ROS TF坐标变换 - 静态坐标变换
目录
- 一、静态坐标变换(C++实现)
- 二、静态坐标变换(Python实现)
如前文所属,ROS通过广播的形式告知各模块的位姿关系,接下来详述这一机制的代码实现。
模块间的位置关系有两种类型,一种是相对固定的,称为静态坐标变换,一种是相对不固定,变化的,称为动态坐标变换。
一、静态坐标变换(C++实现)
所谓静态坐标变换,是指两个坐标系之间的相对位置是固定的。比如机器人底盘上安装了一个激光雷达,他和底盘组成一个刚体,它们的相对位姿不会随机器人的运动而变化,他们之间的坐标变换即属于静态坐标变换。
假设激光雷达相对与底盘的欧拉位姿为(0.5, 0.0, 0.3; 0.0, 0.0, 0.0)
雷达检测到的障碍物位置为(2.0, 2.5, 0.3)
若要计算障碍物和底盘的相对位置,就可以通过雷达到底盘的坐标变换来计算,步骤如下:
- 雷达(laser)发布自己和底盘(base_link)的相对静态坐标
- 避障模块监听雷达(laser)和底盘(base_link)的相对坐标关系,并通过
tf计算障碍物位置。
首先创建 tf2_learning 包,命令如下:(这一步不是必须,这里只是为了方便清晰的说明,也可以使用已有的包,在包里新增节点等方法)
catkin_creat_pkg tf2_learning roscpp rospy geometry_msgs std_msgs tf2 tf2_geometry_msgs tf2_ros
创建后,文件结构如下:

在创建的 tf2_learning 包路径下有一个 src 目录,在这里存储C++源码,我们创建 static_frame_broadcast.cpp 和 static_frame_listen.cpp ,修改 CMakeLists.txt ,添加如下内容:
add_executable(${PROJECT_NAME}_broadcast src/static_frame_broadcast.cpp)
add_executable(${PROJECT_NAME}_listen src/static_frame_listen.cpp)target_link_libraries(${PROJECT_NAME}_broadcast${catkin_LIBRARIES}
)target_link_libraries(${PROJECT_NAME}_listen${catkin_LIBRARIES}
)
static_frame_broadcast.cpp 实现广播子坐标系相对于父坐标系的静态坐标,内容如下:
#include "ros/ros.h"
#include "tf2_ros/static_transform_broadcaster.h"
#include "geometry_msgs/TransformStamped.h"
#include "tf2/LinearMath/Quaternion.h"int main(int argc, char **argv)
{// 初始化 ROS 节点ros::init(argc, argv, "static_frame_broadcast");// 创建静态坐标转换广播器tf2_ros::StaticTransformBroadcaster broadcaster;// 创建坐标系信息geometry_msgs::TransformStamped ts;// --设置头信息ts.header.seq = 100;ts.header.stamp = ros::Time::now();ts.header.frame_id = "base_link";// --设置子级坐标系ts.child_frame_id = "laser";// --设置子坐标系相对于父坐标系的平移偏移量ts.transform.translation.x = 0.5;ts.transform.translation.y = 0.0;ts.transform.translation.z = 0.3;// --设置子坐标系相对于父坐标系的旋转偏移量// --将欧拉角转换成四元数tf2::Quaternion qtn; // tf2的四元数类qtn.setRPY(0, 0, 0); // 设置欧拉角// 获取旋转的四元数值ts.transform.rotation.x = qtn.getX();ts.transform.rotation.y = qtn.getY();ts.transform.rotation.z = qtn.getZ();ts.transform.rotation.w = qtn.getW();// 广播器发布坐标系信息broadcaster.sendTransform(ts);ros::spin();return 0;
}
static_frame_listen.cpp 实现订阅静态坐标转换关系,并利用该关系将雷达坐标系的点转换到 base_link 坐标系,内容如下:
#include "ros/ros.h"
#include "tf2_ros/transform_listener.h"
#include "tf2_ros/buffer.h"
#include "geometry_msgs/PointStamped.h"
#include "tf2_geometry_msgs/tf2_geometry_msgs.h"int main(int argc, char *argv[])
{// 初始化 ROS 节点ros::init(argc, argv, "static_frame_listen");ros::NodeHandle nh;// 创建 TF 订阅节点tf2_ros::Buffer buffer;tf2_ros::TransformListener listener(buffer);ros::Rate rate(1);while (ros::ok()){// 生成一个坐标点, 模拟雷达检测到的障碍物坐标点(雷达坐标系下的坐标)geometry_msgs::PointStamped point_laser;point_laser.header.frame_id = "laser";point_laser.header.stamp = ros::Time::now();point_laser.point.x = 2.0;point_laser.point.y = 2.5;point_laser.point.z = 0.3;// 转换坐标点, 计算障碍物坐标点在 base_link 下的坐标try{geometry_msgs::PointStamped point_base;point_base = buffer.transform(point_laser, "base_link");ROS_INFO("point_base: (%.2f, %.2f, %.2f), frame: %s",point_base.point.x, point_base.point.y, point_base.point.z,point_base.header.frame_id.c_str());}catch (const std::exception &e){ROS_ERROR("%s", e.what());}rate.sleep();ros::spinOnce();}return 0;
}
编译后,执行 rosrun tf2_learning tf2_learning_broadcast 开始广播坐标,此时打开rviz订阅TF看到TF树模型,操作与结果如下:
- 输入命令:rviz
- 在启动的 rviz 中设置
Fixed Frame为base_link - 点击左下的
Add按钮,在弹出的窗口中选择TF组件,即可显示坐标关系。

