树莓派,opencv,Picamera2利用舵机云台追踪人脸(PID控制)
一、需要准备的硬件
- Raspiberry Pi 4b
- 两个SG90 180度舵机(注意舵机的角度,最好是180度且带限位的,切勿选360度舵机)
- 二自由度舵机云台(如下图)
- Raspiberry CSI 摄像头
组装后的效果:

二、项目目标
追踪人脸:
当人脸移动时,摄像头通过控制两个伺服电机(分别是偏航和俯仰)把该人脸放到视界的中心位置,本文采用了PID控制伺服电机
三、具体步骤
3.1 下载用于人脸识别的级联分类器
下载级联分类器“haarcascade_frontalface_default.xml”,下载地址:haarcascade_frontalface_default.xml
下载完成后将其与后面的所有文件放到同一目录中。
3.2人脸追踪代码
- 创建文件“face_tracking_PID.py” ,代码如下:
#face_tracking_PID.py
#-*- coding: UTF-8 -*-
# 调用必需库
from multiprocessing import Manager
from multiprocessing import Process
from objcenter import ObjCenter
from pid import PID
from servo import Servo
import argparse
import signal
import time
import sys
import cv2
from picamera2 import Picamera2# 定义舵机
pan=Servo(pin=19)
tilt=Servo(pin=16)#定义图像尺寸
dispW=1280
dispH=720# 键盘终止函数
def signal_handler(sig, frame):# 输出状态信息print("[INFO] You pressed `ctrl + c`! Exiting...")# 关闭舵机pan.stop()tilt.stop()# 退出sys.exit()def obj_center(args, objX, objY, centerX, centerY):# ctrl+c退出进程signal.signal(signal.SIGINT, signal_handler)# 启动视频流并缓冲print("[INFO] waiting for camera to warm up...")cv2.startWindowThread()picam2 = Picamera2()preview_config = picam2.create_preview_configuration(main={"size": (dispW, dispH),"format":"RGB888"})picam2.configure(preview_config)picam2.start()time.sleep(2.0)# 初始化人脸中心探测器obj = ObjCenter(args["cascade"])# 进入循环while True:# 从视频流抓取图像并旋转frame= picam2.capture_array()frame = cv2.flip(frame, 1)# 找到图像中心(H, W) = frame.shape[:2]centerX.value = W // 2centerY.value = H // 2#draw a point in the center of framecv2.circle(frame, (centerX.value, centerY.value), 5, (0, 0, 255), -1)# 找到人脸中心objectLoc = obj.update(frame, (centerX.value, centerY.value))((objX.value, objY.value), rect) = objectLocprint("objx.value", objX.value)print("objy.value", objY.value)# 绘制人脸外界矩形if rect is not None:(x, y, w, h) = rectcv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)fX = int(x + (w / 2.0))fY = int(y + (h / 2.0))cv2.circle(frame, (fX, fY), 5, (0, 0, 255), -1)# 在人脸中心和视窗中心画一条连线cv2.line(frame, (centerX.value, centerY.value),(fX, fY), (0, 255, 0), 2)# 显示图像cv2.imshow("Pan-Tilt Face Tracking", frame)cv2.waitKey(1)def pid_process(output, p, i, d, objCoord, centerCoord):# ctrl+c退出进程signal.signal(signal.SIGINT, signal_handler)# 创建一个PID类的对象并初始化p = PID(p.value, i.value, d.value)p.initialize()# 进入循环while True:# 计算误差error = centerCoord.value - objCoord.value# 更新输出值,当error小于50时,误差设为0,以避免云台不停运行。if abs(error) < 50:error = 0output.value = p.update(error)def set_servos(panAngle, tiltAngle):# ctrl+c退出进程signal.signal(signal.SIGINT, signal_handler)#进入循环while True:# 偏角变号yaw = -1 * panAngle.valuepitch = -1 * tiltAngle.value# 设置舵机角度。pan.set_angle(yaw)tilt.set_angle(pitch)# 启动主程序
