OpenCV极坐标变换函数warpPolar的使用
学更好的别人,
做更好的自己。
——《微卡智享》

本文长度为1702字,预计阅读4分钟
前言
前阵子在做方案时,得了几张骨钉的图片,骨科耗材批号效期管理一直是比较麻烦的,贴RFID标签成本太高,所以一般考虑还是OCR的识别比较好,因为本身骨钉的字符是按圆印上去的,直接截取图片进行OCR没法识别,需要经过图像处理后再识别,所以这篇就是学习一下OpenCV的极坐标变换函数。

实现效果

源图像
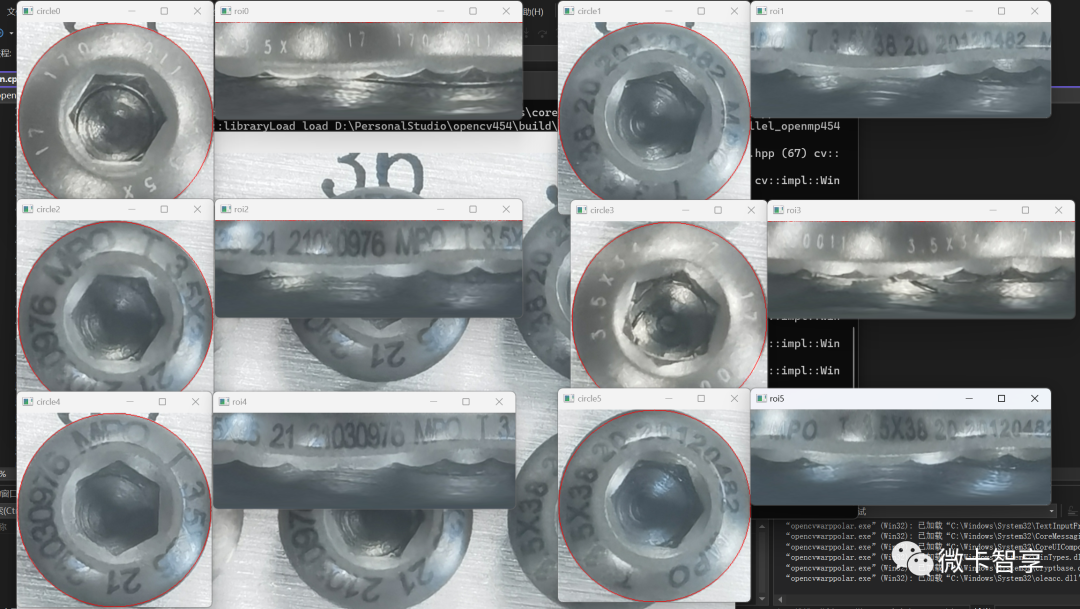 查找出骨钉后用极坐标变换生成的图像
查找出骨钉后用极坐标变换生成的图像
图像本来就是手机拍的,反光也比较厉害,所以本篇主要就是介绍极坐标变换,最后的OCR识别就不在这个范围内了。
极坐标变换函数
void cv::warpPolar(InputArray src, —原图像,单通道灰度图和三通道彩色图都可OutputArray dst, —输出图像,与原图像具有相同的数据类型和通道数Size dsize, —目标图像大小,如图不填这个值或dsize两个值中的某个值Point2f center, —极坐标变换时原点坐标double maxRadius, —极坐标系的极半径最大值int flags ) —插值方法与极坐标映射方法标志。方法之间通过“+”或者“|”号进行连接重点说明:
dsize:目标图像大小,Size(0,0)主要就是填写里面的width和height
-
当width和height两个值均<=0(默认),则目标图像将具有(几乎)相同的源边界圆面积
-
当width>0并且height <= 0,目标图像区域将与边界圆区域按比例缩放
-
当width和height都 > 0, 目标图像将具有给定的大小,因此边界圆的面积将缩放为dsize
flags:插值方法与极坐标映射方法标志
插值方法:图像缩放之后,肯定像素要进行重新计算的,就靠这个参数来指定重新计算像素的方式,一般分为:
-
INTER_NEAREST - 最邻近插值
-
INTER_LINEAR - 双线性插值,如果最后一个参数你不指定,默认使用这种方法
-
INTER_AREA -区域插值
-
INTER_CUBIC - 4x4像素邻域内的双立方插值
-
INTER_LANCZOS4 - 8x8像素邻域内的Lanczos插值
这个我们一般都默认为INTER_LINEAR - 双线性插值即可。
极坐标映射方法里面就三个,主要是极坐标变换、半对数极坐标变换和逆变换。
-
WARP_POLAR_LINEAR - 极坐标变换
-
WARP_POLAR_LOG - 半对数极坐标变换
-
WARP_INVERSE_MAP - 逆变换
核心来说其实就是两个极坐标变换和半对数极坐标变换,它们两个都是由圆变换为矩形,而逆变换就是针对两种变换由矩形再转为圆。逆变换在原来的flags后面用“+”连接即可。
warpPolar的起始位置和图像旋转角度
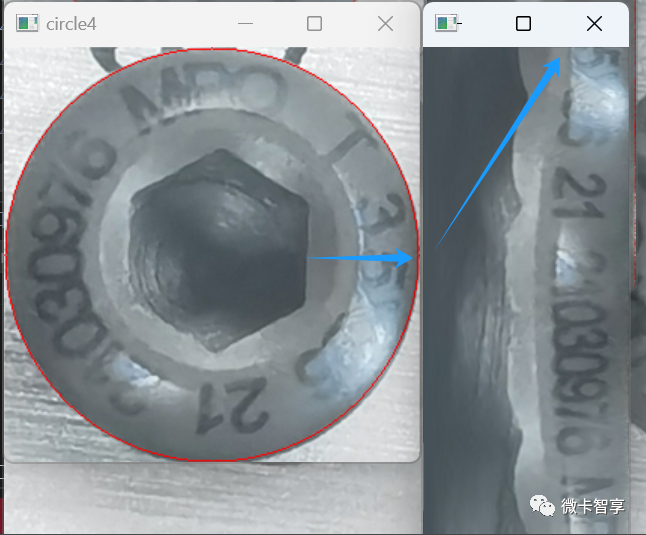
极坐标变换的起始位置默认就是3点钟的方向,上图中用蓝色箭头指的就是开始的位置,从3点钟方向顺时针来进行变换。
生成的矩形默认是向下垂直排列的,按我们自己的习惯肯定还需要将图像进行旋转,所以转换完后需要用rotate做一个图像的旋转。
代码如下:
//极坐标变换
//参数 flags=INTER_LINEAR 双线性插值
Mat warpPolarMat(Mat src, int flags = INTER_LINEAR + WARP_POLAR_LINEAR) {// 圆心坐标Point2f center = Point2f(src.cols / 2, src.rows / 2);// 圆的半径double maxRadius = min(center.y, center.x) - 1;// 圆的周长int circumference = maxRadius * 2 * 3.14;//输出图像Mat dst;// 极坐标变换, Size()表示OpenCV根据输入自行决定输出图像尺寸warpPolar(src, dst, Size(0, 0), center, maxRadius, flags);// 改变结果方向rotate(dst, dst, ROTATE_90_COUNTERCLOCKWISE);return dst;
}
实现思路及完整代码
| # | 实现步骤 |
|---|---|
| 1 | 图像简单处理(灰度图、中值滤波) |
| 2 | 霍夫圆检测获取到图像中的骨钉 |
| 3 | 将获取到的圆每个分别截取出来进行极坐标变换显示出来 |
完整代码
#include <iostream>
#include <opencv2/opencv.hpp>using namespace std;
