AR-LDM原理及代码分析
- AR-LDM原理
- AR-LDM代码分析
- pytorch_lightning(pl)的hook流程
- main.py 具体分析
- Train
- Sample
- LightningDataset
- ARLDM
- blip mm encoder
AR-LDM原理
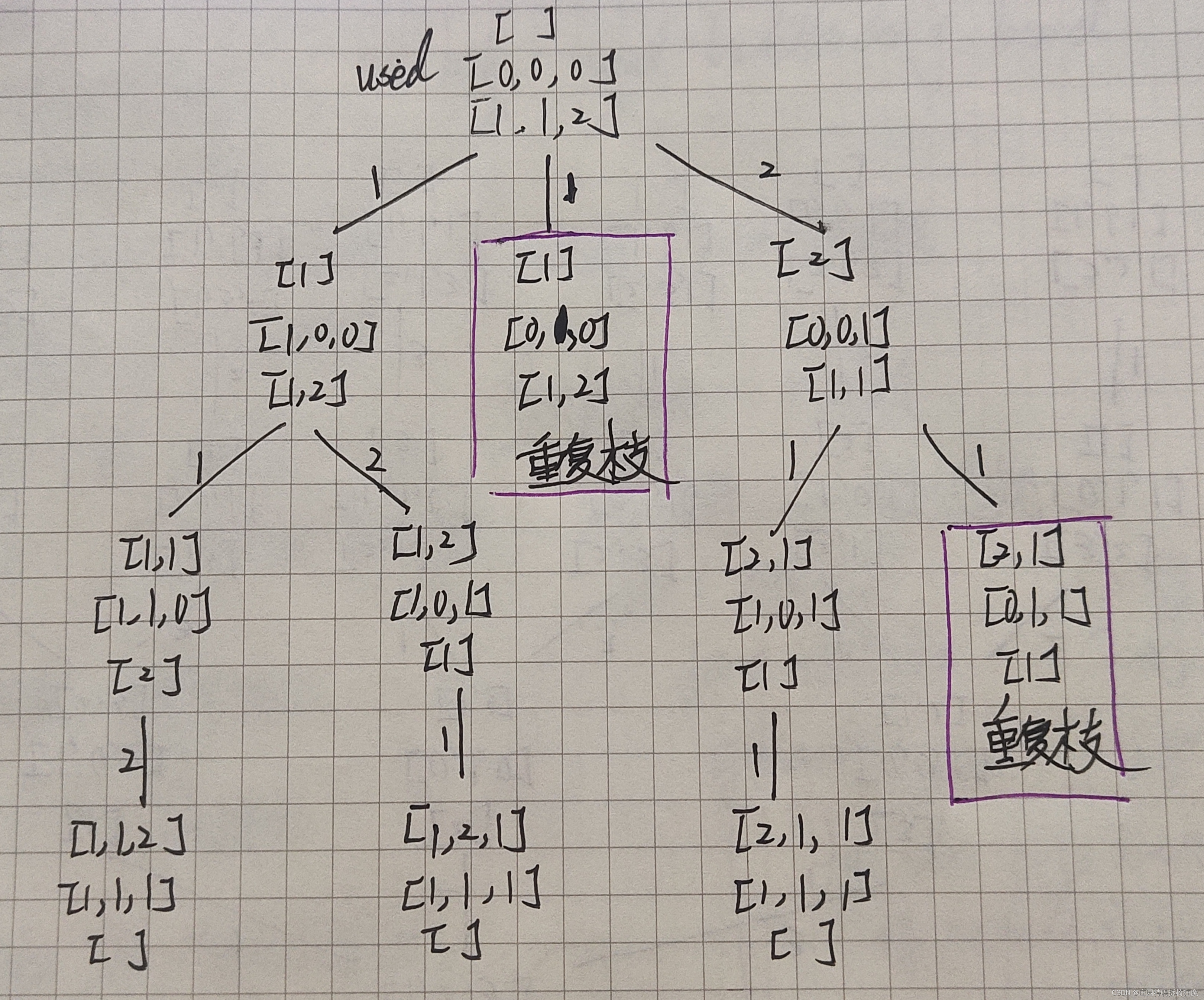
左边是模仿了自回归地从1, 2, ..., j-1来构造 j 时刻的 frame 的过程。
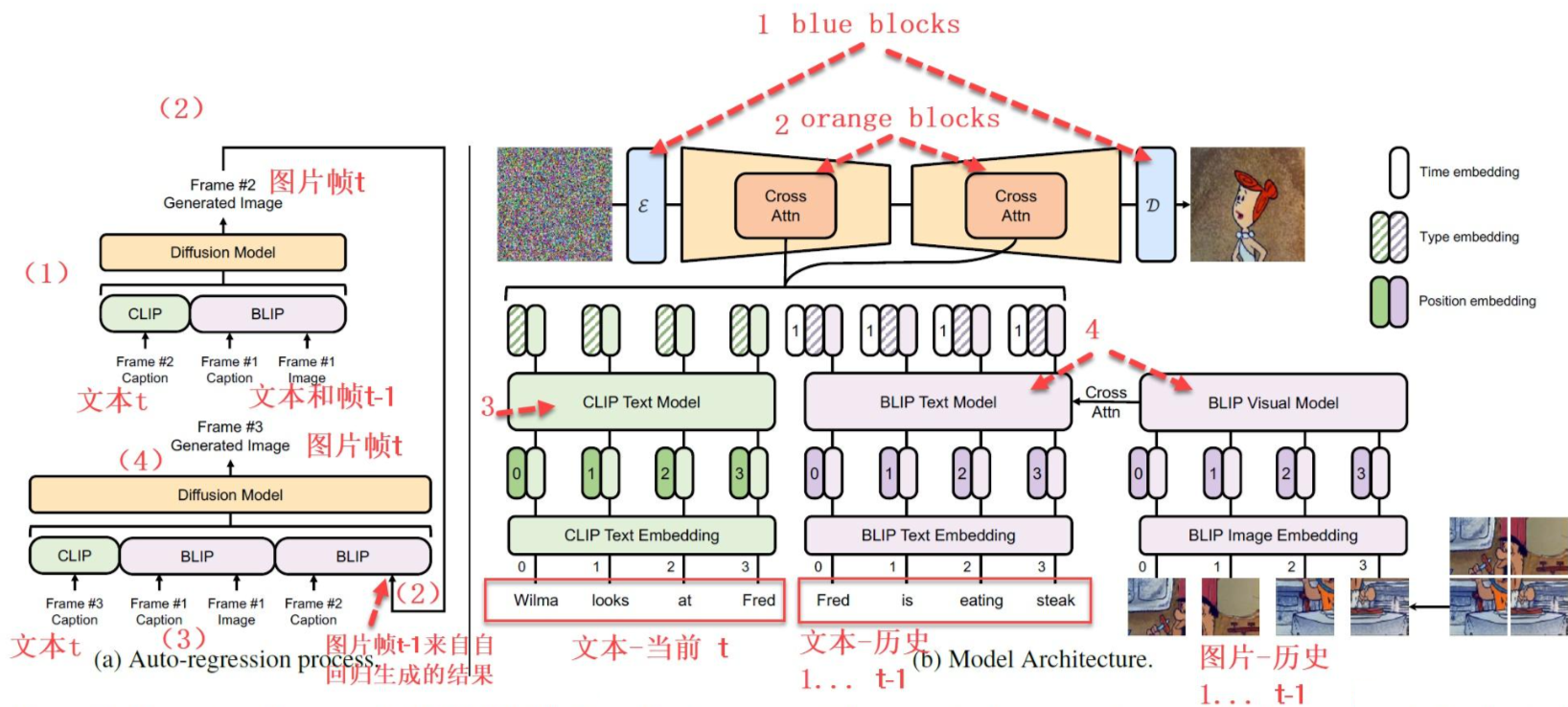
在普通Stable Diffusion的基础上,使用了1, 2, ..., j-1 时刻的文本信息 history text prompt(BLIP编码)、1, 2, ..., j-1 时刻的参考视频帧history frame(BLIP编码)、当前 j 时刻frame的 text prompt(CLIP编码),作为condition φ j \varphi_j φj 来引导第 j 帧的生成。公式表达如下:
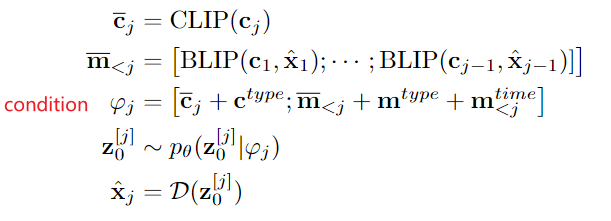
其中,注意 ① c t y p e ∈ R D c^{type}\in R^D ctype∈RD是当前 j 时刻视频帧的 text prompt 的 type embedding、② m t y p e ∈ R D m^{type}\in R^D mtype∈RD是1, 2, ..., j-1 时刻视频帧的 history text prompt 或 history frame 的 type embedding、③ m t i m e ∈ R L × D m^{time}\in R^{L\times D} mtime∈RL×D是1, 2, ..., j-1 时刻视频帧的 history text prompt 或 history frame 的 frame time embedding(表示第几帧)。
另外,为了适应没有见过的新角色,添加一个新token<char>来表示没见过的字符,新token的embedding<char>由相似单词的embedding初始化,如“man”或“woman”,然后在4-5张图像上,微调AR-LDM(除了VAE的参数不变)将其扩展到<char>字符。
AR-LDM代码分析
项目架构
├── README.md
├── requirements.txt
├── utils
│ ├── utils.py
│ └── __init__.py
├── data_script
│ └── flintsones_hdf5.py
│ └── pororo_hdf5.py
│ └── vist_hdf5.py
│ └── vist_img_download.py
├── dataset
│ └── flintsones.py
│ └── pororo.py
│ └── vistdii.py
│ └── vistsis.py
├── models
│ ├── blip_override
│ ├── blip.py
│ ├── med.py
│ ├── med_config.json
│ ├── vit.py
│ └── diffusers_override
│ ├── attention.py
│ ├── unet_2d_blocks.py
│ ├── unet_2d_condition.py
│ └── inception.py
└── main.py
包含模块:Auto-Regressive Models 、Latent Diffusion Models、BLIP(多模态编码器 )、CLIP(文本编码器)
pytorch_lightning(pl)的hook流程
1、三个函数
- 初始化
def __init__(self) - 训练
training_step(self, batch, batch_idx) - 验证
validation_step(self, batch, batch_idx) - 测试
test_step(self, batch, batch_idx)
为了方便我们实现其他的一些功能,因此更为完整的流程是在training_step 、validation_step、test_step 后面都紧跟着其相应的 training_step_end(self,batch_parts)和training_epoch_end(self, training_step_outputs) 函数。
当然,对于验证和测试,都有相应的*_step_end和*_epoch_end函数。因为验证和测试的*_step_end函数是一样的,因此这里只以训练为例。
注意:在新版本的PL中*_step_end和*_epoch_end等hook函数,已经更新为on_*_step_end和on_*_epoch_end !!!
