【AI视野·今日Robot 机器人论文速览 第六十七期】Mon, 1 Jan 2024
AI视野·今日CS.Robotics 机器人学论文速览
Mon, 1 Jan 2024
Totally 16 papers
👉上期速览✈更多精彩请移步主页
Daily Robotics Papers
| MURP: Multi-Agent Ultra-Wideband Relative Pose Estimation with Constrained Communications in 3D Environments Authors Andrew Fishberg, Brian Quiter, Jonathan P. How 对于在缺乏外部定位基础设施或先验环境知识的情况下运行的许多多机器人系统来说,代理间相对定位至关重要。我们提出了一种新颖的代理间相对 3D 姿态估计系统,其中每个参与代理都配备了多个超宽带 UWB 测距标签。之前的工作通常会用额外的连续传输数据(例如里程计)来补充嘈杂的 UWB 范围测量,从而导致团队规模增加和/或通信网络能力下降带来潜在的扩展问题。通过为每个代理配备多个 UWB 天线,我们的方法仅使用本地收集的 UWB 范围测量值、先验状态约束以及对何时违反所述约束的检测来解决这些问题。利用我们学到的平均测距偏差校正,我们获得了 19 的位置误差改进,实验平均绝对位置和航向误差分别为 0.24m 和 9.5 度。与其他最先进的方法相比,我们的工作展示了比类似系统更高的性能,同时与通信成本显着更高的方法保持竞争力。 |
| Vocalics in Human-Drone Interaction Authors Marc Lieser, Ulrich Schwanecke 随着飞行机器人在商业和私营部门的持续增长,有必要了解与人类非语言互动的适当方法。虽然视觉线索(例如纳入轨迹的手势)更加明显且经过彻底研究,但声音线索仍未得到探索,尽管它们具有增强人类无人机互动的潜力。鉴于额外的视听和感官设备并不总是理想或可行的,并且飞行噪音常常掩盖旋翼无人机中潜在的声学通信(例如通过扬声器),旋翼本身提供了非语言通信的潜力。在本文中,四旋翼飞行器轨迹通过声学信息进行了增强,这些信息不会在视觉上影响飞行,但添加了可显着促进独特性的听觉信息。一项用户研究 N 192 表明,通过声波增强两个空中手势的轨迹可以使它们更容易区分。 |
| Grasping, Part Identification, and Pose Refinement in One Shot with a Tactile Gripper Authors Joyce Xin Yan Lim, Quang Cuong Pham 增材制造的兴起带来了独特的机遇和挑战。可以轻松实现 3D 打印 3DP 特有的零件设计快速变更和大规模零件定制。独特但具有相似功能的定制零件(例如牙科模具、鞋垫或发动机叶片)可以使用 3DP 进行工业制造。然而,大规模零件定制的机会给机器人应用的现有生产范式带来了独特的挑战,因为当前用于零件识别和姿态细化的机器人范式是重复的,通常使用数据驱动和对象相关的方法。因此,涉及大规模定制的 3DP 零件的机器人应用存在瓶颈,因为基于特征的深度学习方法很难区分相似的零件,例如属于不同人的鞋垫。因此,我们提出了一种增强 3DP 零件上的图案的方法,以便可以使用触觉夹具一次性执行抓取、零件识别和姿势细化。 |
| b-it-bots RoboCup@Work Team Description Paper 2023 Authors Kevin Patel, Vamsi Kalagaturu, Vivek Mannava, Ravisankar Selvaraju, Shubham Shinde, Dharmin Bakaraniya, Deebul Nair, Mohammad Wasil, Santosh Thoduka, Iman Awaad, Sven Schneider, Nico Hochgeschwender, Paul G. Pl ger 本文介绍了 b it bots RoboCup 工作团队及其当前的 KUKA youBot 机器人硬件和功能架构。我们描述了在工业环境中运行所需的底层软件框架和开发的功能,包括可靠和精确的导航、灵活的操作、强大的对象识别和任务规划等功能。 |
| Developing Flying Explorer for Autonomous Digital Modelling in Wild Unknowns Authors Naizhong Zhang. Yaoqiang Pan, Yangwen Jin, Peiqi Jin, Kewei Hu, Xiao Huang, Hanwen Kang 这项工作为机器人里程计、路径规划和野外未知环境中的探索提供了一种创新的解决方案,重点是数字建模。该方法使用具有伪随机生成目标的最小成本公式,集成多路径规划和评估,重点是基于可行的兴趣边界完全覆盖未知地图。该评估在具有轻型 3D LiDAR 传感器模型的机器人平台上进行,评估了探索完全未知的地下区域的一致性和效率。该算法允许动态改变所需的目标和行为。同时,本文详细介绍了 AREX 的设计,强调其强大的定位、测绘和高效的勘探目标选择能力,重点关注勘探方向的连续性,以提高效率并减少里程计误差。 |