using namespace cv;//显示窗口设置
//参数 img 显示的图像源,
// winname 显示的窗口名称,
// pointx 显示的坐标x
// pointy 显示的坐标y
void setshowwindow(Mat img, string winname, int pointx, int pointy)
{//设置显示窗口namedWindow(winname, WindowFlags::WINDOW_NORMAL);//设置图像显示大小resizeWindow(winname, img.size());//设置图像显示位置moveWindow(winname, pointx, pointy);
}//极坐标变换
//参数 flags=INTER_LINEAR 双线性插值
Mat warpPolarMat(Mat src, int flags = INTER_LINEAR + WARP_POLAR_LINEAR) {// 圆心坐标Point2f center = Point2f(src.cols / 2, src.rows / 2);// 圆的半径double maxRadius = min(center.y, center.x) - 1;// 圆的周长int circumference = maxRadius * 2 * 3.14;//输出图像Mat dst;// 极坐标变换, Size()表示OpenCV根据输入自行决定输出图像尺寸warpPolar(src, dst, Size(0, 0), center, maxRadius, flags);// 改变结果方向rotate(dst, dst, ROTATE_90_COUNTERCLOCKWISE);return dst;
}int main(int argc, char** argv) {//测试图片文件 string testfile = "E:/DCIM/imagetest/06.png";//读取图片Mat src = imread(testfile);//修改图片大小setshowwindow(src, "src", 50, 200);imshow("src", src);//灰度图Mat gray;cvtColor(src, gray, COLOR_BGR2GRAY);//中值滤波medianBlur(gray, gray, 9);//霍夫圆检测vector<Vec3f> circles;HoughCircles(gray, circles, HOUGH_GRADIENT, 1, 50, 100, 100);//绘制检测到的圆型for (size_t i = 0; i < circles.size(); ++i) {Vec3f item = circles[i];//绘制检测到的圆circle(src, Point(item[0], item[1]), item[2], Scalar(0, 0, 255));//根据圆点和半径生成矩形Rect rect = Rect(Point(item[0] - item[2], item[1] - item[2]), Point(item[0] + item[2], item[1] + item[2]));//截图到当前圆的图像Mat rectsrc = src(rect);//极坐标变换Mat rectdst, showmat;rectdst = warpPolarMat(rectsrc);//设置当前圆显示位置String title = "circle" + to_string(i);String title2 = "roi" + to_string(i);if ((i % 2) == 0) {setshowwindow(rectsrc, title, 50, rectsrc.rows * (i / 2) + 2);setshowwindow(rectdst, title2, 50 + rectsrc.cols + 2, rectsrc.rows * (i / 2) + 2);}else {setshowwindow(rectsrc, title, (rectsrc.rows + rectdst.rows) * 2 , rectsrc.rows * (i / 2) + (i % 2) + 2);setshowwindow(rectdst, title2, (rectsrc.rows + rectdst.rows) *2 + rectsrc.rows , rectsrc.rows * (i / 2) + (i % 2) + 2);}imshow(title, rectsrc);imshow(title2, rectdst);}waitKey();return 0;
}完