2、示例
-
*_step_end– 即每一个 * 步完成后调用 -
*_epoch_end– 即每一个 * 的epoch 完成之后会自动调用
def training_step(self, batch, batch_idx):x, y = batchy_hat = self.model(x)loss = F.cross_entropy(y_hat, y)pred = ...return {'loss': loss, 'pred': pred}def training_step_end(self, batch_parts):'''当gpus=0 or 1时,这里的batch_parts即为traing_step的返回值(已验证)当gpus>1时,这里的batch_parts为list,list中每个为training_step返回值,list[i]为i号gpu的返回值(这里未验证)'''gpu_0_prediction = batch_parts[0]['pred']gpu_1_prediction = batch_parts[1]['pred']# do something with both outputsreturn (batch_parts[0]['loss'] + batch_parts[1]['loss']) / 2def training_epoch_end(self, training_step_outputs):'''当gpu=0 or 1时,training_step_outputs为list,长度为steps的数量(不包括validation的步数,当你训练时,你会发现返回list<训练时的steps数,这是因为训练时显示的steps数据还包括了validation的,若将limit_val_batches=0.,即关闭validation,则显示的steps会与training_step_outputs的长度相同)。list中的每个值为字典类型,字典中会存有`training_step_end()`返回的键值,键名为`training_step()`函数返回的变量名,另外还有该值是在哪台设备上(哪张GPU上),例如{device='cuda:0'}'''for out in training_step_outputs:# do something with preds
main.py 具体分析
Train
训练主要是重写def training_setp(self, batch, batch_idx)函数,并返回要反向传播的loss即可,其中batch 即为从 train_dataloader 采样的一个batch的数据,batch_idx即为目前batch的索引。
def train(args: DictConfig) -> None:# 实例化dataset和dataloader,并设置为train_modedataloader = LightningDataset(args)dataloader.setup('fit')# 定义AR-LDM模型model = ARLDM(args, steps_per_epoch=dataloader.get_length_of_train_dataloader())# pl的Loggerlogger = TensorBoardLogger(save_dir=os.path.join(args.ckpt_dir, args.run_name), name='log', default_hp_metric=False)# 定义保存模型Checkpoint的callback,自动保存top_0好的权重(即不保存),只保存lastcheckpoint_callback = ModelCheckpoint(dirpath=os.path.join(args.ckpt_dir, args.run_name),save_top_k=0,save_last=True)# 记录学习率的变化的callback, 并绘制到tensorboardlr_monitor = LearningRateMonitor(logging_interval='step')# callback函数的listcallback_list = [lr_monitor, checkpoint_callback]# 定义PL_Trainertrainer = pl.Trainer(accelerator='gpu',devices=args.gpu_ids,max_epochs=args.max_epochs,benchmark=True,logger=logger,log_every_n_steps=1,callbacks=callback_list,strategy=DDPStrategy(find_unused_parameters=False))# 开始训练trainer.fit(model, dataloader, ckpt_path=args.train_model_file)
Sample
在pytoch_lightning框架中,test 在训练过程中是不调用的,也就是说是不相关,在训练过程中只进行training和validation,因此如果需要在训练过中保存validation的一些信息,就要放到validation中。
关于推理,推理是在训练完成之后的,因此这里假设已经训练完成.
首先进行断言assert判断,assert xxx,"error info", xxx正确则往下进行,错误则抛出异常信息"error info"
def sample(args: DictConfig) -> None:assert args.test_model_file is not None, "test_model_file cannot be None"assert args.gpu_ids == 1 or len(args.gpu_ids) == 1, "Only one GPU is supported in test mode"# 实例化dataset和dataloader,并设置为train_modedataloader = LightningDataset(args)dataloader.setup('test')# 定义AR-LDM模型model = ARLDM.load_from_checkpoint(args.test_model_file, args=args, strict=False)# 定义PL_Trainerpredictor = pl.Trainer(accelerator='gpu',devices=args.gpu_ids,max_epochs=-1,benchmark=True)# 开始推理predictions = predictor.predict(model, dataloader)# 保存推理结果imagesimages = [elem for sublist in predictions for elem in sublist[0]]if not os.path.exists(args.sample_output_dir):try:os.mkdir(args.sample_output_dir)except:passfor i, image in enumerate(images):image.save(os.path.join(args.sample_output_dir, '{:04d}.png'.format(i)))# 计算FIDif args.calculate_fid:ori = np.array([elem for sublist in predictions for elem in sublist[1]])gen = np.array([elem for sublist in predictions for elem in sublist[2]])fid = calculate_fid_given_features(ori, gen)print('FID: {}'.format(fid))
LightningDataset
Lightning只需要一个 DataLoader对与训练集/交叉验证集/测试集分割。
数据集有两种实现方法:
(1)直接在Model中实现
直接实现是指在Model中重写def train_dataloader(self)等函数来返回dataloader:
当然,首先要自己先实现Dataset的定义,可以用现有的,例如MNIST等数据集,若用自己的数据集,则需要自己去继承torch.utils.data.dataset.Dataset。
(2)自定义继承DataModule
这种方法是继承pl.LightningDataModule来提供训练、校验、测试的数据。在重载xxx_dataloader()时,返回的data_loader需要使用torch.utils.data.DataLoader
class LightningDataset(pl.LightningDataModule):def __init__(self, args: DictConfig):super(LightningDataset, self).__init__()self.kwargs = {"num_workers": args.num_workers, "persistent_workers": True if args.num_workers > 0 else False,"pin_memory": True}self.args = args
self.args表示任何多个无名参数v,它是一个tuple(数据不可变)self.kwargs表示关键字参数k:v,它是一个dict;- 同时使用
*args和**kwargs时,必须*args参数列要在**kwargs前
def setup(self, stage="fit"):if self.args.dataset == "pororo":import datasets.pororo as dataelif self.args.dataset == 'flintstones':import datasets.flintstones as dataelif self.args.dataset == 'vistsis':import datasets.vistsis as dataelif self.args.dataset == 'vistdii':import datasets.vistdii as dataelse:raise ValueError("Unknown dataset: {}".format(self.args.dataset))if stage == "fit":self.train_data = data.StoryDataset("train", self.args)self.val_data = data.StoryDataset("val", self.args)if stage == "test":self.test_data = data.StoryDataset("test", self.args)
setup():实现数据集Dataset的定义,每张GPU都会执行该函数stage:用于标记是用于什么阶段,训练fit,测试test
def train_dataloader(self):if not hasattr(self, 'trainloader'):self.trainloader = DataLoader(self.train_data, batch_size=self.args.batch_size, shuffle=True, **self.kwargs)return self.trainloaderdef val_dataloader(self):return DataLoader(self.val_data, batch_size=self.args.batch_size, shuffle=False, **self.kwargs)def test_dataloader(self):return DataLoader(self.test_data, batch_size=self.args.batch_size, shuffle=False, **self.kwargs)def predict_dataloader(self):return DataLoader(self.test_data, batch_size=self.args.batch_size, shuffle=False, **self.kwargs)def get_length_of_train_dataloader(self):if not hasattr(self, 'trainloader'):self.trainloader = DataLoader(self.train_data, batch_size=self.args.batch_size, shuffle=True, **self.kwargs)return len(self.trainloader)
-
if not hasattr():用来判断self(对象object)中是否含有名为’trainloader’的属性(属性或者方法) ,没有则利用Dataset重新定义 。 -
shuffle:是洗牌打乱的意思。- 若
shuffle = True,在一个epoch之后,对所有的数据随机打乱,再按照设定好的每个批次的大小划分批次。(先打乱,再取batch) - 若
shuffle = False,每次的输出结果都一样,并且与原文件的数据存储顺序保持一致。数据会按照我们设定的Batch_size大小依次分组,依次排序。
- 若
ARLDM
首先我们需要一个基础的pytorch lightning模型。定义如下,这个基础模型是作为训练其中参数model而存在的。
LightningModule 定义了一个系统而不是一个模型。包括三个核心组件:
- 模型
- 优化器
- Train/Val/Test步骤
(1)数据流伪代码:
outs = []
for batch in data:out = training_step(batch)outs.append(out)
# 执行完1个epoch后执行training_epoch_end
training_epoch_end(outs)
(2)等价Lightning代码:
def training_step(self, batch, batch_idx):prediction = ...return predictiondef training_epoch_end(self, training_step_outputs):for prediction in predictions:# do something with these
具体代码
一个 AR-LDM Pytorch-Lighting 模型在本项目中含有的部件是:
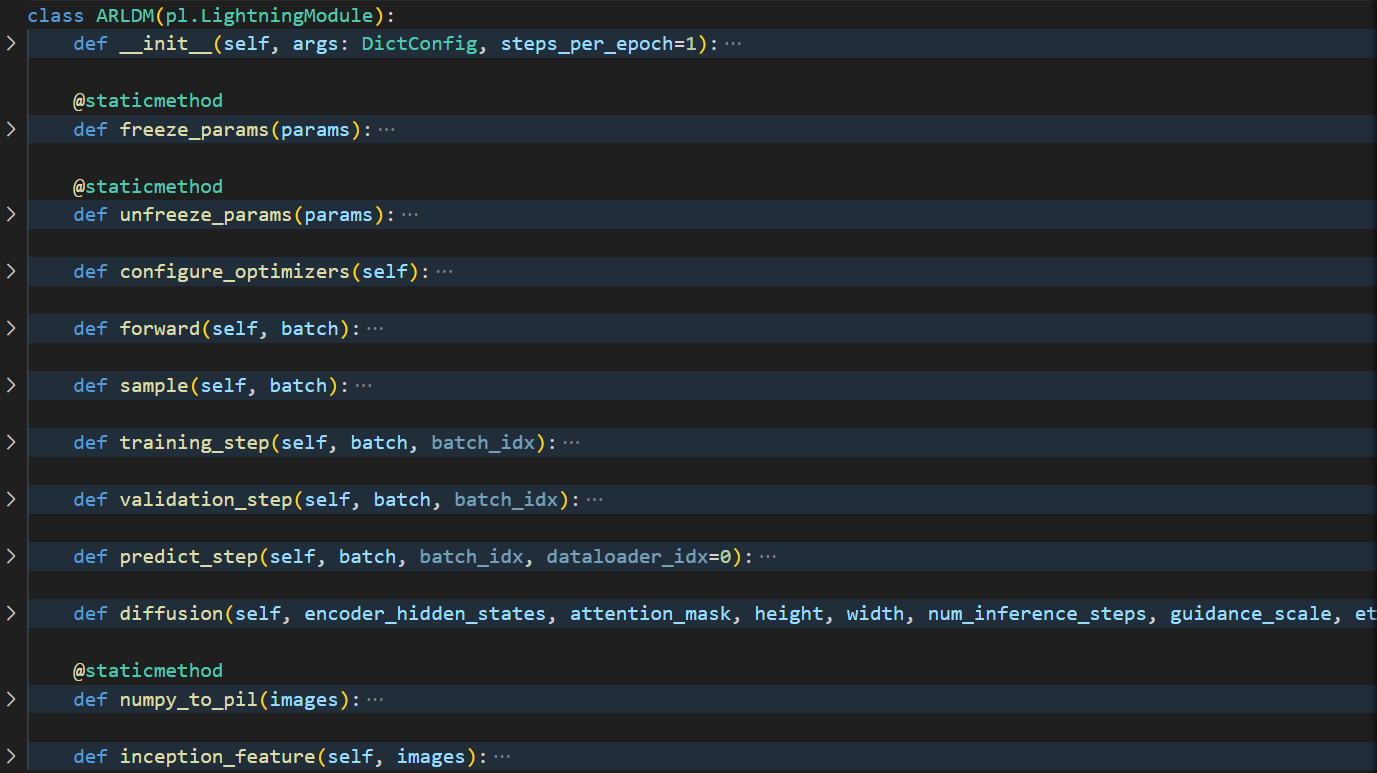
(1)training_step(self, batch, batch_idx)
即:每个batch的处理函数,self(batch)实际上等价于forward(batch)。
def training_step(self, batch, batch_idx):loss = self(batch)self.log('loss/train_loss', loss, on_step=True, on_epoch=False, sync_dist=True, prog_bar=True)return loss
- 参数:
batch (Tensor | (Tensor, …) | [Tensor, …]) – The output of your DataLoader. A tensor, tuple or list.
