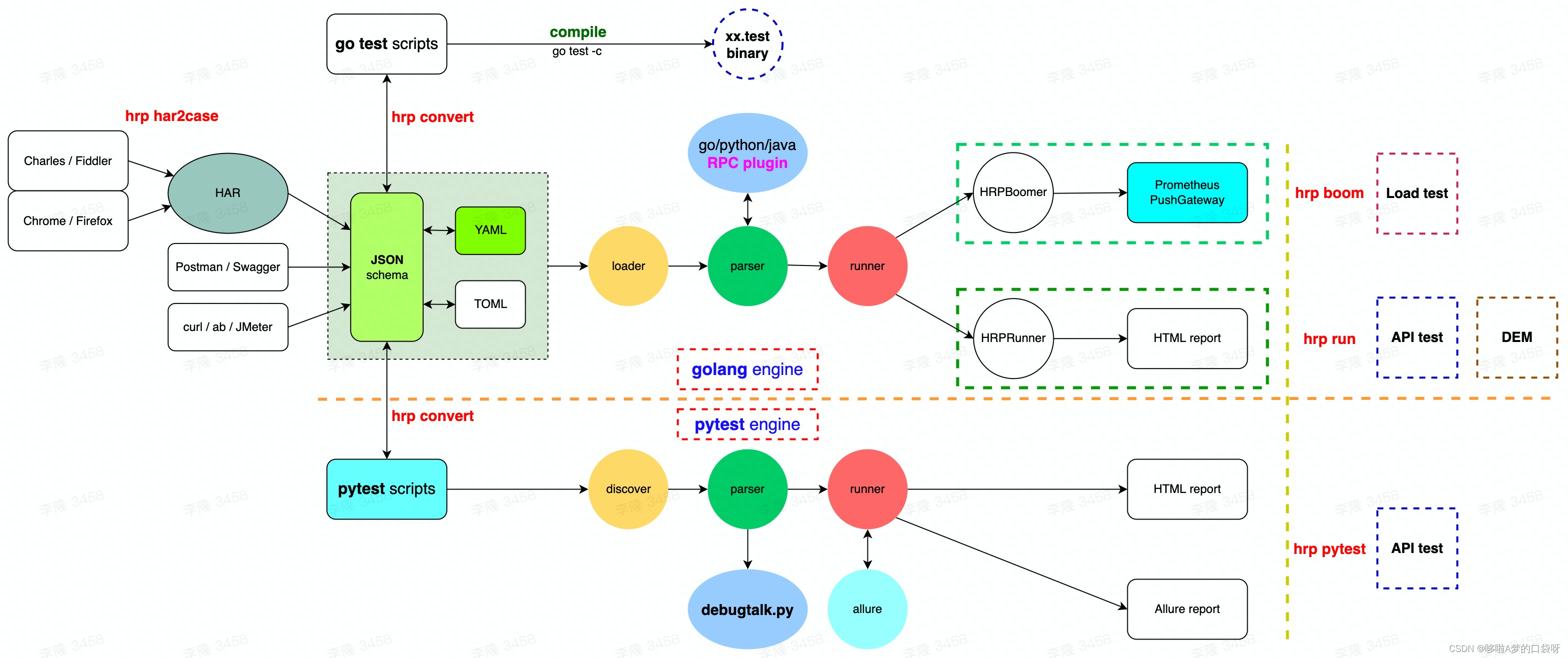
接口自动化测试:HttpRunner基础
相关文档 HttpRunner V3.x中文文档 HttpRunner 用户指南 使用HttpRunner 3.x实现接口自动化测试 HttpRunner介绍 HttpRunner 是一个开源的 API 测试工具,支持 HTTP(S)/HTTP2/WebSocket/RPC 等网络协议,涵盖接口测试、性能测试、数字体验监测等测试类型…...