if __name__ == "__main__":# 建立语法分析器ap = argparse.ArgumentParser()ap.add_argument("-c", "--cascade", type=str, required=True,help="path to input Haar cascade for face detection")args = vars(ap.parse_args())# 启动多进程变量管理with Manager() as manager: #相当于manager=Manager(),with as 语句操作上下文管理器(context manager),它能够帮助我们自动分配并且释放资源。# 舵机角度置零pan.set_angle(0)tilt.set_angle(0)# 为图像中心坐标赋初值centerX = manager.Value("i", 0) #"i"即为整型integercenterY = manager.Value("i", 0)# 为人脸中心坐标赋初值objX = manager.Value("i", 0)objY = manager.Value("i", 0)# panAngle和tiltAngle分别是两个舵机的PID控制输出量 panAngle = manager.Value("i", 0)tiltAngle = manager.Value("i", 0)# 设置一级舵机的PID参数panP = manager.Value("f", 0.015) # "f"即为浮点型floatpanI = manager.Value("f", 0.01)panD = manager.Value("f", 0.0008)# 设置二级舵机的PID参数tiltP = manager.Value("f", 0.025)tiltI = manager.Value("f", 0.01)tiltD = manager.Value("f", 0.008)# 创建4个独立进程# 1. objectCenter - 探测人脸# 2. panning - 对一级舵机进行PID控制,控制偏航角# 3. tilting - 对二级舵机进行PID控制,控制俯仰角# 4. setServos - 根据PID控制的输出驱动舵机processObjectCenter = Process(target=obj_center,args=(args, objX, objY, centerX, centerY))processPanning = Process(target=pid_process,args=(panAngle, panP, panI, panD, objX, centerX))processTilting = Process(target=pid_process,args=(tiltAngle, tiltP, tiltI, tiltD, objY, centerY))processSetServos = Process(target=set_servos, args=(panAngle, tiltAngle))# 开启4个进程processObjectCenter.start()processPanning.start()processTilting.start()processSetServos.start()# 添加4个进程processObjectCenter.join()processPanning.join()processTilting.join()processSetServos.join()- 创建文件“objcenter.py”,代码如下:
#objcenter.py
#-*- coding: UTF-8 -*-
# 调用必需库
import cv2class ObjCenter:def __init__(self, haarPath):# 加载人脸探测器self.detector = cv2.CascadeClassifier(haarPath)def update(self, frame, frameCenter):# 将图像转为灰度图gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)# 探测图像中的所有人脸rects = self.detector.detectMultiScale(gray, scaleFactor=1.05,minNeighbors=9, minSize=(30, 30),flags=cv2.CASCADE_SCALE_IMAGE)# 是否检测到人脸if len(rects) > 0:# 获取矩形的参数# x,y为左上角点坐标,w,h为宽度和高度# 计算图像中心(x, y, w, h) = rects[0]faceX = int(x + (w / 2.0))faceY = int(y + (h / 2.0))# 返回人脸中心return ((faceX, faceY), rects[0])# 如果没有识别到人脸,返回图像中心return (frameCenter, None)
- 创建“pid.py”,代码如下:
#pid.py
#-*- coding: UTF-8 -*-
# 调用必需库
import timeclass PID:def __init__(self, kP=1, kI=0, kD=0):# 初始化参数self.kP = kPself.kI = kIself.kD = kDdef initialize(self):# 初始化当前时间和上一次计算的时间self.currTime = time.time()self.prevTime = self.currTime# 初始化上一次计算的误差self.prevError = 0# 初始化误差的比例值,积分值和微分值self.cP = 0self.cI = 0self.cD = 0def update(self, error, sleep=0.2):# 暂停time.sleep(sleep)# 获取当前时间并计算时间差self.currTime = time.time()deltaTime = self.currTime - self.prevTime# 计算误差的微分deltaError = error - self.prevError# 比例项self.cP = error# 积分项self.cI += error * deltaTime# 微分项self.cD = (deltaError / deltaTime) if deltaTime > 0 else 0# 保存时间和误差为下次更新做准备self.prevTime = self.currTimeself.prevError = error# 返回输出值return sum([self.kP * self.cP,self.kI * self.cI,self.kD * self.cD])
