INS 量测更新
5 量测更新
5.1 GNSS位置及速度更新
r ^ G P S , i n = r ^ I M U n + D R − 1 C b n l b v ^ G P S , i n = v ^ I M U n + ω i n n × C b n l b − C b n ω i b b × l b \begin{aligned} \hat{r}_{GPS,i}^{n} &= \hat{r}_{IMU}^{n} + D_{R}^{-1}C_{b}^{n} l^b\\ \hat{v}_{GPS,i}^{n} &= \hat{v}_{IMU}^{n} + \omega_{in}^{n}\times C_{b}^{n}l^b - C_{b}^{n}\omega_{ib}^{b}\times l^b \end{aligned} r^GPS,inv^GPS,in=r^IMUn+DR−1Cbnlb=v^IMUn+ωinn×Cbnlb−Cbnωibb×lb
其中
v ^ G P S , i n = v ^ I M U n − C b n ω n b b × l b = v ^ I M U n − C b n ( ω n i b + ω i b b ) × l b = v ^ I M U n + C b n ω i n b × l b − C b n ω i b b × l b = v ^ I M U n + C b n ω i n b × C n b C b n l b − C b n ω i b b × l b = v ^ I M U n + ω i n n × C b n l b − C b n ω i b b × l b \begin{aligned} \hat{v}_{GPS,i}^{n} &= \hat{v}_{IMU}^{n} - C_{b}^{n}\omega_{nb}^{b}\times l^b\\ &= \hat{v}_{IMU}^{n} - C_{b}^{n}(\omega_{ni}^{b} + \omega_{ib}^{b})\times l^b\\ &= \hat{v}_{IMU}^{n} + C_{b}^{n}\omega_{in}^{b}\times l^b - C_{b}^{n}\omega_{ib}^{b}\times l^b\\ &= \hat{v}_{IMU}^{n} + C_{b}^{n}\omega_{in}^{b}\times C_{n}^{b}C_{b}^{n}l^b - C_{b}^{n}\omega_{ib}^{b}\times l^b\\ &= \hat{v}_{IMU}^{n} + \omega_{in}^{n}\times C_{b}^{n}l^b - C_{b}^{n}\omega_{ib}^{b}\times l^b\\ \end{aligned} v^GPS,in=v^IMUn−Cbnωnbb×lb=v^IMUn−Cbn(ωnib+ωibb)×lb=v^IMUn+Cbnωinb×lb−Cbnωibb×lb=v^IMUn+Cbnωinb×CnbCbnlb−Cbnωibb×lb=v^IMUn+ωinn×Cbnlb−Cbnωibb×lb根据上式可以导出观测方程,首先导出位置的观测方程:
r ^ G P S , i n = r ^ I M U n + D R − 1 C ^ b n l b r ^ G P S , i n = r I M U n + δ r I M U n + D R − 1 ( I − ϕ × ) l n r ^ G P S , i n − r I M U n + D R − 1 l n = δ r I M U n + D R − 1 l n × ϕ \begin{aligned} \hat{r}_{GPS,i}^{n} &= \hat{r}_{IMU}^{n} + D_{R}^{-1}\hat{C}_{b}^{n} l^b\\ \hat{r}_{GPS,i}^{n} &= r_{IMU}^{n} + \delta r_{IMU}^{n} + D_{R}^{-1}(I-\phi\times)l^n\\ \hat{r}_{GPS,i}^{n} - r_{IMU}^{n} + D_{R}^{-1}l^n &= \delta r_{IMU}^{n} + D_{R}^{-1}l^n\times\phi \\ \end{aligned} r^GPS,inr^GPS,inr^GPS,in−rIMUn+DR−1ln=r^IMUn+DR−1C^bnlb=rIMUn+δrIMUn+DR−1(I−ϕ×)ln=δrIMUn+DR−1ln×ϕ然后再导出速度的观测方程:
v ^ G P S , i n = v ^ I M U n + ω i n n × C ^ b n l b − C ^ b n ω i b b × l b v ^ G P S , i n = v I M U n + δ v I M U n + ω i n n × ( I + ϕ × ) C b n l b − ( I + ϕ × ) C b n ω i b b × l b v ^ G P S , i n = v I M U n + δ v I M U n + ω i n n × l n + ω i n n × ϕ × l n − C b n ω i b b × l b − ϕ × C b n ω i b b × l b v ^ G P S , i n = v I M U n + δ v I M U n + ω i n n × l n − ω i n n × l n × ϕ − C b n ω i b b × l b + C b n ω i b b × l b × ϕ v ^ G P S , i n − v I M U n − ω i n n × l n + C n b ω i b b × l b = δ v I M U n − ω i n n × l n × ϕ + C b n ω i b b × l b × ϕ \begin{aligned} \hat{v}_{GPS,i}^{n} &= \hat{v}_{IMU}^{n} + \omega_{in}^{n}\times \hat{C}_{b}^{n}l^b - \hat{C}_{b}^{n}\omega_{ib}^{b}\times l^b \\ \hat{v}_{GPS,i}^{n} &= v_{IMU}^{n} +\delta v_{IMU}^{n} + \omega_{in}^{n}\times (I+\phi\times) C_{b}^{n}l^b - (I+\phi\times)C_{b}^{n}\omega_{ib}^{b}\times l^b \\ \hat{v}_{GPS,i}^{n} &= v_{IMU}^{n} +\delta v_{IMU}^{n} + \omega_{in}^{n}\times l^n +\omega_{in}^{n}\times \phi\times l^n - C_{b}^{n}\omega_{ib}^{b}\times l^b -\phi\times C_{b}^{n}\omega_{ib}^{b}\times l^b \\ \hat{v}_{GPS,i}^{n} &= v_{IMU}^{n} +\delta v_{IMU}^{n} + \omega_{in}^{n}\times l^n - \omega_{in}^{n}\times l^n\times\phi - C_{b}^{n}\omega_{ib}^{b}\times l^b + C_{b}^{n}\omega_{ib}^{b}\times l^b\times\phi \\ \hat{v}_{GPS,i}^{n} &- v_{IMU}^{n} - \omega_{in}^{n}\times l^n + C_{n}^{b}\omega_{ib}^{b}\times l^b = \delta v_{IMU}^{n} - \omega_{in}^{n}\times l^n\times\phi + C_{b}^{n}\omega_{ib}^{b}\times l^b\times\phi \\ \end{aligned} v^GPS,inv^GPS,inv^GPS,inv^GPS,inv^GPS,in=v^IMUn+ωinn×C^bnlb−C^bnωibb×lb=vIMUn+δvIMUn+ωinn×(I+ϕ×)Cbnlb−(I+ϕ×)Cbnωibb×lb=vIMUn+δvIMUn+ωinn×ln+ωinn×ϕ×ln−Cbnωibb×lb−ϕ×Cbnωibb×lb=vIMUn+δvIMUn+ωinn×ln−ωinn×ln×ϕ−Cbnωibb×lb+Cbnωibb×lb×ϕ−vIMUn−ωinn×ln+Cnbωibb×lb=δvIMUn−ωinn×ln×ϕ+Cbnωibb×lb×ϕ
5.2 轮速计
5.3 Lidar
相关文章:

INS 量测更新
5 量测更新 5.1 GNSS位置及速度更新 r ^ G P S , i n r ^ I M U n D R − 1 C b n l b v ^ G P S , i n v ^ I M U n ω i n n C b n l b − C b n ω i b b l b \begin{aligned} \hat{r}_{GPS,i}^{n} & \hat{r}_{IMU}^{n} D_{R}^{-1}C_{b}^{n} l^b\\ \hat{v}_{GPS…...

【ssh基础知识】
ssh基础知识 常用命令登录流程配置文件ssh密钥登录生成密钥上传公钥关闭密码登录 ssh服务管理查看日志ssh端口转发 ssh(ssh客户端)是一个用于登录到远程机器并在远程机器上执行命令的程序。 它旨在提供安全的加密通信在不安全的网络上的两个不受信任的主…...

04 开发第一个组件
概述 在Vue3中,一个组件就是一个.vue文件。 在本小节中,我们来开发第一个Vue3组件。这个组件的功能非常的简单,只需要在浏览器上输出一个固定的字符串”欢迎跟着Python私教一起学Vue3“即可。 实现步骤 第一步:新增src/compon…...

【Unity】如何让Unity程序一打开就运行命令行命令
【背景】 Unity程序有时依赖于某些服务去实现一些功能,此时可能需要类似打开程序就自动运行Windows命令行命令的功能。 【方法】 using UnityEngine; using System.Diagnostics; using System.Threading.Tasks; using System.IO; using System.Text...
Web前端-HTML(表格与表单)
文章目录 1.表格与表单1.1 概述 2.表格 table2.1 表格概述2.2. 创建表格2.3 表格属性2.4. 表头单元格标签th2.5 表格标题caption(了解)2.6 合并单元格(难点)2.7 总结表格 3. 表单标签(重点)3.1 概述3.2 form表单3.3 input 控件(重点)type 属性value属性值…...

Android RecycleView实现平滑滚动置顶和调整滚动速度
目录 一、滑动到指定位置(target position)并且置顶 1. RecycleView默认的几个实现方法及缺陷 2. 优化源码实现置顶方案 二、调整平移滑动速率 三、其他方案:置顶、置顶加偏移、居中 1. 其他置顶方案 2. 置顶加偏移 3. 滚动居中 在实…...