batch_idx (int) – Integer displaying index of this batch
optimizer_idx (int) – When using multiple optimizers, this argument will also be present.
hiddens (Tensor) – Passed in if truncated_bptt_steps > 0. - 返回值:Any of.
Tensor - The loss tensor
dict - A dictionary. Can include any keys, but must include the key ‘loss’
None - Training will skip to the next batch
e.g. 返回值无论如何也需要有一个loss量。如果是字典,要有这个key=loss。没loss这个batch就被跳过了。
def training_step(self, batch, batch_idx):x, y, z = batchout = self.encoder(x)loss = self.loss(out, x)return loss# Multiple optimizers (e.g.: GANs)
def training_step(self, batch, batch_idx, optimizer_idx):if optimizer_idx == 0:# do training_step with encoderif optimizer_idx == 1:# do training_step with decoder# Truncated back-propagation through time
def training_step(self, batch, batch_idx, hiddens):# hiddens are the hidden states from the previous truncated backprop step...out, hiddens = self.lstm(data, hiddens)...return {'loss': loss, 'hiddens': hiddens}
(2)predict_step(self, batch, batch_idx, dataloader_idx=0):
传入数据batch进行一次推理,直接调用 self.sample(batch)进行采样生成图像;然后判断是否需要计算FID值,如果需要计算Inception_Feature返回。同时返回生成的图像image。
def predict_step(self, batch, batch_idx, dataloader_idx=0):original_images, images = self.sample(batch)if self.args.calculate_fid:original_images = original_images.cpu().numpy().astype('uint8')original_images = [Image.fromarray(im, 'RGB') for im in original_images]ori = self.inception_feature(original_images).cpu().numpy()gen = self.inception_feature(images).cpu().numpy()else:ori = Nonegen = Nonereturn images, ori, gen
(3)configure_optimizers()
进行优化器创建,返回一个优化器,或数个优化器,或两个List(优化器,Scheduler)。本项目使用单优化器:
def configure_optimizers(self):optimizer = torch.optim.AdamW(self.parameters(), lr=self.args.init_lr, weight_decay=1e-4)scheduler = LinearWarmupCosineAnnealingLR(optimizer,warmup_epochs=self.args.warmup_epochs * self.steps_per_epoch,max_epochs=self.args.max_epochs * self.steps_per_epoch)optim_dict = {'optimizer': optimizer,'lr_scheduler': {'scheduler': scheduler, # The LR scheduler instance (required)'interval': 'step', # The unit of the scheduler's step size}}return optim_dict
warmup lr策略就是在网络训练初期用比较小的学习率,线性增长到初始设定的学习率。
在优化过程中选择优化器和学习率调度器,通常只需要一个,但对于GAN之类的可能需要多个optimizer。如:
- 单个优化器:
def configure_optimizers(self):return Adam(self.parameters(), lr=1e-3)
- 多个优化器(比如GAN)
def configure_optimizers(self):generator_opt = Adam(self.model_gen.parameters(), lr=0.01)disriminator_opt = Adam(self.model_disc.parameters(), lr=0.02) return generator_opt, disriminator_opt
- 可以修改frequency键,来控制优化频率:
def configure_optimizers(self):gen_opt = Adam(self.model_gen.parameters(), lr=0.01)dis_opt = Adam(self.model_disc.parameters(), lr=0.02)n_critic = 5 return ({"optimizer": dis_opt, "frequency": n_critic},{"optimizer": gen_opt, "frequency": 1} )
- 多个优化器和多个调度器或学习率字典(比如GAN)
def configure_optimizers(self):generator_opt = Adam(self.model_gen.parameters(), lr=0.01)disriminator_opt = Adam(self.model_disc.parameters(), lr=0.02)discriminator_sched = CosineAnnealing(discriminator_opt, T_max=10)return [generator_opt, disriminator_opt], [discriminator_sched]def configure_optimizers(self):generator_opt = Adam(self.model_gen.parameters(), lr=0.01)disriminator_opt = Adam(self.model_disc.parameters(), lr=0.02)discriminator_sched = CosineAnnealing(discriminator_opt, T_max=10)return {"optimizer": [generator_opt, disriminator_opt], "lr_scheduler": [discriminator_sched]}
对于学习率调度器LR scheduler:可以修改其属性
{"scheduler": lr_scheduler, # 调度器"interval": "epoch", # 调度的单位,epoch或step"frequency": 1, # 调度的频率,多少轮一次 "reduce_on_plateau": False, # ReduceLROnPlateau "monitor": "val_loss", # ReduceLROnPlateau的监控指标 "strict": True # 如果没有monitor,是否中断训练}def configure_optimizers(self):gen_opt = Adam(self.model_gen.parameters(), lr=0.01)dis_opt = Adam(self.model_disc.parameters(), lr=0.02)gen_sched = {"scheduler": ExponentialLR(gen_opt, 0.99), "interval": "step"}dis_sched = CosineAnnealing(discriminator_opt, T_max=10)return [gen_opt, dis_opt], [gen_sched, dis_sched]
(4)freeze_params 和 unfreeze_params:
将param的requires_grad 设置为False
@staticmethoddef freeze_params(params):for param in params:param.requires_grad = False@staticmethoddef unfreeze_params(params):for param in params:param.requires_grad = True
(5)初始化ARLDM __init__
- 读取config参数
- 在self中注册CLIP, BLIP Null token
- 实例化
Type_embeddings layer、Time_embeddings layer、BLIP multi-modal embedding layer、CLIP text embedding layer、CLIP text tokenizer、BLIP text tokenizer、BLIP image processor、VAE,UNet,noise_scheduler; - 为Sample模式创建InceptionV3,方便计算FID指标
- 根据config,为CLIP和BLIP进行resize
position_embeddings和token_embeddings - 冻结 vae, unet, clip, blip 的参数
def __init__(self, args: DictConfig, steps_per_epoch=1):super(ARLDM, self).__init__()self.steps_per_epoch = steps_per_epoch # len(data_loader)"""Configurations"""self.args = argsself.task = args.task # continuationif args.mode == 'sample':# noise scheduler if args.scheduler == "pndm":self.scheduler = PNDMScheduler(beta_start=0.00085, beta_end=0.012, beta_schedule="scaled_linear",skip_prk_steps=True)elif args.scheduler == "ddim":self.scheduler = DDIMScheduler(beta_start=0.00085, beta_end=0.012, beta_schedule="scaled_linear",clip_sample=False, set_alpha_to_one=True)else:raise ValueError("Scheduler not supported")# fid data arguementself.fid_augment = transforms.Compose([transforms.Resize([64, 64]),transforms.ToTensor(),transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)),])# InceptionV3 settingblock_idx = InceptionV3.BLOCK_INDEX_BY_DIM[2048]self.inception = InceptionV3([block_idx])"""Modules"""# CLIP text tokenizerself.clip_tokenizer = CLIPTokenizer.from_pretrained('runwayml/stable-diffusion-v1-5', subfolder="tokenizer")# BLIP text tokenizerself.blip_tokenizer = init_tokenizer()# BLIP image processor(arguement)self.blip_image_processor = transforms.Compose([transforms.Resize([224, 224]),transforms.ToTensor(),transforms.Normalize([0.48145466, 0.4578275, 0.40821073], [0.26862954, 0.26130258, 0.27577711])])self.max_length = args.get(args.dataset).max_length# register tensor buffer CLIP, BLIP Null token in selfblip_image_null_token = self.blip_image_processor(Image.fromarray(np.zeros((224, 224, 3), dtype=np.uint8))).unsqueeze(0).float()clip_text_null_token = self.clip_tokenizer([""], padding="max_length", max_length=self.max_length, return_tensors="pt").input_idsblip_text_null_token = self.blip_tokenizer([""], padding="max_length", max_length=self.max_length, return_tensors="pt").input_idsself.register_buffer('clip_text_null_token', clip_text_null_token)self.register_buffer('blip_text_null_token', blip_text_null_token)self.register_buffer('blip_image_null_token', blip_image_null_token)# type_embeddings layerself.modal_type_embeddings = nn.Embedding(2, 768)# time_embeddings layerself.time_embeddings = nn.Embedding(5, 768)# blip multi-modal embedding layerself.mm_encoder = blip_feature_extractor(pretrained='https://storage.googleapis.com/sfr-vision-language-research/BLIP/models/model_large.pth', image_size=224, vit='large')self.mm_encoder.text_encoder.resize_token_embeddings(args.get(args.dataset).blip_embedding_tokens)# clip