| Adaptive Control Strategy for Quadruped Robots in Actuator Degradation Scenarios Authors Xinyuan Wu, Wentao Dong, Hang Lai, Yong Yu, Ying Wen 四足机器人对极端环境的适应能力很强,但也可能出现故障。一旦出现这些故障,机器人就必须修复才能返回任务,降低了其实际可行性。这些故障中普遍存在的一个问题是执行器性能下降,这是由设备老化或意外操作事件等因素引起的。传统上,解决这个问题在很大程度上依赖于复杂的容错设计,这需要开发人员深厚的领域专业知识,并且缺乏通用性。基于学习的方法提供了减轻这些限制的有效方法,但在现实世界的四足机器人上有效部署此类方法方面存在研究空白。本文介绍了一种植根于强化学习的开创性师生框架,名为执行器退化适应变压器 ADAPT,旨在解决这一研究空白。该框架产生了统一的控制策略,使机器人能够在关节执行器突然出现故障的情况下维持其运动并执行任务,完全依靠其内部传感器。 |
| Unified Task and Motion Planning using Object-centric Abstractions of Motion Constraints Authors Alejandro Agostini, Justus Piater 在任务和运动规划 TAMP 中,任务规划方法使用的抽象描述的模糊性和不确定性使得难以表征成功执行任务所需的物理约束。通常的方法是在任务规划级别忽略此类约束,并实施昂贵的子符号几何推理技术,对不可行的操作执行多次调用、计划修正和重新规划,直到找到可行的解决方案。我们提出了另一种 TAMP 方法,将任务和运动规划统一到单个启发式搜索中。我们的方法基于以对象为中心的运动约束抽象,允许利用现成的人工智能启发式搜索的计算效率来产生物理上可行的计划。 |
| Exploring Deep Reinforcement Learning for Robust Target Tracking using Micro Aerial Vehicles Authors Alberto Dionigi, Mirko Leomanni, Alessandro Saviolo, Giuseppe Loianno, Gabriele Costante 自主跟踪非合作目标的能力是微型飞行器的关键技术要求。在本文中,我们提出了一种基于深度强化学习的输出反馈控制方案,用于控制微型飞行器在保持视觉接触的同时持续跟踪飞行目标。所提出的方法利用相对位置数据进行控制,放宽了文献中相关方法典型的访问完整状态信息的假设。此外,我们通过域随机化在学习过程中利用经典的稳健性指标来提高学习策略的稳健性。实验结果验证了所提出的目标跟踪方法,证明了在质量失配和控制延迟方面的高性能和鲁棒性。 |
| LiDAR Odometry Survey: Recent Advancements and Remaining Challenges Authors Dongjae Lee, Minwoo Jung, Wooseong Yang, Ayoung Kim 里程计对于机器人导航至关重要,特别是在全球定位系统 GPS 等全球定位方法不可用的情况下。里程计的主要目标是预测机器人的运动并准确确定其当前位置。机器人中的里程计使用各种传感器,例如车轮编码器、惯性测量单元 IMU、摄像头、雷达以及光检测和测距 LiDAR。 LiDAR 尤其因其提供丰富的三维 3D 数据和不受光变化影响的能力而受到关注。这项调查旨在彻底检查激光雷达里程计的进展。我们首先探索 LiDAR 技术,然后仔细研究 LiDAR 里程计工作,并根据传感器集成方法对它们进行分类。这些方法包括仅依赖 LiDAR 的方法、将 LiDAR 与 IMU 相结合的方法、涉及多个 LiDAR 的策略以及将 LiDAR 与其他传感器模式融合的方法。总之,我们解决了激光雷达里程计中现有的挑战并概述了潜在的未来方向。此外,我们还分析了 LiDAR 里程计的公共数据集和评估方法。 |
| Efficient optimization-based trajectory planning Authors Jiayu Fan, Nikolce Murgovski, Jun Liang 本研究提出了一种基于统一优化的规划框架,可解决受控对象在受限区域内精确有效的导航,同时应对障碍物。我们重点处理两个碰撞避免问题,即物体不与障碍物碰撞以及不与约束区域的边界碰撞。物体或障碍物被表示为凸多面体和椭球体的并集,并且约束区域被表示为这些凸集的交集。使用这些表示,可以通过制定分离两个凸集的显式约束或确保一个凸集包含在另一个凸集中(分别称为分离约束和包含约束)来实现碰撞避免。我们建议使用超平面分离定理来制定可微分离约束,并利用S过程和几何方法来制定平滑包含约束。我们指出,与现有技术相比,所提出的公式可以大大减少用于制定防撞约束的辅助变量的非线性程序大小和基于几何的初始化。最后,在两种情况下评估所提出的统一规划框架的有效性:牵引拖车的自动停车和弯道超车。 |
| Assisted Path Planning for a UGV-UAV Team Through a Stochastic Network Authors Abhay Singh Bhadoriya, Sivakumar Rathinam, Swaroop Darbha, David W. Casbeer, Satyanarayana G. Manyam 在本文中,我们考虑随机环境中的多智能体路径规划问题。环境可以是城市道路网络,由图表表示,其中由于交通拥堵,所选路段阻碍边缘的行驶时间是随机变量。无人地面车辆 UGV 希望从出发地点行驶到目的地,同时最大限度地缩短到达目的地的时间。 UGV 可以穿过有阻碍的边缘,但真正的行驶时间只能在该边缘的末端实现。这意味着 UGV 可能会卡在有阻碍的边缘,且行驶时间较长。支援车辆(例如无人机)从其起始位置同时部署,通过检查和了解障碍边缘的真实成本来协助 UGV。利用无人机的更新信息,UGV 可以有效地重新路由其到达目的地的路径。 UGV不会随时等待到达目的地。允许无人机在任何顶点终止其路径。我们的目标是开发一种在线算法,根据当前信息确定 UGV 和无人机的有效路径,以便 UGV 在最短的时间内到达目的地。我们将此问题称为随机辅助路径规划 SAPP。我们提出了用于 UGV 规划的动态 k 最短路径规划 D KSPP 算法和用于 UAV 规划的农村邮递员问题 RPP 公式。由于 RPP 的可扩展性挑战,我们还为无人机规划提出了一种基于启发式的优先级分配算法 PAA。 |
