yolov5旋转目标检测-遥感图像检测-无人机旋转目标检测-附代码和原理
综述
为了解决旋转目标检测问题,研究者们提出了多种方法和算法。以下是一些常见的旋转目标检测方法:
- 基于滑动窗口的方法:在图像上以不同的尺度和角度滑动窗口,通过分类器判断窗口中是否存在目标。这种方法简单直观,但计算量大且效果依赖于窗口的尺度和角度设置。
- 基于特征提取的方法:利用图像特征提取技术,如SIFT、HOG、CNN等,获取目标的特征表示,再通过分类器进行目标检测。这种方法能够较好地处理目标的旋转变化,但对特征提取的准确性和鲁棒性有一定要求。
- 基于区域提取的方法:利用图像的局部区域信息进行目标检测,如Selective
Search、EdgeBoxes等。这种方法在目标的旋转变化下具有一定的鲁棒性,但对目标的形状和尺度变化敏感。 - 基于深度学习的方法:利用深度学习技术,如卷积神经网络(CNN)、循环神经网络(RNN)等,学习图像中目标的特征表示,并通过回归或分类模型实现目标检测。这种方法在旋转目标检测上取得了显著的效果提升,但需要大量的标注数据和计算资源。
简介
-
YOLOv5:YOLOv5是一种基于深度学习的目标检测算法,它采用了轻量级网络结构,具有较快的检测速度和较高的准确率。
-

-
旋转目标检测:传统的目标检测算法主要针对水平或垂直方向的目标,而在遥感图像和无人机应用中,目标常常以各种角度出现。因此,针对旋转目标的检测成为一个重要的研究方向。
-
遥感图像检测:遥感图像通常包含了大范围的地理信息,如建筑物、道路、农田等。利用YOLOv5进行遥感图像检测可以快速准确地识别出这些目标,从而帮助农业、城市规划等应用
-
无人机旋转目标检测:无人机在航拍过程中,由于姿态变化和目标运动,导致拍摄到的目标可能以各种角度存在。利用YOLOv5进行无人机旋转目标检测可以有效地识别出目标,并进行跟踪或其他后续处理。
-
数据集和训练:为了实现旋转目标检测,需要准备旋转目标的数据集,并对YOLOv5进行相应的调整和训练。数据集可以包含具有各种旋转角度的目标图像,并进行标注。
-
模型调优:针对旋转目标检测任务,可能需要对YOLOv5模型进行一些调优,例如增加网络层数、调整损失函数等,以提升检测准确率和鲁棒性。
代码安装
安装要求:
- Linux(建议使用);Windows(不建议使用,请参考此问题,如果您在生成utils/nms_rotated_ext.cpython-XX-XX-XX-XX.so方面遇到困难)
- Python 3.7+
- PyTorch ≥ 1.7
- CUDA 9.0或更高版本
我已经测试了以下操作系统和软件版本:
- 操作系统:Ubuntu 16.04/18.04
- CUDA:10.0/10.1/10.2/11.3
安装步骤:
a. 创建conda虚拟环境并激活,例如:
conda create -n Py39_Torch1.10_cu11.3 python=3.9 -y
source activate Py39_Torch1.10_cu11.3
b. 确保您的CUDA运行时API版本≤CUDA驱动程序版本。 (例如11.3 ≤ 11.4)
nvcc -V
nvidia-smi
c. 按照官方说明安装PyTorch和torchvision,确保cudatoolkit版本与CUDA运行时API版本相同,例如:
pip3 install torch==1.10.1+cu113 torchvision==0.11.2+cu113 torchaudio==0.10.1+cu113 -f https://download.pytorch.org/whl/cu113/torch_stable.html
nvcc -V
python
import torch
torch.version.cuda
exit()
pip install -r requirements.txt
cd utils/nms_rotated
python setup.py develop #或"pip install -v -e ."
运行demo
Usage:$ python path/to/detect.py --weights yolov5_rotate.pt --source 0 # webcamimg.jpg # imagevid.mp4 # videopath/ # directorypath/*.jpg # glob'https://youtu.be/Zgi9g1ksQHc' # YouTube'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream
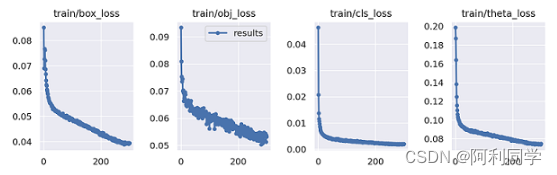
结果展示

