20231228在Firefly的AIO-3399J开发板的Android11的Firefly的AIO-3399J开发板的DTS配置单前置摄像头ov13850
20231228在Firefly的AIO-3399J开发板的Android11的Firefly的AIO-3399J开发板的DTS配置单前置摄像头ov13850
2023/12/28 12:30
开发板:Firefly的AIO-3399J【RK3399】
SDK:rk3399-android-11-r20211216.tar.xz【Android11】
Android11.0.tar.bz2.aa【ToyBrick】
Android11.0.tar.bz2.ab
Android11.0.tar.bz2.ac
https://wiki.t-firefly.com/AIO-3399J/prepare_compile_android.html
AIO-3399J产品规格书 立即购买
AIO-3399J 采用 RK3399 六核(A72x2+A53x4) 64 位处理器,主频高达1.8GHz,集成了四核 Mali-T860 GPU,性能优异。
1、简略步骤:
rootroot@rootroot-X99-Turbo:~/3TB$ cat Android11.0.tar.bz2.a* > Android11.0.tar.bz2
rootroot@rootroot-X99-Turbo:~/3TB$ tar jxvf Android11.0.tar.bz2
rootroot@rootroot-X99-Turbo:~/3TB$ mv Android11.0 61Android11.0
rootroot@rootroot-X99-Turbo:~/3TB$ cd 61Android11.0
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0$ cd u-boot
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0/u-boot$ ./make.sh rk3399
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0/u-boot$ cd ..
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0$ cd kernel/
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0/kernel$ make ARCH=arm64 rockchip_defconfig android-11.config -j36
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0/kernel$ make ARCH=arm64 BOOT_IMG=../rockdev/Image-rk3399_Android11/boot.img rk3399-firefly-aio.img -j36
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0$ source build/envsetup.sh
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0$ lunch
42. rk3399_Android11-userdebug
Which would you like? [aosp_arm-eng] 42
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0$
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0$ make -j36
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0$ ./build.sh -u
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0/kernel$ make ARCH=arm64 BOOT_IMG=../rockdev/Image-rk3399_Android11/boot.img rk3399-sapphire-excavator-edp-avb.img -j36
2、【这个不重要,可以不用修改!】
不知道是ov13850的对reset/pwdn引脚不重要,还是在驱动ov13850.c中另行配置!
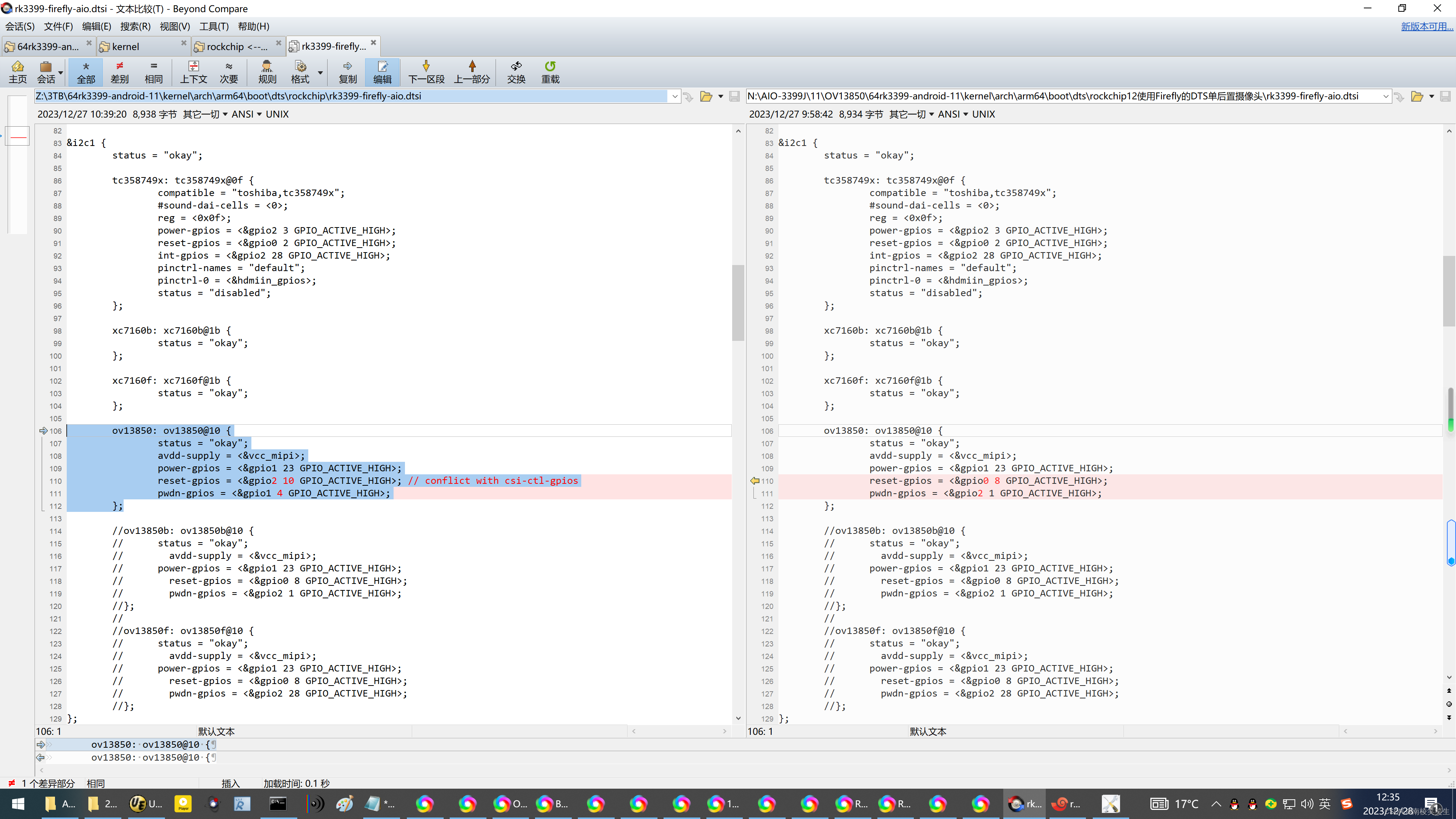
Z:\3TB\64rk3399-android-11\kernel\arch\arm64\boot\dts\rockchip\rk3399-firefly-aio.dtsi
&i2c1 {
status = "okay";
tc358749x: tc358749x@0f {
compatible = "toshiba,tc358749x";
#sound-dai-cells = <0>;
reg = <0x0f>;
power-gpios = <&gpio2 3 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio0 2 GPIO_ACTIVE_HIGH>;
int-gpios = <&gpio2 28 GPIO_ACTIVE_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&hdmiin_gpios>;
status = "disabled";
};
xc7160b: xc7160b@1b {
status = "okay";
};
xc7160f: xc7160f@1b {
status = "okay";
};
ov13850: ov13850@10 {
status = "okay";
avdd-supply = <&vcc_mipi>;
power-gpios = <&gpio1 23 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio2 10 GPIO_ACTIVE_HIGH>; // conflict with csi-ctl-gpios
pwdn-gpios = <&gpio1 4 GPIO_ACTIVE_HIGH>;
};
//ov13850b: ov13850b@10 {
// status = "okay";
// avdd-supply = <&vcc_mipi>;
// power-gpios = <&gpio1 23 GPIO_ACTIVE_HIGH>;
// reset-gpios = <&gpio0 8 GPIO_ACTIVE_HIGH>;
// pwdn-gpios = <&gpio2 1 GPIO_ACTIVE_HIGH>;
//};
//
//ov13850f: ov13850f@10 {
// status = "okay";
// avdd-supply = <&vcc_mipi>;
// power-gpios = <&gpio1 23 GPIO_ACTIVE_HIGH>;
// reset-gpios = <&gpio0 8 GPIO_ACTIVE_HIGH>;
// pwdn-gpios = <&gpio2 28 GPIO_ACTIVE_HIGH>;
//};
};