- 上述代码中的from servo import Servo导入servo,这个库是没有的,我们要手动创建这个库,在object_tracking.py所在的目录下新建servo.py文件,复制下面的代码到文件中
#!/usr/bin/env python3
import pigpio
from time import sleep
# Start the pigpiod daemon
import subprocess
result = None
status = 1
for x in range(3):p = subprocess.Popen('sudo pigpiod', shell=True, stdout=subprocess.PIPE, stderr=subprocess.STDOUT)result = p.stdout.read().decode('utf-8')status = p.poll()if status == 0:breaksleep(0.2)
if status != 0:print(status, result)
'''
> Use the DMA PWM of the pigpio library to drive the servo
> Map the servo angle (0 ~ 180 degree) to (-90 ~ 90 degree)'''class Servo():MAX_PW = 1250 # 0.5/20*100MIN_PW = 250 # 2.5/20*100_freq = 50 # 50 Hz, 20msdef __init__(self, pin, min_angle=-90, max_angle=90):self.pi = pigpio.pi()self.pin = pin self.pi.set_PWM_frequency(self.pin, self._freq)self.pi.set_PWM_range(self.pin, 10000) self.angle = 0self.max_angle = max_angleself.min_angle = min_angleself.pi.set_PWM_dutycycle(self.pin, 0)def set_angle(self, angle):if angle > self.max_angle:angle = self.max_angleelif angle < self.min_angle:angle = self.min_angleself.angle = angleduty = self.map(angle, -90, 90, 250, 1250)self.pi.set_PWM_dutycycle(self.pin, duty)def get_angle(self):return self.angledef stop(self):self.pi.set_PWM_dutycycle(self.pin, 0)self.pi.stop()# will be called automatically when the object is deleted# def __del__(self):# passdef map(self, x, in_min, in_max, out_min, out_max):return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_minif __name__ =='__main__':from vilib import Vilib# Vilib.camera_start(vflip=True,hflip=True) # Vilib.display(local=True,web=True)pan = Servo(pin=13, max_angle=90, min_angle=-90)tilt = Servo(pin=12, max_angle=30, min_angle=-90)panAngle = 0tiltAngle = 0pan.set_angle(panAngle)tilt.set_angle(tiltAngle)sleep(1)while True:for angle in range(0, 90, 1):pan.set_angle(angle)tilt.set_angle(angle)sleep(.01)sleep(.5)for angle in range(90, -90, -1):pan.set_angle(angle)tilt.set_angle(angle)sleep(.01)sleep(.5)for angle in range(-90, 0, 1):pan.set_angle(angle)tilt.set_angle(angle)sleep(.01)sleep(.5)- 在树莓派相应文件目录中输入`“python face_tracking_PID.py --cascade haarcascade_frontalface_default.xml",即可实现对人脸对象自动追踪。相较之前的非PID控制而言,系统运行会更顺滑一些。在本例中采用的命令参数输入的方式,可以方便有多个人脸识别级联分类器时随时切换。
- 当运行时,可能会有摄像头随机摆动的现象出现,这是因为人脸识别级联分类器的识别过程中的误识别,对于普通用户我们还无能为力,只能是避开经常被误该识别的物体。
相关文章:
树莓派,opencv,Picamera2利用舵机云台追踪人脸(PID控制)
一、需要准备的硬件 Raspiberry Pi 4b两个SG90 180度舵机(注意舵机的角度,最好是180度且带限位的,切勿选360度舵机)二自由度舵机云台(如下图)Raspiberry CSI 摄像头 组装后的效果: 二、项目目…...