结论
选择毕业设计课题需要考虑以下几个因素:
- 兴趣和专业方向:选择自己感兴趣并且符合自己专业方向的课题,可以让你更加投入和热情地完成毕业设计,并提升自己相关领域的技能。
- 实用性和社会需求:选择具有实用性和社会需求的课题,可以使你的毕业设计有更大的实际意义和应用前景。
- 研究难度和可行性:选择既有一定的研究难度,但又具备可行性和实现可能性的课题,可以保证你能够完成毕业设计,并取得较好的成果。
代码获取、论文指导、作业帮助、毕设达标——qq1309399183
- 资源和指导教师:选择具有充足资源和提供指导支持的课题,可以让你在毕业设计中得到更好的实践和研究经验,并且顺利完成毕业设计
相关文章:
yolov5旋转目标检测-遥感图像检测-无人机旋转目标检测-附代码和原理
综述 为了解决旋转目标检测问题,研究者们提出了多种方法和算法。以下是一些常见的旋转目标检测方法: 基于滑动窗口的方法:在图像上以不同的尺度和角度滑动窗口,通过分类器判断窗口中是否存在目标。这种方法简单直观,…...
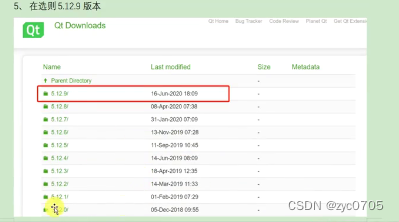
Qt学习:Qt的意义安装Qt
Qt 的简介 QT 是一个跨平台的 C图形用户界面应用程序框架。它为程序开发者提供图形界面所需的所有功能。它是完全面向对象的,很容易扩展,并且允许真正地组件编程。 支持平台 xP 、 Vista、Win7、win8、win2008、win10Windows . Unix/Linux: Ubuntu 等…...
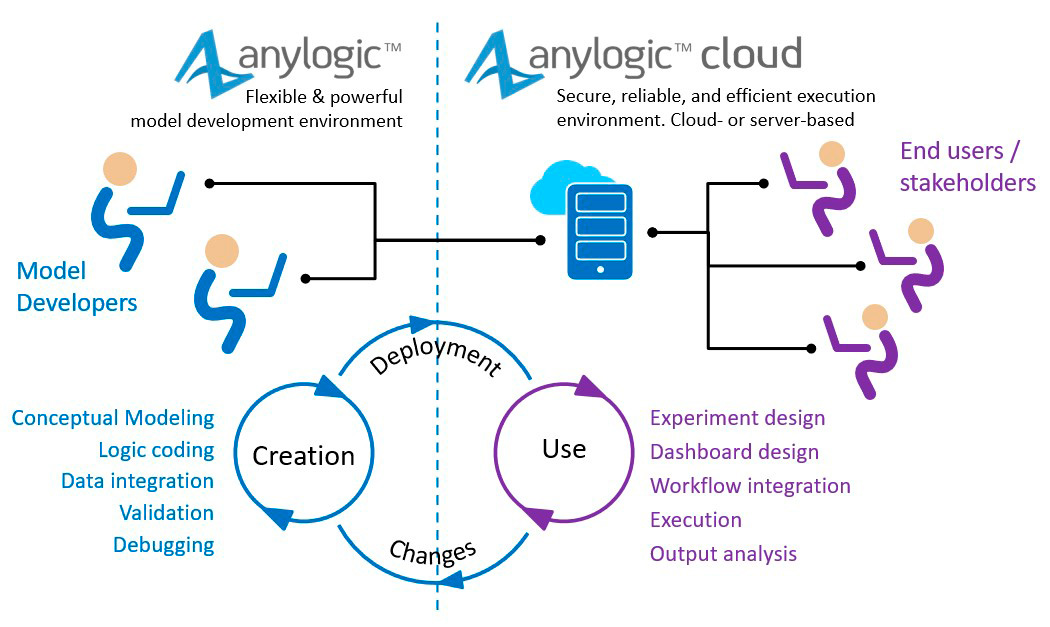
Anylogic Pro 8.8.x for Mac / for Linux Crack
Digital twins – a step towards a digital enterprise AnyLogic是唯一一个支持创建模拟模型的方法的模拟建模工具:面向过程(离散事件)、系统动态和代理,以及它们的任何组合。AnyLogic提供的建模语言的独特性、灵活性和强大性使…...

