blender scripting 编写
blender scripting 编写
- 一、查看ui按钮对应的代码
- 二、查看或修改对象名称
- 三、案例:渲染多张图片并导出对应的相机参数
一、查看ui按钮对应的代码

二、查看或修改对象名称
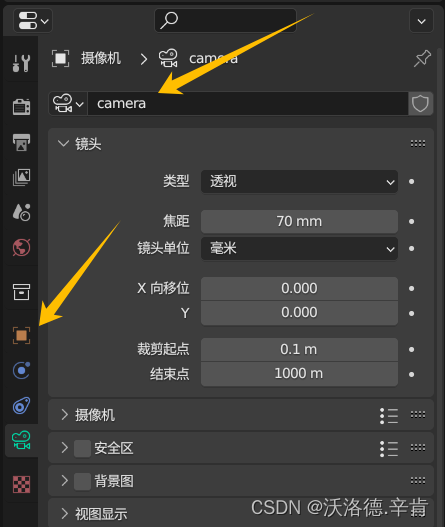
三、案例:渲染多张图片并导出对应的相机参数
注:通过ui交互都设置好,如果ui能渲染,该代码就能运行成功。
import bpy
import math
import os
from mathutils import Vector, Matrix
from math import radians
import bmesh
import datetime
import time
import numpy as np
import os
#from os import pathscenenumber='baseline_scene6_clean'#basefolder=os.path.join(os.path.expanduser('~'), 'Documents', 'Zantis', scenenumber)
scene = bpy.data.scenes["Scene"]
#scene.camera.rotation_mode='YZX'
def length():leg=0.00p1=[0.0,0.0]temp=0ob = bpy.context.object # active objectfor p in ob.data.splines.active.bezier_points:p2=p1p1=[p.co.x,p.co.y]if(temp==0):temp=1continuedistance = math.sqrt( ((p1[0]-p2[0])**2)+((p1[1]-p2[1])**2) )leg=leg+distancereturn legitem=0
multiply=40
camera = bpy.data.objects['Camera']
target=bpy.data.objects['mesh.001']
my_obj=[]#my_obj.append("019")
#my_obj.append("021")
#my_obj.append("029")
#my_obj.append("030")
#my_obj.append("031")
#my_obj.append("032")
#my_obj.append("033")
#my_obj.append("034")
my_obj.append("040")
#my_obj.append("042")t1 = time.time()#import bpy#for ob in bpy.context.selected_editable_objects:# ob.active_material_index = 0# for i in range(len(ob.material_slots)):
# bpy.ops.object.material_slot_remove({'object': ob})for item in my_obj:#break# basefolder=os.path.join(os.path.expanduser('~'), 'Desktop', 'Urban_Enviroment_Texturing','Mesh_Texturing_Pipeline', 'Scenes', '005', 'images')basefolder = os.path.join('E:\\', 'chromeDownload', 'mvs_test', 'scenes', '006', 'images')t2 = time.time()for ob in bpy.context.selected_objects:ob.select_set(False)curv='Curve.'+itempath = bpy.data.objects[curv]camera.select_set(True)path.select_set(True)# bpy.context.view_layer.objects.active = path # parent# bpy.ops.object.parent_set(type='FOLLOW') # follow path# camera.location=path.matrix_world @ bpy.context.object.data.splines.active.bezier_points[0].co# target.location=path.matrix_world @ bpy.context.object.data.splines.active.bezier_points[1].co# direc=target.location-camera.locationframes=(int)(length()*multiply) # bpy.data.scenes["Scene"].frame_end=frames# bpy.context.object.data.path_duration=framesframe_is=0frames=frames+1print(frames)count=0for frame_is in range(scene.frame_start, scene.frame_end + 1):# for frame_is in range(frames - 3):t3 = time.time()scene.frame_current=frame_is#print(scene.frame_currents
# s=str(scene.objects['Camera'].matrix_world[0][3])+"_"+str(scene.objects['Camera'].matrix_world[1][3])+"_"+str(scene.objects['Camera'].matrix_world[2][3])+"_"
# s=s+str(direc[0])+"_"+str(direc[1])+"_"+str(direc[2])+".jpg"s = str(scene.frame_current).zfill(5)+".jpg"image_filepath=os.path.join(basefolder,s)#print(s)bpy.data.scenes['Scene'].render.filepath = image_filepath
# bpy.ops.render.render(write_still=True)elapsedTime = time.time() - t3print("Frame time passed {hours:d}:{minutes:d}:{seconds:d}".format(hours=int((elapsedTime / 60 ** 2) % (60 ** 2)), minutes=int((elapsedTime / 60) % (60)),seconds=int(elapsedTime % 60)))# print('path to create: ', os.path.join(os.path.expanduser('~'), 'Desktop', 'Data','Depth_data',scenenumber+'_'+item))if not os.path.exists(os.path.join(os.path.expanduser('~'), basefolder)):os.mkdir(os.path.join(os.path.expanduser('~'), basefolder))if not os.path.exists(os.path.join(os.path.expanduser('~'), basefolder, 'RTm/')):os.mkdir(os.path.join(os.path.expanduser('~'), basefolder, 'RTm/'))# Set up rendering of depth map:bpy.context.scene.use_nodes = Truetree = bpy.context.scene.node_treelinks = tree.links# clear default nodesfor n in tree.nodes:tree.nodes.remove(n)# create input render layer noderl = tree.nodes.new('CompositorNodeRLayers')RGB2BW = tree.nodes.new(type="CompositorNodeRGBToBW")links.new(rl.outputs[0], RGB2BW.inputs[0])map = tree.nodes.new(type="CompositorNodeMapValue")# Size is chosen kind of arbitrarily, try out until you're satisfied with resulting depth map.map.size = [0.05]map.use_min = Truemap.min = [0]map.use_max = Truemap.max = [1]links.new(rl.outputs[2], map.inputs[0])mix_multi = tree.nodes.new(type="CompositorNodeMixRGB")# Size is chosen kind of arbitrarily, try out until you're satisfied with resulting depth map.mix_multi.blend_type = 'MULTIPLY'mix_multi.inputs[2].default_value[0] = 0.5mix_multi.inputs[2].default_value[1] = 0.5mix_multi.inputs[2].default_value[2] = 0.5
# mix_multi.inputs[2].default = [0.5 , 0.5, 0.5, 1.0]links.new(rl.outputs[3], mix_multi.inputs[1])mix_multi2 = tree.nodes.new(type="CompositorNodeMixRGB")# Size is chosen kind of arbitrarily, try out until you're satisfied with resulting depth map.mix_multi2.blend_type = 'ADD'mix_multi2.inputs[2].default_value[0] = 0.5mix_multi2.inputs[2].default_value[1] = 0.5mix_multi2.inputs[2].default_value[2] = 0.5links.new(mix_multi.outputs[0], mix_multi2.inputs[1])invert = tree.nodes.new(type="CompositorNodeInvert")links.new(map.outputs[0], invert.inputs[1])# The viewer can come in handy for inspecting the results in the GUIdepthViewer = tree.nodes.new(type="CompositorNodeViewer")links.new(invert.outputs[0], depthViewer.inputs[0])# Use alpha from input.links.new(rl.outputs[1], depthViewer.inputs[1])# Normal map# The viewer can come in handy for inspecting the results in the GUIdepthViewer2 = tree.nodes.new(type="CompositorNodeViewer")links.new(rl.outputs[1], depthViewer2.inputs[1])links.new(mix_multi2.outputs[0], depthViewer2.inputs[0])# fileOutput = tree.nodes.new(type="CompositorNodeOutputFile")
# fileOutput.base_path = os.path.join(os.path.expanduser('~'), 'Desktop', 'Data','Depth_data',scenenumber+'_'+item, 'depth')
## fileOutput.file_slots[0].path = str(scene.frame_current).zfill(5)
# links.new(invert.outputs[0], fileOutput.inputs[0])
#
# fileOutput2 = tree.nodes.new(type="CompositorNodeOutputFile")
# fileOutput2.base_path = os.path.join(os.path.expanduser('~'), 'Desktop', 'Data','Depth_data',scenenumber+'_'+item,'normal')
## fileOutput2.file_slots[0].path = str(scene.frame_current).zfill(5)
# links.new(mix_multi2.outputs[0], fileOutput2.inputs[0])
#
# fileOutput3 = tree.nodes.new(type="CompositorNodeOutputFile")
# fileOutput3.base_path = os.path.join(os.path.expanduser('~'), 'Desktop', 'Data','Depth_data',scenenumber+'_'+item,'panoramas_BW')
## fileOutput3.file_slots[0].path = str(scene.frame_current).zfill(5)
# links.new(RGB2BW.outputs[0], fileOutput3.inputs[0])bpy.ops.render.render(write_still=True)location, rotation = scene.objects['Camera'].matrix_world.decompose()[0:2]R_world2bcam = rotation.to_matrix().transposed()T_world2bcam = -1*R_world2bcam @ locationCamera_RT_matrix = Matrix((R_world2bcam[0][:] + (T_world2bcam[0],),R_world2bcam[1][:] + (T_world2bcam[1],),R_world2bcam[2][:] + (T_world2bcam[2],),[0,0,0,1],))np.savetxt(os.path.join(os.path.expanduser('~'), basefolder, 'RTm')+'/'+str(frame_is).zfill(6)+"_RTm.txt",np.array(Camera_RT_matrix))# breakscene.frame_current=0path.select_set(False)bpy.ops.object.parent_clear(type='CLEAR')# camera.select_set(False)
elapsedTime = time.time() - t1
print("Total time passed {hours:d}:{minutes:d}:{seconds:d}".format(hours=int((elapsedTime / 60 ** 2) % (60 ** 2)), minutes=int((elapsedTime / 60) % (60)),seconds=int(elapsedTime % 60)))
print("Finished")
相关文章:
blender scripting 编写
blender scripting 编写 一、查看ui按钮对应的代码二、查看或修改对象名称三、案例:渲染多张图片并导出对应的相机参数 一、查看ui按钮对应的代码 二、查看或修改对象名称 三、案例:渲染多张图片并导出对应的相机参数 注:通过ui交互都设置好…...
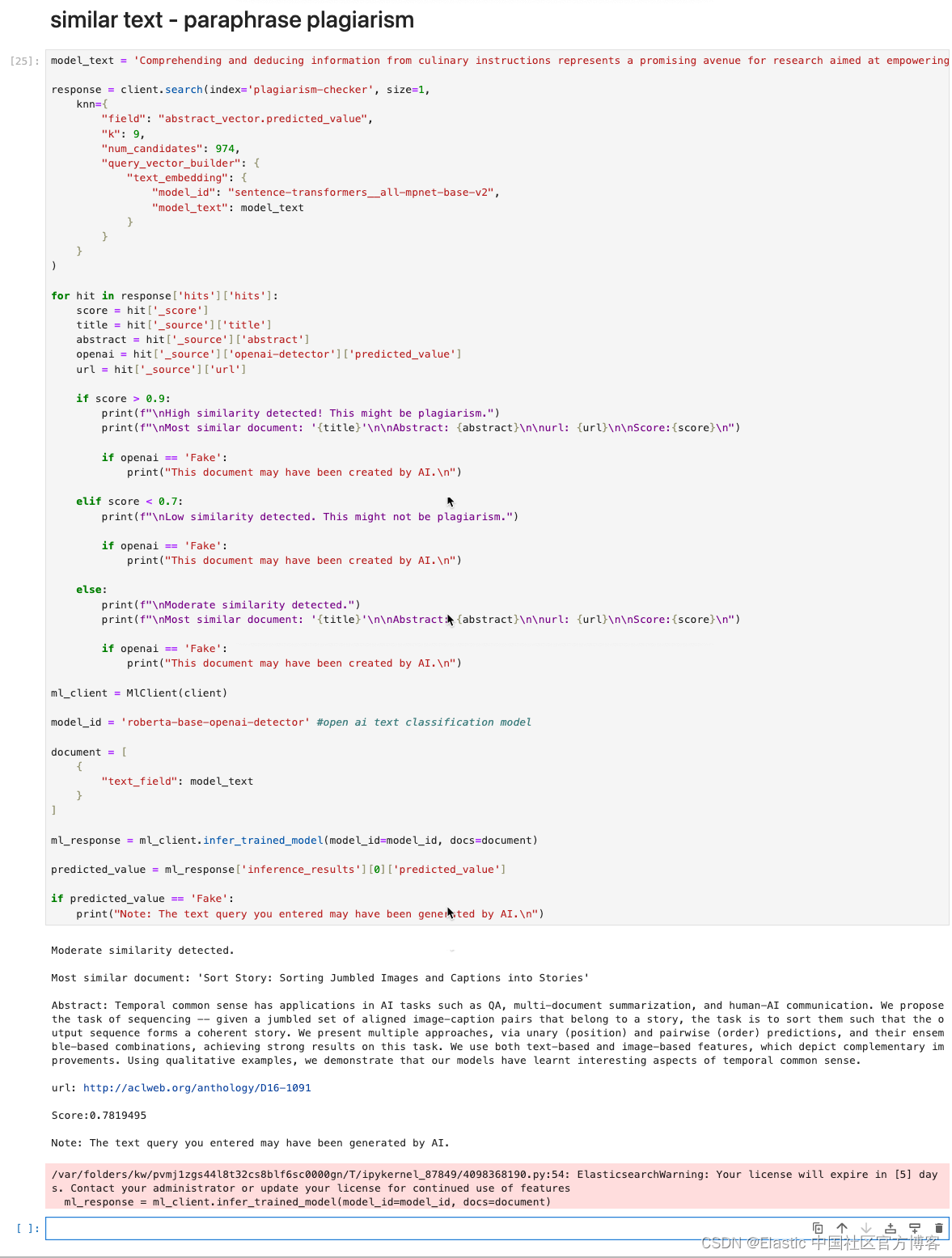
使用 Elasticsearch 检测抄袭 (二)
我在在之前的文章 “使用 Elasticsearch 检测抄袭 (一)” 介绍了如何检文章抄袭。这个在许多的实际使用中非常有意义。我在 CSDN 上的文章也经常被人引用或者抄袭。有的人甚至也不用指明出处。这对文章的作者来说是很不公平的。文章介绍的内容针对很多的…...