2、
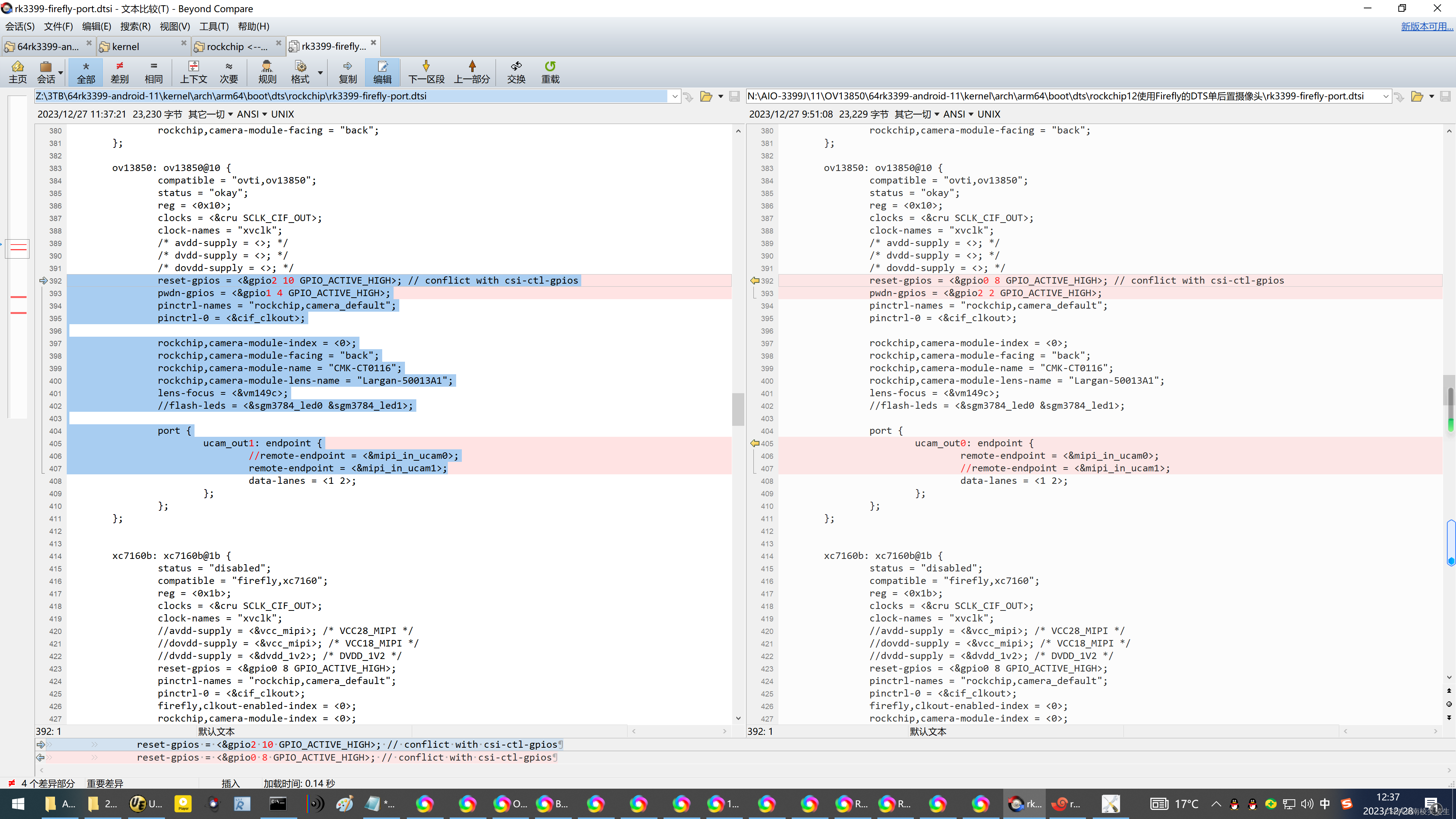
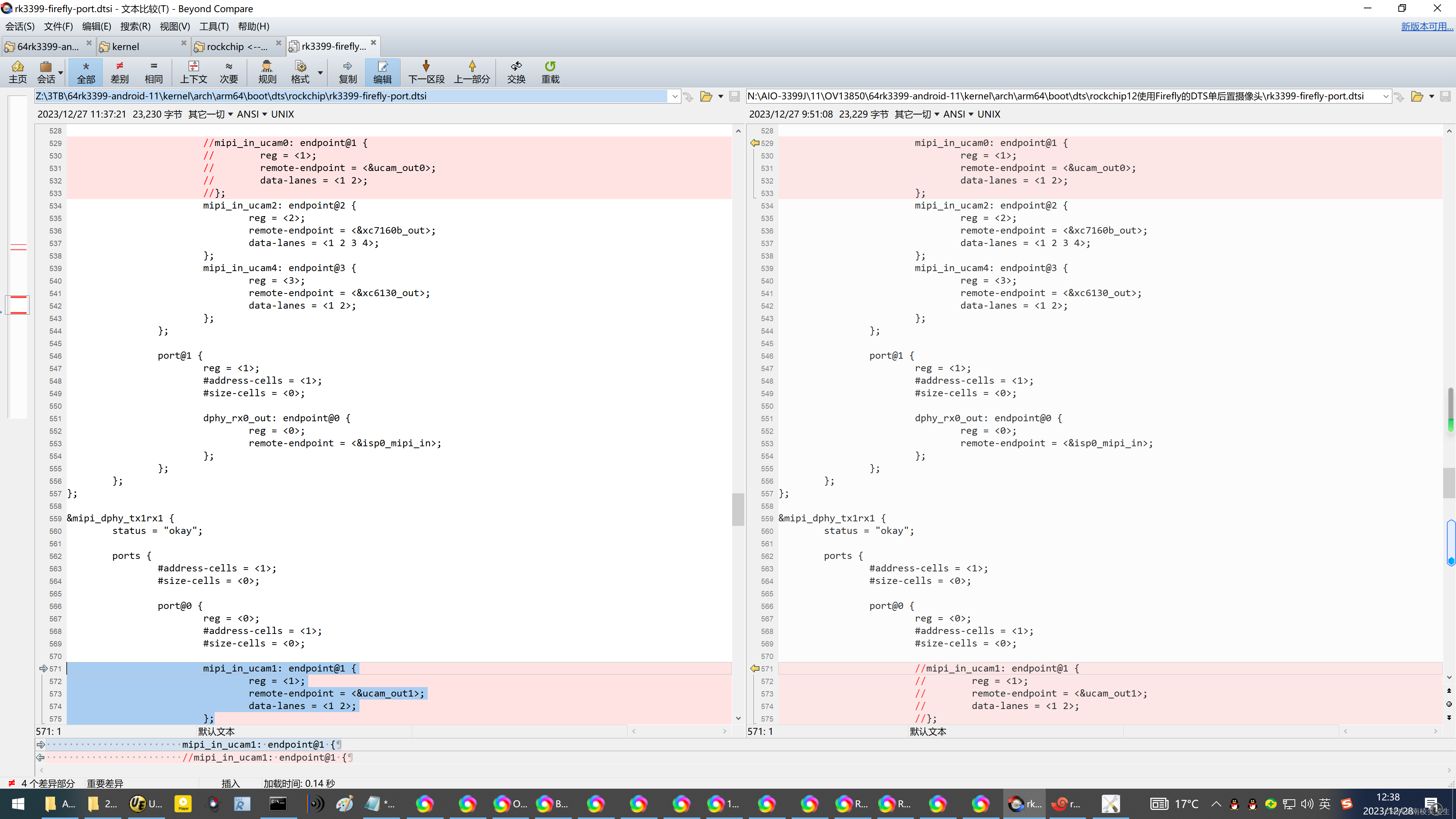
Z:\3TB\64rk3399-android-11\kernel\arch\arm64\boot\dts\rockchip\rk3399-firefly-port.dtsi
&i2c1 {
status = "okay";
i2c-scl-rising-time-ns = <300>;
i2c-scl-falling-time-ns = <15>;
clock-frequency = <400000>;
es8323: es8323@10 {
compatible = "everest,es8323";
reg = <0x10>;
spk-ctl-gpio = <&gpio1 0 GPIO_ACTIVE_HIGH>;
clock-names = "mclk";
clocks = <&cru SCLK_I2S_8CH_OUT>;
pinctrl-names = "default";
pinctrl-0 = <&i2s_8ch_mclk>;
#sound-dai-cells = <0>;
extcon = <&rk_headset>;
status = "disabled";
};
rt5640: rt5640@1c {
#sound-dai-cells = <0>;
compatible = "realtek,rt5640";
reg = <0x1c>;
clocks = <&cru SCLK_I2S_8CH_OUT>;
clock-names = "mclk";
realtek,in1-differential;
pinctrl-names = "default";
pinctrl-0 = <&i2s_8ch_mclk>;
//hp-con-gpio = <&gpio4 21 GPIO_ACTIVE_HIGH>;
//hp-det-gpio = <&gpio4 28 GPIO_ACTIVE_LOW>;
io-channels = <&saradc 4>;
hp-det-adc-value = <500>;
status = "okay";
};
gti5801: gti5801@60 {
compatible = "gyrfalcon,spr5801";
reg = <0x60>;
status = "disabled";
};
vm149c: vm149c@0c {
compatible = "silicon touch,vm149c";
status = "okay";
reg = <0x0c>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
};
ov13850: ov13850@10 {
compatible = "ovti,ov13850";
status = "okay";
reg = <0x10>;
clocks = <&cru SCLK_CIF_OUT>;
clock-names = "xvclk";
/* avdd-supply = <>; */
/* dvdd-supply = <>; */
/* dovdd-supply = <>; */
reset-gpios = <&gpio2 10 GPIO_ACTIVE_HIGH>; // conflict with csi-ctl-gpios
pwdn-gpios = <&gpio1 4 GPIO_ACTIVE_HIGH>;
pinctrl-names = "rockchip,camera_default";
pinctrl-0 = <&cif_clkout>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "CMK-CT0116";
rockchip,camera-module-lens-name = "Largan-50013A1";
lens-focus = <&vm149c>;
//flash-leds = <&sgm3784_led0 &sgm3784_led1>;
port {
ucam_out1: endpoint {
//remote-endpoint = <&mipi_in_ucam0>;
remote-endpoint = <&mipi_in_ucam1>;
data-lanes = <1 2>;
};
};
};
xc7160b: xc7160b@1b {
status = "disabled";
compatible = "firefly,xc7160";
reg = <0x1b>;
clocks = <&cru SCLK_CIF_OUT>;
clock-names = "xvclk";
//avdd-supply = <&vcc_mipi>; /* VCC28_MIPI */
//dovdd-supply = <&vcc_mipi>; /* VCC18_MIPI */
//dvdd-supply = <&dvdd_1v2>; /* DVDD_1V2 */
reset-gpios = <&gpio0 8 GPIO_ACTIVE_HIGH>;
pinctrl-names = "rockchip,camera_default";
pinctrl-0 = <&cif_clkout>;
firefly,clkout-enabled-index = <0>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "NC";
rockchip,camera-module-lens-name = "NC";
port {
xc7160b_out: endpoint {
remote-endpoint = <&mipi_in_ucam2>;
data-lanes = <1 2 3 4>;
};
};
};
xc7160f: xc7160f@1b {
status = "disabled";
compatible = "firefly,xc7160";
reg = <0x1b>;
clocks = <&cru SCLK_CIF_OUT>;