往期精彩回顾
Android Aidl跨进程通讯(四)--接口回调,服务端向客户端发送数据
Android Aidl跨进程通讯(三)--进阶使用

Android Aidl跨进程通讯(二)--异常捕获处理
相关文章:
OpenCV极坐标变换函数warpPolar的使用
学更好的别人, 做更好的自己。 ——《微卡智享》 本文长度为1702字,预计阅读4分钟 前言 前阵子在做方案时,得了几张骨钉的图片,骨科耗材批号效期管理一直是比较麻烦的,贴RFID标签成本太高,所以一般考虑还是…...
类与接口常见面试题
抽象类和接口的对比 抽象类是用来捕捉子类的通用特性的。接口是抽象方法的集合。 从设计层面来说,抽象类是对类的抽象,是一种模板设计,接口是行为的抽象,是一种行为的规范。 相同点 接口和抽象类都不能实例化都位于继承的顶端…...
Windows mysql5.7 执行查询/开启/测试binlog---简易记录
前言:基于虚拟机mysql版本为5.7,增量备份测试那就要用到binlog… 简述:二进制日志(binnary log)以事件形式记录了对MySQL数据库执行更改的所有操作。 binlog是记录所有数据库表结构变更(例如CREATE、ALTER…...

文档安全加固:零容忍盗窃,如何有效预防重要信息外泄
文档安全保护不仅需要从源头着手,杜绝文档在使用和传播过程中产生的泄密风险,同时还需要对文档内容本身进行有效的保护。为了防范通过拷贝、截屏、拍照等手段盗窃重要文档内容信息的风险,迅软DSE加密软件提供了文档加密保护功能,能…...

前端如何设置模板参数
1.背景: 最近接到一个需求,在一个类似chatGpt的聊天工具中,要在对话框中设置模板,后端提供了很多模板参数,然后要求将后端返回的特殊字符转成按钮,编辑完成后在相应的位置拼接成字符串。 2.效果:…...