WPF DataGrid
文章目录 SelectionModeHeaderVisibilityBorderBrush SelectionMode DataGrid 控件的 SelectionMode 属性定义了用户可以如何选择 DataGrid 中的行。它是一个枚举类型的属性,有以下几个选项: Single(默认值):只能选择…...
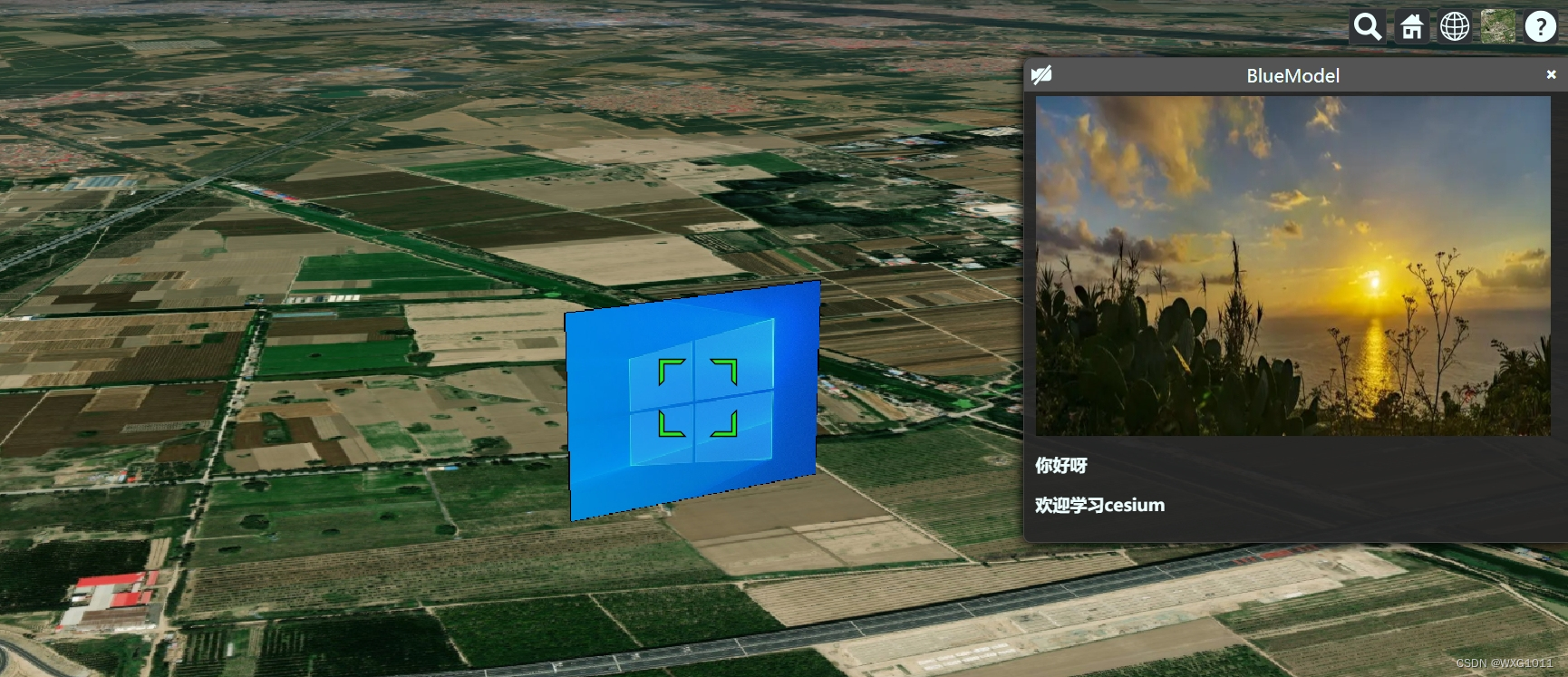
【cesium-5】鼠标交互与数据查询
scene.pick返回的是包含给定窗口位置基元的对象 scene.drillpack返回的是给定窗口位置所有对象的列表 Globe.pick返回的是给光线和地形的交点 Cesium.ScreenSpaceEventType.MIDDLE_CLICK 鼠标中间点击事件 Cesium.ScreenSpaceEventType.MOUSE_MOVE 鼠标移入事件 Cesium.ScreenS…...