text embedding layerself.text_encoder = CLIPTextModel.from_pretrained('runwayml/stable-diffusion-v1-5', subfolder="text_encoder")# resize_token_embeddings:根据不同的dataset从config读取不同的clip_embedding_tokensself.text_encoder.resize_token_embeddings(args.get(args.dataset).clip_embedding_tokens)# resize_position_embeddingsold_embeddings = self.text_encoder.text_model.embeddings.position_embeddingnew_embeddings = self.text_encoder._get_resized_embeddings(old_embeddings, self.max_length)self.text_encoder.text_model.embeddings.position_embedding = new_embeddingsself.text_encoder.config.max_position_embeddings = self.max_lengthself.text_encoder.max_position_embeddings = self.max_lengthself.text_encoder.text_model.embeddings.position_ids = torch.arange(self.max_length).expand((1, -1))# vae, unet, noise_scheduler self.vae = AutoencoderKL.from_pretrained('runwayml/stable-diffusion-v1-5', subfolder="vae")self.unet = UNet2DConditionModel.from_pretrained('runwayml/stable-diffusion-v1-5', subfolder="unet")self.noise_scheduler = DDPMScheduler(beta_start=0.00085, beta_end=0.012, beta_schedule="scaled_linear", num_train_timesteps=1000)# Freeze vae, unet, clip, blipself.freeze_params(self.vae.parameters())if args.freeze_resnet:self.freeze_params([p for n, p in self.unet.named_parameters() if "attentions" not in n])if args.freeze_blip and hasattr(self, "mm_encoder"):self.freeze_params(self.mm_encoder.parameters())self.unfreeze_params(self.mm_encoder.text_encoder.embeddings.word_embeddings.parameters())if args.freeze_clip and hasattr(self, "text_encoder"):self.freeze_params(self.text_encoder.parameters())self.unfreeze_params(self.text_encoder.text_model.embeddings.token_embedding.parameters())
(6)forward:train_step使用forward计算每一个step(每一batch数据)的loss。只有训练、验证、测试时候使用。推理时不用(推理时用sample)。
def forward(self, batch):# set clip and blip eval modeif self.args.freeze_clip and hasattr(self, "text_encoder"):self.text_encoder.eval()if self.args.freeze_blip and hasattr(self, "mm_encoder"):self.mm_encoder.eval()"""images = torch.stack([self.augment(im) for im in images[1:]])captions, attention_mask = clip_tokenizer(texts[1:])['input_ids'], clip_tokenizer(texts[1:])['attention_mask']source_images = torch.stack([self.blip_image_processor(im) for im in images])source_caption, source_attention_mask = blip_tokenizer(texts)['input_ids'], blip_tokenizer(texts)['attention_mask']"""# current frame and caption = {images, captions, attention_mask} 范围从1开始# history frames and captions = {source_images, source_caption, source_attention_mask} 范围从0开始images, captions, attention_mask, source_images, source_caption, source_attention_mask = batchB, V, S = captions.shape # (batch_size, caption_len, caption_embedding_dim)# src_V是全部captions的个数(包括第一帧)src_V = V + 1 if self.task == 'continuation' else V# 将输入的张量展平为一维images = torch.flatten(images, 0, 1)captions = torch.flatten(captions, 0, 1)attention_mask = torch.flatten(attention_mask, 0, 1)source_images = torch.flatten(source_images, 0, 1) # (B * V, S, 1)source_caption = torch.flatten(source_caption, 0, 1)source_attention_mask = torch.flatten(source_attention_mask, 0, 1)# attention_mask = 1 代表该位置有单词;attention_mask = 0 代表该位置无单词,被padding# 随机生成一个bool index数组,用于选择一部分caption embedding进行特殊处理classifier_free_idx = np.random.rand(B * V) < 0.1# 使用 clip text_encoder 对 caption 进行编码,得到 caption_embeddingscaption_embeddings = self.text_encoder(captions, attention_mask).last_hidden_state # (B * V, S, D)# 使用 blip multimodal_encoder 对 history images和caption 进行联合编码,得到 source_embeddingssource_embeddings = self.mm_encoder(source_images, source_caption, source_attention_mask,mode='multimodal').reshape(B, src_V * S, -1) # (B, V * S, D)# 对source_embeddings进行tensor的repeat操作,以便与caption_embeddings的形状匹配source_embeddings = source_embeddings.repeat_interleave(V, dim=0) # (B * V, V * S, D)# 对caption_embeddings和source_embeddings进行一系列的加法操作,以引入模态type_embedding和time_embeddingcaption_embeddings[classifier_free_idx] = \self.text_encoder(self.clip_text_null_token).last_hidden_state[0]source_embeddings[classifier_free_idx] = \self.mm_encoder(self.blip_image_null_token, self.blip_text_null_token, attention_mask=None,mode='multimodal')[0].repeat(src_V, 1)caption_embeddings += self.modal_type_embeddings(torch.tensor(0, device=self.device))source_embeddings += self.modal_type_embeddings(torch.tensor(1, device=self.device))source_embeddings += self.time_embeddings(torch.arange(src_V, device=self.device).repeat_interleave(S, dim=0))# 对caption_embeddings和source_embeddings在dim=1上进行拼接# 得到编码器的隐藏状态(encoder_hidden_states)作为CrossAttn的KV送入Unetencoder_hidden_states = torch.cat([caption_embeddings, source_embeddings], dim=1) # 对attention_mask进行拼接和处理,生成一个新的attention_maskattention_mask = torch.cat([attention_mask, source_attention_mask.reshape(B, src_V * S).repeat_interleave(V, dim=0)], dim=1)attention_mask = ~(attention_mask.bool()) # B * V, (src_V + 1) * Sattention_mask[classifier_free_idx] = False# 生成一个方形掩码(square_mask),然后将其与attention_mask的最后一部分进行逻辑或操作。square_mask = torch.triu(torch.ones((V, V), device=self.device)).bool() # B, V, V, Ssquare_mask = square_mask.unsqueeze(0).unsqueeze(-1).expand(B, V, V, S)square_mask = square_mask.reshape(B * V, V * S)attention_mask[:, -V * S:] = torch.logical_or(square_mask, attention_mask[:, -V * S:])# VAE 编码 images 为 latentslatents = self.vae.encode(images).latent_dist.sample()latents = latents * 0.18215# 生成随机噪声并使用 noise_scheduler 对latents添加噪声noise = torch.randn(latents.shape, device=self.device)bsz = latents.shape[0]timesteps = torch.randint(0, self.noise_scheduler.num_train_timesteps, (bsz,), device=self.device).long()noisy_latents = self.noise_scheduler.add_noise(latents, noise, timesteps)# 用UNet计算noisy_latents的噪声(但并未进行去噪)noise_pred = self.unet(noisy_latents, timesteps, encoder_hidden_states, attention_mask).sample# 然后计算噪声预测与真实噪声之间的均方误差损失(MSE Loss)作为最终的损失值。最后返回损失值loss = F.mse_loss(noise_pred, noise, reduction="none").mean([1, 2, 3]).mean()return loss
(7)sample:推理时,调用sample,传入一个batch的数据(original_images, captions, attention_mask, source_images, source_caption, source_attention_mask),返回生成的image。前面和forward几乎一样,不同的是for循环自回归的生成每一帧。