clock-names = "xvclk";
//avdd-supply = <&vcc_mipi>; /* VCC28_MIPI */
//dovdd-supply = <&vcc_mipi>; /* VCC18_MIPI */
//dvdd-supply = <&dvdd_1v2>; /* DVDD_1V2 */
reset-gpios = <&gpio0 8 GPIO_ACTIVE_HIGH>;
pinctrl-names = "rockchip,camera_default";
pinctrl-0 = <&cif_clkout>;
firefly,clkout-enabled-index = <0>;
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "front";
rockchip,camera-module-name = "NC";
rockchip,camera-module-lens-name = "NC";
port {
xc7160f_out: endpoint {
remote-endpoint = <&mipi_in_ucam3>;
data-lanes = <1 2 3 4>;
};
};
};
XC6130b: XC6130b@23{
status = "disabled";
compatible = "firefly,xc7022";
reg = <0x23>;
clocks = <&cru SCLK_CIF_OUT>;
clock-names = "xvclk";
//avdd-supply = <&vcc_mipi>;
reset-gpios = <&gpio1 22 GPIO_ACTIVE_HIGH>;
pinctrl-names = "rockchip,camera_default";
pinctrl-0 = <&cif_clkout>;
firefly,clkout-enabled-index = <0>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "NC";
rockchip,camera-module-lens-name = "NC";
port {
xc6130_out: endpoint {
remote-endpoint = <&mipi_in_ucam4>;
data-lanes = <1 2>;
};
};
};
XC7022b: XC7022b@1b{
status = "disabled";
compatible = "firefly,xc7022";
reg = <0x1b>;
clocks = <&cru SCLK_CIF_OUT>;
clock-names = "xvclk";
//avdd-supply = <&vcc_mipi>;
reset-gpios = <&gpio1 23 GPIO_ACTIVE_HIGH>;
pinctrl-names = "rockchip,camera_default";
pinctrl-0 = <&cif_clkout>;
firefly,clkout-enabled-index = <0>;
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "front";
rockchip,camera-module-name = "NC";
rockchip,camera-module-lens-name = "NC";
port {
xc7022_out: endpoint {
remote-endpoint = <&mipi_in_ucam5>;
data-lanes = <1 2>;
};
};
};
};
&i2c1_xfer{
rockchip,pins =
<4 2 RK_FUNC_1 &pcfg_pull_up>,
<4 1 RK_FUNC_1 &pcfg_pull_up>;
};
&mipi_dphy_rx0 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
//mipi_in_ucam0: endpoint@1 {
// reg = <1>;
// remote-endpoint = <&ucam_out0>;
// data-lanes = <1 2>;
//};
mipi_in_ucam2: endpoint@2 {
reg = <2>;
remote-endpoint = <&xc7160b_out>;
data-lanes = <1 2 3 4>;
};
mipi_in_ucam4: endpoint@3 {
reg = <3>;
remote-endpoint = <&xc6130_out>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
dphy_rx0_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&isp0_mipi_in>;
};
};
};
};
&mipi_dphy_tx1rx1 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam1: endpoint@1 {
reg = <1>;
remote-endpoint = <&ucam_out1>;
data-lanes = <1 2>;
};
mipi_in_ucam3: endpoint@2 {
reg = <2>;
remote-endpoint = <&xc7160f_out>;
data-lanes = <1 2 3 4>;
};
mipi_in_ucam5: endpoint@3 {
reg = <3>;
remote-endpoint = <&xc7022_out>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
dphy_tx1rx1_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&isp1_mipi_in>;
};
};
};
};