跳跃游戏 + 45. 跳跃游戏 II
给你一个非负整数数组 nums ,你最初位于数组的 第一个下标 。数组中的每个元素代表你在该位置可以跳跃的最大长度。 判断你是否能够到达最后一个下标,如果可以,返回 true ;否则,返回 false 。 示例 1: 输…...
)
在Django中使用多语言(i18n)
在Django中使用多语言 配置中间件 MIDDLEWARE [......django.contrib.sessions.middleware.SessionMiddleware,django.middleware.locale.LocaleMiddleware, # 此行重点django.middleware.common.CommonMiddleware,...... ]配置翻译文件目录 根目录下创建目录locale # 国…...
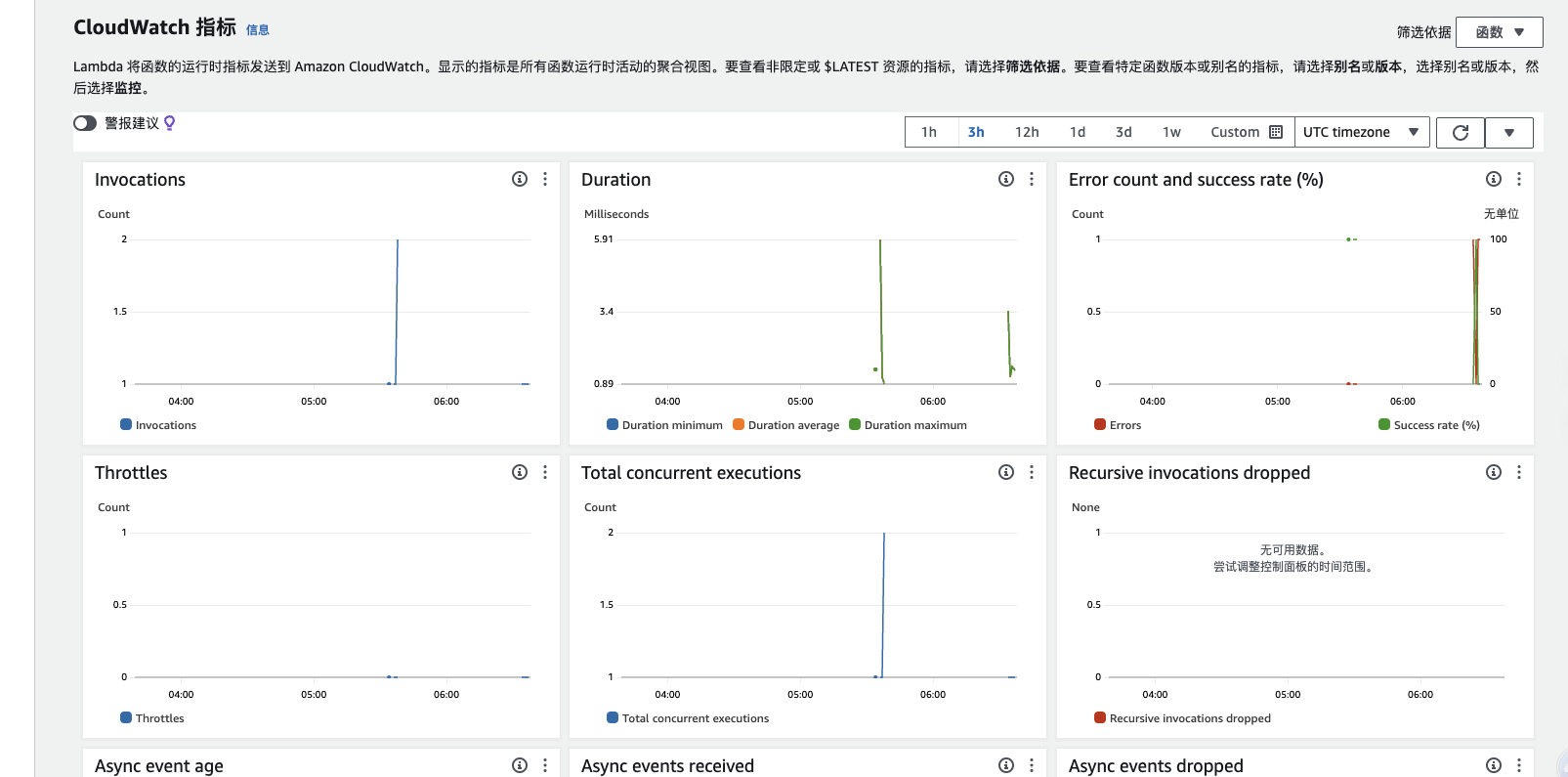
高性价比AWS Lambda无服务体验
前言 之前听到一个讲座说到AWS Lambda服务,基于Serverless无服务模型,另外官网还免费提供 100 万个请求 按月,包含在 AWS 免费套餐中是真的很香,对于一些小型的起步的网站或者用户量不大的网站,简直就是免费ÿ…...
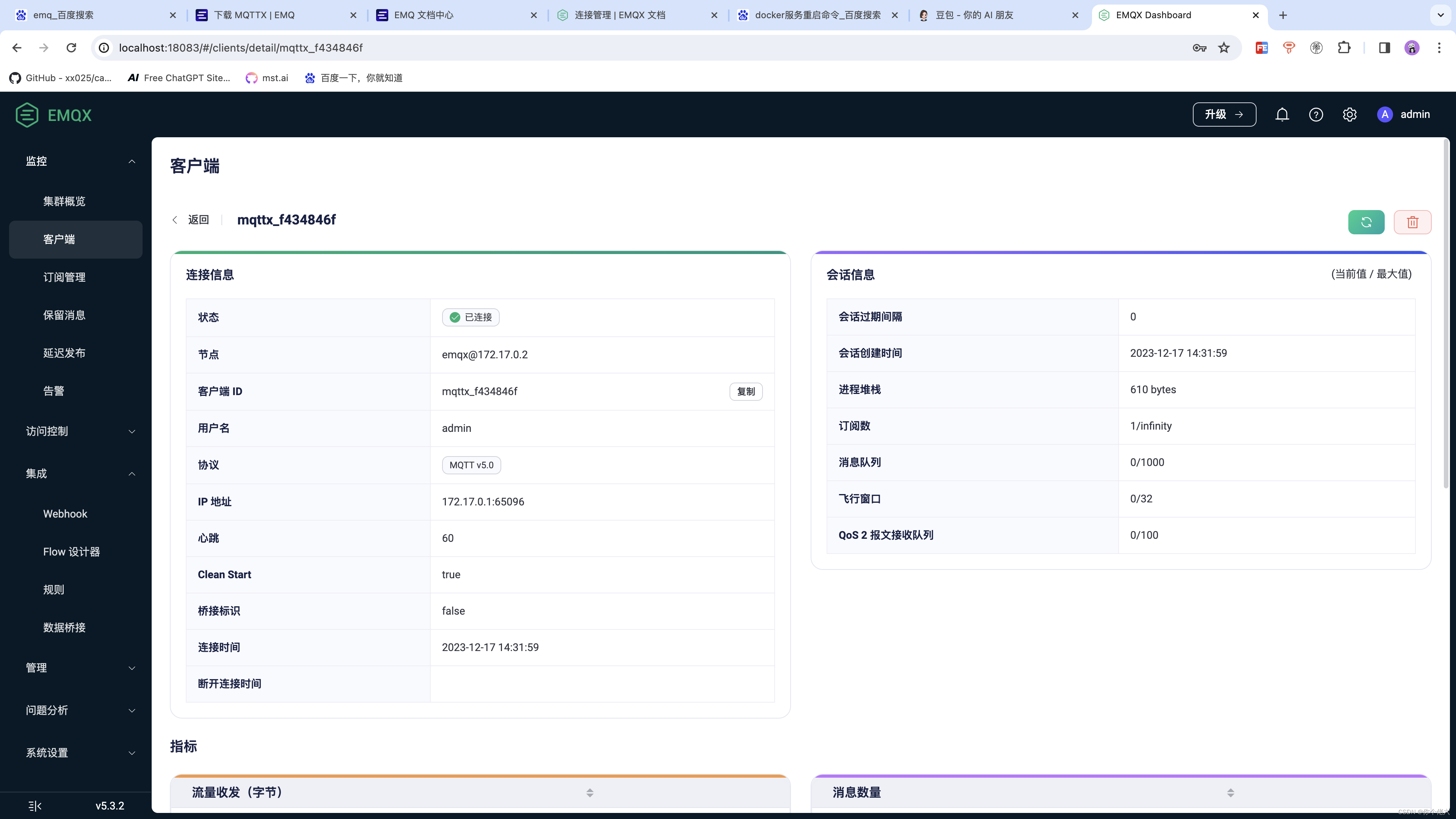
【物联网】EMQX(二)——docker快速搭建EMQX 和 MQTTX客户端使用
