docker_ROS的usb_cam使用与标定
目录
准备
准备标定板
新建容器
新建usb_cam话题的ROS功能包
编写代码
编译
运行功能包
标定
安装camera_calibration标定功能包
启动发布usb_cam话题的功能包
启动camera_calibration标定功能包
准备
usb相机
标定板
一个带有ROS的docker镜像。
准备标定板
图片链接:
棋盘格图片
打印粘贴。或者可以使用手机平板等屏幕展示这张棋盘照片,测量棋盘小格尺寸,并保证标定过程中,图片不被缩放。
新建容器
使用--privileged参数建立镜像。基础的代码:
sudo docker run -it --privileged --name=lab1 your_image_name /bin/bash修改 your_image_name为你的docker镜像名。--privileged参数使容器与宿主机共用device设备,有相同的/dev文件。但是,在进入容器之前,先连接相机,再进入容器,防止进入容器后刷新不出相机。
docker run的其他参数根据需要自行设置。
连接相机
进入容器
新建usb_cam话题的ROS功能包
新建ROS功能包,用来发布usb_cam的话题。
编写代码
使用C++语言编写,示例如下,
新建功能包,而后写入核心代码:
img_publisher.cpp文件
#include <ros/ros.h>
#include <image_transport/image_transport.h>
#include <opencv2/highgui.hpp>
#include <opencv2/calib3d.hpp>
#include <cv_bridge/cv_bridge.h>
#include <iostream>int main(int argc, char** argv) {ros::init(argc, argv, "img_publisher");ros::NodeHandle nh;image_transport::ImageTransport it(nh);image_transport::Publisher pub = it.advertise("camera/image", 1);cv::VideoCapture cap;cv::Mat frame;int deviceID = 0;if (argc > 1)deviceID = argv[1][0] - '0';int apiID = cv::CAP_ANY;cap.open(deviceID + apiID);if (!cap.isOpened()) {std::cerr << "ERROR! Unable to open camera" << std::endl;return -1;}ros::Rate loop_rate(30);while (nh.ok()) {cap.read(frame);if (!frame.empty()) {sensor_msgs::ImagePtr msg = cv_bridge::CvImage(std_msgs::Header(), "bgr8", frame).toImageMsg();pub.publish(msg);}ros::spinOnce();loop_rate.sleep();}return 0;
}CMakeLists.txt文件
cmake_minimum_required(VERSION 3.0.2)
project(usb_cam)## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTScv_bridgeimage_transportroscppsensor_msgsstd_msgs
)
find_package(OpenCV REQUIRED)
message(${OpenCV_VERSION})###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES usb_cam
# CATKIN_DEPENDS cv_bridge image_transport roscpp sensor_msgs std_msgs
# DEPENDS system_lib
)###########
## Build ##
############# Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
# include${catkin_INCLUDE_DIRS}${OpenCV_INCLUDE_DIRS}
)add_executable(img_publisher src/img_publisher.cpp)
add_executable(img_viewer src/img_viewer.cpp)target_link_libraries(img_publisher ${catkin_LIBRARIES} ${OpenCV_LIBS})
target_link_libraries(img_viewer ${catkin_LIBRARIES} ${OpenCV_LIBS})编译
打开终端:
catkin_make在~/.bashrc加入环境变量。
打开终端:
gedit ~/.bashrc文末写入
source ~/catkin_ws/devel/setup.bash
保存文件,关闭。
运行功能包
打开终端:
rosrun usb_cam img_publisher会发布一个话题
查看话题
rostopic list
正常接入相机,功能包才正常运行,此时会出现包括/camera/image话题等一系列话题。
标定
安装camera_calibration标定功能包
查看ROS的功能包:
rospack list查看是否有“camera_calibration”功能包,没有则需要安装:
rosdep install camera_calibration启动发布usb_cam话题的功能包
打开终端:
rosrun usb_cam img_publisher查看话题
rostopic list
正常接入相机,功能包才正常运行,此时会出现包括/camera/image话题等一系列话题。
启动camera_calibration标定功能包
打开终端:
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.20 image:=/camera/image其中, --size 8x6是棋盘交点的数量,9*7的格子就会有8*6个交点
--square 0.20是一个小棋盘格大小,单位:米。
image:=/camera/image,image:=相机话题名。
正常启动后,弹出标定窗口,间断地调整相机位置,直到右侧"calibrate"按钮亮起,
Moving the Checkerboard
In order to get a good calibration you will need to move the checkerboard around in the camera frame such that:
checkerboard on the camera's left, right, top and bottom of field of view
X bar - left/right in field of view
Y bar - top/bottom in field of view
Size bar - toward/away and tilt from the camera
checkerboard filling the whole field of view
checkerboard tilted to the left, right, top and bottom (Skew)At each step, hold the checkerboard still until the image is highlighted in the calibration window.
移动棋盘
为了获得良好的校准,您需要在相机框架中移动棋盘,以便:
相机视野左、右、上、下的棋盘
X条-视野中的左/右
Y条-视野中的顶部/底部
尺寸条-朝向/远离相机并倾斜
棋盘填充整个视野
向左、右、上、下倾斜的棋盘(倾斜)
在每一步中,保持棋盘静止,直到图像在校准窗口中高亮显示。
点击,开始计算。计算结束后"save"按钮亮起,结果点"save"按钮保存
If you are satisfied with the calibration, click COMMIT to send the calibration parameters to the camera for permanent storage. The GUI exits and you should see "writing calibration data to ..." in the console.
如果您对校准感到满意,请单击COMMIT将校准参数发送到相机以进行永久存储。GUI退出,您应该在控制台中看到“正在将校准数据写入…”。
参考
标定过程及参数:
相机内参标定究竟标了什么?相机内参外参保姆级教程 - 知乎
camera_calibration标定功能包介绍:
camera_calibration/Tutorials/MonocularCalibration - ROS Wiki
相关文章:

docker_ROS的usb_cam使用与标定
目录 准备 准备标定板 新建容器 新建usb_cam话题的ROS功能包 编写代码 编译 运行功能包 标定 安装camera_calibration标定功能包 启动发布usb_cam话题的功能包 启动camera_calibration标定功能包 准备 usb相机 标定板 一个带有ROS的docker镜像。 准备标定板 图…...

记一次RabbitMQ服务器异常断电之后,服务重启异常的处理过程
转载说明:如果您喜欢这篇文章并打算转载它,请私信作者取得授权。感谢您喜爱本文,请文明转载,谢谢。 问题描述: 机房突然停电,rabbitmq的主机异常断电,集群服务全部需要重启。但是在执行service…...
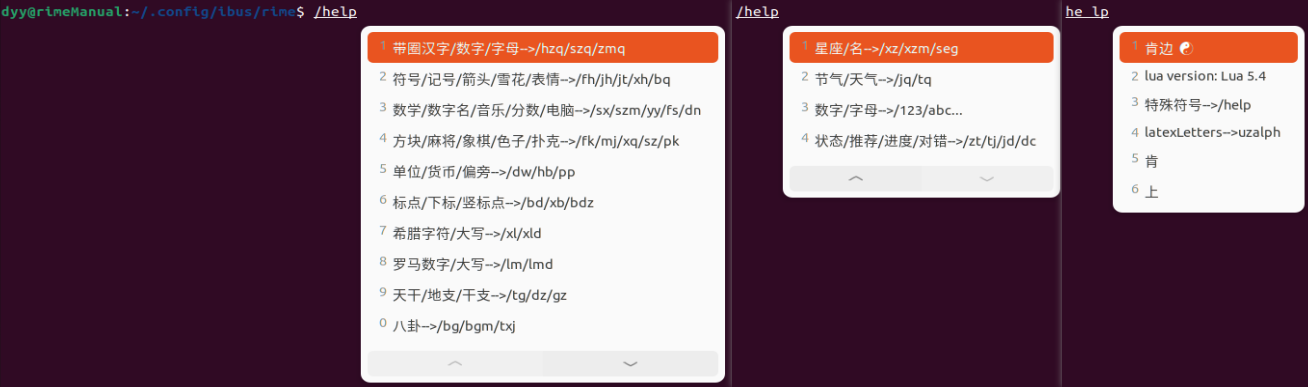
rime中州韵小狼毫 help lua Translator 帮助消息翻译器
lua 是 Rime中州韵/小狼毫输入法强大的武器,掌握如何在Rime中州韵/小狼毫中使用lua,你将体验到什么叫 随心所欲。 先看效果 在 rime中州韵 输入效果一览 中的 👇 help效果 一节中, 我们看到了在Rime中州韵/小狼毫输入法中输入 h…...