06 使用v-model实现双向数据绑定
概述 Vue achieves two-way data binding by creating a dedicated directive that watches a data property within your Vue component. The v-model directive triggers data updates when the target data property is modified on the UI. Vue 通过创建一个专用指令来观…...
【C++11特性篇】C++11中新增的initializer_list——初始化的小利器(2)
前言 大家好吖,欢迎来到 YY 滴C11系列 ,热烈欢迎! 本章主要内容面向接触过C的老铁 主要内容含: 欢迎订阅 YY滴C专栏!更多干货持续更新!以下是传送门! 目录 一.探究std::initializer_list是什么…...
计算机网络传输层(期末、考研)
计算机网络总复习链接🔗 目录 传输层的功能端口UDP协议UDP数据报UDP的首部格式UDP校验 TCP协议(必考)TCP报文段TCP连接的建立TCP连接的释放TCP的可靠传输TCP的流量控制零窗口探测报文段 TCP的拥塞控制慢开始和拥塞控制快重传和快恢复 TCP和U…...
【STM32入门】4.1中断基本知识
1.中断概览 在开展红外传感器遮挡计次的实验之前,有必要系统性的了解“中断”的基本知识. 中断是指:在主程序运行过程中,出现了特定的中断触发条件(中断源),使得CPU暂停当前正在运行的程序,转…...
HCIA-H12-811题目解析(3)
1、【单选题】 以下关于路由器的描述,说法错误的是? 2、【单选题】某网络工程师在输入命令行时提示如下信息:Error:Unrecognized command foun at position.对于该提示信息说法正确的是? 3、【单选题】如下图所示的网络…...

【异步绘制】UIView刷新原理 与 异步绘制
快捷目录 壹、 iOS界面刷新机制贰、浅谈UIView的刷新与绘制概述一.UIView 与 CALayer1. UIView 与 CALayer的关系2. CALayer的一些常用属性contents属性contentGravity属性contentsScale属性maskToBounds属性contentsRect属性 二.View的布局与显示1.图像显示原理2.布局layoutSu…...

[ERROR] ocp-server-ce-py_script_start_check-4.2.1 RuntimeError: ‘tenant_name‘
Oceanbase 安装成功后关闭OCP,在重新启动时报错 使用OBD 启动OCP报如下错误 [adminobd ~]$ obd cluster start ocp Get local repositories ok Search plugins ok Open ssh connection ok Load cluster param plugin ok Check before start ocp-server x [ERROR] …...
模拟实验中经常遇到的问题和常用技巧
简介 最近在进行新文章的数值模拟阶段。上一次已经跟读者们分享了模拟实验的大致流程,见:数值模拟流程记录和分享 。 本文是在前提下,汇总了小编在模拟实验中经常遇到的问题和常用技巧。 文章目录 简介1. 隐藏输出结果自动创建文件夹保存多…...
 ——模版语法1)
微信小程序(二) ——模版语法1
文章目录 wxml模板语法拼接字符数据绑定 wxml模板语法 拼接字符 <image src"{{test1src}}" mode""/>数据绑定 在data中定义数据,吧数据定义到data对象中在wxml中使用数据不论是绑定内容还是属性都是用 {{}} 语法 动态绑定内容 *声明…...
牛客小白月赛83 解题报告
题目链接: https://ac.nowcoder.com/acm/contest/72041#question A题 解题思路 签到 代码 #include <bits/stdc.h> using namespace std;int main() {int a, b, c, d, e;cin >> a >> b >> c >> d >> e;int A, B, C, D…...

蓝桥杯专题-真题版含答案-【三角螺旋阵】【干支记年法】【异或加密法】【金字塔】
Unity3D特效百例案例项目实战源码Android-Unity实战问题汇总游戏脚本-辅助自动化Android控件全解手册再战Android系列Scratch编程案例软考全系列Unity3D学习专栏蓝桥系列ChatGPT和AIGC 👉关于作者 专注于Android/Unity和各种游戏开发技巧,以及各种资源分…...
)
鸿蒙篇——初次使用鸿蒙原生编译器DevEcoStudio创建一个鸿蒙原生应用遇到的坑--汇总(持续更新)
前言:欢迎各位鸿蒙初学者、开发者来本帖交流讨论,包含各位遇到的问题、鸿蒙的bug、解决方法等等,我会收集有效的内容更新到本文章中。 背景:2023年12月13日,使用DevEcoStudio 4.0.0.600版本,项目的compileS…...