Xcode 编译速度慢是什么原因?如何提高编译速度?
作为一个开发者,我们都希望能够高效地开发应用程序,而编译速度是影响开发效率的重要因素之一。然而,有时候我们会发现在使用 Xcode 进行开发时,译速度非常慢,这给我们带来了不少困扰。那么,为什么 Xcode 的…...

Best Arm Identification in Batched Multi-armed Bandit Problems
Q: 这篇论文试图解决什么问题? A: 这篇论文试图解决在批量多臂老虎机问题中进行最佳臂识别(BAI)的挑战,其中必须成批地对臂进行抽样,因为代理等待反馈的时间有限。这种场景出现在许多现实世界的应用中,例如…...

Unity编辑器紫色
紫色原因是因为编辑器内跑了其他平台的shader兼容性导致的,需要动态的去修改shader,主要用到Unity的api : Shader.Find(shaderName); 具体的工具代码如下: using System.Collections; using System.Collections.Generic; using UnityEngine…...
冒泡排序(C语言)
void BubbleSort(int arr[], int len) {int i, j, temp;for (i 0; i < len; i){for (j len - 1; j > i; j--){if (arr[j] > arr[j 1]){temp arr[j];arr[j] arr[j 1];arr[j 1] temp;}}} } 优化: 设置标志位flag,如果发生了交换flag设置…...
Unity中Shader观察空间推导(在Shader中实现)
文章目录 前言一、观察空间矩阵推导1、求观察空间基向量2、求观察空间的基向量在世界空间中的矩阵 的 逆矩阵2、求平移变换矩阵3、相乘得出 观察空间转化矩阵4、得到顶点的世界空间坐标,然后转化到观察空间5、把观察空间坐标转化为齐次裁剪坐标输出到屏幕 二、最终效…...