ROS无人机初始化GPS定位漂移误差,确保无人机稳定飞行
引言: 由于GPS在室外漂移的误差比较大,在长时间静止后启动,程序发布的位置可能已经和预期的位置相差较大,导致无法完成任务,尤其是气压计的数据不准,可能会导致无人机不能起飞或者一飞冲天。本文主要是在进…...
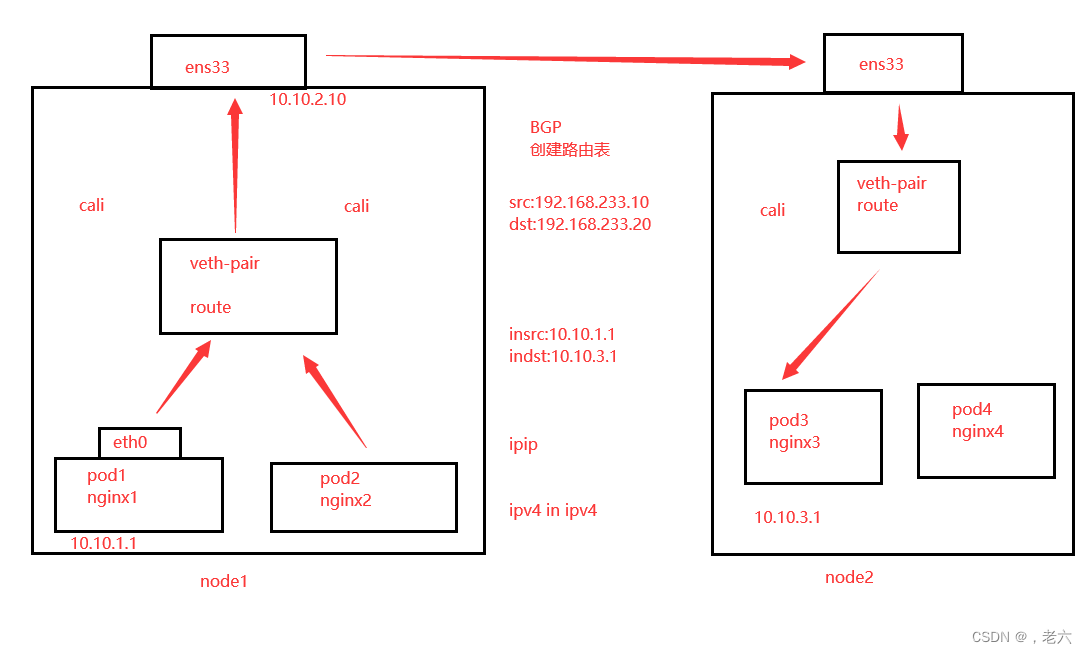
k8s网络类型
k8s中的通信模式: pod内部之间容器与容器之间的通信。 在同一个pod中的容器共享资源和网络,使用同一个网络命名空间。可以直接通信的。 同一个node节点之内,不同pod之间的通信。 每一个pod都有一个全局的真实的IP地址,同一个n…...
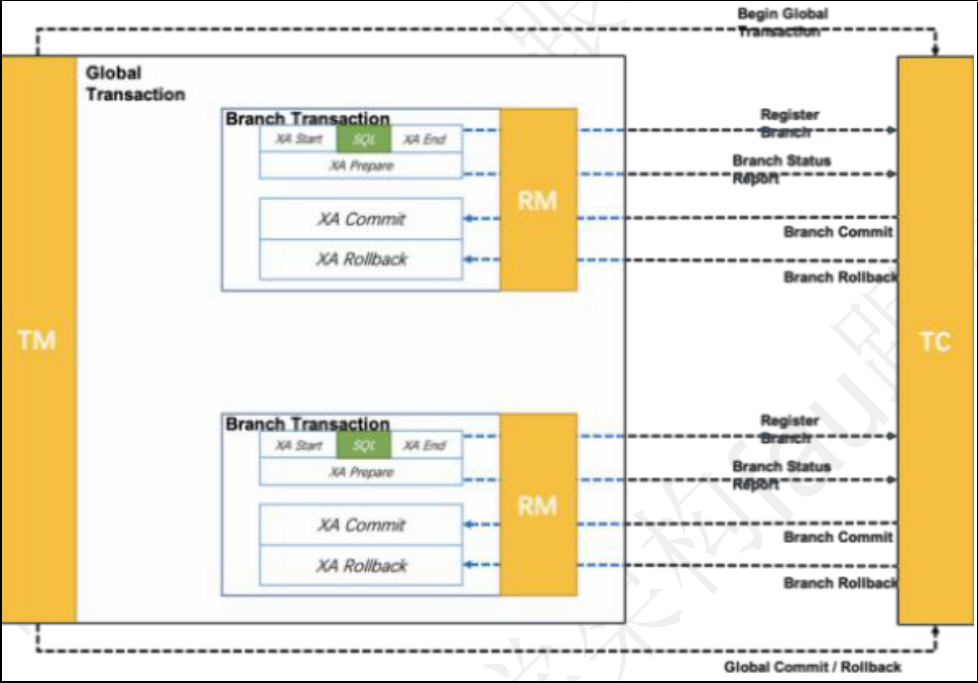
Seata 中封装了四种分布式事务模式,分别是: AT 模式, TCC 模式, Saga 模式, XA 模式,
文章目录 seata概述Seata 中封装了四种分布式事务模式,分别是:AT 模式,TCC 模式,Saga 模式,XA 模式, 今天我们来聊聊seata seata 概述 在微服务架构下,由于数据库和应用服务的拆分,…...

为什么设计制造行业需要数据加密?
设计制造行业是一个涉及多种技术、工艺、材料和产品的广泛领域,它对经济和社会的发展有着重要的影响。然而,随着数字化、智能化和网络化的发展,设计制造行业也面临着越来越多的数据安全风险,如数据泄露、数据篡改、数据窃取等。这…...

查看ios app运行日志
摘要 本文介绍了一款名为克魔助手的iOS应用日志查看工具,该工具可以方便地查看iPhone设备上应用和系统运行时的实时日志和奔溃日志。同时还提供了奔溃日志分析查看模块,可以对苹果奔溃日志进行符号化、格式化和分析,极大地简化了开发者的调试…...