| Enhancing the Performance of DeepReach on High-Dimensional Systems through Optimizing Activation Functions Authors Qian Wang, Tianhao Wu 随着自主系统的不断进步,为安全关键系统提供强大的安全保障变得至关重要。汉密尔顿雅可比可达性分析是一种形式验证方法,可保证动力系统的性能和安全性,广泛适用于各种任务和挑战。传统上,可达性问题是通过使用基于网格的方法来解决的,其计算和内存成本随着系统的维度呈指数级增长。为了克服这一挑战,DeepReach 被提出,这是一种基于深度学习的方法,可以近似解决高维可达性问题,并显示出很大的前景。在本文中,我们的目标是通过探索激活函数的不同选择来提高 DeepReach 在高维系统上的性能。我们首先在 3D 系统上进行实验作为概念验证。 |
| Exact Consistency Tests for Gaussian Mixture Filters using Normalized Deviation Squared Statistics Authors Nisar Ahmed, Luke Burks, Kailah Cabral, Alyssa Bekai Rose 我们考虑评估离散时间概率滤波器的动态一致性问题,该滤波器用高斯混合近似随机系统状态密度。动态一致性意味着估计的概率分布正确地描述了实际的不确定性。因此,在估计器调整和验证的应用中自然会出现一致性测试的问题。然而,由于所涉及的密度函数普遍复杂,基于混合的估计器的一致性测试的直接方法仍然难以定义和实施。本文在归一化偏差平方 NDS 统计框架内得出了高斯混合一致性检验的新精确结果。结果表明,通用多元高斯混合模型的 NDS 检验统计量完全遵循广义卡方分布的混合,对此可以使用高效的计算工具。 |
| Automatic laminectomy cutting plane planning based on artificial intelligence in robot assisted laminectomy surgery Authors Zhuofu Li, Yonghong Zhang, Chengxia Wang, Shanshan Liu, Xiongkang Song, Xuquan Ji, Shuai Jiang, Woquan Zhong, Lei Hu, Weishi Li 目的本研究旨在利用人工智能实现椎板切除术的自动规划,并验证该方法。方法 我们提出了一种自动椎板切除术切割平面规划的两阶段方法。第一阶段是识别关键点。每张CT图像上手动标记7个关键点。利用我们开发的空间金字塔上采样网络SPU Net算法来精确定位7个关键点。第二阶段,基于关键点的识别,为每个椎骨生成个性化的坐标系。最后在坐标系下生成椎板切除的横向和纵向切割平面。对规划的总体效果进行了评价。结果第一阶段SPU Net算法对7个关键点的平均定位误差为0.65mm。第二阶段,算法总共规划了320个横向剖切面和640个纵向剖切面。其中,A、B、C级水平面规划效应数分别为318 99.38个、1 0.31个、1 0.31个。 A、B、C级的纵向规划效应分别为622 97.18 、1 0.16 、17 2.66 。结论在本研究中,我们提出了一种基于CT图像关键点定位的椎板切除术自动手术路径规划方法。结果表明该方法取得了满意的结果。 |
| TimePillars: Temporally-Recurrent 3D LiDAR Object Detection Authors Ernesto Lozano Calvo, Bernardo Taveira, Fredrik Kahl, Niklas Gustafsson, Jonathan Larsson, Adam Tonderski 应用于激光雷达点云的物体检测是机器人技术中的一项相关任务,特别是在自动驾驶中。单帧方法在该领域占主导地位,利用来自各个传感器扫描的信息。最近的方法以相对较短的推理时间实现了良好的性能。然而,考虑到 LiDAR 数据固有的高度稀疏性,这些方法在长距离检测中遇到困难,例如: 200m,我们认为这对于实现安全自动化至关重要。聚合多个扫描不仅会产生更密集的点云表示,而且还为系统带来时间感知,并提供有关环境如何变化的信息。然而,此类解决方案通常是高度特定于问题的,需要仔细的数据处理,并且往往无法满足运行时要求。在这种情况下,我们提出了 TimePillars,一种时间循环对象检测管道,它利用跨时间 LiDAR 数据的支柱表示,尊重硬件集成效率限制,并利用新颖的 Zenseact 开放数据集 ZOD 的多样性和远程信息。 |
| Chinese Abs From Machine Translation |
Papers from arxiv.org
更多精彩请移步主页
pic from pexels.com
相关文章:
【AI视野·今日Robot 机器人论文速览 第六十七期】Mon, 1 Jan 2024
AI视野今日CS.Robotics 机器人学论文速览 Mon, 1 Jan 2024 Totally 16 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers MURP: Multi-Agent Ultra-Wideband Relative Pose Estimation with Constrained Communications in 3D Environments Authors A…...