参考资料:
http://www.friendlyelec.com.cn/agent.asp
http://www.friendlyelec.com.cn/
https://download.friendlyelec.com/NanoPC-T4
https://wiki.friendlyelec.com/wiki/index.php/NanoPC-T4/zh#.E4.B8.8B.E8.BD.BDAndroid10.E6.BA.90.E4.BB.A3.E7.A0.81
https://item.taobao.com/item.htm?spm=a1z09.2.0.0.37562e8dcotDm6&id=570312633249&_u=7ju3ku004a
友善NanoPC-T4瑞芯微RK3399开发板ROS双摄4K播放开源AI智能安卓10
WiKi维基教程(固件介绍,使用说明,操作步骤等)
http://wiki.friendlyelec.com/wiki/index.php/NanoPC-T4
系统固件下载
https://dl.friendlyelec.com/nanopct4
原理图(pdf格式)
http://wiki.friendlyelec.com/wiki/images/e/e0/NanoPC-T4-1902-Schematic.pdf
尺寸图(dxf格式)
http://wiki.friendlyelec.com/wiki/images/b/bc/NanoPC-T4_1802_Drawing%28dxf%29.zip
http://www.friendlyelec.com.cn/nanopi-m4.asp
NanoPi M4 | NanoPi M4V2
https://wiki.friendlyelec.com/wiki/index.php/NanoPi_M4/zh
15.3 编译Android10源代码
15.3.1 下载Android10源代码
有以下两种途径获取 Android10 的源代码,都需要联网:
使用网盘里的git repo压缩包
网盘下载地址: 点击进入
https://download.friendlyelec.com/NanoPiM4
https://pan.baidu.com/share/init?surl=oBLn9H31hILJKEPQXgrUog
提取码:yn6r