Hive04_DDL操作
Hive DDL操作 1 DDL 数据定义 1.1 创建数据库 CREATE DATABASE [IF NOT EXISTS] database_name [COMMENT database_comment] [LOCATION hdfs_path] [WITH DBPROPERTIES (property_nameproperty_value, ...)];[IF NOT EXISTS] :判断是否存在 [COMMENT database_c…...

odoo17核心概念view4——view.js
这是view系列的第四篇文章,专门介绍View组件。 作为一个Component,它总共包含js、css、xml三个标准文件,当然最重要的是view.js 首先在setup函数中对传入的参数props做了各种校验,然后扩展了subenv useSubEnv({keepLast: new Kee…...

Centos7 openSSL
阅读时长:10分钟 本文内容: 在阿里云Centos7上部署python3.10.6项目时遇到openSSL协议不支持,导致无法下载第三方包 本文目的: 通过手动编译,升级openssl版本centos7 重编译 python3.10.6github下载缓慢解决镜像源记录…...

Web 安全之文件下载漏洞详解
目录 引言 文件下载漏洞原理 文件下载漏洞的危害 文件下载漏洞类型 文件下载漏洞的利用方法 文件下载漏洞示例 文件下载漏洞的防护措施 漏洞检测与测试 小结 引言 在数字化时代,文件下载是网络应用程序的重要的功能之一,用户可以通过这一功能获…...
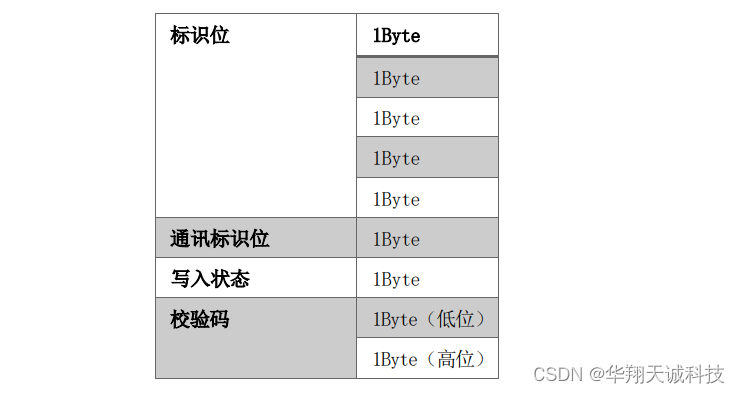
搬运机器人RFID传感器CNS-RFID-01|1S的RS485(MODBUS|HS协议)通讯连接方法
搬运机器人RFID传感器CNS-RFID-01|1S支持RS485通信,可支持RS485(MODBUS RTU)协议、RS485-HS协议,广泛应用于物流仓储,立库 AGV|无人叉车|搬送机器人等领域,常用定位、驻车等,本篇重点介绍CNS-RF…...

使用ZMQ.proxy实现ZMQ PUB消息转发
MQ.proxy 是 ZeroMQ 库中的一个功能,用于创建一个简单的代理服务器。它可以将消息从一个套接字传递到另一个套接字,实现消息的转发和路由。 要使用 ZMQ.proxy,需要按照以下步骤进行操作: 创建两个 ZMQ.Socket 对象:一个…...
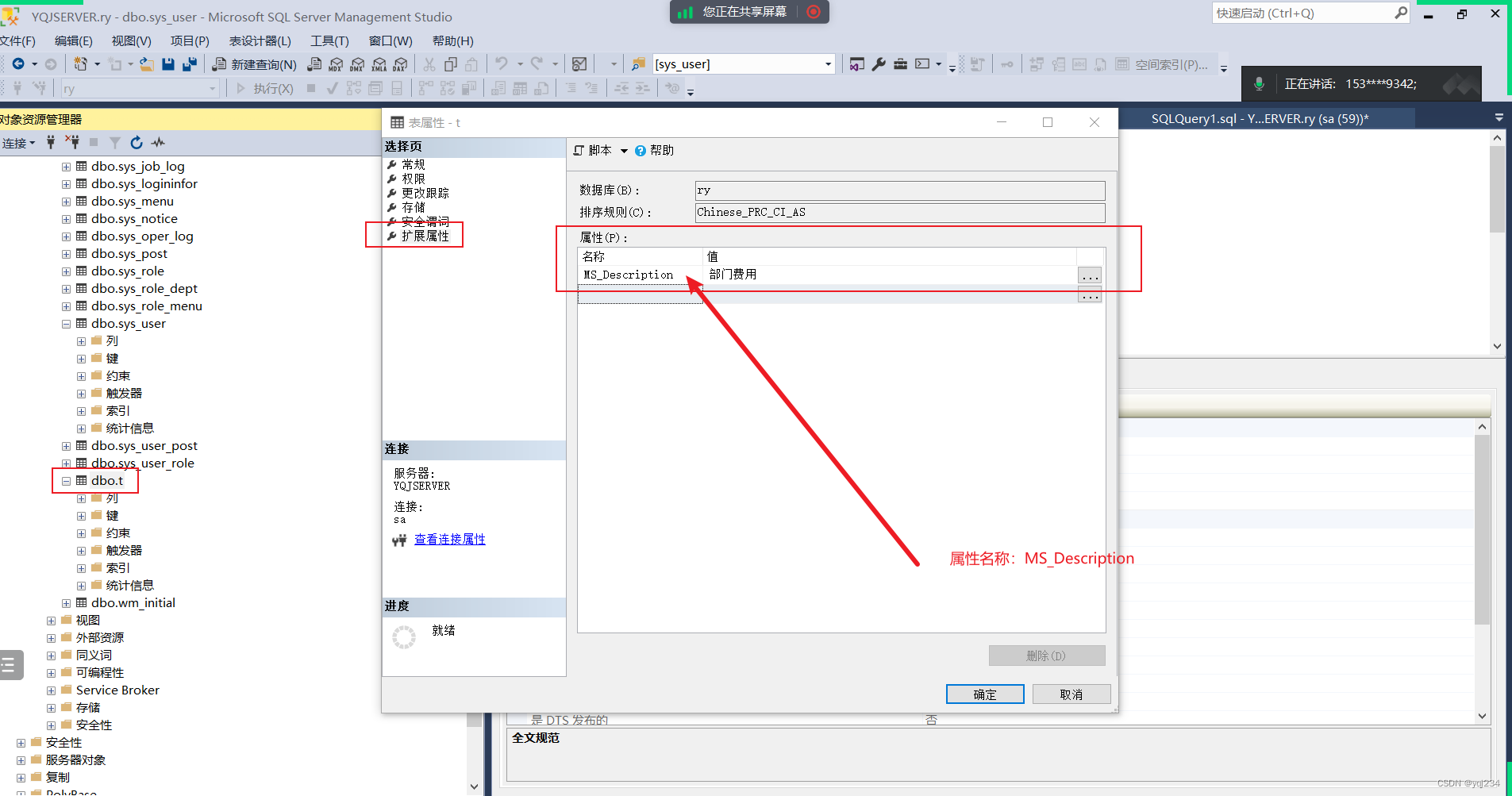
若依SQL Server开发使用教程
1. sys_menu表中的将菜单ID修改为自动ID,解决不能增加菜单的问题,操作流程如下: 解决方案如下 菜单栏->工具->选项 点击设计器,去掉阻止保存要求更新创建表的更改选项,点确认既可以保存了 2 自动生成代码找不表的解决方案…...