C++完成使用map Update数据 二进制数据
1、在LXMysql.h和LXMysql.cpp分别定义和编写关于pin语句的代码 //获取更新数据的sql语句 where语句中用户要包含where 更新std::string GetUpdatesql(XDATA kv, std::string table, std::string where); std::string LXMysql::GetUpdatesql(XDATA kv, std::string table, std…...

ARCGIS PRO SDK 访问Geometry对象
一、Geometry常用对象 二、主要类 1、ReadOnlyPartCollection:Polyline 和 Polygon 使用的 ReadOnlySegmentCollection 部件的只读集合,属性成员: 名字描述Count获取 ICollection 中包含的元素数。TIEM获取位于指定索引处的元素。Spatial…...
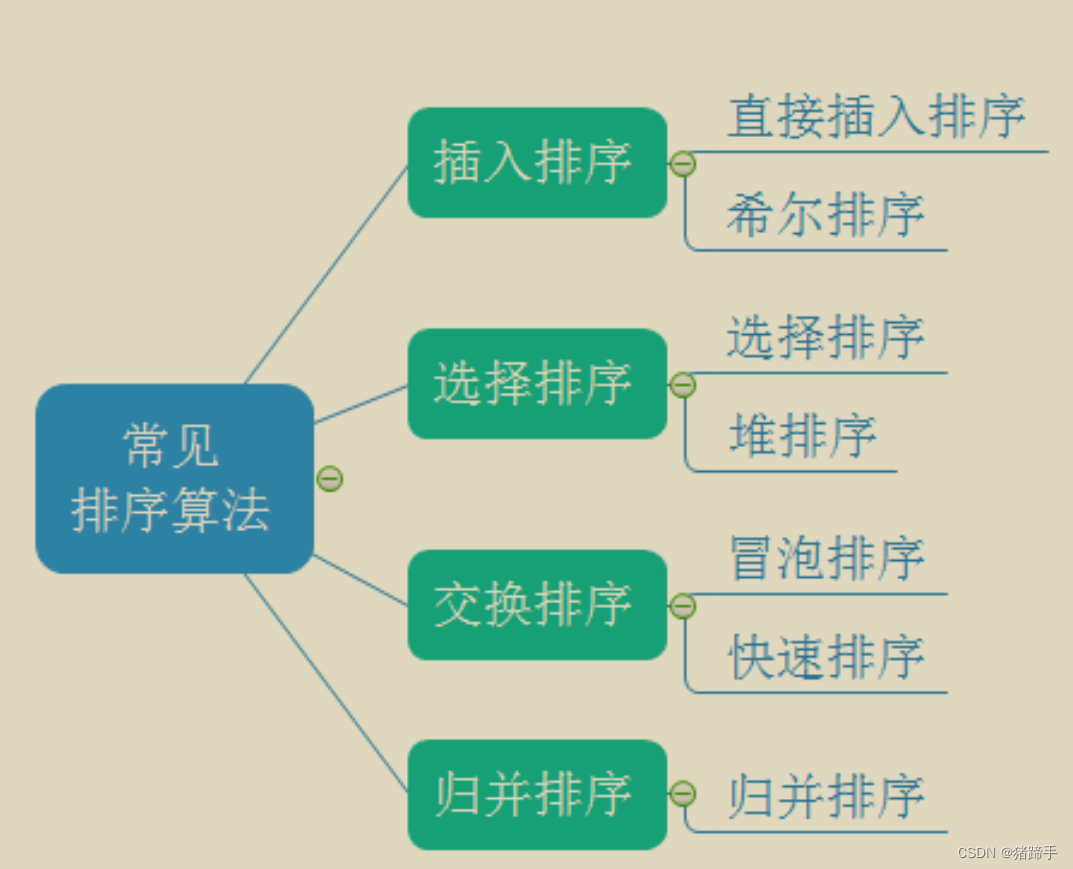
数据结构之各大排序(C语言版)
我们这里话不多说,排序重要性大家都很清楚,所以我们直接开始。 我们就按照这张图来一一实现吧! 一.直接插入排序与希尔排序. 这个是我之前写过的内容了,大家可以通过链接去看看详细内容。 算法之插入排序及希尔排序(…...