相关文章:
20231228在Firefly的AIO-3399J开发板的Android11的Firefly的AIO-3399J开发板的DTS配置单前置摄像头ov13850
20231228在Firefly的AIO-3399J开发板的Android11的Firefly的AIO-3399J开发板的DTS配置单前置摄像头ov13850 2023/12/28 12:30 开发板:Firefly的AIO-3399J【RK3399】 SDK:rk3399-android-11-r20211216.tar.xz【Android11】 Android11.0.tar.bz2.aa【ToyBr…...

php-fpm运行一段时间,内存不足
目录 一:原因分析 二:解决 三:观察系统情况 php-fpm运行一段时间,内存不足,是什么原因呢。 一:原因分析 1:首先php-fpm的配置 (1)启动的进程数 启动的进程数越多,占用内存越高; 2:其次…...
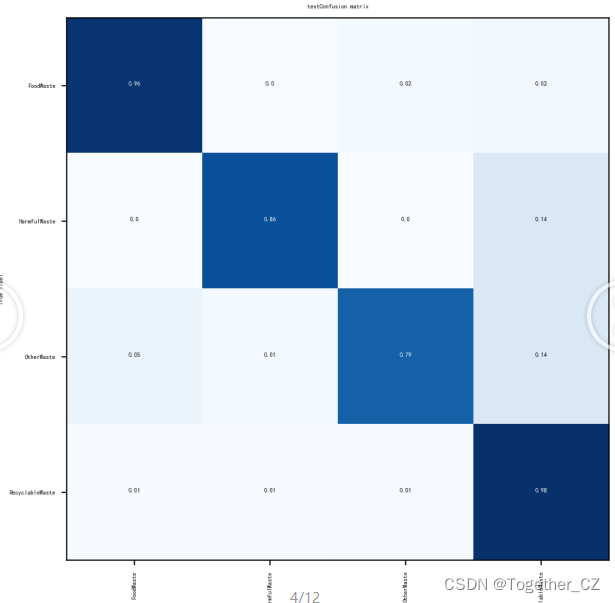
基于轻量级GhostNet模型开发构建生活场景下生活垃圾图像识别系统
轻量级识别模型在我们前面的博文中已经有过很多实践了,感兴趣的话可以自行移步阅读: 《移动端轻量级模型开发谁更胜一筹,efficientnet、mobilenetv2、mobilenetv3、ghostnet、mnasnet、shufflenetv2驾驶危险行为识别模型对比开发测试》 《基…...

《Linux系列》Linux磁盘MBR分区扩容
文章目录 Linux磁盘MBR分区扩容1.前言2.控制台磁盘扩容3.分区扩容3.1 fdisk3.2 lsblk3.3 扩容分区 4.扩容文件系统4.1 df4.2 扩容文件系统 Linux磁盘MBR分区扩容 1)参考阿里云扩容分区文档,整理MBR分区扩容 2)本文档适用于MBR分区(fdisk -lu查…...

IPv6地址配置
IPv6地址接口配置 IPv6地址结构 一个IPv6地址可以分为两部分: 网络前缀:n比特,相当于IPv4地址中的网络ID 接口标识:128-n比特,相当于IPv4地址中的主机ID 注意: 对于IPv6单播地址来说,如果地址的前三bit不是000,则接口标识必须为64位,如果地址的前三位是000,则没有此…...

Ubuntu20.04 防火墙配置
ubuntu 系统中配置防火墙 ufw(Uncomplicated Firewall)是一个简化的、易于使用的Linux防火墙工具,旨在方便用户管理iptables防火墙规则。 特点 简化的防火墙管理:ufw提供了一个简洁的命令行界面,让您能够轻松地添加、…...
Windows上ModbusTCP模拟Master与Slave工具的使用
场景 Modbus Slave 与 Modbus Poll主从设备模拟软件与Configure Virtual Serial串口模拟软件使用: Modebus Slave 与 Modbus Poll主从设备模拟软件与Configure Virtual Serial串口模拟软件使用_modbus poll激活-CSDN博客 数据对接协议为Modbus TCP,本地开发需要使…...
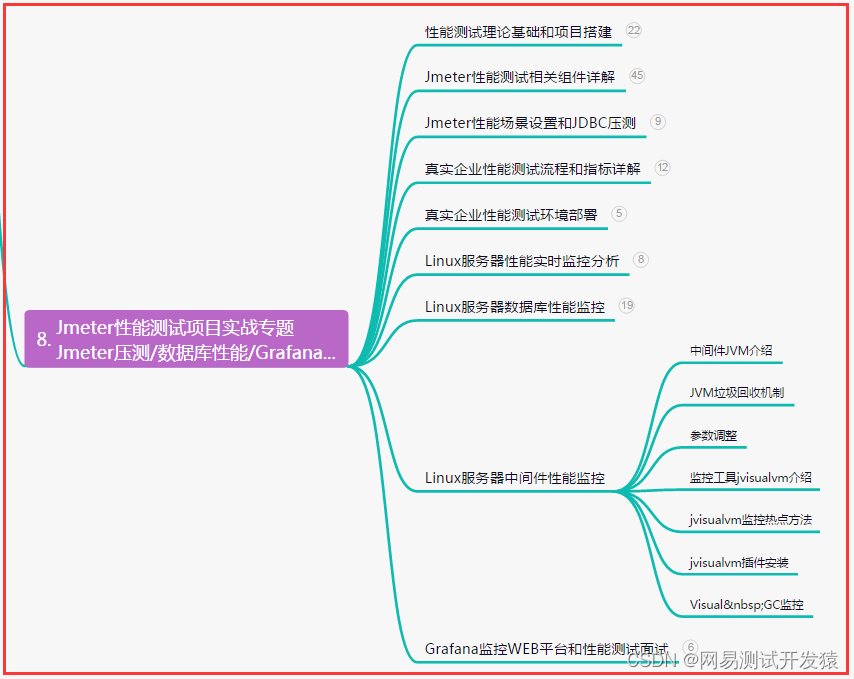
史上最细,13年老鸟总结-性能测试7大关键点,一篇打通...
目录:导读 前言一、Python编程入门到精通二、接口自动化项目实战三、Web自动化项目实战四、App自动化项目实战五、一线大厂简历六、测试开发DevOps体系七、常用自动化测试工具八、JMeter性能测试九、总结(尾部小惊喜) 前言 1、测试环境的鉴定…...