继续执行命令rosrun tf2_learning tf2_learning_listen可以看到转换后的坐标,以及所属父坐标系,如下:

其中,ERROR是由于节点刚起来时,TF数据还未来得及写入缓存,导致base_link不存在,可以发现第二次调用就没有报错了,实际使用中,可以等待要操作的frame存在再做转换,如下:
tf2_ros::Buffer buffer;
tf2_ros::TransformListener listener(buffer);
// _frameExists()返回指定frame是否存在于tf树中
if (!buffer._frameExists("base_link"))
{ROS_WARN("base_link frame does not exist.");
}
二、静态坐标变换(Python实现)
在创建的 tf2_learning 包路径下 src 目录的同级,创建一个 scripts 目录,在这里存储脚本(如python脚本),我们创建 tf2_learning_broadcast.py 以实现坐标广播,编辑内容如下:
#! /usr/bin/env pythonimport rospy
import tf
import tf2_ros
from geometry_msgs.msg import TransformStampedif __name__ == "__main__":# 初始化 ROS 节点rospy.init_node("static_frame_broadcast_py")# 创建静态坐标广播器broadcaster = tf2_ros.StaticTransformBroadcaster()# 创建并组织被广播的消息tfs = TransformStamped()# -- 头信息tfs.header.frame_id = "base_link" # 父坐标系tfs.header.stamp = rospy.Time.now()tfs.header.seq = 101# -- 子坐标系tfs.child_frame_id = "laser"# -- 坐标系相对信息# ---- 相对于父坐标系的平移偏移量tfs.transform.translation.x = 0.5tfs.transform.translation.y = 0.0tfs.transform.translation.z = 0.3# ---- 相对于父坐标系的旋转偏移量# ---- 设置欧拉角,并将欧拉角转换成四元数qtn = tf.transformations.quaternion_from_euler(0, 0, 0)tfs.transform.rotation.x = qtn[0]tfs.transform.rotation.y = qtn[1]tfs.transform.rotation.z = qtn[2]tfs.transform.rotation.w = qtn[3]# 广播器发送消息broadcaster.sendTransform(tfs)# spinrospy.spin()
创建 tf2_learning_listen.py 以订阅静态坐标转换关系,并利用该关系将雷达坐标系的点转换到 base_link 坐标系,编辑内容如下:
#! /usr/bin/env pythonimport rospy
import tf2_ros
# 不要使用 geometry_msgs,需要使用 tf2 内置的消息类型
from tf2_geometry_msgs import PointStamped
# from geometry_msgs.msg import PointStampedif __name__ == "__main__":# 初始化 ROS 节点rospy.init_node("static_frame_listen")# 创建 TF 订阅对象buffer = tf2_ros.Buffer()listener = tf2_ros.TransformListener(buffer)rate = rospy.Rate(1)while not rospy.is_shutdown():# 生成一个坐标点, 模拟雷达检测到的障碍物坐标点(雷达坐标系下的坐标)point_laser = PointStamped()point_laser.header.frame_id = "laser"point_laser.header.stamp = rospy.Time.now()point_laser.point.x = 2.0point_laser.point.y = 2.5point_laser.point.z = 0.3try:# 转换坐标点, 计算障碍物坐标点在 base_link 下的坐标point_base = buffer.transform(point_laser, "base_link")rospy.loginfo("point_base: (%.2f, %.2f, %.2f), frame: %s",point_base.point.x,point_base.point.y,point_base.point.z,point_base.header.frame_id)except Exception as e:rospy.logerr("%s", e)# spinrate.sleep()
相关文章:
ROS TF坐标变换 - 静态坐标变换
目录 一、静态坐标变换(C实现)二、静态坐标变换(Python实现) 如前文所属,ROS通过广播的形式告知各模块的位姿关系,接下来详述这一机制的代码实现。 模块间的位置关系有两种类型,一种是相对固定…...