FBL刷写
刷写 1、刷写需求的理解2、刷写流程2.1、预编程阶段:保证在编程阶段的动作能够正常操作,控制器给响应。整车功能不会出现问题 刷写某一控制器时,避免其他控制器集DTC,85控制DTC; 28 通信控制.保证总线负载率不要过高(下…...

OpenCV-Python(24):模板匹配
原理及介绍 模板匹配是一种常用的图像处理技术,它用于在一幅图像中寻找与给定模板最匹配的区域(在一副大图中搜寻查找模版图像位置的方法)。模板匹配的基本思想是将模板图像在目标图像上滑动,并计算它们的相似度,找到相似度最高的位置即为匹配…...
机器学习--回归算法
🌳🌳🌳小谈:一直想整理机器学习的相关笔记,但是一直在推脱,今天发现知识快忘却了(虽然学的也不是那么深),但还是浅浅整理一下吧,便于以后重新学习。 …...

计算机网络——多址复用技术
1. 频分多址(FDMA) 1.1 基本原理 频率分配:在FDMA系统中,整个可用的频带被分割成多个较小的频带或通道。每个通道分配给一个用户。 时间利用:用户在分配给他们的频道上持续进行通信,不受时间限制。 1.2 优…...
stm32 HAL库 4096线ABZ编码器
[TOC]目录 ABZ编码器 4096线 买的是这个 AB相代表计数方向,Z代表过零点 cubemx配置 定时器Encoder 也可以选上DMA 中断 Z相GPIO中断 找一个空闲管脚 打开对应中断 代码 不用DMA int main(void) {short Enc_cnt 0;HAL_TIM_Encoder_Start_IT(&ht…...
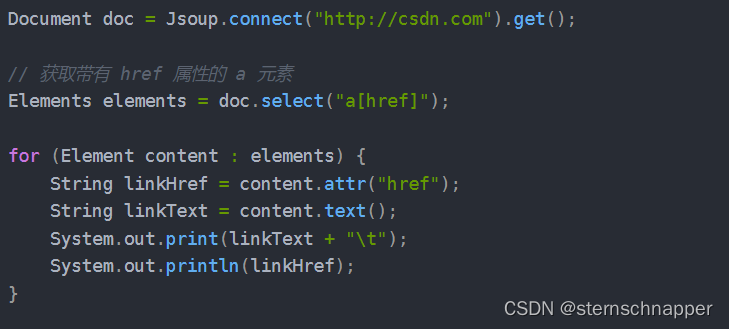
Java爬虫之Jsoup
1.Jsoup相关概念 Jsoup很多概念和js类似,可参照对比理解 Document :文档对象。每份HTML页面都是一个文档对象,Document 是 jsoup 体系中最顶层的结构。 Element:元素对象。一个 Document 中可以着包含着多个 Element 对象&#…...