长虹智能电视ZLM60HiS机芯刷机方法及刷机固件,附进维修模式方法
适配机芯:ZLM60HiS 型号:Q1FU、D6000i、U3、D8000ID 软件强制升级方法: 1、下载后解压,找到upgrade_ZLM60HiS_MT5508_V1.00xxx_part.pkg 、chandroid_ota_ZLM60HiS_datapart.zip复制到U盘根目录(不要有任何文件夹&a…...

计算机网络【Google的TCP BBR拥塞控制算法深度解析】
Google的TCP BBR拥塞控制算法深度解析 宏观背景下的BBR 慢启动、拥塞避免、快速重传、快速恢复: 说实话,这些机制完美适应了1980年代的网络特征,低带宽,浅缓存队列,美好持续到了2000年代。 随后互联网大爆发&#x…...
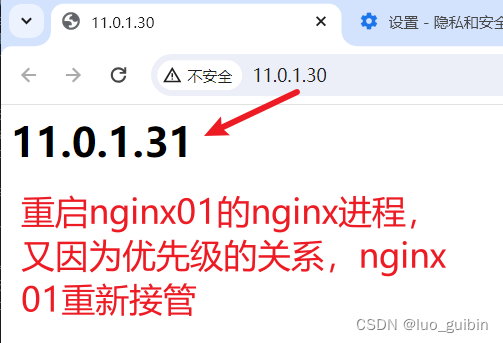
lvs+keepalived+nginx实现四层负载+七层负载
目录 一、lvs配置 二、nginx配置 三、测试 3.1 keepalived负载均衡 3.2 lvskeepalived高可用 3.3 nginx高可用 主机IPlvs01-33 11.0.1.33 lvs02-3411.0.1.34nginx0111.0.1.31nginx0211.0.1.32VIP11.0.1.30 4台主机主机添加host [rootnginx01 sbin]# cat /etc/hosts 127.0.0.…...
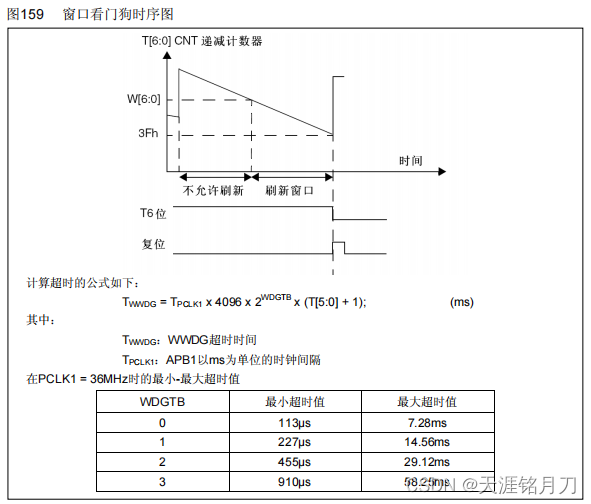
独立看门狗与窗口看门狗
一、简介 STM32F10xxx内置两个看门狗,提供了更高的安全性、时间的精确性和使用的灵活性。两个看门狗设备(独立看门狗和窗口看门狗)可用来检测和解决由软件错误引起的故障;当计数器达到给定的超时值时,触发一个中断(仅适用于窗口型看门狗)或产…...

【CTF杂项】常见文件文件头文件尾格式总结 各类文件头
常见文件文件头文件尾格式总结及各类文件头 以下是常见文件的文件头格式总结及各类文件头的描述: 图像文件: JPEG:文件头格式为FF D8 FF,文件尾格式为FF D9。PNG:文件头格式为89 50 4E 47 0D 0A 1A 0A,文件…...

深度学习-模型转换_所需算力相关
模型转换相关 tensflow转onnx python -m tf2onnx.convert \--graphdef /root/autodl-tmp/warren/text-detection-ctpn/data/ctpn.pb \--output ./model.onnx --inputs Placeholder:0 --outputs Reshape_2:0,rpn_bbox_pred/Reshape_1:0 pytorch转onnx #!/usr/…...

Koordinator 助力云原生应用性能提升:小红书混部技术实践
作者:宋泽辉(小红书)、张佐玮(阿里云) 编者按: Koordinator 是一个开源项目,是基于阿里巴巴内部多年容器调度、混部实践经验孵化诞生,是行业首个生产可用、面向大规模场景的开源混…...
java中如何使用elasticsearch—RestClient操作文档(CRUD)
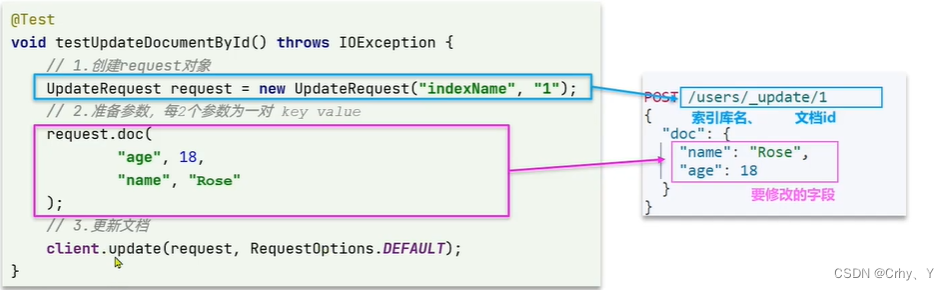
目录 一、案例分析 二、Java代码中操作文档 2.1 初始化JavaRestClient 2.2 添加数据到索引库 2.3 根据id查询数据 2.4 根据id修改数据 2.4 删除操作 三、java代码对文档进行操作的基本步骤 一、案例分析 去数据库查询酒店数据,导入到hotel索引库࿰…...