c++ 中多线程的使用
如果你的其他逻辑必须在线程 t1 和 t2 之后执行,但你又希望这些线程能够同时运行,你可以在主线程中使用 std::thread::detach 将线程分离,让它们在后台运行。这样,主线程不会等待这些线程的完成,而可以继续执行其他逻辑…...
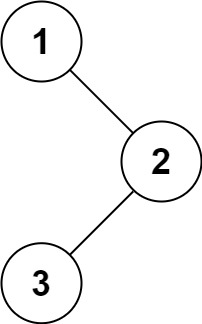
理解二叉树的遍历(算法村第七关白银挑战)
二叉树的前序遍历 144. 二叉树的前序遍历 - 力扣(LeetCode) 给你二叉树的根节点 root ,返回它节点值的 前序 遍历。 示例 1: 输入:root [1,null,2,3] 输出:[1,2,3]解 LeetCode以及面试中提供的方法可能…...
所有单片机使用的汇编语言是统一的吗?
所有单片机使用的汇编语言是统一的吗? 在开始前我有一些资料,是我根据网友给的问题精心整理了一份「单片机的资料从专业入门到高级教程」, 点个关注在评论区回复“888”之后私信回复“888”,全部无偿共享给大家!&…...
C ++类
定义一个Person类,私有成员int age,string &name,定义一个Stu类,包含私有成员double *score,写出两个类的构造函数、析构函数、拷贝构造和拷贝赋值函数,完成对Person的运算符重载(算术运算符、条件运算…...
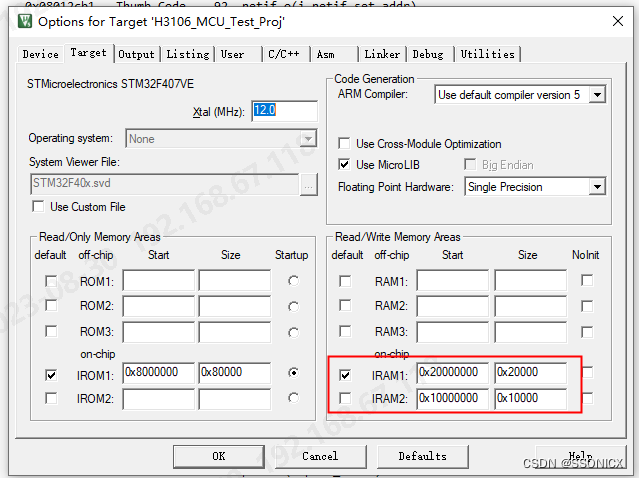
STM32疑难杂症
1.keil的奇怪问题 创建的数组分配内存到0x10000000地址的时候,数据总是莫名其妙的出现问题,取消勾选就正常了 stm32f407内部有一个CCM内存,这部分内存只能由内核控制,任何外设都不能够进行访问。这样问题就来了,如果使…...