def sample(self, batch):original_images, captions, attention_mask, source_images, source_caption, source_attention_mask = batchB, V, S = captions.shapesrc_V = V + 1 if self.task == 'continuation' else Voriginal_images = torch.flatten(original_images, 0, 1)captions = torch.flatten(captions, 0, 1)attention_mask = torch.flatten(attention_mask, 0, 1)source_images = torch.flatten(source_images, 0, 1)source_caption = torch.flatten(source_caption, 0, 1)source_attention_mask = torch.flatten(source_attention_mask, 0, 1)caption_embeddings = self.text_encoder(captions, attention_mask).last_hidden_state # B * V, S, Dsource_embeddings = self.mm_encoder(source_images, source_caption, source_attention_mask,mode='multimodal').reshape(B, src_V * S, -1)caption_embeddings += self.modal_type_embeddings(torch.tensor(0, device=self.device))source_embeddings += self.modal_type_embeddings(torch.tensor(1, device=self.device))source_embeddings += self.time_embeddings(torch.arange(src_V, device=self.device).repeat_interleave(S, dim=0))source_embeddings = source_embeddings.repeat_interleave(V, dim=0)encoder_hidden_states = torch.cat([caption_embeddings, source_embeddings], dim=1)attention_mask = torch.cat([attention_mask, source_attention_mask.reshape(B, src_V * S).repeat_interleave(V, dim=0)], dim=1)attention_mask = ~(attention_mask.bool()) # B * V, (src_V + 1) * S# B, V, V, Ssquare_mask = torch.triu(torch.ones((V, V), device=self.device)).bool()square_mask = square_mask.unsqueeze(0).unsqueeze(-1).expand(B, V, V, S)square_mask = square_mask.reshape(B * V, V * S)attention_mask[:, -V * S:] = torch.logical_or(square_mask, attention_mask[:, -V * S:])uncond_caption_embeddings = self.text_encoder(self.clip_text_null_token).last_hidden_stateuncond_source_embeddings = self.mm_encoder(self.blip_image_null_token, self.blip_text_null_token,attention_mask=None, mode='multimodal').repeat(1, src_V, 1)uncond_caption_embeddings += self.modal_type_embeddings(torch.tensor(0, device=self.device))uncond_source_embeddings += self.modal_type_embeddings(torch.tensor(1, device=self.device))uncond_source_embeddings += self.time_embeddings(torch.arange(src_V, device=self.device).repeat_interleave(S, dim=0))uncond_embeddings = torch.cat([uncond_caption_embeddings, uncond_source_embeddings], dim=1)uncond_embeddings = uncond_embeddings.expand(B * V, -1, -1)encoder_hidden_states = torch.cat([uncond_embeddings, encoder_hidden_states])uncond_attention_mask = torch.zeros((B * V, (src_V + 1) * S), device=self.device).bool()uncond_attention_mask[:, -V * S:] = square_maskattention_mask = torch.cat([uncond_attention_mask, attention_mask], dim=0)attention_mask = attention_mask.reshape(2, B, V, (src_V + 1) * S)# AutoRagressive Generationimages = list()for i in range(V):# 生成第 i 张image,这个i控制着当前diffusion可以看到的历史: captions[:, :, i]和frames[:, :, i]# encoder_hidden_states包含了{当前caption、历史captions、历史frames},作为corss-attn的KV融入Unetencoder_hidden_states = encoder_hidden_states.reshape(2, B, V, (src_V + 1) * S, -1)# Diffusion Sample(得带T个step生成一张image)new_image = self.diffusion(encoder_hidden_states[:, :, i].reshape(2 * B, (src_V + 1) * S, -1),attention_mask[:, :, i].reshape(2 * B, (src_V + 1) * S),512, 512, self.args.num_inference_steps, self.args.guidance_scale, 0.0)# 后面存入新生成的image,并更新encoder_hidden_states:加入新一帧的image和captionimages += new_imagenew_image = torch.stack([self.blip_image_processor(im) for im in new_image]).to(self.device)new_embedding = self.mm_encoder(new_image, # B,C,H,Wsource_caption.reshape(B, src_V, S)[:, i + src_V - V],source_attention_mask.reshape(B, src_V, S)[:, i + src_V - V],mode='multimodal') # B, S, Dnew_embedding = new_embedding.repeat_interleave(V, dim=0)new_embedding += self.modal_type_embeddings(torch.tensor(1, device=self.device))new_embedding += self.time_embeddings(torch.tensor(i + src_V - V, device=self.device))encoder_hidden_states = encoder_hidden_states[1].reshape(B * V, (src_V + 1) * S, -1)encoder_hidden_states[:, (i + 1 + src_V - V) * S:(i + 2 + src_V - V) * S] = new_embeddingencoder_hidden_states = torch.cat([uncond_embeddings, encoder_hidden_states])return original_images, images
一些注意事项:
- Lightning在需要的时候会调用backward和step。
- 如果使用半精度(precision=16),Lightning会自动处理。
- 如果使用多个优化器,training_step会附加一个参数optimizer_idx。
- 如果使用LBFGS,Lightning将自动处理关闭功能。
- 如果使用多个优化器,则在每个训练步骤中仅针对当前优化器的参数计算梯度。
- 如果需要控制这些优化程序执行或改写默认step的频率,请改写optimizer_step。
- 如果在每n步都调用调度器,或者只想监视自定义指标,则可以在lr_dict中指定。
{ "scheduler": lr_scheduler,"interval": "step", # or "epoch" "monitor": "val_f1","frequency": n,
}
blip mm encoder
BLIP源码中我们主要关注图像encoder(vit.py)、文本encoder+decoder(med.py)、整体预训练(blip_pretrain.py)这三部分代码。
-
vit.py作为图像的encoder,用来处理图像到embedding的生成。整体结构与vit代码类似。 -
med.py是blip文章的主要模型结构创新点。med代码部分的整体模型结构是在bert模型的基础上做的修改。首先,在BertSelfAttention代码中,加入is_cross_attention部分,用以判断是否进行图片和文本的cross attention,原本的bert中cross attention是和encoder的输出进行的,在med中要修改为图像的encoder结果,对key、value进行赋值。
因此我们叫这个多模态Encoder:Image-grounded Text Encoder (变种 BERT):在标准 BERT 的 text encoder 结构里,在 Bi Self-Att 和 Feed Forward 之间插入 Cross Attention模块,以引入 image 特征;
class BLIP_Base(nn.Module):def __init__(self,med_config='models/blip_override/med_config.json',image_size=224,vit='base',vit_grad_ckpt=False,vit_ckpt_layer=0,):"""Args:med_config (str): path for the mixture of encoder-decoder model's configuration fileimage_size (int): input image sizevit (str): model size of vision transformer"""super().__init__()self.visual_encoder, vision_width = create_vit(vit, image_size, vit_grad_ckpt, vit_ckpt_layer)self.tokenizer = init_tokenizer()med_config = BertConfig.from_json_file(med_config)med_config.encoder_width = vision_widthself.text_encoder = BertModel(config=med_config, add_pooling_layer=False)def forward(self, image, text, attention_mask, mode):assert mode in ['image', 'text', 'multimodal'], "mode parameter must be image, text, or multimodal"if mode == 'image':# return image featuresimage_embeds = self.visual_encoder(image)return image_embedselif mode == 'text':# return text featurestext_output = self.text_encoder(text, attention_mask=attention_mask, return_dict=True, mode='text')return text_output.last_hidden_stateelif mode == 'multimodal': # mm do it!!# return multimodel featuresimage_embeds = self.visual_encoder(image)image_atts = torch.ones(image_embeds.size()[:-1], dtype=torch.long).to(image.device)text[:, 0] = self.tokenizer.enc_token_idoutput = self.text_encoder(text,attention_mask=attention_mask,encoder_hidden_states=image_embeds,encoder_attention_mask=image_atts,return_dict=True,)return output.last_hidden_state
相关文章:
AR-LDM原理及代码分析
AR-LDM原理AR-LDM代码分析pytorch_lightning(pl)的hook流程main.py 具体分析TrainSampleLightningDatasetARLDM blip mm encoder AR-LDM原理 左边是模仿了自回归地从1, 2, ..., j-1来构造 j 时刻的 frame 的过程。 在普通Stable Diffusion的基础上,使用了1, 2, .…...
MySQL常见死锁的发生场景以及如何解决
死锁的产生是因为满足了四个条件: 互斥占有且等待不可强占用循环等待 这个网站收集了很多死锁场景 接下来介绍几种常见的死锁发生场景。其中,id 为主键,no(学号)为二级唯一索引,name(姓名&am…...
Leetcode 47 全排列 II
题意理解: 首先理解全排列是什么?全排列:使用集合中所有元素按照不同元素进行排列,将所有的排列结果的集合称为全排列。 这里的全排列难度升级了,问题在于集合中的元素是可以重复的。 问题:相同的元素会导致…...
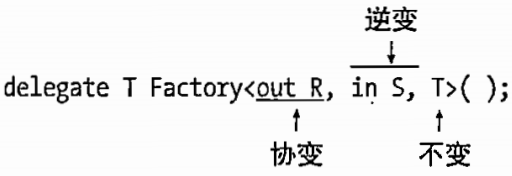
C# 图解教程 第5版 —— 第18章 泛型
文章目录 18.1 什么是泛型18.2 C# 中的泛型18.3 泛型类18.3.1 声明泛型类18.3.2 创建构造类型18.3.3 创建变量和实例18.3.4 使用泛型的示例18.3.5 比较泛型和非泛型栈 18.4 类型参数的约束18.4.1 Where 子句18.4.2 约束类型和次序 18.5 泛型方法18.5.1 声明泛型方法18.5.2 调用…...

保障事务隔离级别的关键措施
目录 引言 1. 锁机制的应用 2. 多版本并发控制(MVCC)的实现 3. 事务日志的记录与恢复 4. 数据库引擎的实现策略 结论 引言 事务隔离级别是数据库管理系统(DBMS)中的一个关键概念,用于控制并发事务之间的可见性。…...

Docker导入导出镜像、导入导出容器的命令详解以及使用的场景
一、Docker 提供用于管理镜像和容器命令 1.1 docker save 与 docker load 这是一对操作,用于处理 Docker 镜像。这个操作会将所有的镜像层以及元数据打包到一个 tar 文件中。然后,你可以使用 docker load 命令将这个 tar 文件导入到任何 Docker 环境中…...
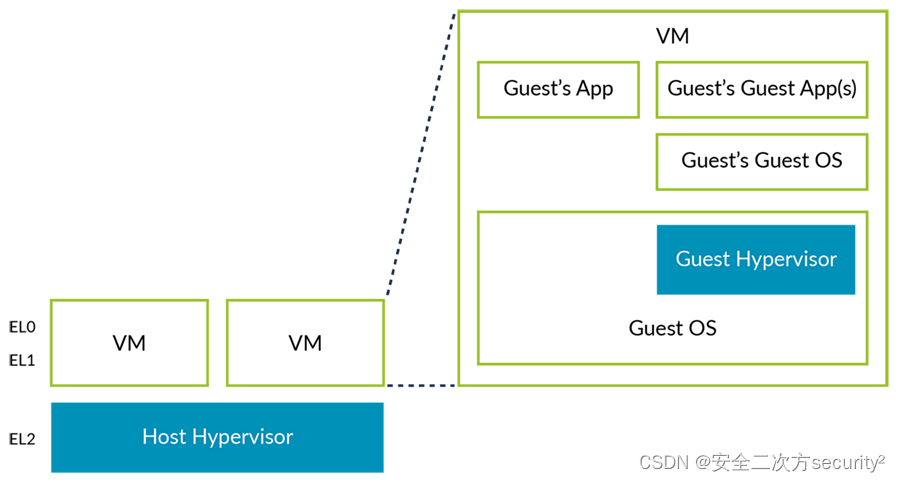
虚拟化嵌套
在理论上,可以在虚拟机(VM)内运行一个hypervisor,这个概念被称为嵌套虚拟化: 我们将第一个hypervisor称为Host Hypervisor,将VM内的hypervisor称为Guest Hypervisor。 在Armv8.3-A发布之前,可以通过在EL0中运行Guest Hypervisor来在VM中运行Guest Hypervisor。然而,这…...