如何在 C# 12 中使用主构造函数
C# 12 中最引人注目的新功能之一是对主构造函数的支持。主构造函数的概念并不新鲜。包括 Scala、Kotlin 和 OCaml 在内的多种编程语言都支持直接在声明类的位置集成构造函数参数。 在本文中,我们将仔细研究主构造函数以及如何在 C# 12 中使用它们。若要运行本文中提…...
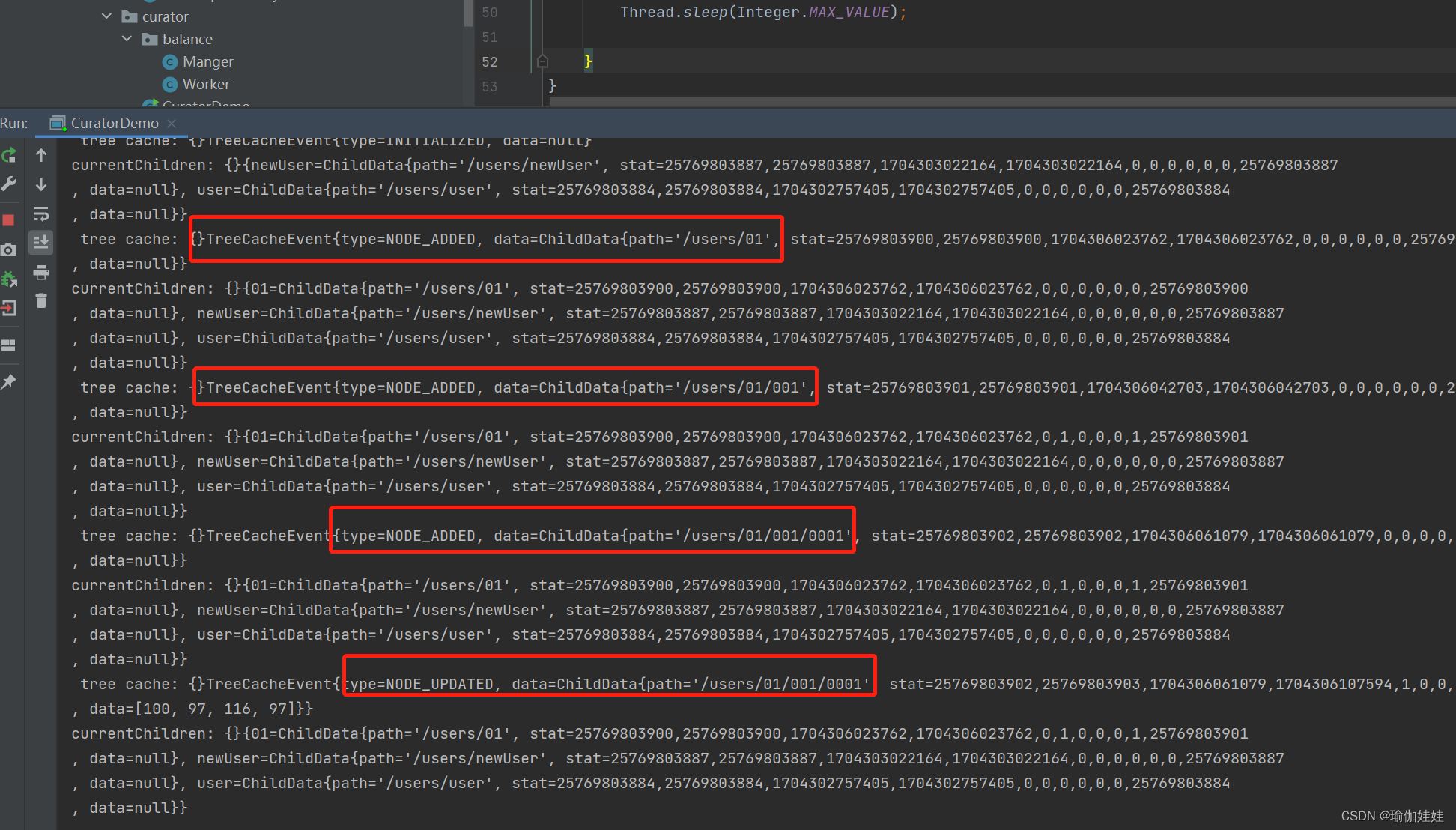
Zookeeper之Java客户端实战
ZooKeeper应用的开发主要通过Java客户端API去连接和操作ZooKeeper集群。可供选择的Java客户端API有: ZooKeeper官方的Java客户端API。第三方的Java客户端API,比如Curator。 接下来我们将逐一学习一下这两个java客户端是如何操作zookeeper的。 1. ZooKe…...