MySQL自定义函数
MySQL自定义函数 函数与存储过程类似,也是一组预先编译好的SQL语句的集合,但是存储过程可以有0个或多个返回,函数就只能有一个返回 创建函数 #语法 参数列表包含两部分 参数名和参数类型 #函数体必须有return语句 且每个sql语句后要以;结尾 所…...
)
技术学习|CDA level I 数据库应用(数据操作语言DML)
数据操作语言(DML)是对表中记录进行添加、更新、删除等操作的语言。 一、添加数据 在数据表中填充数据有两种方法,第一种方法是使用insert into语句向数据表中直接录入每行数据信息,但并不常用,因为分析使用的数据很…...
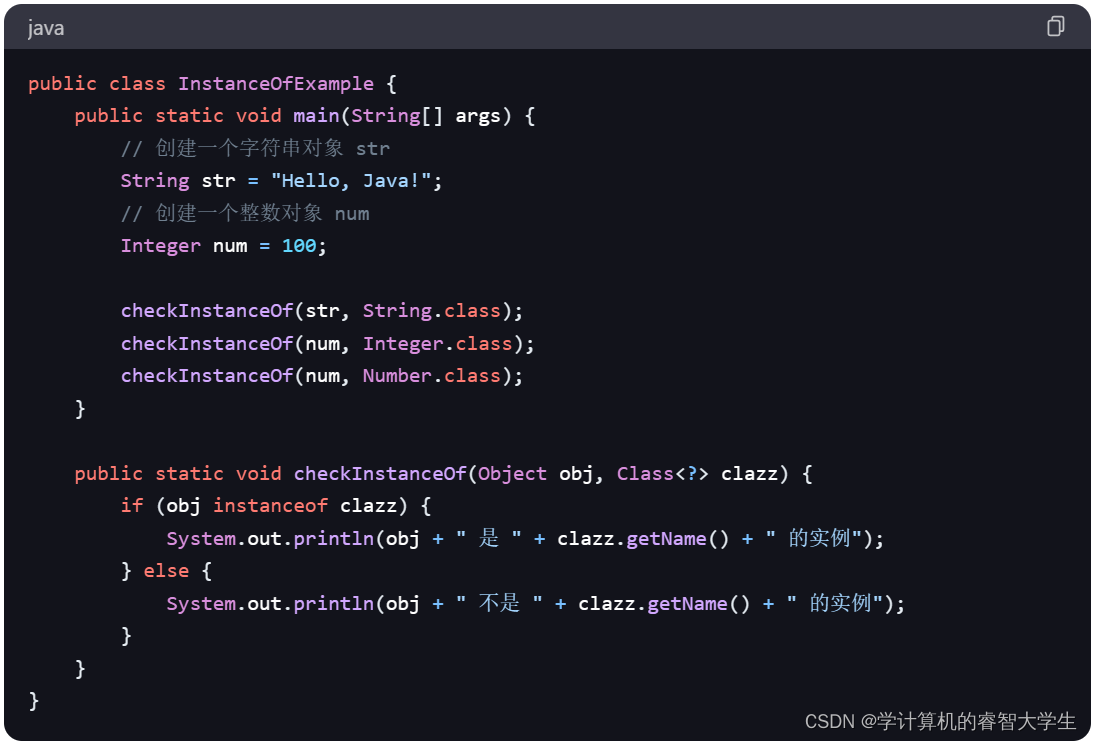
关键字:instanceof关键字
在 Java 中,instanceof关键字用于检查一个对象是否是某个特定类或其子类的实例。它的语法如下: 其中,Object是要检查的对象,Class是要检查的类或接口。 instanceof关键字的返回值是一个布尔值,如果对象Object是类Cla…...

【LeetCode:34. 在排序数组中查找元素的第一个和最后一个位置 | 二分】
🚀 算法题 🚀 🌲 算法刷题专栏 | 面试必备算法 | 面试高频算法 🍀 🌲 越难的东西,越要努力坚持,因为它具有很高的价值,算法就是这样✨ 🌲 作者简介:硕风和炜,…...

【Java学习笔记】Arrays类
Arrays 类 1. 导入包:import java.util.Arrays 2. 常用方法一览表 方法描述Arrays.toString()返回数组的字符串形式Arrays.sort()排序(自然排序和定制排序)Arrays.binarySearch()通过二分搜索法进行查找(前提:数组是…...

【解密LSTM、GRU如何解决传统RNN梯度消失问题】
解密LSTM与GRU:如何让RNN变得更聪明? 在深度学习的世界里,循环神经网络(RNN)以其卓越的序列数据处理能力广泛应用于自然语言处理、时间序列预测等领域。然而,传统RNN存在的一个严重问题——梯度消失&#…...
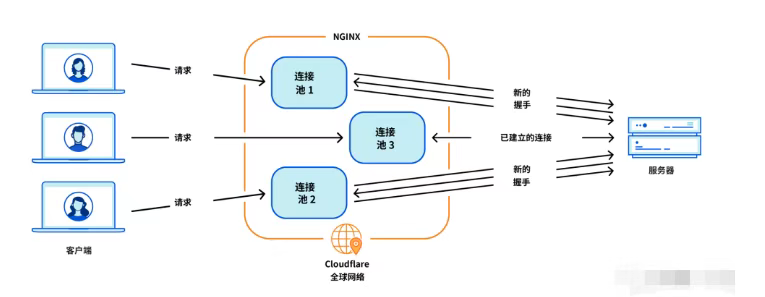
Cloudflare 从 Nginx 到 Pingora:性能、效率与安全的全面升级
在互联网的快速发展中,高性能、高效率和高安全性的网络服务成为了各大互联网基础设施提供商的核心追求。Cloudflare 作为全球领先的互联网安全和基础设施公司,近期做出了一个重大技术决策:弃用长期使用的 Nginx,转而采用其内部开发…...
)
是否存在路径(FIFOBB算法)
题目描述 一个具有 n 个顶点e条边的无向图,该图顶点的编号依次为0到n-1且不存在顶点与自身相连的边。请使用FIFOBB算法编写程序,确定是否存在从顶点 source到顶点 destination的路径。 输入 第一行两个整数,分别表示n 和 e 的值(1…...
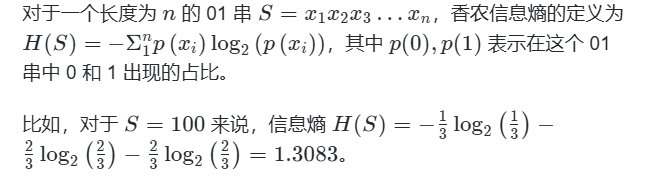
蓝桥杯3498 01串的熵
问题描述 对于一个长度为 23333333的 01 串, 如果其信息熵为 11625907.5798, 且 0 出现次数比 1 少, 那么这个 01 串中 0 出现了多少次? #include<iostream> #include<cmath> using namespace std;int n 23333333;int main() {//枚举 0 出现的次数//因…...