香橙派5plus从ssd启动Ubuntu
官方接口图 我实际会用到的就几个接口,背面的话就一个M.2固态的位置: 其中WIFI模块的接口应该也可以插2230的固态,不过是pcie2.0的速度,背面的接口则是pcie3.0*4的速度,差距还是挺大的。 开始安装系统 准备工作 一张…...

JWT+Redis 实现接口 Token 校验
1、业务逻辑 有一些接口,需要用户登录以后才能访问,用户没有登录则无法访问。 因此,对于一些限制用户访问的接口,可以在请求头中增加一个校验参数,用于判断接口对应的用户是否登录。 而对于一些不需要登录即可访问的接…...
C语言 linux文件操作(二)
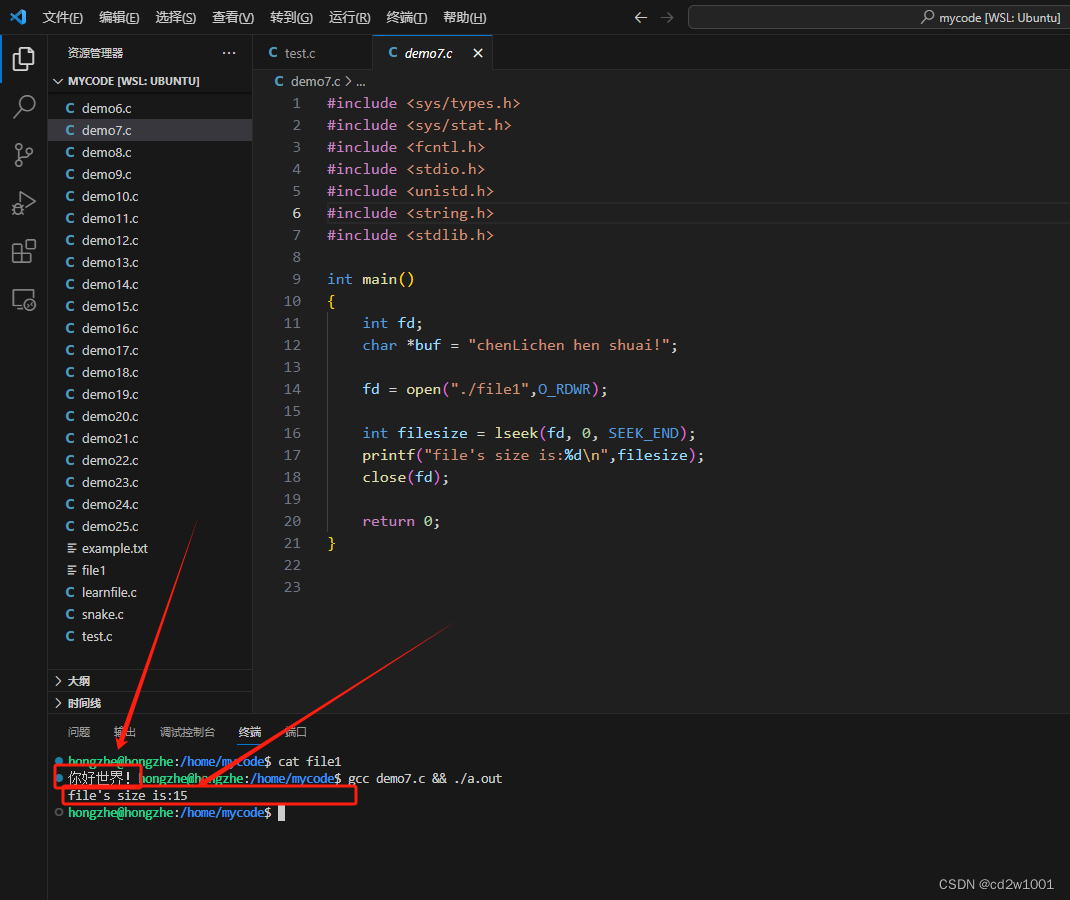
文章目录 一、获取文件长度二、追加写入三、覆盖写入四、文件创建函数creat 一、获取文件长度 通过lseek函数,除了操作定位文件指针,还可以获取到文件大小,注意这里是文件大小,单位是字节。例如在file1文件中事先写入"你好世…...
机器学习分类