Mysql5.7服务器选项、系统变量和状态变量参考
官网地址:MySQL :: MySQL 5.7 Reference Manual :: 5.1.3 Server Option, System Variable, and Status Variable Reference 欢迎关注留言,我是收集整理小能手,工具翻译,仅供参考,笔芯笔芯. MySQL 5.7 参考手册 / ..…...

【Qt-Qss-Style】
Qt编程指南 ■ Qss■ Style■ setStyleSheet ■ style.qss■ border■ 去除弹框背景圆角■ QProgressBar样式表 ■ Qss Qt 支持很多种常见 符号 “>”代表直属子部件,说明两个控件之间是父子关系。 “#”代表后面的字段是前面控件类型的名称,当然也可…...

基于yolov8,制作停车位计数器(附源码)
大家好,YOLO(You Only Look Once) 是由Joseph Redmon和Ali开发的一种对象检测和图像分割模型。 YOLO的第一个版本于2015年发布,由于其高速度和准确性,瞬间得到了广大AI爱好者的喜爱。 Ultralytics YOLOv8则是一款前沿、最先进(SOTA)的模型&a…...
)
C++设计模式:单例模式(饿汉式、懒汉式)
单例模式是什么? 单例模式是一种创建型的软件设计模式。通过单例模式的设计,使得创建的类在当前进程中只有唯一一个实例,并提供一个全局性的访问点,这样可以规避因频繁创建对象而导致的内存飙升情况。 单例模式有三个要点 私有化…...

KubeSphere 容器平台高可用:环境搭建与可视化操作指南
Linux_k8s篇 欢迎来到Linux的世界,看笔记好好学多敲多打,每个人都是大神! 题目:KubeSphere 容器平台高可用:环境搭建与可视化操作指南 版本号: 1.0,0 作者: 老王要学习 日期: 2025.06.05 适用环境: Ubuntu22 文档说…...
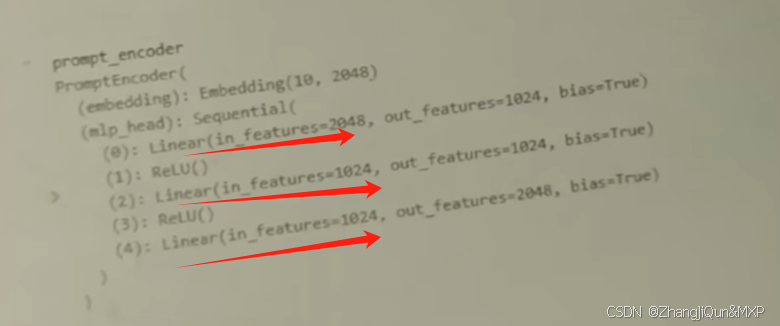
Prompt Tuning、P-Tuning、Prefix Tuning的区别
一、Prompt Tuning、P-Tuning、Prefix Tuning的区别 1. Prompt Tuning(提示调优) 核心思想:固定预训练模型参数,仅学习额外的连续提示向量(通常是嵌入层的一部分)。实现方式:在输入文本前添加可训练的连续向量(软提示),模型只更新这些提示参数。优势:参数量少(仅提…...