【XILINX】记录ISE/Vivado使用过程中遇到的一些warning及解决方案
前言 XILINX/AMD是大家常用的FPGA,但是在使用其开发工具ISE/Vivado时免不了会遇到很多warning,(大家是不是发现程序越大warning越多?),并且还有很多warning根据消除不了,看着特心烦? 我这里汇总一些我遇到的…...
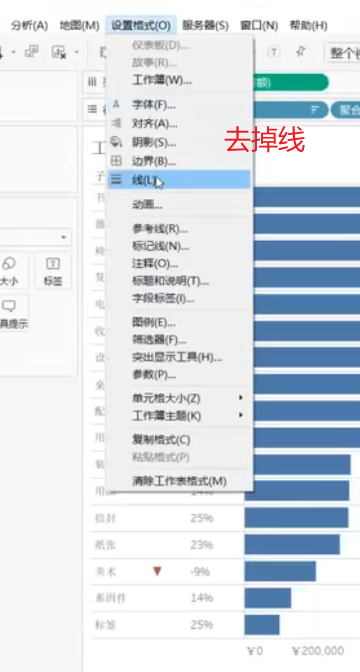
Tableau进阶--Tableau数据故事慧(20)解构Tableau的绘图逻辑
官网介绍 官网连接如下: https://www.tableau.com/zh-cn tableau的产品包括如下: 参考:https://zhuanlan.zhihu.com/p/341882097 Tableau是功能强大、灵活且安全些很高的端到端的数据分析平台,它提供了从数据准备、连接、分析、协作到查阅…...
)
45.0/HTML 简介(详细版)
目录 45.1 互联网简介 45.2 网页技术与分类 45.3 HTML 简介 45.3.1 什么是 HTML?(面试题) 45.3.2 HTML 文件结构 45.3.3 HTML 语法 45.3.4 实例演练步骤(面试题) 45.4 head 中的常用标签 45.4.1 title 标记 45.4.2 meta 标记 45.4.3 45.4.4 45.4.4(面试题)总结: 45…...

Python 如何进行游戏开发?
游戏开发是一个广泛的领域,Python 作为一门灵活的编程语言,可以用于不同类型的游戏开发。以下是一些建议和步骤,帮助你开始使用 Python 进行游戏开发: 1、选择游戏开发库/框架: Pygame: Pygame 是一个用于…...

到底什么是DevOps
DevOps不是一组工具,也不是一个特定的岗位。在我看来DevOps更像是一种软件开发文化,一种实现快速交付能力的手段。 DevOps 强调的是高效组织团队之间如何通过自动化的工具协作和沟通来完成软件的生命周期管理,从而更快、更频繁地交付更稳定的…...

Keil生成bin文件
Keil生成bin文件_keil5生成bin文件-CSDN博客...
【STM32】USART串口协议
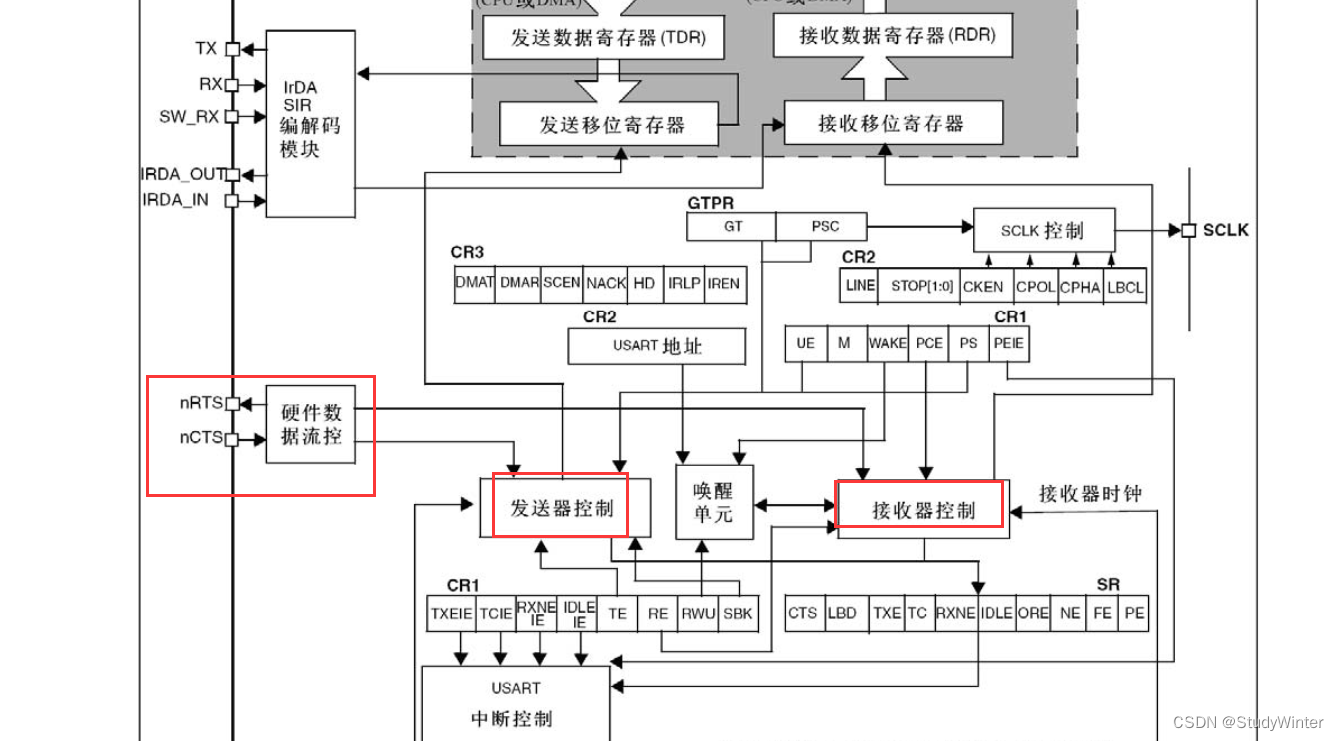
1 通信接口 通信的目的:将一个设备的数据传送到另一个设备,扩展硬件系统 通信协议:制定通信的规则,通信双方按照协议规则进行数据收发 USRT:TX是数据发送引脚,RX是数据接受引脚; I2C…...

淋雨试验箱
产品概述 KDZD-IPX34淋雨试验箱是对户外电子电工产品的防水性能测试的一种装置。该设备通过不同尺寸的喷嘴喷水,产品外壳表面淋水冲洗来检测防水性能。在测试物品时,将样品放在转台上,试验启动时,水流通过压力计和流量计控制水…...
02-MQ入门之RabbitMQ简单概念说明
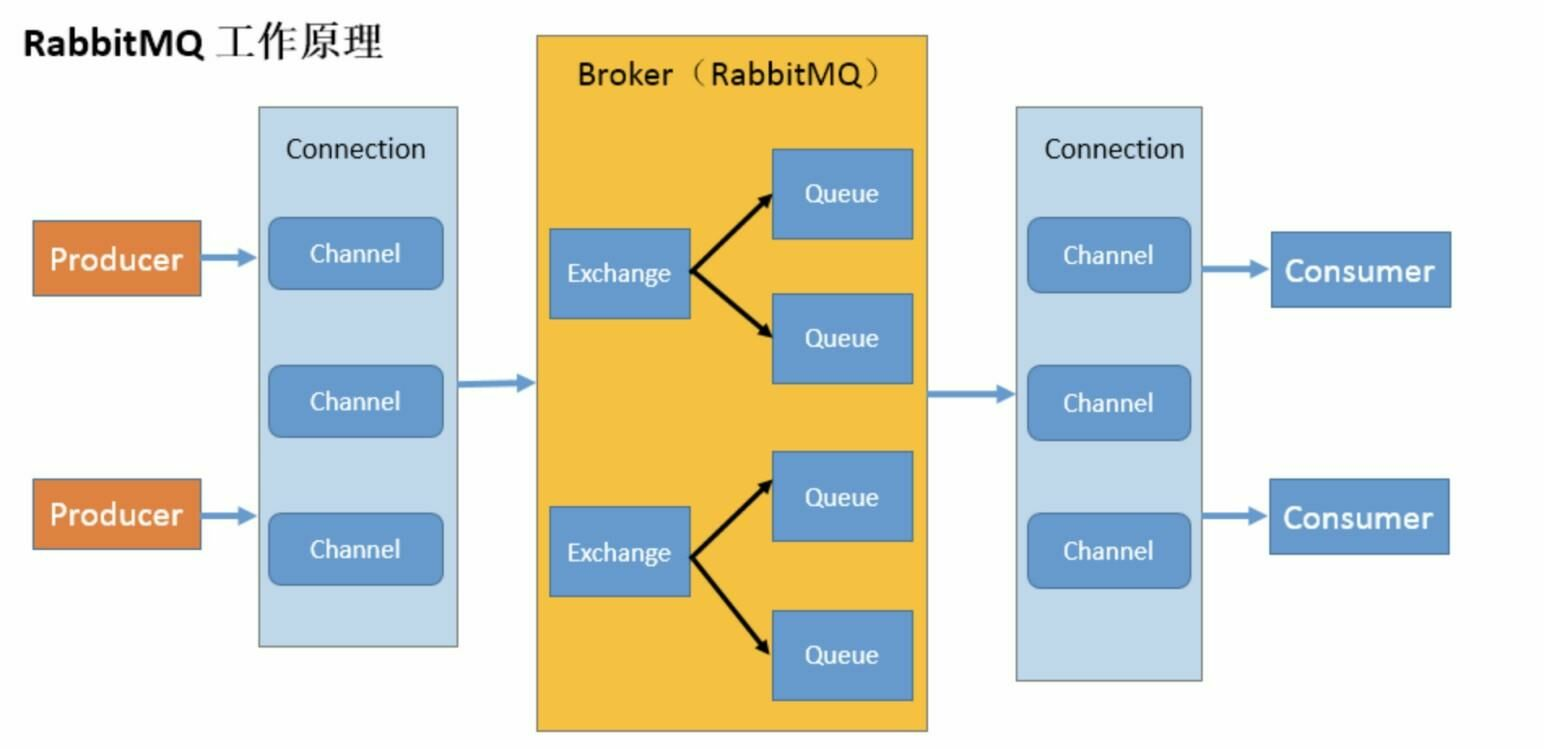
二:RabbitMQ 介绍 1.RabbitMQ的概念 RabbitMQ 是一个消息中间件:它接受并转发消息。你可以把它当做一个快递站点,当你要发送一个包裹时,你把你的包裹放到快递站,快递员最终会把你的快递送到收件人那里,按…...