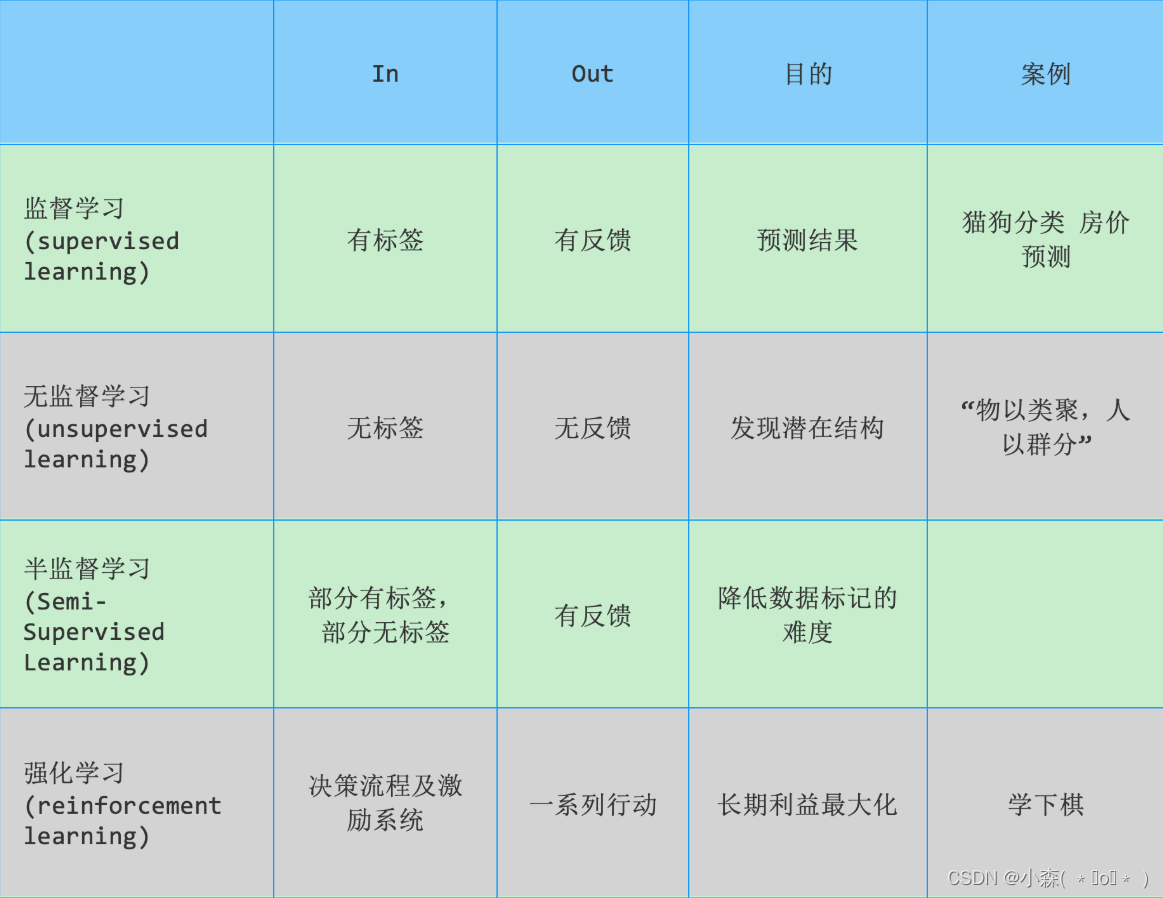
1. 监督学习 监督学习指的是人们给机器一大堆标记好的数据,比如: 一大堆照片,标记出哪些是猫的照片,哪些是狗的照片 让机器自己学习归纳出算法或模型 使用该算法或模型判断出其他没有标记的照片是否是猫或狗 上述流程如下图所…...
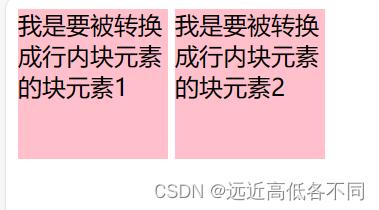
CSS之元素转换
我想大家在写代码时有一个疑问,块级元素可以转换成其他元素吗? 让我为大家介绍一下元素转换 1.display:block(转换成块元素) display:block可以把我们的行内元素或者行内块元素转换成块元素 接下来让我为大家演示一下: <!DO…...
自激振荡电路笔记 电弧打火机
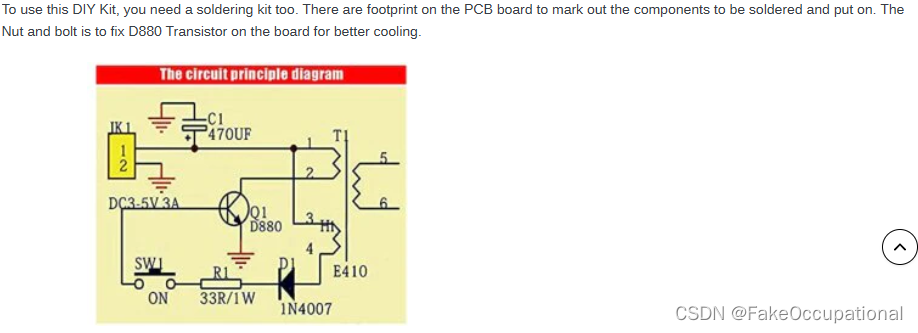
三极管相关 三极管的形象描述 二极管 简单求解(理想) 优先导通(理想) 恒压降 稳压管(二极管plus) 基础工作模块 理想稳压管的工作特性 晶体管之三极管(“两个二极管的组合” ) 电弧打火机电路 1.闭合开…...