将文本文件导入Oracle数据库的简便方法:SQL Loader Express
需求 我有一个文本文件dbim.txt,是通过alert log生成的,内容如下: 2020-09-11 2020-09-11 ... 2023-12-03 2023-12-03 2023-12-26我已经在Oracle数据库中建立了目标表: create table dbim(a varchar(16));我想把日志文件导入Or…...

element-ui table-自定义表格某列的表头样式或者功能
自带表格 自定义表格某列的表头样式或者功能 <el-table><el-table-column :prop"date">//自定义表身每行数据<template slot-scope"scope">{{scope.row[scope.column.label] - ? - : scope.row[scope.column.label]}}</template>…...

Android 13.0 SystemUI状态栏居中显示时间和修改时间显示样式
1.概述 在13.0的系统rom定制化开发中,在systemui状态栏系统时间默认显示在左边和通知显示在一起,但是客户想修改显示位置,想显示在中间,所以就要修改SystemUI 的Clock.java 文件这个就是管理显示时间的,居中显示的话就得修改布局文件了 效果图如下: 2.SystemUI状态栏居中显…...

讲解eureca和nacus的区别
Eureca和Nacus都是远程过程调用(RPC)框架,用于实现分布式系统中不同节点之间的通信。它们之间的主要区别如下: 架构设计:Eureca是一个基于JavaScript的RPC框架,它使用了WebSockets作为传输层协议。Eureca C…...