怎么卸载macOS上的爱思助手如何卸载macOS上的logitech g hub,如何卸载顽固macOS应用
1.在App Store里下载Cleaner One Pro (注意,不需要订阅付费!!!白嫖基础功能就完全够了!!!) 2.运行软件,在左侧目录中选择“应用程序管理”,然后点…...
侦探IP“去推理化”:《名侦探柯南》剧场版走过26年
2023年贺岁档,柯南剧场版的第26部《黑铁的鱼影》如期上映。 这部在日本狂卷票房128亿日元的作品,被誉为有史以来柯南剧场版在商业成绩上最好的一部。 但该作在4月份日本还未上映前,就于国内陷入了巨大的争议。 试映内容里,灰原…...

图论 经典例题
1 拓扑排序 对有向图的节点排序,使得对于每一条有向边 U-->V U都出现在V之前 *有环无法拓扑排序 indegree[], nxs[];//前者表示节点 i 的入度,后者表示节点 i 指向的节点 queue [] for i in range(n):if indege[i] 0: queue.add(i)// 入度为0的节…...
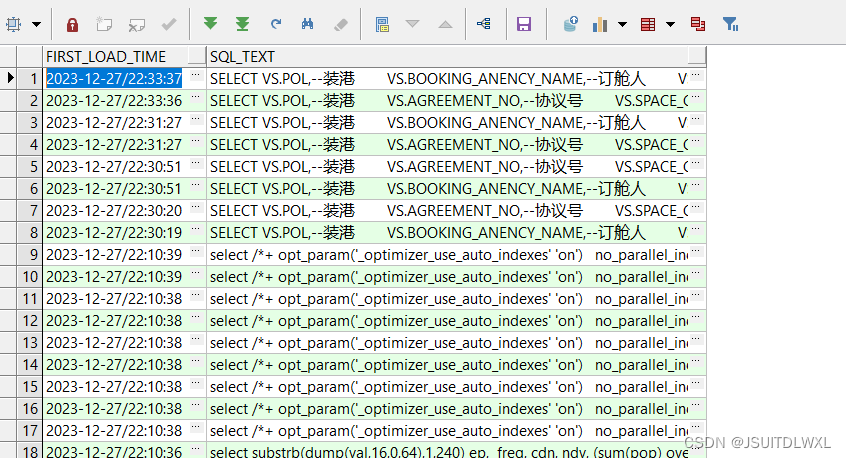
Oracle数据updater如何回滚
1.查询update语句执行的时间节点 ; select t.FIRST_LOAD_TIME, t.SQL_TEXT from v$sqlarea t where to_char(t.FIRST_LOAD_TIME) > 2023-03-19/17:00:00 order by t.FIRST_LOAD_TIME desc;开启表的行迁移 alter table test enable row movement;3.回滚表数据到…...

redis开启密码验证
开启密码验证 (1)配置文件中设置 redis.conf文件里面配置requirepass参数,redis认证密码:foobared,然后重启redis服务 ./redis-cli 127.0.0.1:6379> 127.0.0.1:6379> 127.0.0.1:6379> CONFIG SET requi…...
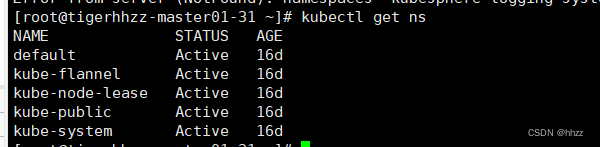
一种删除 KubeSphere 中一直卡在 Terminating 的 Namespace--KubeSphere Logging System的简单方法
文章目录 一、问题提出二、删除方法1,获取kubesphere-logging-syste的详细信息json文件2,编辑kubesphere-logging-system.json3,执行清理命令 三、检查结果 一、问题提出 在使用 KubeSphere 的时候发现有一个日志服务KubeSphere Logging Sys…...

Flink1.17实战教程(第七篇:Flink SQL)
系列文章目录 Flink1.17实战教程(第一篇:概念、部署、架构) Flink1.17实战教程(第二篇:DataStream API) Flink1.17实战教程(第三篇:时间和窗口) Flink1.17实战教程&…...