Linux su 命令
Linux su(英文全拼:switch user)命令用于变更为其他使用者的身份,除 root 外,需要键入该使用者的密码。 使用权限:所有使用者。 语法 su [-fmp] [-c command] [-s shell] [--help] [--version] [-] [USE…...
论文阅读: AAAI 2022行人重识别方向论文-PFD_Net
本篇博客用于记录一篇行人重识别方向的论文所提出的优化方法《Pose-Guided Feature Disentangling for Occluded Person Re-identification Based on Transformer》,论文中提出的PDF_Net模型的backbone是采用《TransReID: Transformer-based Object Re-Identificati…...

蓝牙物联网灯控设计方案
蓝牙技术是当前应用最广泛的无线通信技术之一,工作在全球通用的 2.4GHZ 的ISM 频段。蓝牙的工作距离约为 100 米,具有一定的穿透性,没有方向限制。具有低成本、抗干扰能力强、传输质量高、低功耗等特点。蓝牙技术组网比较简单,无需…...
Codeforces Round 900 (Div. 3)(A-F)
比赛链接 : Dashboard - Codeforces Round 900 (Div. 3) - Codeforces A. How Much Does Daytona Cost? 题面 : 思路 : 在序列中只要找到k,就返回true ; 代码 : #include<bits/stdc.h> #define IOS ios::sync_with_stdio(0);cin.tie(0);cout.tie(0)…...

vue大屏-列表自动滚动vue-seamless-scroll
vue大屏-列表自动滚动vue-seamless-scroll vue-seamless-scroll的官方文档地址:https://chenxuan0000.github.io/vue-seamless-scroll/zh/guide/ 具体效果可到官方文档那里查看。 1、下载依赖 npm install vue-seamless-scroll --save2、使用例子 <template…...
easyx的窗口函数
文章目录 前言一、EasyX的颜色二、EasyX的坐标和设备1,EasyX的坐标2,EasyX的设备 三、窗口函数1,初始化窗口函数2,关闭绘图窗口3,设置窗口背景板颜色4,清空绘图设备 前言 easyx是针对c的图形库,…...