python中parsel模块的css解析
一、爬虫页面分类 1.想要爬取的内容全部在标签中,可以使用xpath去进行解析如下图 2.想要爬取的内容呈现json的数据特征,用.json()转换为字典格式 3.页面不规则,标签中包含大括号,如下面想要获取键值内容怎么做,先用re正…...
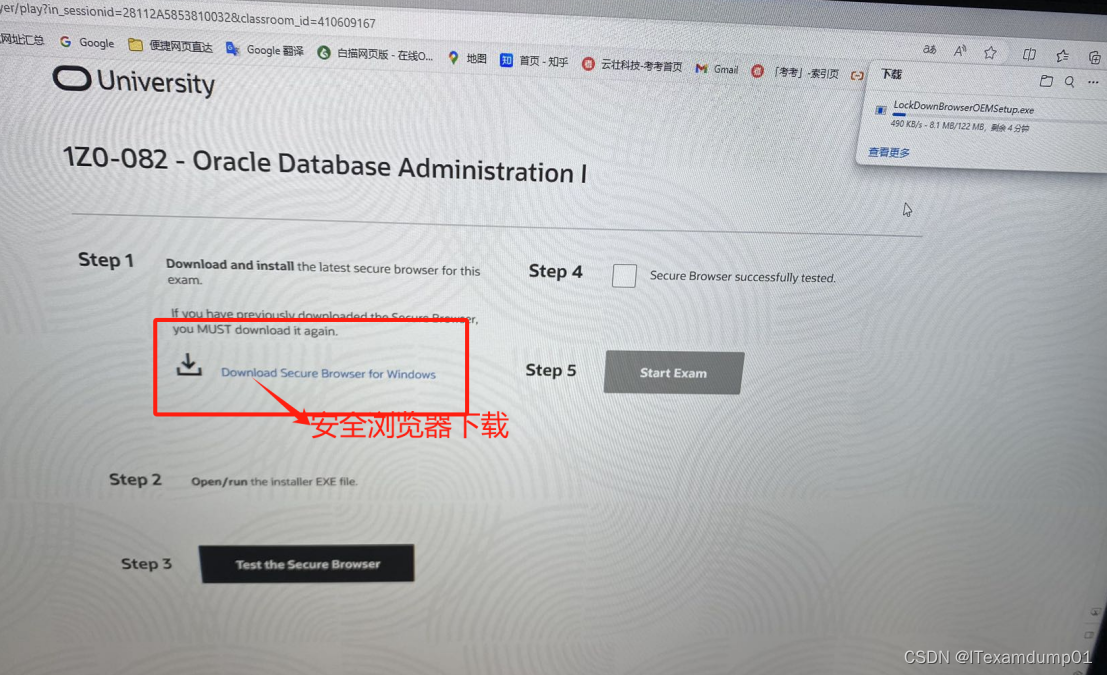
Oracle OCP怎么样线上考试呢
大家好!今天咱们就来聊聊Oracle OCP这个让人又爱又恨的认证。为啥说又爱又恨呢?因为它既是IT界的“金字招牌”,又是一块硬骨头,不是那么容易啃下来的。好了,废话不多说,我们直奔主题,来看看关于…...
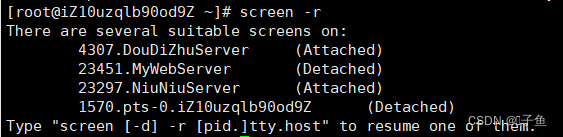
如何让自己的写的程序在阿里云一直运行
购买了阿里云服务器后,每次要用自己写在阿里云的服务器程序都要连接到云端 然后./运行该程序,而且每次一断开终端,该服务器就会自动停止,这样使用相当麻烦。那怎样才能让我们的服务器一直在云端后台运行,即便退出终端…...

【计算机图形学】NAP: Neural 3D Articulation Prior
文章目录 1. 这篇论文做了什么事,有什么贡献?2. Related Work铰接物体建模3D中的Diffusion model扩散模型 3. Pipeline铰接树参数化基于Diffusion的铰接树生成去噪网络 4. 实验评价铰接物体生成——以往做法与本文提出的新指标NAP捕捉到的铰接物体分布质…...
知识付费平台搭建?找明理信息科技,专业且高效
明理信息科技知识付费saas租户平台 在当今数字化时代,知识付费已经成为一种趋势,越来越多的人愿意为有价值的知识付费。然而,公共知识付费平台虽然内容丰富,但难以满足个人或企业个性化的需求和品牌打造。同时,开发和…...

CentOS7部署Kafka
CentOS7部署Kafka 一、部署1、前置条件2、下载与解压3、修改配置4、启动kafka二、使用详解1、创建一个主题2、展示所有主题3、启动消费端接收消息4、生产端发送消息三、代码集成pom.xmlapplication.propertiesKafkaConfiguration.javaKafkaConsumer.javaKafkaProducer.javaVehi…...
JS的防抖和节流
目录 防抖 搜索框带来的问题 实现的思路 案例 封装防抖函数 节流 滚动条加载带来的问题 实现的思路 案例 封装节流函数 防抖 搜索框带来的问题 需求:根据输入框内容来请求数据 <!DOCTYPE html> <html lang"en"> <head><…...
(二)TensorRT-LLM | 模型导出(v0.20.0rc3)
0. 概述 上一节 对安装和使用有个基本介绍。根据这个 issue 的描述,后续 TensorRT-LLM 团队可能更专注于更新和维护 pytorch backend。但 tensorrt backend 作为先前一直开发的工作,其中包含了大量可以学习的地方。本文主要看看它导出模型的部分&#x…...

java调用dll出现unsatisfiedLinkError以及JNA和JNI的区别
UnsatisfiedLinkError 在对接硬件设备中,我们会遇到使用 java 调用 dll文件 的情况,此时大概率出现UnsatisfiedLinkError链接错误,原因可能有如下几种 类名错误包名错误方法名参数错误使用 JNI 协议调用,结果 dll 未实现 JNI 协…...

【解密LSTM、GRU如何解决传统RNN梯度消失问题】
解密LSTM与GRU:如何让RNN变得更聪明? 在深度学习的世界里,循环神经网络(RNN)以其卓越的序列数据处理能力广泛应用于自然语言处理、时间序列预测等领域。然而,传统RNN存在的一个严重问题——梯度消失&#…...