laravel8+vue3.0+element-plus搭建方法
创建 laravel8 项目 composer create-project --prefer-dist laravel/laravel laravel8 8.* 安装 laravel/ui composer require laravel/ui 修改 package.json 文件 "devDependencies": {"vue/compiler-sfc": "^3.0.7","axios": …...

Java编程之桥接模式
定义 桥接模式(Bridge Pattern)属于结构型设计模式,它的核心意图是将抽象部分与实现部分分离,使它们可以独立地变化。这种模式通过组合关系来替代继承关系,从而降低了抽象和实现这两个可变维度之间的耦合度。 用例子…...
处理vxe-table 表尾数据是单独一个接口,表格tableData数据更新后,需要点击两下,表尾才是正确的
修改bug思路: 分别把 tabledata 和 表尾相关数据 console.log() 发现 更新数据先后顺序不对 settimeout延迟查询表格接口 ——测试可行 升级↑:async await 等接口返回后再开始下一个接口查询 ________________________________________________________…...

08. C#入门系列【类的基本概念】:开启编程世界的奇妙冒险
C#入门系列【类的基本概念】:开启编程世界的奇妙冒险 嘿,各位编程小白探险家!欢迎来到 C# 的奇幻大陆!今天咱们要深入探索这片大陆上至关重要的 “建筑”—— 类!别害怕,跟着我,保准让你轻松搞…...
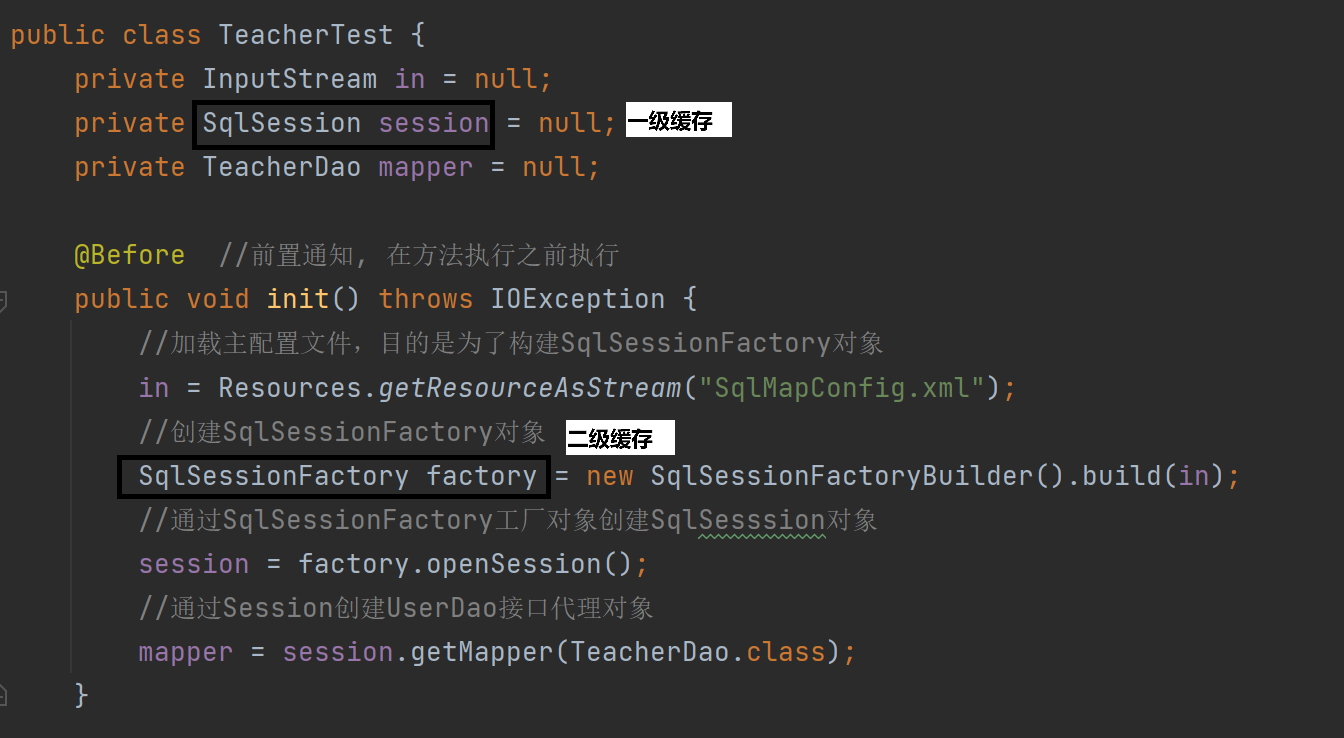
MyBatis中关于缓存的理解
MyBatis缓存 MyBatis系统当中默认定义两级缓存:一级缓存、二级缓存 默认情况下,只有一级缓存开启(sqlSession级别的缓存)二级缓存需要手动开启配置,需要局域namespace级别的缓存 一级缓存(本地缓存&#…...