【记录】开始学习网络安全
本文持续更新学习进度 背景 在私企干了5年虚拟化、云原生相关的运维,学到了很多,但不成体系。老板是清华毕业法国留学在德勤干过,最后回国创业的野路子。我工作是为了更好的生活,我挺担心老板因为家庭变故或者炒个原油宝&#x…...
【Java EE初阶三 】线程的状态与安全(下)
3. 线程安全 线程安全:某个代码,不管它是单个线程执行,还是多个线程执行,都不会产生bug,这个情况就成为“线程安全”。 线程不安全:某个代码,它单个线程执行,不会产生bug,…...

MD5算法
一、引言 MD5(Message-Digest Algorithm 5)是一种广泛应用的密码散列算法,由Ronald L. Rivest于1991年提出。MD5算法主要用于对任意长度的消息进行加密,将消息压缩成固定长度的摘要(通常为128位)。在密码学…...

Postman使用
Postman使用 Pre-request Script 参考: Scripting in Postman 可以请求、集合或文件夹中添加Pre-request Script,在请求运行之前执行JavaScript 如设置变量值、参数、Header和正文数据,也可以使用Pre-request Script来调试代码࿰…...
【python 的各种模块】(8) 在python使用matplotlib和wordcloud库来画wordcloud词云图
目录 目标:用python画出,网上流行的wordcloud词云图 1 准备工作 1.1环境准备 1.1.1安装步骤 1.2 资源准备 1.2.1 文本文件内容如下 1.2.2 图片资源 2 代码测试 2.1 第一版代码和效果 2.1.1 代码和效果 2.1.2 一般plt里解决中文乱码问题 2.1…...
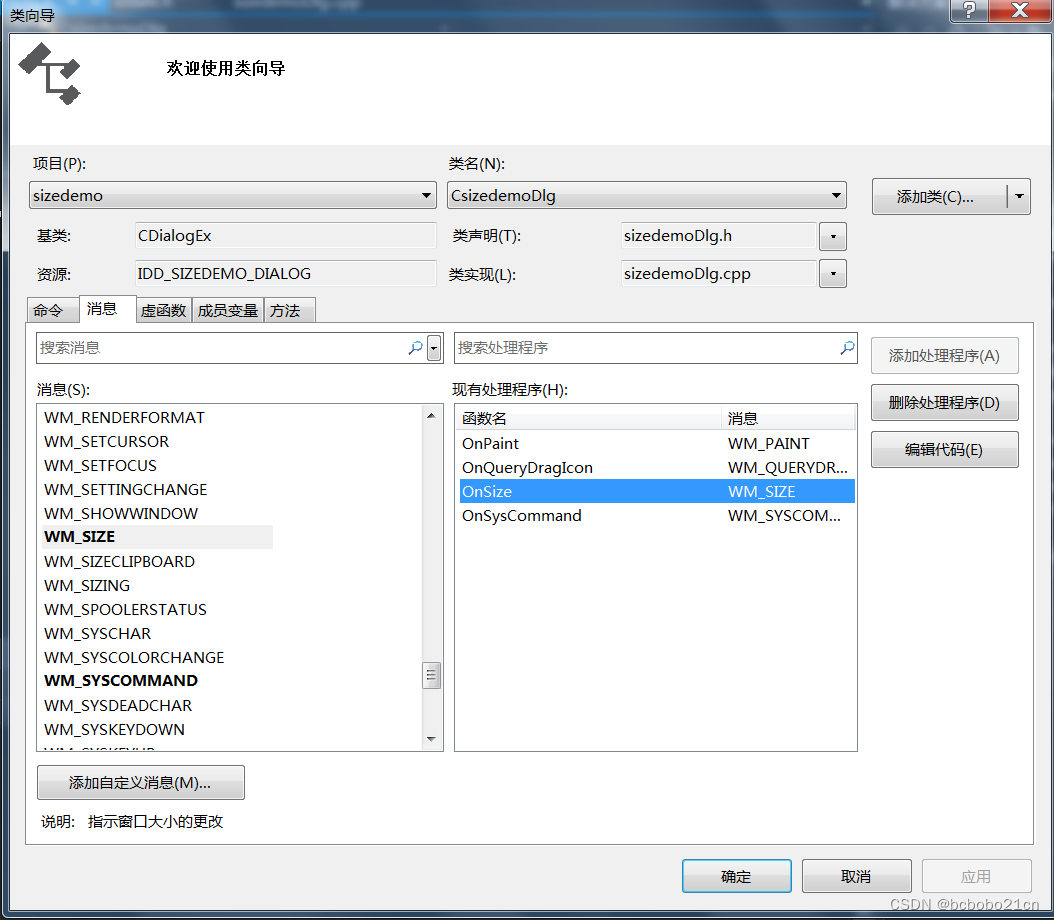
MFC随对话框大小改变同时改变控件大小
先看一下效果; 初始; 窗口变大,控件也变大; 二个也可以; 窗口变大,控件变大; 默认生成的对话框没有WM_SIZE消息的处理程序;打开类向导,选中WM_SIZE消息,对CxxxDlg类添加该消息的处理程序;默认生成的函数名是OnSize; 添加了以后代码中会有三处变化; 在对话框类的…...