DockerHub与私有镜像仓库在容器化中的应用与管理
哈喽,大家好,我是左手python! Docker Hub的应用与管理 Docker Hub的基本概念与使用方法 Docker Hub是Docker官方提供的一个公共镜像仓库,用户可以在其中找到各种操作系统、软件和应用的镜像。开发者可以通过Docker Hub轻松获取所…...

mongodb源码分析session执行handleRequest命令find过程
mongo/transport/service_state_machine.cpp已经分析startSession创建ASIOSession过程,并且验证connection是否超过限制ASIOSession和connection是循环接受客户端命令,把数据流转换成Message,状态转变流程是:State::Created 》 St…...

基于当前项目通过npm包形式暴露公共组件
1.package.sjon文件配置 其中xh-flowable就是暴露出去的npm包名 2.创建tpyes文件夹,并新增内容 3.创建package文件夹...
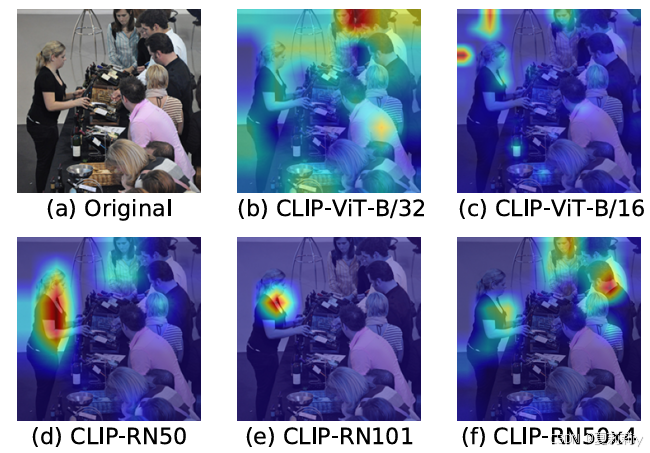
[ICLR 2022]How Much Can CLIP Benefit Vision-and-Language Tasks?
论文网址:pdf 英文是纯手打的!论文原文的summarizing and paraphrasing。可能会出现难以避免的拼写错误和语法错误,若有发现欢迎评论指正!文章偏向于笔记,谨慎食用 目录 1. 心得 2. 论文逐段精读 2.1. Abstract 2…...