uniapp中推出当前微信小程序
uni.exitMiniProgram() 通过代码直接退出当前小程序 uni.exitMiniProgram({success: function() {console.log(退出小程序成功);},fail: function(err) {console.log(退出小程序失败, err);} })...

AndroidStudio无法新建aidl文件解决办法
我用的 AS 版本是 Android Studio Giraffe | 2022.3.1 Build #AI-223.8836.35.2231.10406996, built on June 29, 2023 右键新建 aidl 文件, 提示 (AIDL File)Requires setting the buildFeatures.aidl to true in the build file 解决办法 修改 app 的 build.…...

java爬虫(jsoup)如何设置HTTP代理ip爬数据
目录 前言 什么是HTTP代理IP 使用Jsoup设置HTTP代理IP的步骤 1. 导入Jsoup依赖 2. 创建HttpProxy类 3. 设置代理服务器 4. 使用Jsoup进行爬取 结论 前言 在Java中使用Jsoup进行网络爬虫操作时,有时需要使用HTTP代理IP来爬取数据。本文将介绍如何使用Jsoup设…...

ZooKeeper Client API 安装及使用指北
下载 wget https://archive.apache.org/dist/zookeeper/zookeeper-3.5.4-beta/zookeeper-3.5.4-beta.tar.gz解压 tar -zxf zookeeper-3.5.4-beta.tar.gz安装 cd zookeeper-3.5.4-beta/src/c/ ./configure make sudo make install到 make 这一步大概率会出现报错:…...
本机ping不通虚拟机
windows下finall shell连不上虚拟机了,之前是可以的,然后ping虚拟机,发现也ping不通,随后到处找问题。 在本地部分,控制面板 ——>网络和Internet——>网络连接 , 可以看到 VMnet1和Vmnet8虽然都是已…...

Linux cfdisk命令
Linux cfdisk命令用于磁盘分区。 cfdisk是用来磁盘分区的程序,它十分类似DOS的fdisk,具有互动式操作界面而非传统fdisk的问答式界面,您可以轻易地利用方向键来操控分区操作。 语法 cfdisk [-avz][-c <柱面数目>-h <磁头数目>-…...

实用学习网站和资料
github:https://github.com/GitHubDaily/GitHubDaily Linux操作手册: GitHub - abarrak/linux-sysops-handbook: Essentials of Linux system administration. 从零开始制作一个操作系统: GitHub - ruiers/os-tutorial-cn: 从零开始编写一个操作系统…...
【已解决】c++qt如何制作翻译供程序调用
本博文源于笔者正在编写的工具需要创建翻译文件,恰好将qt如何进行翻译,从零到结果进行读者查阅,并非常推荐读者进行收藏点赞,因为步步都很清晰,堪称胎教式c制作,而且内容还包括如何部署在windows下。堪称值…...
DPDK单步跟踪(3)-如何利用visual studio 2019和visual gdb来单步调试dpdk
准备工作 因为时间的关系,我想到哪说到哪,可能没那么高的完成度。 但其实有心的人,看到这个标题,就关了本文自己能做了。 why和how to build debug version DPDK,见前两篇。这里我们准备开始。 首先,你有一台linux机…...

Python爬虫---解析---BeautifulSoup
BeautifulSoup简称:bs4 作用:解析和提取数据 1. 安装:pip install bs4 或pip install bs4 -i https://pypi.douban.com/simple(使用国内镜像下载) 注意:需要安装在python解释器相同的位置,例如…...

Argument list too long when copying files
for i in /path/to/dir/*; do cp "$i" /path/to/other/dir/; done...

configure
configure 配置软件./configure --prefix$PWD/output CCaarch64-linux-gcc --hostaarch64-linux --enable-shared --enable-staticconfig.sub 文件 这个文件用于确定主机系统的类型,并返回与该系统相关的标识符。它包含一系列 shell 函数,用于检测主机…...
HOJ 项目部署-前端定制 默认勾选显示标签、 在线编辑器主题和字号大小修改、增加一言功能 题目AC后礼花绽放
# 项目拉取地址: https://gitee.com/himitzh0730/hoj.git # 切换到hoj-vue目录执行以下命令 #安装依赖 npm install #运行服务 npm run serve #修改代码后构建项目到dist文件夹,到服务器docker-compose.yml中修改hoj-frontend文件映射即可 npm run build…...
)
Scikit-Learn线性回归(二)
Scikit-Learn线性回归二:多项式回归 1、多项式回归2、多项式回归的原理3、Scikit-Learn多项式回归3.1、Scikit-Learn多项式回归API1、多项式回归 线性回归研究的是一个自变量与一个因变量之间的回归问题。在实际应用中,并不是所有的情景都符合线性关系,大多数情况都是非线性…...
07 Vue3框架简介
文章目录 一、Vue3简介1. 简介2. 相关网站3. 前端技术对比4. JS前端框架5. Vue核心内容6. 使用方式 二、基础概念1. 创建一个应用2. 变量双向绑定(v-model)3. 条件控制(v-if)4. 数组遍历(v-for)5. 绑定事件…...
)
前端八股文(js篇)
一.强制类型转换规则 首先需要了解隐式转换所调用的函数。 当程序员显示调用Boolean(value),Number(value),String(value)完成的类型转换,叫做显示类型转换。 当通过new Boolean&…...
windows+ubuntu离线安装翻译软件有道词典
背景: 某些情况下,需要在无法连接互联网的电脑上翻译单词,句子以及段落,就需要能离线安装和翻译的翻译软件,具备一定的词库量,目前找到了《有道词典》。 windows 亲测,无法联网的win10中安装…...