一、前言 在上一篇文章中,小编向大家介绍了物联网必然会用到的消息服务器EMQ,相信大家也对EMQ有了一定的了解,那么接下来,小编从这篇文章正式开始展开对EMQ的学习教程,本章节来记录一下如何对EMQ进行安装。 二、使用…...
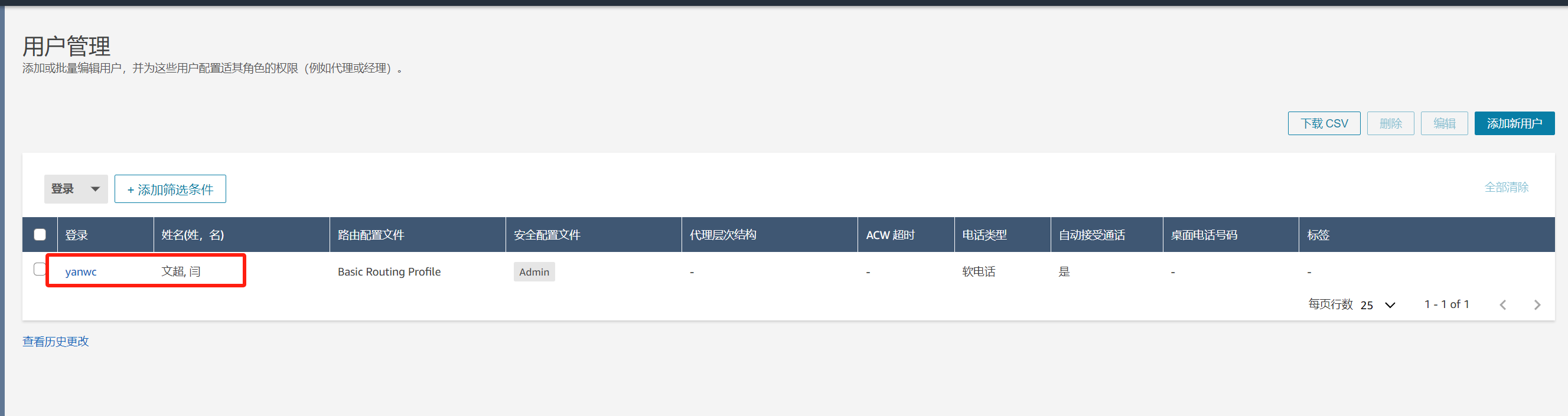
2023 亚马逊云科技 re:lnvent 大会探秘: Amazon Connect 全渠道云联络中心
2023 亚马逊云科技 re:lnvent 大会探秘: Amazon Connect 全渠道云联络中心 前言一. Amazon Connect 介绍 🗺️二. Amazon Connect 使用教程 🗺️1.我们打开URl链接找到对应服务2.输入Amazon Connect选中第一个点击进入即可;3.在进入之后我们就…...