剑指offer20_链表中环的入口节点
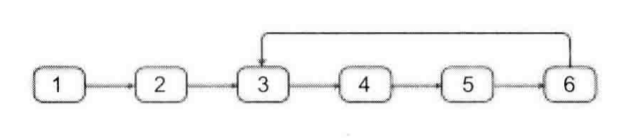
链表中环的入口节点 给定一个链表,若其中包含环,则输出环的入口节点。 若其中不包含环,则输出null。 数据范围 节点 val 值取值范围 [ 1 , 1000 ] [1,1000] [1,1000]。 节点 val 值各不相同。 链表长度 [ 0 , 500 ] [0,500] [0,500]。 …...
指令的指南)
在Ubuntu中设置开机自动运行(sudo)指令的指南
在Ubuntu系统中,有时需要在系统启动时自动执行某些命令,特别是需要 sudo权限的指令。为了实现这一功能,可以使用多种方法,包括编写Systemd服务、配置 rc.local文件或使用 cron任务计划。本文将详细介绍这些方法,并提供…...
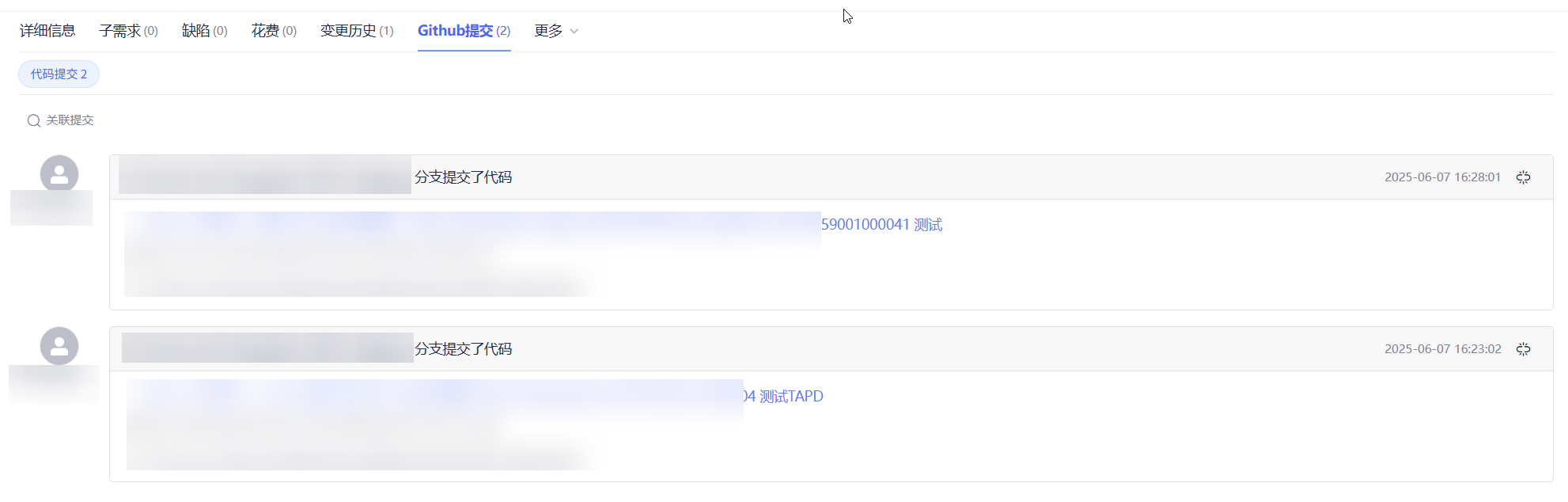
基于 TAPD 进行项目管理
起因 自己写了个小工具,仓库用的Github。之前在用markdown进行需求管理,现在随着功能的增加,感觉有点难以管理了,所以用TAPD这个工具进行需求、Bug管理。 操作流程 注册 TAPD,需要提供一个企业名新建一个项目&#…...
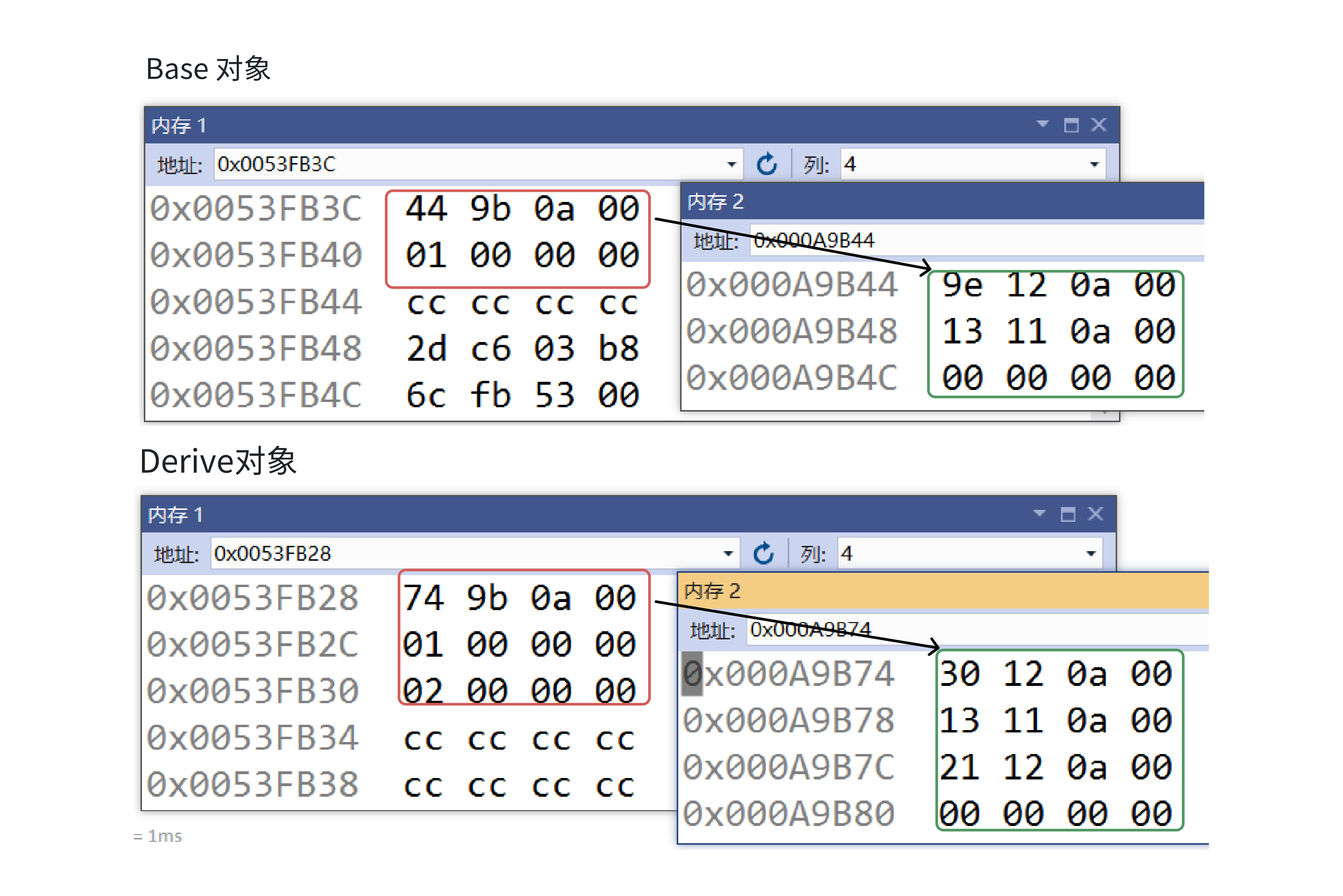
C++:多态机制详解
目录 一. 多态的概念 1.静态多态(编译时多态) 二.动态多态的定义及实现 1.多态的构成条件 2.虚函数 3.虚函数的重写/覆盖 4.虚函数重写的一些其他问题 1).协变 2).析构函数的重写 5.override 和 final关键字 1&#…...