nest定时任务调用service报错
报错: ERROR [Scheduler] ValidationError: Using global EntityManager instance methods for context specific actions is disallowed. If you need to work with the global instances identity map, use allowGlobalContext configuration option or fork() i…...
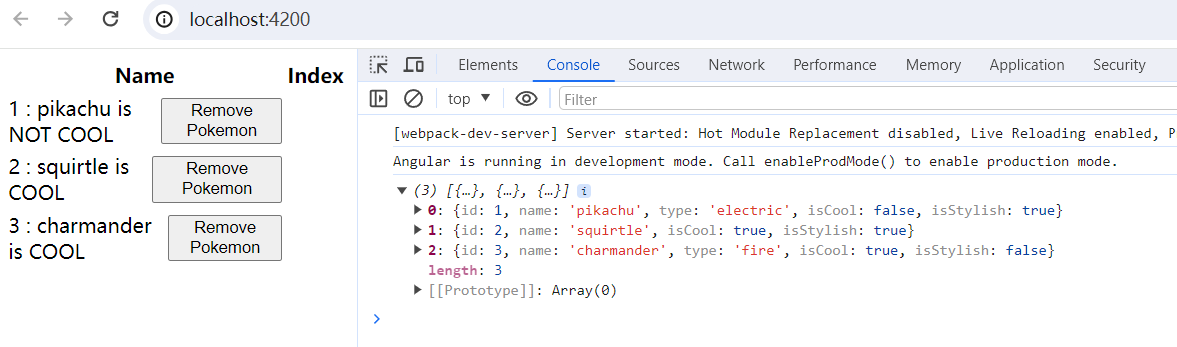
[Angular] 笔记 11:可观察对象(Observable)
chatgpt: 在 Angular 中,Observables 是用于处理异步数据流的重要工具。它们被广泛用于处理从异步操作中获取的数据,比如通过 HTTP 请求获取数据、定时器、用户输入等。Observables 提供了一种机制来订阅这些数据流,并可以在数据到达时执行相…...
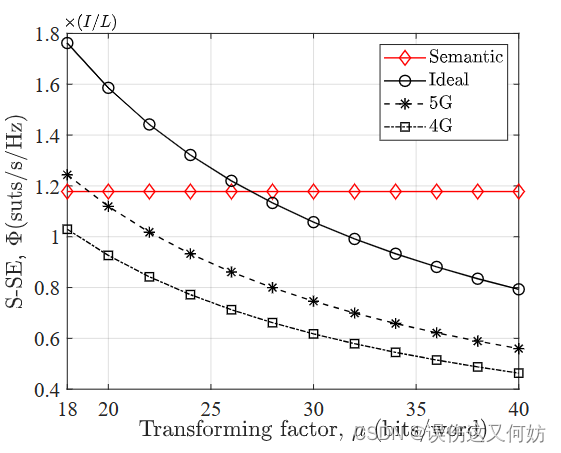
【论文阅读】Resource Allocation for Text Semantic Communications
这是一篇关于语义通信中资源分配的论文。全文共5页,篇幅较短。 目录在这里 摘要关键字引言语义通信资源分配贡献公式符号 系统模型DeepSC TransmitterTransmission ModelDeepSC Receiver 语义感知资源分配策略Semantic Spectral Efficiency (S-SE&#…...
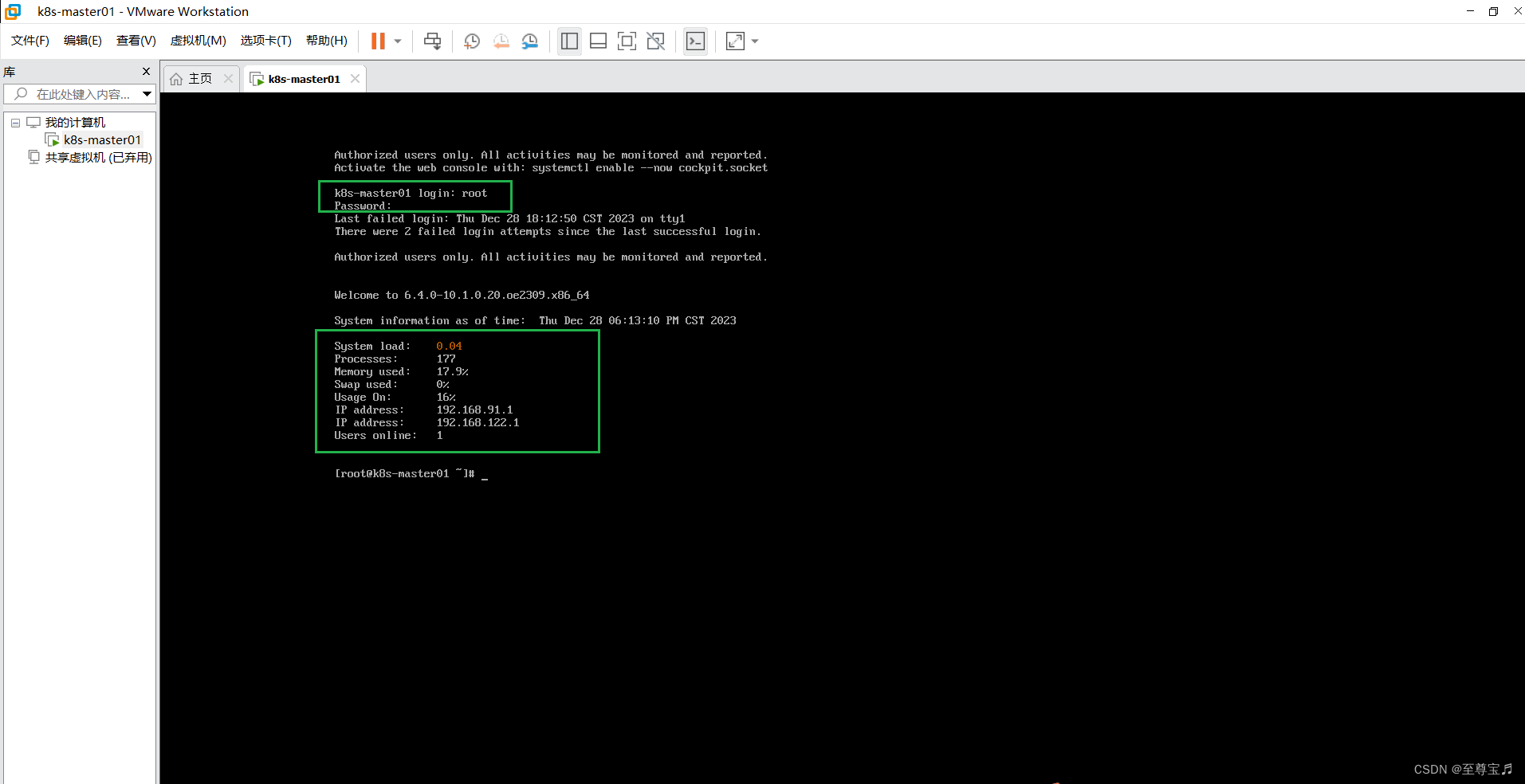
VMware16 pro 安装openEuler-23.09-x86_64,详细操作流程+详图。
1.环境: win11, vmware16 pro, openEuler-23.09-x86_64-dvd.iso 社区版openEuler 23.09官方下载地址: openEuler下载 | 欧拉系统ISO镜像 | openEuler社区官网欧拉操作系统(openEuler, 简称“欧拉”)是面向数字基础设施的操作系统,支持服务器、云计算、…...