GIT使用简介
Git 是一种版本控制系统,常用于团队协作开发和管理代码。下面是 Git 的基本使用方式: 安装 Git:首先,在你的计算机上安装 Git。你可以从 Git 官方网站(https://git-scm.com/)下载适合你操作系统的版本&…...

easycode 插件配置文件
easycode是一个idea生成文件的插件,以下是我的一个项目中配置信息,需要的可以拿走,保存成json文件导入即可 {"author" : "XXX","version" : "1.2.8","userSecure" : "","…...
elasticsearch系列四:集群常规运维
概述 在使用es中如果遇到了集群不可写入或者部分索引状态unassigned,明明写入了很多数据但是查不到等等系列问题该怎么办呢?咱们今天一起看下常用运维命令。 案例 起初我们es性能还跟得上,随着业务发展壮大,发现查询性能越来越不…...
)
6.6 会话与输入事件(三)
三,Pointer会话 3.1 Pointer会话及其属性 指针输入会话使用SCREEN_EVENT_POINTER类型创建,通常用于控制光标的形状和位置。 指针会话的SCREEN_PROPERTY_MODE属性未使用。但是,可以使用下面的会话属性配置指针会话: SCREEN_PROPERTY_ACCELERATION表示一组六个整数,表示x…...

【自动化测试总结】优点、场景、流程、项目人员构成
一、自动化测试的概念 以程序测试程序,以代码代替思维,以脚本的运行代替手工测试,可以大大提高工作测试的效率。 二、自动化测试的优点 1.回归测试更为方便,可靠。自动化测试最主要的任务和特点,特别是在程序修改比较…...
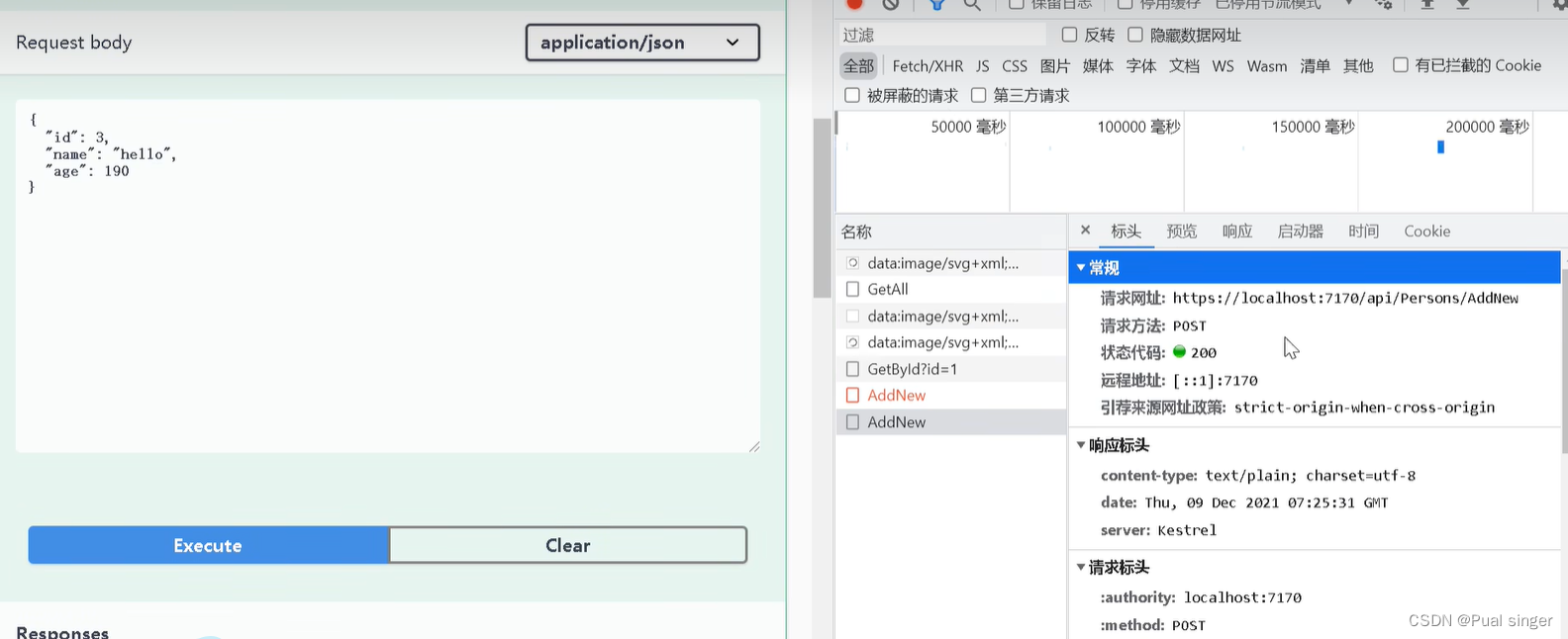
杨中科 ASP.NETCore Rest
什么是Rest RPC 1、Web API两种风格: 面向过程(RPC) 、面向REST (REST) 2、RPC:“控制器/操作方法“的形式把服务器端的代码当成方法去调用。把HTTP当成传输数据的通道,不关心HTTP谓词。通过QueryString请求报文体给服务器传递数据。状态码。比如/Persons/GetAll…...