DevC++ easyx实现视口编辑,在超过屏幕大小的地图上画点,与解决刮刮乐bug效果中理解C语言指针的意义
继上篇文案, DevC easyx实现地图拖动,超过屏幕大小的巨大地图的局部显示在屏幕的方法——用悬浮窗的原理来的实现一个视口-CSDN博客 实现了大地图拖动,但是当时野心不止,就想着一气能搓啥就继续搓啥,看着地图移动都搓…...

Kali Linux—借助 SET+MSF 进行网络钓鱼、生成木马、获主机shell、权限提升、远程监控、钓鱼邮件等完整渗透测试(一)
社会工程学—世界头号黑客凯文米特尼克在《欺骗的艺术》中曾提到,这是一种通过对受害者心理弱点、本能反应、好奇心、信任、贪婪等心理陷阱进行诸如欺骗、伤害等危害手段。 SET最常用的攻击方法有:用恶意附件对目标进行 E-mail 钓鱼攻击、Java Applet攻…...

XML Group端口详解
在XML数据映射过程中,经常需要对数据进行分组聚合操作。例如,当处理包含多个物料明细的XML文件时,可能需要将相同物料号的明细归为一组,或对相同物料号的数量进行求和计算。传统实现方式通常需要编写脚本代码,增加了开…...
日语AI面试高效通关秘籍:专业解读与青柚面试智能助攻
在如今就业市场竞争日益激烈的背景下,越来越多的求职者将目光投向了日本及中日双语岗位。但是,一场日语面试往往让许多人感到步履维艰。你是否也曾因为面试官抛出的“刁钻问题”而心生畏惧?面对生疏的日语交流环境,即便提前恶补了…...