细胞培养之一二三:哺乳动物细胞培养污染问题和解决方案
一、哺乳动物细胞污染是什么[1]? 污染通常是指在细胞培养基中存在不需要的微生物、不需要的哺乳动物细胞和各种生化或化学物质,从而影响所需哺乳动物细胞的生理和生长。由于微生物在包括人体特定部位在内的环境中无处不在,而且它们的繁殖速度…...

《Linux C编程实战》笔记:文件属性操作函数
获取文件属性 stat函数 在shell下直接使用ls就可以获得文件属性,但是在程序里应该怎么获得呢? #include<sys/types.h> #include <sys/stat.h> #include <unistd.h> int stat(const char *file_name,struct stat *buf); int fstat(i…...

linux中的网络知识
网络 认识基本网络网络划分计算机网络分为LAN、MAN、WAN公网ip和私网ip 传输介质单位换算客户端和服务端 OSI模型osi七层模型TCP/IP:传输控制协议簇HTTP协议简介UDP协议介绍物理地址:mac地址,全球唯一,mac由6段16进制数组成,每段有…...

FastAPI 教程:从入门到实践
FastAPI 是一个现代、快速(高性能)的 Web 框架,用于构建 API,支持 Python 3.6。它基于标准 Python 类型提示,易于学习且功能强大。以下是一个完整的 FastAPI 入门教程,涵盖从环境搭建到创建并运行一个简单的…...

将对透视变换后的图像使用Otsu进行阈值化,来分离黑色和白色像素。这句话中的Otsu是什么意思?
Otsu 是一种自动阈值化方法,用于将图像分割为前景和背景。它通过最小化图像的类内方差或等价地最大化类间方差来选择最佳阈值。这种方法特别适用于图像的二值化处理,能够自动确定一个阈值,将图像中的像素分为黑色和白色两类。 Otsu 方法的原…...

【生成模型】视频生成论文调研
工作清单 上游应用方向:控制、速度、时长、高动态、多主体驱动 类型工作基础模型WAN / WAN-VACE / HunyuanVideo控制条件轨迹控制ATI~镜头控制ReCamMaster~多主体驱动Phantom~音频驱动Let Them Talk: Audio-Driven Multi-Person Conversational Video Generation速…...