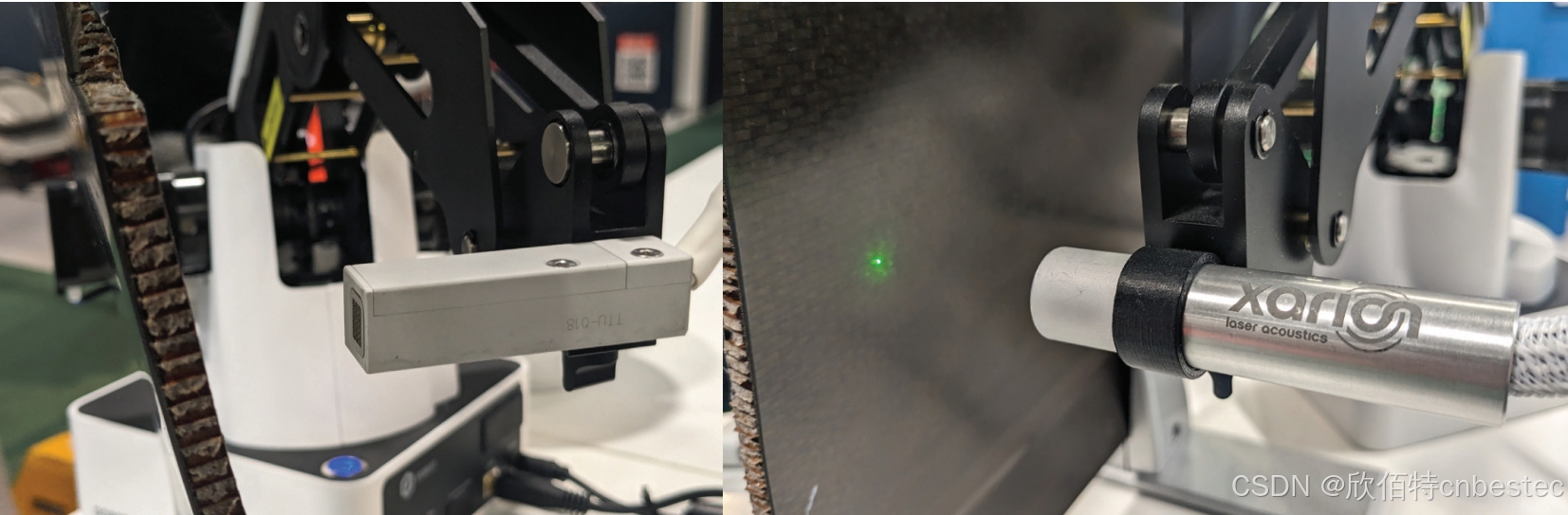
解析奥地利 XARION激光超声检测系统:无膜光学麦克风 + 无耦合剂的技术协同优势及多元应用
在工业制造领域,无损检测(NDT)的精度与效率直接影响产品质量与生产安全。奥地利 XARION开发的激光超声精密检测系统,以非接触式光学麦克风技术为核心,打破传统检测瓶颈,为半导体、航空航天、汽车制造等行业提供了高灵敏…...
ui框架-文件列表展示
ui框架-文件列表展示 介绍 UI框架的文件列表展示组件,可以展示文件夹,支持列表展示和图标展示模式。组件提供了丰富的功能和可配置选项,适用于文件管理、文件上传等场景。 功能特性 支持列表模式和网格模式的切换展示支持文件和文件夹的层…...

TJCTF 2025
还以为是天津的。这个比较容易,虽然绕了点弯,可还是把CP AK了,不过我会的别人也会,还是没啥名次。记录一下吧。 Crypto bacon-bits with open(flag.txt) as f: flag f.read().strip() with open(text.txt) as t: text t.read…...

数据库正常,但后端收不到数据原因及解决
从代码和日志来看,后端SQL查询确实返回了数据,但最终user对象却为null。这表明查询结果没有正确映射到User对象上。 在前后端分离,并且ai辅助开发的时候,很容易出现前后端变量名不一致情况,还不报错,只是单…...