测试markdown--肇兴
day1: 1、去程:7:04 --11:32高铁 高铁右转上售票大厅2楼,穿过候车厅下一楼,上大巴车 ¥10/人 **2、到达:**12点多到达寨子,买门票,美团/抖音:¥78人 3、中饭&a…...
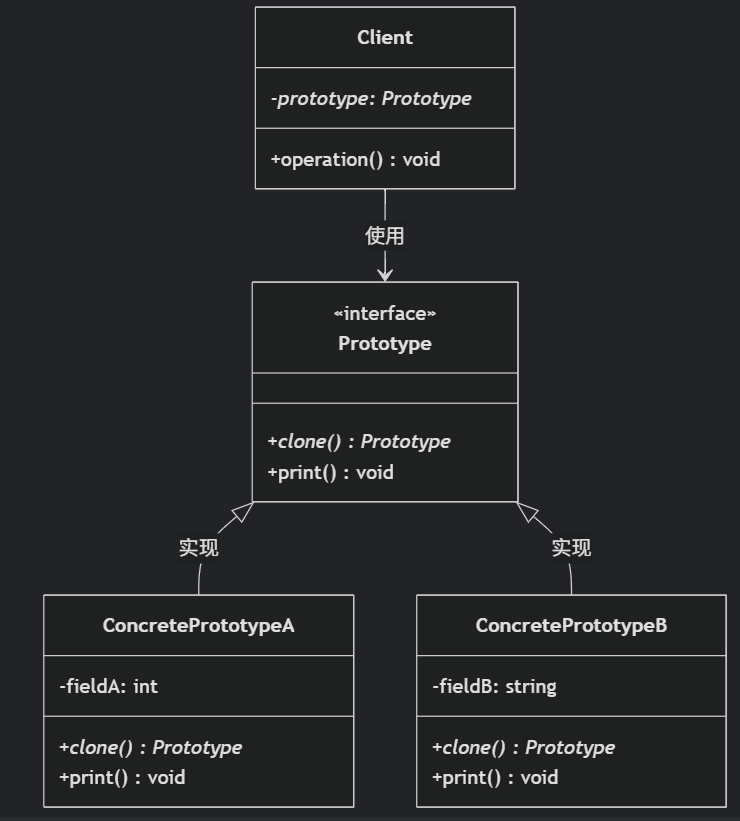
(二)原型模式
原型的功能是将一个已经存在的对象作为源目标,其余对象都是通过这个源目标创建。发挥复制的作用就是原型模式的核心思想。 一、源型模式的定义 原型模式是指第二次创建对象可以通过复制已经存在的原型对象来实现,忽略对象创建过程中的其它细节。 📌 核心特点: 避免重复初…...

【git】把本地更改提交远程新分支feature_g
创建并切换新分支 git checkout -b feature_g 添加并提交更改 git add . git commit -m “实现图片上传功能” 推送到远程 git push -u origin feature_g...

LLM基础1_语言模型如何处理文本
基于GitHub项目:https://github.com/datawhalechina/llms-from-scratch-cn 工具介绍 tiktoken:OpenAI开发的专业"分词器" torch:Facebook开发的强力计算引擎,相当于超级计算器 理解词嵌入:给词语画"…...

AspectJ 在 Android 中的完整使用指南
一、环境配置(Gradle 7.0 适配) 1. 项目级 build.gradle // 注意:沪江插件已停更,推荐官方兼容方案 buildscript {dependencies {classpath org.aspectj:aspectjtools:1.9.9.1 // AspectJ 工具} } 2. 模块级 build.gradle plu…...
与常用工具深度洞察App瓶颈)
iOS性能调优实战:借助克魔(KeyMob)与常用工具深度洞察App瓶颈
在日常iOS开发过程中,性能问题往往是最令人头疼的一类Bug。尤其是在App上线前的压测阶段或是处理用户反馈的高发期,开发者往往需要面对卡顿、崩溃、能耗异常、日志混乱等一系列问题。这些问题表面上看似偶发,但背后往往隐藏着系统资源调度不当…...

Python实现简单音频数据压缩与解压算法
Python实现简单音频数据压缩与解压算法 引言 在音频数据处理中,压缩算法是降低存储成本和传输效率的关键技术。Python作为一门灵活且功能强大的编程语言,提供了丰富的库和工具来实现音频数据的压缩与解压。本文将通过一个简单的音频数据压缩与解压算法…...