第7篇:中间件全链路监控与 SQL 性能分析实践
7.1 章节导读 在构建数据库中间件的过程中,可观测性 和 性能分析 是保障系统稳定性与可维护性的核心能力。 特别是在复杂分布式场景中,必须做到: 🔍 追踪每一条 SQL 的生命周期(从入口到数据库执行)&#…...
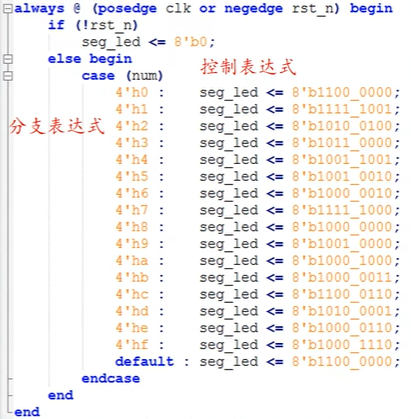
ZYNQ学习记录FPGA(二)Verilog语言
一、Verilog简介 1.1 HDL(Hardware Description language) 在解释HDL之前,先来了解一下数字系统设计的流程:逻辑设计 -> 电路实现 -> 系统验证。 逻辑设计又称前端,在这个过程中就需要用到HDL,正文…...
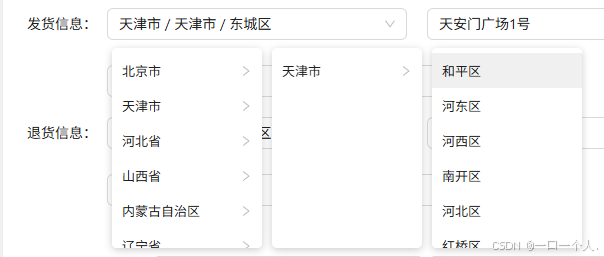
vue3 手动封装城市三级联动
要做的功能 示意图是这样的,因为后端给的数据结构 不足以使用ant-design组件 的联动查询组件 所以只能自己分装 组件 当然 这个数据后端给的不一样的情况下 可能组件内对应的 逻辑方式就不一样 毕竟是 三个 数组 省份 城市 区域 我直接粘贴组件代码了 <temp…...
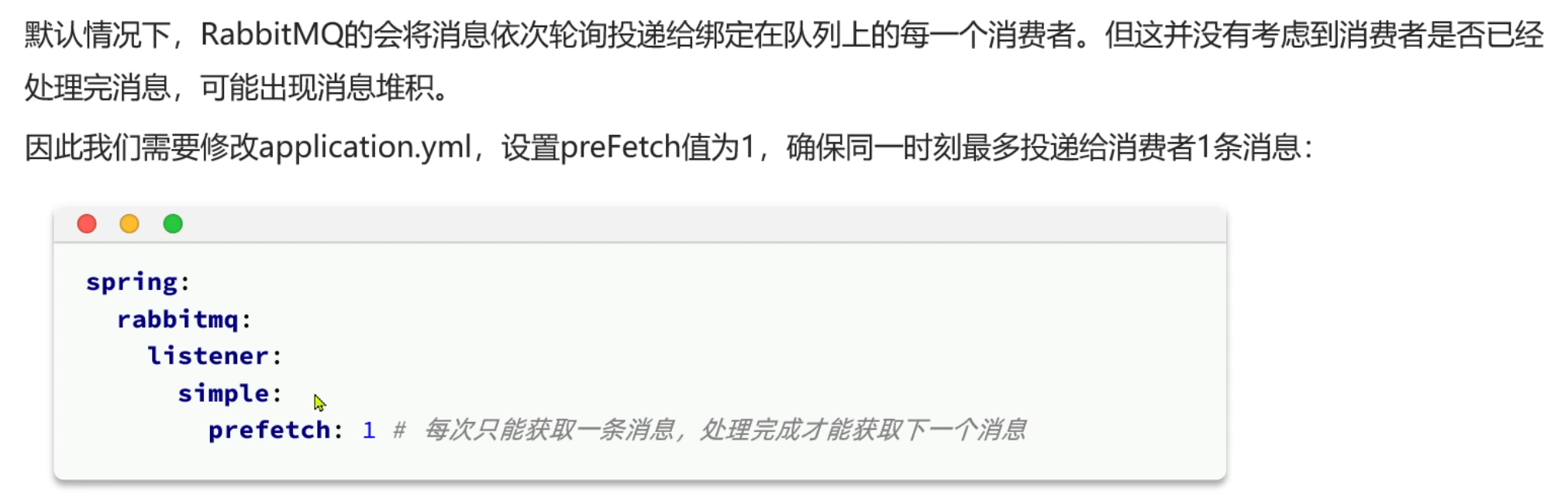
RabbitMQ work模型
Work 模型是 RabbitMQ 最基础的消息处理模式,核心思想是 多个消费者竞争消费同一个队列中的消息,适用于任务分发和负载均衡场景。同一个消息只会被一个消费者处理。 当一个消息队列绑定了多个消费者,每个消息消费的个数都是平摊的&a…...