【磁盘】每天掌握一个Linux命令 - iostat
目录 【磁盘】每天掌握一个Linux命令 - iostat工具概述安装方式核心功能基础用法进阶操作实战案例面试题场景生产场景 注意事项 【磁盘】每天掌握一个Linux命令 - iostat 工具概述 iostat(I/O Statistics)是Linux系统下用于监视系统输入输出设备和CPU使…...
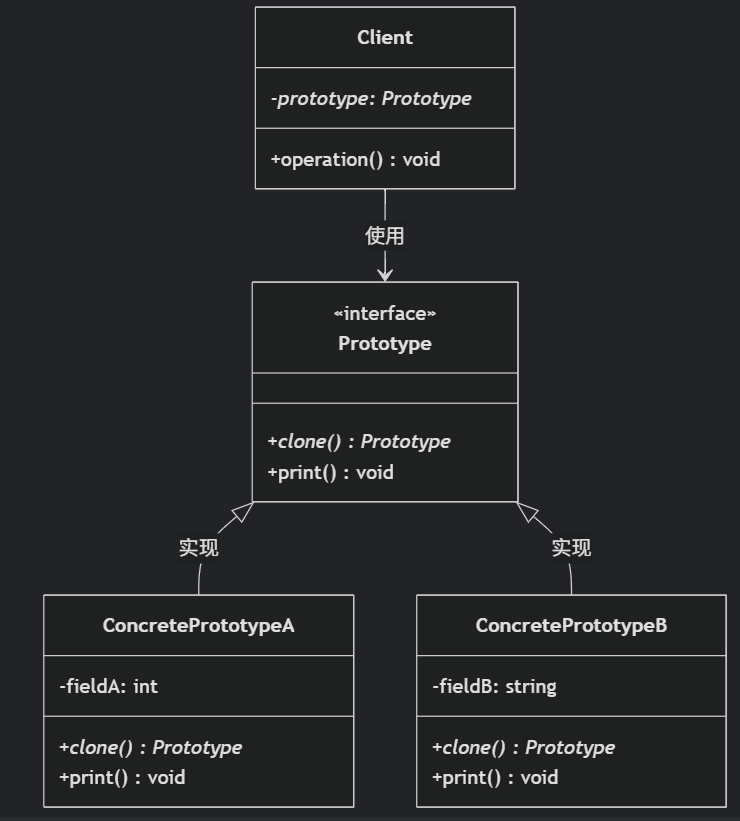
(二)原型模式
原型的功能是将一个已经存在的对象作为源目标,其余对象都是通过这个源目标创建。发挥复制的作用就是原型模式的核心思想。 一、源型模式的定义 原型模式是指第二次创建对象可以通过复制已经存在的原型对象来实现,忽略对象创建过程中的其它细节。 📌 核心特点: 避免重复初…...
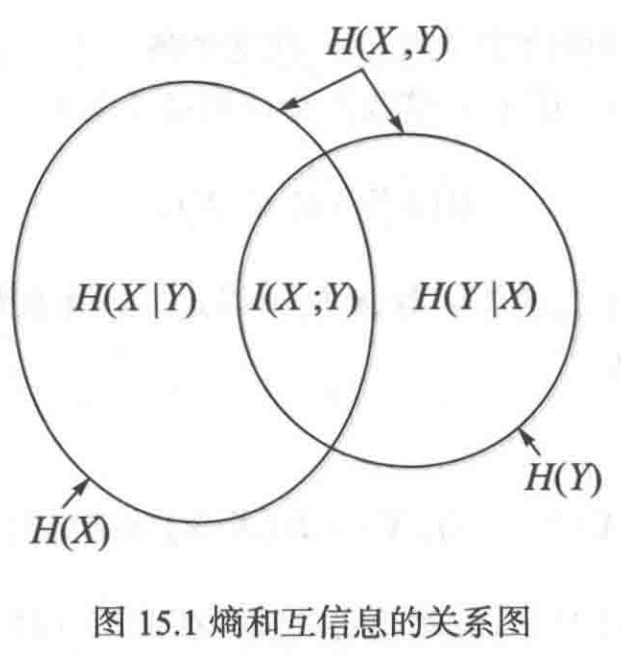
《通信之道——从微积分到 5G》读书总结
第1章 绪 论 1.1 这是一本什么样的书 通信技术,说到底就是数学。 那些最基础、最本质的部分。 1.2 什么是通信 通信 发送方 接收方 承载信息的信号 解调出其中承载的信息 信息在发送方那里被加工成信号(调制) 把信息从信号中抽取出来&am…...

【git】把本地更改提交远程新分支feature_g
创建并切换新分支 git checkout -b feature_g 添加并提交更改 git add . git commit -m “实现图片上传功能” 推送到远程 git push -u origin feature_g...
12.找到字符串中所有字母异位词
🧠 题目解析 题目描述: 给定两个字符串 s 和 p,找出 s 中所有 p 的字母异位词的起始索引。 返回的答案以数组形式表示。 字母异位词定义: 若两个字符串包含的字符种类和出现次数完全相同,顺序无所谓,则互为…...
听写流程自动化实践,轻量级教育辅助
随着智能教育工具的发展,越来越多的传统学习方式正在被数字化、自动化所优化。听写作为语文、英语等学科中重要的基础训练形式,也迎来了更高效的解决方案。 这是一款轻量但功能强大的听写辅助工具。它是基于本地词库与可选在线语音引擎构建,…...
NXP S32K146 T-Box 携手 SD NAND(贴片式TF卡):驱动汽车智能革新的黄金组合
在汽车智能化的汹涌浪潮中,车辆不再仅仅是传统的交通工具,而是逐步演变为高度智能的移动终端。这一转变的核心支撑,来自于车内关键技术的深度融合与协同创新。车载远程信息处理盒(T-Box)方案:NXP S32K146 与…...

无人机侦测与反制技术的进展与应用
国家电网无人机侦测与反制技术的进展与应用 引言 随着无人机(无人驾驶飞行器,UAV)技术的快速发展,其在商业、娱乐和军事领域的广泛应用带来了新的安全挑战。特别是对于关键基础设施如电力系统,无人机的“黑飞”&…...