敏感信息泄漏怎么破?来试试极狐GitLab 的密钥检测吧
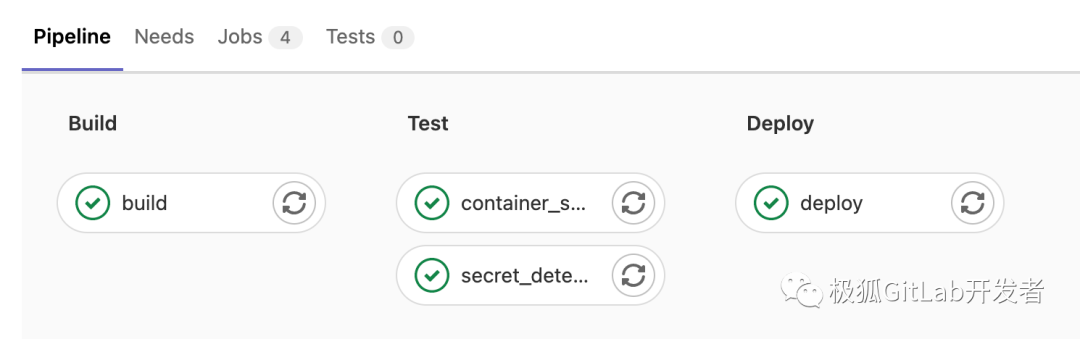
前言 在应用程序开发过程中,一个很常见的问题就是:开发人员为了本地 debug 方便,会 hardcode 一些信息,比如连接数据库的用户名、密码、连接第三方 app 的 token、certificate 等,如果在提交代码的时候没有及时删除 ha…...

go学习之网络编程
文章目录 网络编程1、网络编程的基本介绍2.网络编程的基础知识1)协议(tcp/ip)2)OSI与TCP/ip参考模型3)ip地址4)端口(port)介绍5)tcp socket编程的客户端和服务器端 3.socket编程快速入门4.经典项目-海量用户即时通讯系…...

将数组中的数逆序存放
本题要求编写程序,将给定的n个整数存入数组中,将数组中的这n个数逆序存放,再按顺序输出数组中的元素。 输入格式: 输入在第一行中给出一个正整数n(1≤n≤10)。第二行输入n个整数,用空格分开。 输出格式:…...

Unity Web 浏览器-3D WebView中有关于CanvasWebViewPrefab
一、CanvasWebViewPrefab默认设置 这个是在2_CanvasWebViewDemo示例场景文件中可以可以查看得到,可以看出CanvasWebViewPrefab的默认配置如下。 二、Web 浏览器网页和Unity内置UI的渲染顺序 1、如果你勾选了以下这个Native 2D Mode选项的话,那么Unit…...

龙虎榜——20250610
上证指数放量收阴线,个股多数下跌,盘中受消息影响大幅波动。 深证指数放量收阴线形成顶分型,指数短线有调整的需求,大概需要一两天。 2025年6月10日龙虎榜行业方向分析 1. 金融科技 代表标的:御银股份、雄帝科技 驱动…...

conda相比python好处
Conda 作为 Python 的环境和包管理工具,相比原生 Python 生态(如 pip 虚拟环境)有许多独特优势,尤其在多项目管理、依赖处理和跨平台兼容性等方面表现更优。以下是 Conda 的核心好处: 一、一站式环境管理:…...
(二)TensorRT-LLM | 模型导出(v0.20.0rc3)
0. 概述 上一节 对安装和使用有个基本介绍。根据这个 issue 的描述,后续 TensorRT-LLM 团队可能更专注于更新和维护 pytorch backend。但 tensorrt backend 作为先前一直开发的工作,其中包含了大量可以学习的地方。本文主要看看它导出模型的部分&#x…...

Linux简单的操作
ls ls 查看当前目录 ll 查看详细内容 ls -a 查看所有的内容 ls --help 查看方法文档 pwd pwd 查看当前路径 cd cd 转路径 cd .. 转上一级路径 cd 名 转换路径 …...
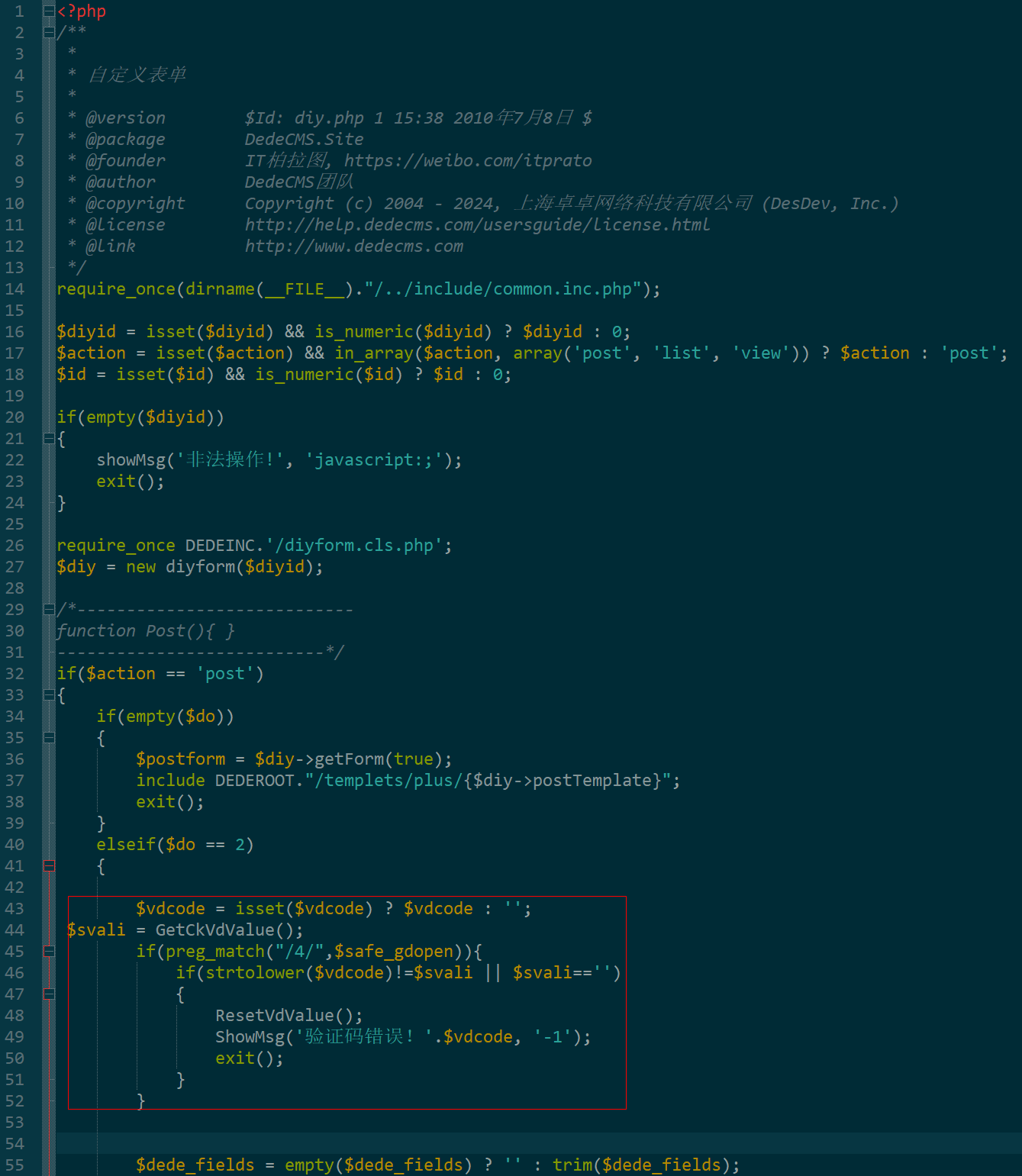
dedecms 织梦自定义表单留言增加ajax验证码功能
增加ajax功能模块,用户不点击提交按钮,只要输入框失去焦点,就会提前提示验证码是否正确。 一,模板上增加验证码 <input name"vdcode"id"vdcode" placeholder"请输入验证码" type"text&quo…...