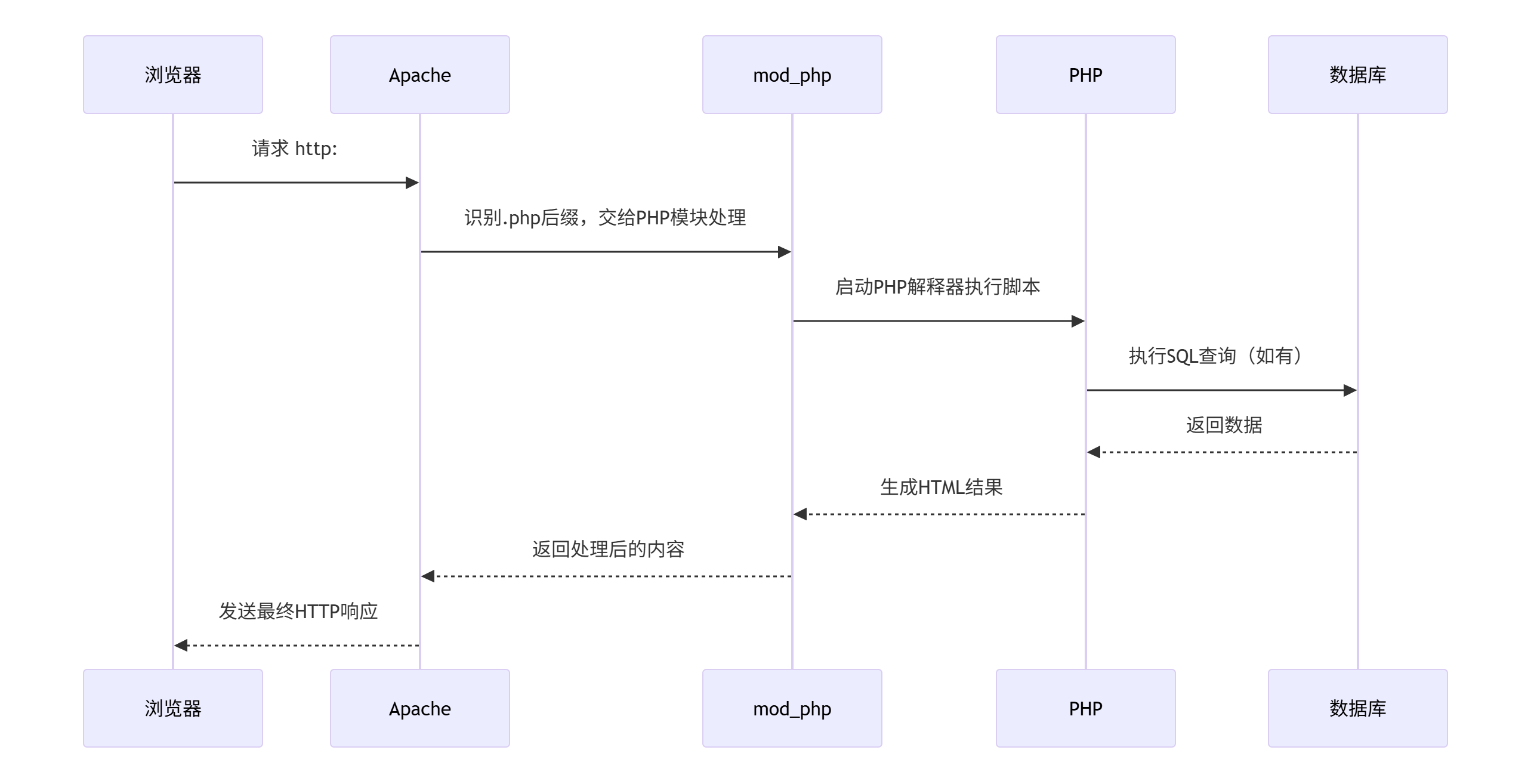
php apache构建 Web 服务器
虚拟机配置流程winsever2016配置Apache、Mysql、php_windows server 2016配置web服务器-CSDN博客 PHP 和 Apache 通过 模块化协作 共同构建 Web 服务器,以下是它们的交互机制和工作流程: 一、核心组件分工 组件角色ApacheWeb …...
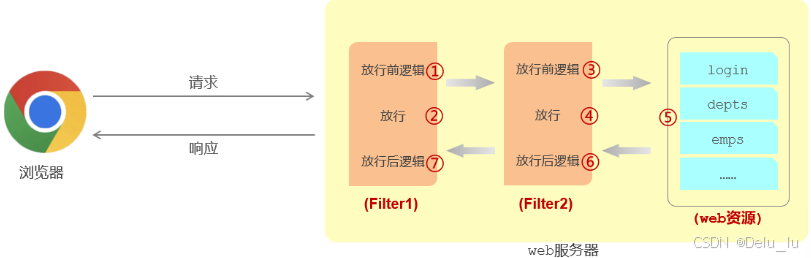
SpringBoot十二、SpringBoot系列web篇之过滤器Filte详解
一、前言 JavaWeb三大组件Servlet、Filter、Listener,其中之一便是过滤器Filter。 其实,Filter我们平常用的不多,一般多为项目初期搭建web架构的时候使用,后面用的就少了,在日常业务开发中不太可能碰到需要手写Filte…...

【知识扫盲】分布式系统架构或分布式服务中的管理面,数据面和业务面
🧩 一、三大“面”的定义与职责(以大模型推理平台为例) 层级英文名职责关键组件举例数据面Data Plane处理用户请求、模型推理、输入输出数据转换等核心任务模型服务引擎、Tokenizer/Detokenizer、推理加速器(TensorRT、ONNX Runt…...