鸿蒙开发之用户隐私权限申请
一、简介 鸿蒙开发过程中可用于请求的权限一共有两种:normal和system_basic。以下内容摘自官网: normal权限 normal 权限允许应用访问超出默认规则外的普通系统资源。这些系统资源的开放(包括数据和功能)对用户隐私以及其他应用带…...

Docker笔记:简单部署 nodejs 项目和 golang 项目
docker 简单的维护 nodejs 项目容器 1 )Nodejs 程序 const express require(express) const app express()app.get(/, (req, res) > {res.send(首页) })app.get(/news, (req, res) > {res.send(news) })// dokcer 做端口映射不要指定ip app.listen(3000)2…...
java内置的数据结构
Java语言提供了许多内置的数据结构,包括: 1. 数组(Array):数组是最基本的数据结构之一,它是一个有序的元素集合,每个元素都有一个对应的索引。在Java中,数组可以通过声明和初始化来创…...
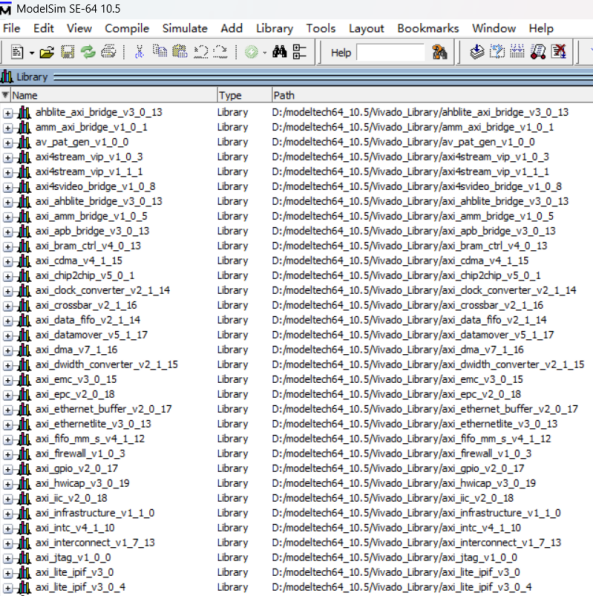
轻松搭建FPGA开发环境:第三课——Vivado 库编译与设置说明
工欲善其事必先利其器,很多人想从事FPGA的开发,但是不知道如何下手。既要装这个软件,又要装那个软件,还要编译仿真库,网上的教程一大堆,不知道到底应该听谁的。所以很多人还没开始就被繁琐的开发环境搭建吓…...
PostgreSQL-Dropdb命令删除数据库)
【PostgreSQL】从零开始:(十一)PostgreSQL-Dropdb命令删除数据库
dropdb命令删除数据库 命令 [postgrespostgre-sql bin]$ dropdb --help dropdb removes a PostgreSQL database.Usage:dropdb [OPTION]... DBNAMEOptions:-e, --echo show the commands being sent to the server-f, --force try to terminate …...

UDP网络编程其他相关事项
netstat指令 netstat -an 可以查看当前主机网络情况,包括端口监听情况和网络连接情况。 netstat -an | more 可以分页显示。 要求在dos控制台下执行。 说明:(1)Listening表示某个端口在监听;(2…...

Redhat LINUX 9.3 + PG 16.1 搭建主备流复制
一直想搭建一个PG流复制,最近正好有一个新环境,操作系统是最新的,rhel 9.3,数据库是最新的 pg 16.1,借鉴了网上的步骤,尤其是小工到专家的内容,在此谢过。 1.安装环境 1)IP: 主:192.168.133.151…...

kafka设置消费者组
安装部署后 consumer.properties group.idtest-group 单机测试,自己开俩窗口,一个测试消费者,一个测试生产者(创建消息那步) 创建主题 bin/kafka-topics.sh --create --bootstrap-server localhost:9092 --replica…...