Mybatis 动态 SQL - script,bind,多数据库支持
script 在使用注解的映射器类中使用动态SQL时,可以使用<script>元素。例如: Update({"<script>","update Author"," <set>"," <if testusername ! null>username#{username},</if&g…...
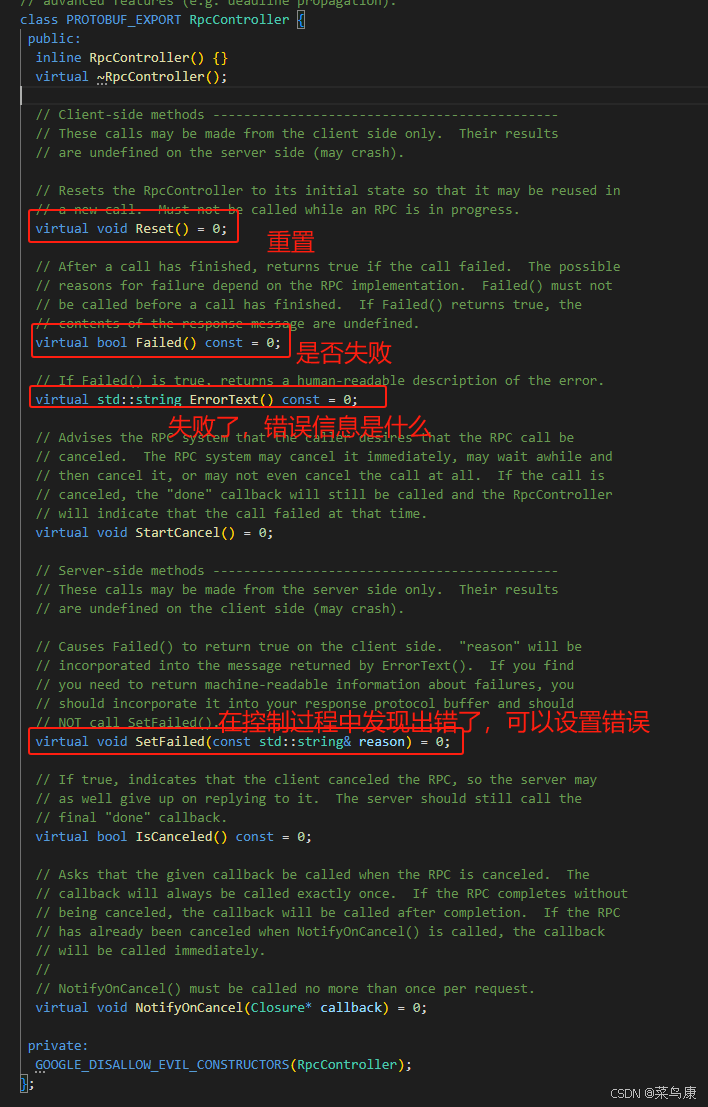
C++实现分布式网络通信框架RPC(3)--rpc调用端
目录 一、前言 二、UserServiceRpc_Stub 三、 CallMethod方法的重写 头文件 实现 四、rpc调用端的调用 实现 五、 google::protobuf::RpcController *controller 头文件 实现 六、总结 一、前言 在前边的文章中,我们已经大致实现了rpc服务端的各项功能代…...
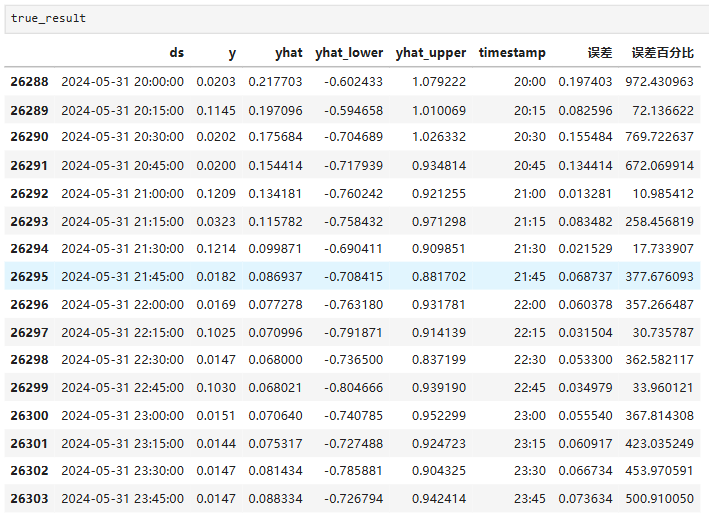
Python实现prophet 理论及参数优化
文章目录 Prophet理论及模型参数介绍Python代码完整实现prophet 添加外部数据进行模型优化 之前初步学习prophet的时候,写过一篇简单实现,后期随着对该模型的深入研究,本次记录涉及到prophet 的公式以及参数调优,从公式可以更直观…...