MK米客方德品牌 SD NAND在对讲机领域的引领作用
SD NAND在对讲机上的应用 SD NAND在对讲机上广泛应用,为其提供了高效可靠的存储解决方案。 这种存储技术不仅能容纳大量语音和数据文件,而且具有高速读取的特点,保障了实时通信的质量。SD NAND还注重安全性,通过数据加密和访问控…...
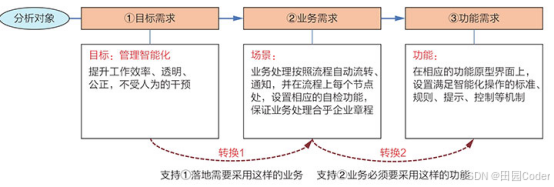
大话软工笔记—需求分析概述
需求分析,就是要对需求调研收集到的资料信息逐个地进行拆分、研究,从大量的不确定“需求”中确定出哪些需求最终要转换为确定的“功能需求”。 需求分析的作用非常重要,后续设计的依据主要来自于需求分析的成果,包括: 项目的目的…...

Xen Server服务器释放磁盘空间
disk.sh #!/bin/bashcd /run/sr-mount/e54f0646-ae11-0457-b64f-eba4673b824c # 全部虚拟机物理磁盘文件存储 a$(ls -l | awk {print $NF} | cut -d. -f1) # 使用中的虚拟机物理磁盘文件 b$(xe vm-disk-list --multiple | grep uuid | awk {print $NF})printf "%s\n"…...

PAN/FPN
import torch import torch.nn as nn import torch.nn.functional as F import mathclass LowResQueryHighResKVAttention(nn.Module):"""方案 1: 低分辨率特征 (Query) 查询高分辨率特征 (Key, Value).输出分辨率与低分辨率输入相同。"""def __…...
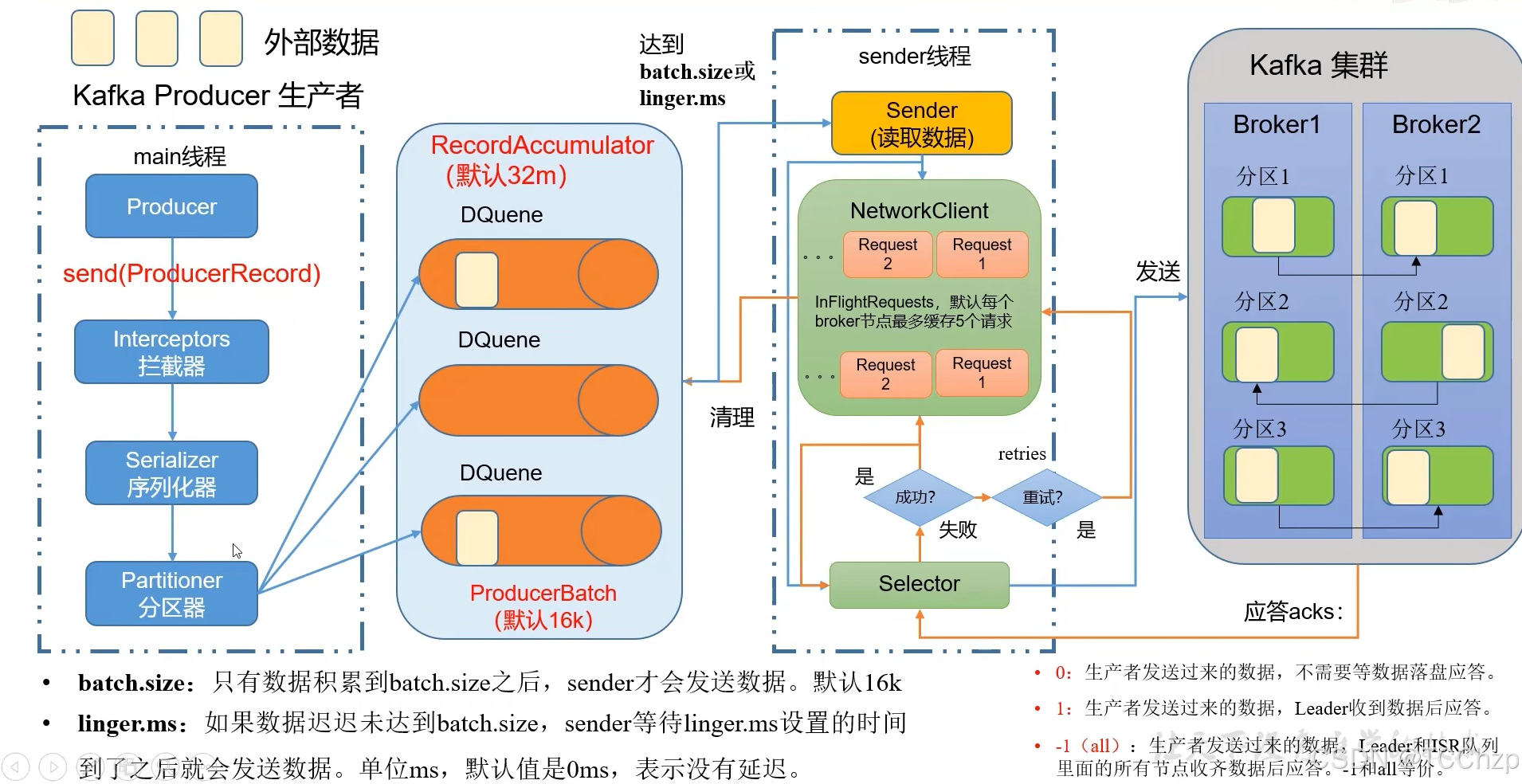
Kafka入门-生产者
生产者 生产者发送流程: 延迟时间为0ms时,也就意味着每当有数据就会直接发送 异步发送API 异步发送和同步发送的不同在于:异步发送不需要等待结果,同步发送必须等待结果才能进行下一步发送。 普通异步发送 首先导入所需的k…...