Worker-Thread设计模式
Worker-Thread模式类似于工厂流水线,有时也称为流水线设计模式。线程池在某种意义上也算是Worker-Thread模式的一种实现,线程池初始化时创建线程类似于在流水线等待工作的工人,提交给线程池的Runnable接口类似于需要加工的产品,Ru…...

UE5 学习系列(二)用户操作界面及介绍
这篇博客是 UE5 学习系列博客的第二篇,在第一篇的基础上展开这篇内容。博客参考的 B 站视频资料和第一篇的链接如下: 【Note】:如果你已经完成安装等操作,可以只执行第一篇博客中 2. 新建一个空白游戏项目 章节操作,重…...

中南大学无人机智能体的全面评估!BEDI:用于评估无人机上具身智能体的综合性基准测试
作者:Mingning Guo, Mengwei Wu, Jiarun He, Shaoxian Li, Haifeng Li, Chao Tao单位:中南大学地球科学与信息物理学院论文标题:BEDI: A Comprehensive Benchmark for Evaluating Embodied Agents on UAVs论文链接:https://arxiv.…...

系统设计 --- MongoDB亿级数据查询优化策略
系统设计 --- MongoDB亿级数据查询分表策略 背景Solution --- 分表 背景 使用audit log实现Audi Trail功能 Audit Trail范围: 六个月数据量: 每秒5-7条audi log,共计7千万 – 1亿条数据需要实现全文检索按照时间倒序因为license问题,不能使用ELK只能使用…...
剑指offer20_链表中环的入口节点
链表中环的入口节点 给定一个链表,若其中包含环,则输出环的入口节点。 若其中不包含环,则输出null。 数据范围 节点 val 值取值范围 [ 1 , 1000 ] [1,1000] [1,1000]。 节点 val 值各不相同。 链表长度 [ 0 , 500 ] [0,500] [0,500]。 …...

Qt Http Server模块功能及架构
Qt Http Server 是 Qt 6.0 中引入的一个新模块,它提供了一个轻量级的 HTTP 服务器实现,主要用于构建基于 HTTP 的应用程序和服务。 功能介绍: 主要功能 HTTP服务器功能: 支持 HTTP/1.1 协议 简单的请求/响应处理模型 支持 GET…...
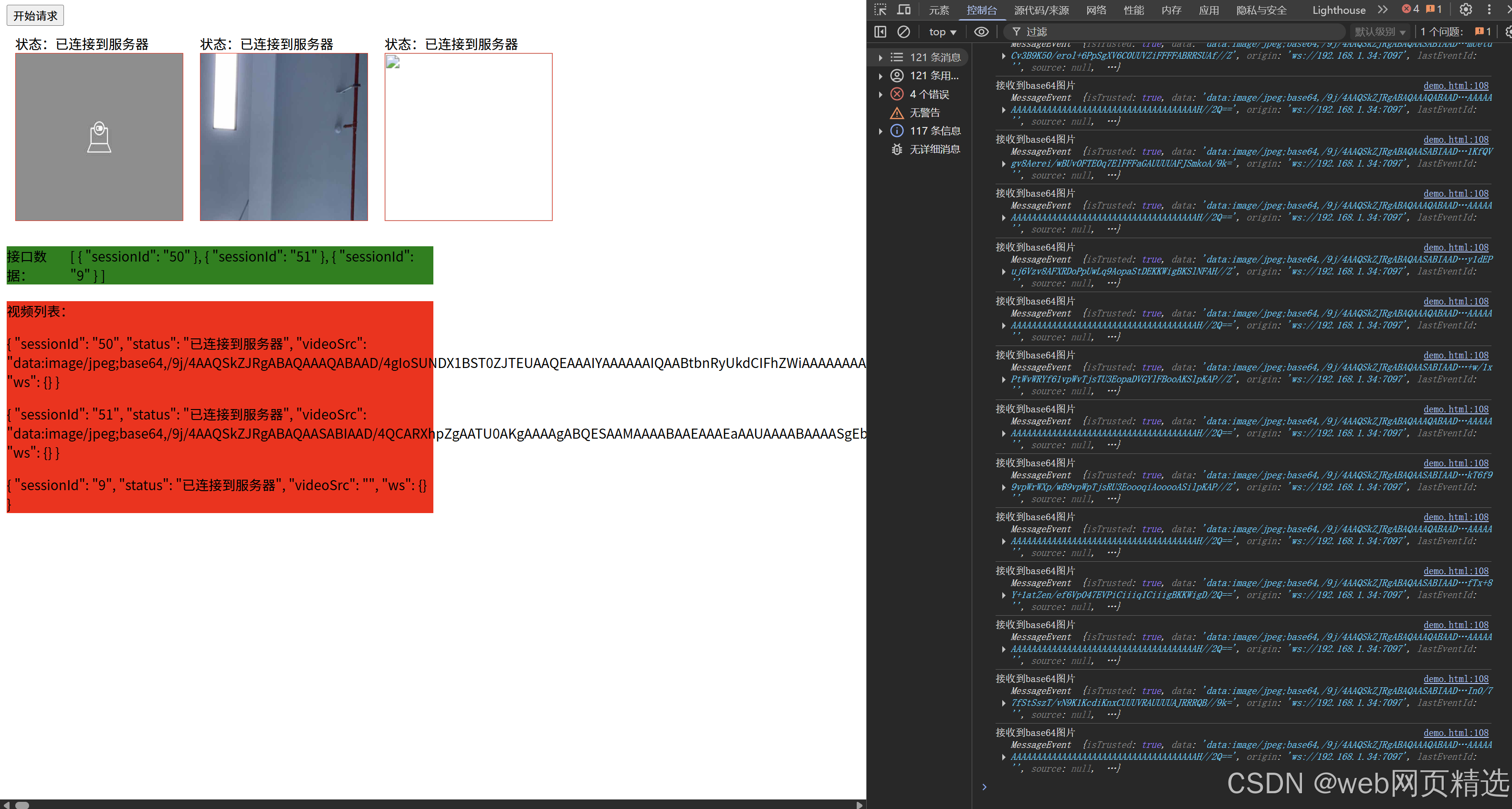
uniapp微信小程序视频实时流+pc端预览方案
方案类型技术实现是否免费优点缺点适用场景延迟范围开发复杂度WebSocket图片帧定时拍照Base64传输✅ 完全免费无需服务器 纯前端实现高延迟高流量 帧率极低个人demo测试 超低频监控500ms-2s⭐⭐RTMP推流TRTC/即构SDK推流❌ 付费方案 (部分有免费额度&#x…...