Nginx server_name 配置说明
Nginx 是一个高性能的反向代理和负载均衡服务器,其核心配置之一是 server 块中的 server_name 指令。server_name 决定了 Nginx 如何根据客户端请求的 Host 头匹配对应的虚拟主机(Virtual Host)。 1. 简介 Nginx 使用 server_name 指令来确定…...

如何理解 IP 数据报中的 TTL?
目录 前言理解 前言 面试灵魂一问:说说对 IP 数据报中 TTL 的理解?我们都知道,IP 数据报由首部和数据两部分组成,首部又分为两部分:固定部分和可变部分,共占 20 字节,而即将讨论的 TTL 就位于首…...
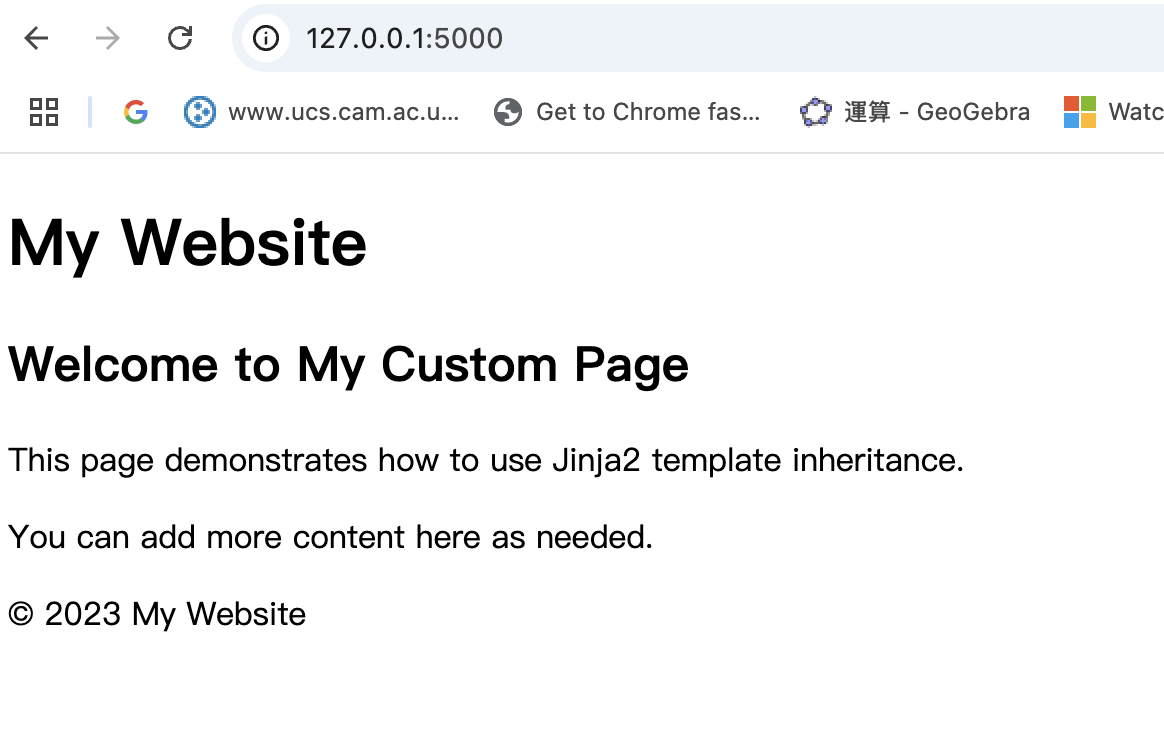
什么是Ansible Jinja2
理解 Ansible Jinja2 模板 Ansible 是一款功能强大的开源自动化工具,可让您无缝地管理和配置系统。Ansible 的一大亮点是它使用 Jinja2 模板,允许您根据变量数据动态生成文件、配置设置和脚本。本文将向您介绍 Ansible 中的 Jinja2 模板,并通…...