MySQL 8.0 事务全面讲解
以下是一个结合两次回答的 MySQL 8.0 事务全面讲解,涵盖了事务的核心概念、操作示例、失败回滚、隔离级别、事务性 DDL 和 XA 事务等内容,并修正了查看隔离级别的命令。 MySQL 8.0 事务全面讲解 一、事务的核心概念(ACID) 事务是…...

【Android】Android 开发 ADB 常用指令
查看当前连接的设备 adb devices 连接设备 adb connect 设备IP 断开已连接的设备 adb disconnect 设备IP 安装应用 adb install 安装包的路径 卸载应用 adb uninstall 应用包名 查看已安装的应用包名 adb shell pm list packages 查看已安装的第三方应用包名 adb shell pm list…...

MySQL 部分重点知识篇
一、数据库对象 1. 主键 定义 :主键是用于唯一标识表中每一行记录的字段或字段组合。它具有唯一性和非空性特点。 作用 :确保数据的完整性,便于数据的查询和管理。 示例 :在学生信息表中,学号可以作为主键ÿ…...
基于PHP的连锁酒店管理系统
有需要请加文章底部Q哦 可远程调试 基于PHP的连锁酒店管理系统 一 介绍 连锁酒店管理系统基于原生PHP开发,数据库mysql,前端bootstrap。系统角色分为用户和管理员。 技术栈 phpmysqlbootstrapphpstudyvscode 二 功能 用户 1 注册/登录/注销 2 个人中…...
通过MicroSip配置自己的freeswitch服务器进行调试记录
之前用docker安装的freeswitch的,启动是正常的, 但用下面的Microsip连接不上 主要原因有可能一下几个 1、通过下面命令可以看 [rootlocalhost default]# docker exec -it freeswitch fs_cli -x "sofia status profile internal"Name …...
如何做好一份技术文档?从规划到实践的完整指南
如何做好一份技术文档?从规划到实践的完整指南 🌟 嗨,我是IRpickstars! 🌌 总有一行代码,能点亮万千星辰。 🔍 在技术的宇宙中,我愿做永不停歇的探索者。 ✨ 用代码丈量世界&…...