Axios请求超时重发机制
Axios 超时重新请求实现方案 在 Axios 中实现超时重新请求可以通过以下几种方式: 1. 使用拦截器实现自动重试 import axios from axios;// 创建axios实例 const instance axios.create();// 设置超时时间 instance.defaults.timeout 5000;// 最大重试次数 cons…...

MySQL账号权限管理指南:安全创建账户与精细授权技巧
在MySQL数据库管理中,合理创建用户账号并分配精确权限是保障数据安全的核心环节。直接使用root账号进行所有操作不仅危险且难以审计操作行为。今天我们来全面解析MySQL账号创建与权限分配的专业方法。 一、为何需要创建独立账号? 最小权限原则…...
佰力博科技与您探讨热释电测量的几种方法
热释电的测量主要涉及热释电系数的测定,这是表征热释电材料性能的重要参数。热释电系数的测量方法主要包括静态法、动态法和积分电荷法。其中,积分电荷法最为常用,其原理是通过测量在电容器上积累的热释电电荷,从而确定热释电系数…...
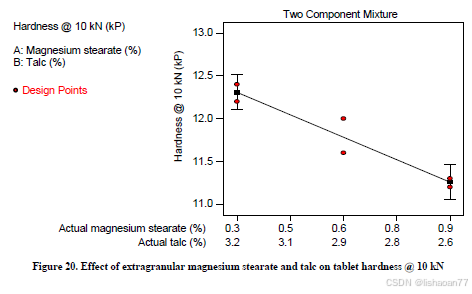
R语言速释制剂QBD解决方案之三
本文是《Quality by Design for ANDAs: An Example for Immediate-Release Dosage Forms》第一个处方的R语言解决方案。 第一个处方研究评估原料药粒径分布、MCC/Lactose比例、崩解剂用量对制剂CQAs的影响。 第二处方研究用于理解颗粒外加硬脂酸镁和滑石粉对片剂质量和可生产…...