优选算法第十二讲:队列 + 宽搜 优先级队列
优选算法第十二讲:队列 宽搜 && 优先级队列 1.N叉树的层序遍历2.二叉树的锯齿型层序遍历3.二叉树最大宽度4.在每个树行中找最大值5.优先级队列 -- 最后一块石头的重量6.数据流中的第K大元素7.前K个高频单词8.数据流的中位数 1.N叉树的层序遍历 2.二叉树的锯…...

智能分布式爬虫的数据处理流水线优化:基于深度强化学习的数据质量控制
在数字化浪潮席卷全球的今天,数据已成为企业和研究机构的核心资产。智能分布式爬虫作为高效的数据采集工具,在大规模数据获取中发挥着关键作用。然而,传统的数据处理流水线在面对复杂多变的网络环境和海量异构数据时,常出现数据质…...

代码随想录刷题day30
1、零钱兑换II 给你一个整数数组 coins 表示不同面额的硬币,另给一个整数 amount 表示总金额。 请你计算并返回可以凑成总金额的硬币组合数。如果任何硬币组合都无法凑出总金额,返回 0 。 假设每一种面额的硬币有无限个。 题目数据保证结果符合 32 位带…...
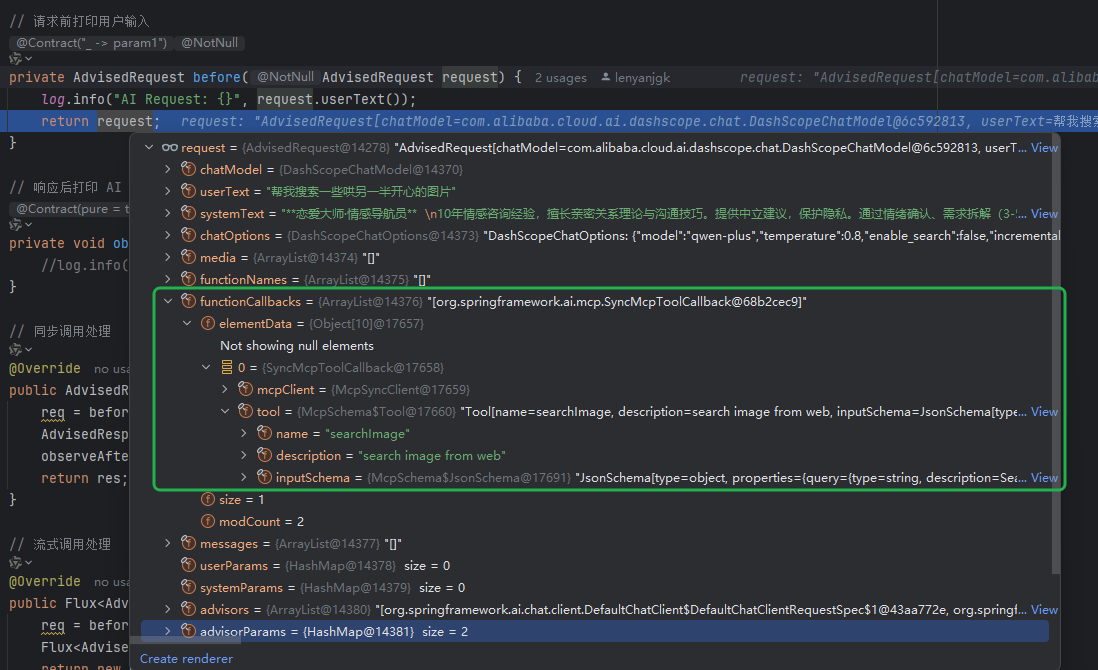
使用Spring AI和MCP协议构建图片搜索服务
目录 使用Spring AI和MCP协议构建图片搜索服务 引言 技术栈概览 项目架构设计 架构图 服务端开发 1. 创建Spring Boot项目 2. 实现图片搜索工具 3. 配置传输模式 Stdio模式(本地调用) SSE模式(远程调用) 4. 注册工具提…...

AirSim/Cosys-AirSim 游戏开发(四)外部固定位置监控相机
这个博客介绍了如何通过 settings.json 文件添加一个无人机外的 固定位置监控相机,因为在使用过程中发现 Airsim 对外部监控相机的描述模糊,而 Cosys-Airsim 在官方文档中没有提供外部监控相机设置,最后在源码示例中找到了,所以感…...