RTU数据采集终端
在现代工业控制系统中,数据采集是一个至关重要的步骤。RTU(远程终端单元)作为一种常用的数据采集终端设备,不仅可以实现数据的采集和传输,还可以实现现场设备的远程监控和控制。 一、RTU数据采集终端的工作原理 RTU数据采集终端是一种将现场…...

双指针--- 数组元素的目标和
目录 数组元素的目标和思路:暴力做法思路:双指针做法: 代码: 原题链接 数组元素的目标和 给定两个升序排序的有序数组 A 和 B ,以及一个目标值 x 。 数组下标从 0 开始。 请你求出满足 A[i]B[j]x 的数对 (i,j) 。 数据保证有唯…...
你的网站或许不需要前端构建(二)
前一阵,有朋友问我,能否在不进行前端编译构建的情况下,用现代语法开发网站界面。 于是,就有了这篇文章中提到的方案。 写在前面 这篇文章,依旧不想讨论构建或不构建,哪一种方案对开发更友好,…...

谷歌浏览器插件
项目中有时候会用到插件 sync-cookie-extension1.0.0:开发环境同步测试 cookie 至 localhost,便于本地请求服务携带 cookie 参考地址:https://juejin.cn/post/7139354571712757767 里面有源码下载下来,加在到扩展即可使用FeHelp…...