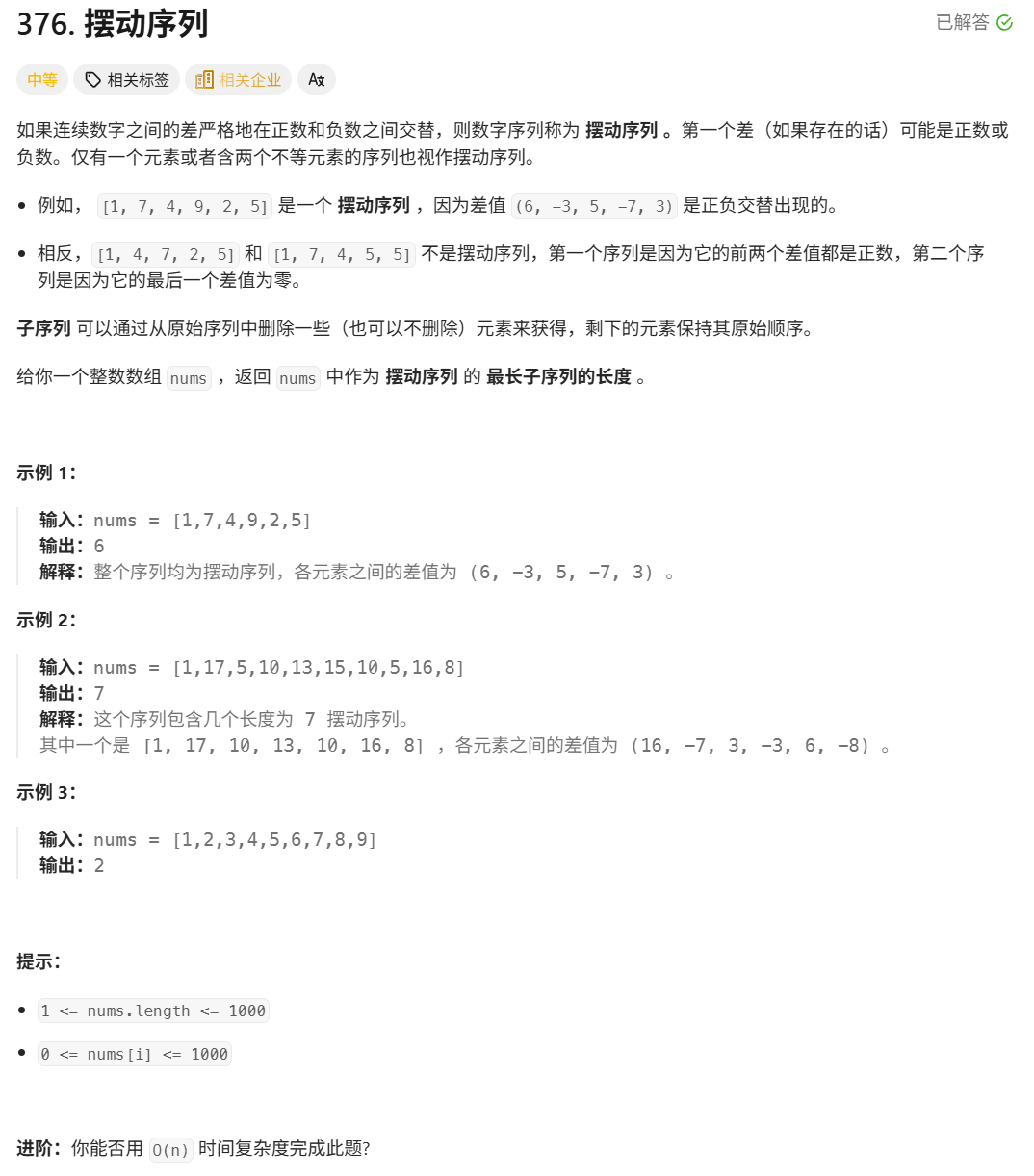
376. Wiggle Subsequence
376. Wiggle Subsequence 代码 class Solution { public:int wiggleMaxLength(vector<int>& nums) {int n nums.size();int res 1;int prediff 0;int curdiff 0;for(int i 0;i < n-1;i){curdiff nums[i1] - nums[i];if( (prediff > 0 && curdif…...

【Go】3、Go语言进阶与依赖管理
前言 本系列文章参考自稀土掘金上的 【字节内部课】公开课,做自我学习总结整理。 Go语言并发编程 Go语言原生支持并发编程,它的核心机制是 Goroutine 协程、Channel 通道,并基于CSP(Communicating Sequential Processes࿰…...
人机融合智能 | “人智交互”跨学科新领域
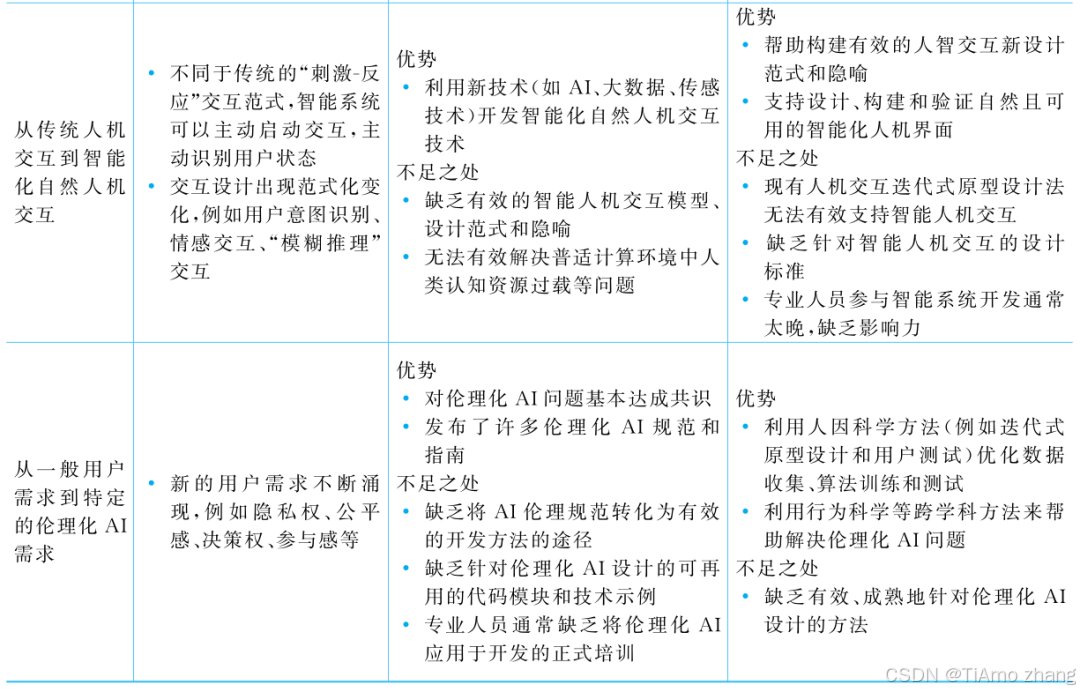
本文系统地提出基于“以人为中心AI(HCAI)”理念的人-人工智能交互(人智交互)这一跨学科新领域及框架,定义人智交互领域的理念、基本理论和关键问题、方法、开发流程和参与团队等,阐述提出人智交互新领域的意义。然后,提出人智交互研究的三种新范式取向以及它们的意义。最后,总结…...
集成 Mybatis-Plus 和 Mybatis-Plus-Join)
纯 Java 项目(非 SpringBoot)集成 Mybatis-Plus 和 Mybatis-Plus-Join
纯 Java 项目(非 SpringBoot)集成 Mybatis-Plus 和 Mybatis-Plus-Join 1、依赖1.1、依赖版本1.2、pom.xml 2、代码2.1、SqlSession 构造器2.2、MybatisPlus代码生成器2.3、获取 config.yml 配置2.3.1、config.yml2.3.2、项目配置类 2.4、ftl 模板2.4.1、…...
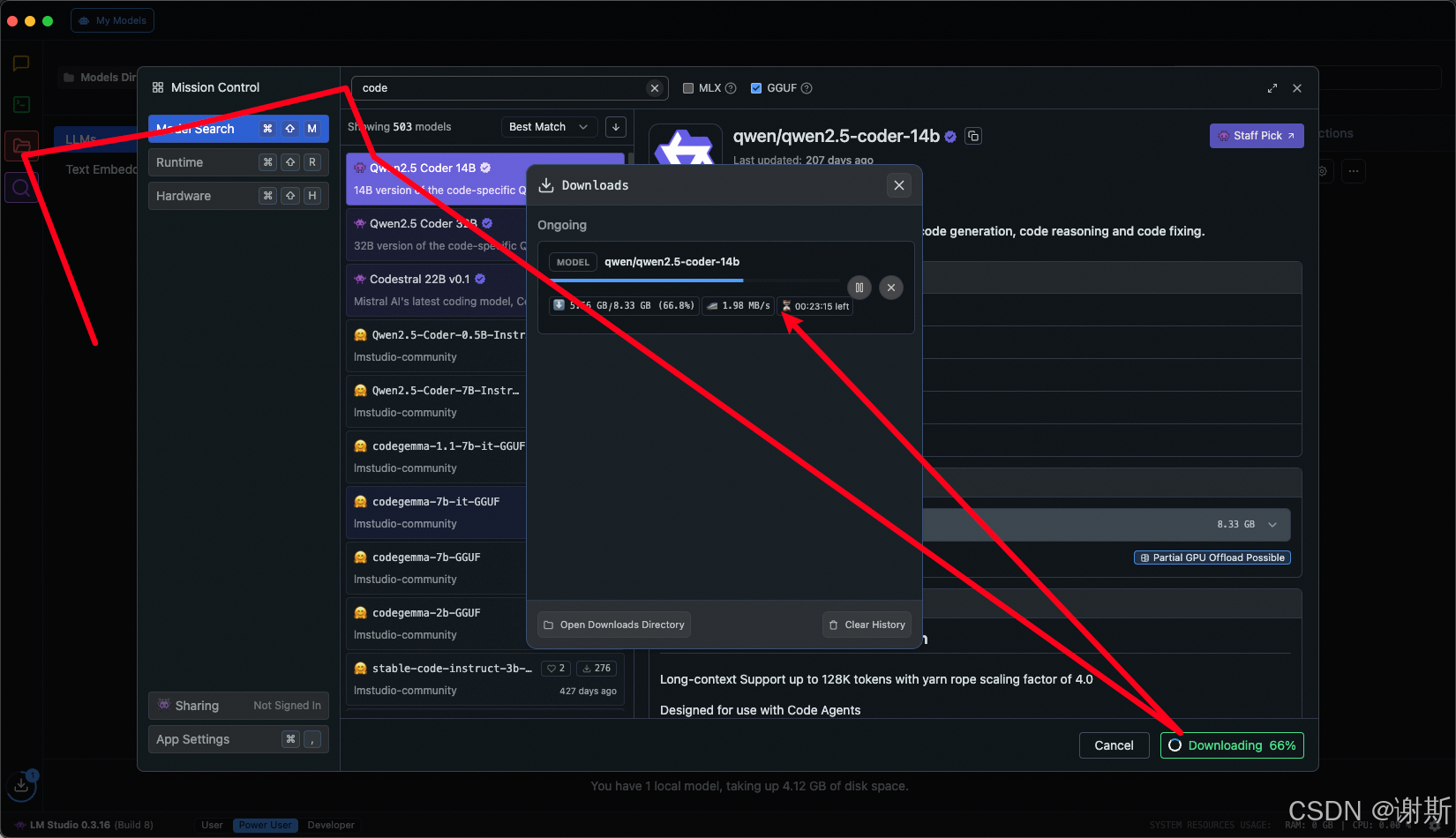
[大语言模型]在个人电脑上部署ollama 并进行管理,最后配置AI程序开发助手.
ollama官网: 下载 https://ollama.com/ 安装 查看可以使用的模型 https://ollama.com/search 例如 https://ollama.com/library/deepseek-r1/tags # deepseek-r1:7bollama pull deepseek-r1:7b改token数量为409622 16384 ollama命令说明 ollama serve #:…...