HTML 语义化
目录 HTML 语义化HTML5 新特性HTML 语义化的好处语义化标签的使用场景最佳实践 HTML 语义化 HTML5 新特性 标准答案: 语义化标签: <header>:页头<nav>:导航<main>:主要内容<article>&#x…...
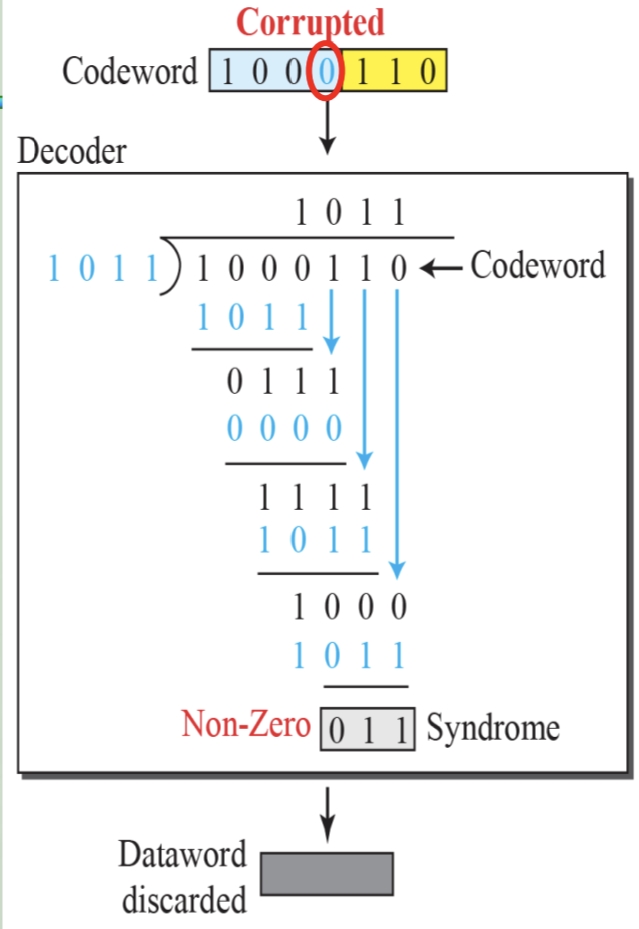
循环冗余码校验CRC码 算法步骤+详细实例计算
通信过程:(白话解释) 我们将原始待发送的消息称为 M M M,依据发送接收消息双方约定的生成多项式 G ( x ) G(x) G(x)(意思就是 G ( x ) G(x) G(x) 是已知的)࿰…...

FastAPI 教程:从入门到实践
FastAPI 是一个现代、快速(高性能)的 Web 框架,用于构建 API,支持 Python 3.6。它基于标准 Python 类型提示,易于学习且功能强大。以下是一个完整的 FastAPI 入门教程,涵盖从环境搭建到创建并运行一个简单的…...

Golang dig框架与GraphQL的完美结合
将 Go 的 Dig 依赖注入框架与 GraphQL 结合使用,可以显著提升应用程序的可维护性、可测试性以及灵活性。 Dig 是一个强大的依赖注入容器,能够帮助开发者更好地管理复杂的依赖关系,而 GraphQL 则是一种用于 API 的查询语言,能够提…...

2025盘古石杯决赛【手机取证】
前言 第三届盘古石杯国际电子数据取证大赛决赛 最后一题没有解出来,实在找不到,希望有大佬教一下我。 还有就会议时间,我感觉不是图片时间,因为在电脑看到是其他时间用老会议系统开的会。 手机取证 1、分析鸿蒙手机检材&#x…...

智能分布式爬虫的数据处理流水线优化:基于深度强化学习的数据质量控制
在数字化浪潮席卷全球的今天,数据已成为企业和研究机构的核心资产。智能分布式爬虫作为高效的数据采集工具,在大规模数据获取中发挥着关键作用。然而,传统的数据处理流水线在面对复杂多变的网络环境和海量异构数据时,常出现数据质…...

2025季度云服务器排行榜
在全球云服务器市场,各厂商的排名和地位并非一成不变,而是由其独特的优势、战略布局和市场适应性共同决定的。以下是根据2025年市场趋势,对主要云服务器厂商在排行榜中占据重要位置的原因和优势进行深度分析: 一、全球“三巨头”…...

腾讯云V3签名
想要接入腾讯云的Api,必然先按其文档计算出所要求的签名。 之前也调用过腾讯云的接口,但总是卡在签名这一步,最后放弃选择SDK,这次终于自己代码实现。 可能腾讯云翻新了接口文档,现在阅读起来,清晰了很多&…...

探索Selenium:自动化测试的神奇钥匙
目录 一、Selenium 是什么1.1 定义与概念1.2 发展历程1.3 功能概述 二、Selenium 工作原理剖析2.1 架构组成2.2 工作流程2.3 通信机制 三、Selenium 的优势3.1 跨浏览器与平台支持3.2 丰富的语言支持3.3 强大的社区支持 四、Selenium 的应用场景4.1 Web 应用自动化测试4.2 数据…...