【【RTC实时时钟实验 -- 在HDMI上显示-FPGA 小实验】】
RTC实时时钟实验 – 在HDMI上显示
top.v
module RTS_TOP#(parameter TIME_INIT = 48'h24_01_06_11_08_00 ,parameter WAIT_TIME = 13'd8000 ,parameter SLAVE_ADDR = 7'b1010001 , // E2PROM 浠庢満鍦板潃parameter CLK_FREQ = 26'd50_000_000 , // 50MHz 鐨勬椂閽熼锟�?parameter I2C_FREQ = 18'd250_000 // SCL 鐨勬椂閽熼锟�?
)(input sys_clk ,input rst_n ,// to HDMI output tmds_clk_p , // TMDS 鏃堕挓閫氶亾output tmds_clk_n ,output [2:0] tmds_data_p , // TMDS 鏁版嵁閫氶亾output [2:0] tmds_data_n ,// I2C 閫氶亾output scl ,inout sda
);
//-----------------------------------------------------
//-----------------------------------------------------
// next is wire and reg define wire [15 : 0] i2c_addr ;
wire [7 : 0] i2c_data_w ;
wire i2c_rh_wl ;
wire i2c_exec ;
wire dri_clk ;
wire [7 : 0] i2c_data_r ;
wire i2c_ack ;
wire i2c_done ;wire [7 : 0 ] sec ;
wire [7 : 0 ] min ;
wire [7 : 0 ] hour ;
wire [7 : 0 ] day ;
wire [7 : 0 ] mon ;
wire [7 : 0 ] year ; //--------------------------------------------------------
//--------------------------------------------------------IIC_CONTROL#(.SLAVE_ADDR ( 7'b1010001 ),.CLK_FREQ ( 26'd50_000_000 ),.I2C_FREQ ( 18'd250_000 )
)u_IIC_CONTROL(.clk ( sys_clk ),.rst_n ( rst_n ),.i2c_addr ( i2c_addr ),.i2c_data_w ( i2c_data_w ),.i2c_rh_wl ( i2c_rh_wl ),.bit_control ( 0 ),.i2c_exec ( i2c_exec ),.dri_clk ( dri_clk ),.i2c_data_r ( i2c_data_r ),.i2c_ack ( i2c_ack ),.i2c_done ( i2c_done ),.scl ( scl ),.sda ( sda )
);PCF8563#(.TIME_INIT ( TIME_INIT ),.WAIT_TIME ( WAIT_TIME )
)u_PCF8563(.clk ( dri_clk ),.rst_n ( rst_n ),.i2c_done ( i2c_done ),.i2c_data_r ( i2c_data_r ),.i2c_rh_wl ( i2c_rh_wl ),.i2c_exec ( i2c_exec ),.i2c_addr ( i2c_addr ),.i2c_data_w ( i2c_data_w ),.sec ( sec ),.min ( min ),.hour ( hour ),.day ( day ),.mon ( mon ),.year ( year )
);hdmi_top u_hdmi_top(.sys_clk ( sys_clk ),.sys_rst_n ( rst_n ),.tmds_clk_p ( tmds_clk_p ),.tmds_clk_n ( tmds_clk_n ),.tmds_data_p ( tmds_data_p ),.tmds_data_n ( tmds_data_n ),.sec ( sec ),.min ( min ),.hour ( hour ),.day ( day ),.mon ( mon ),.year ( year )
);endmodule
dvi_transmitter_top.v
module dvi_transmitter_top(input pclk ,input sys_rst_n ,input pclk_x5 ,input video_hsync ,input video_vsync ,input video_de ,input [23 : 0] video_din ,output tmds_clk_p ,output tmds_clk_n ,output [2 : 0] tmds_data_p ,output [2 : 0] tmds_data_n ,output tmds_oen
);assign tmds_oen = 1 ; // next is define
wire reset ;
wire [9:0] blue_10bit ;
wire [9:0] green_10bit ;
wire [9:0] red_10bit ;wire [2:0] tmds_data_serial ;
wire tmds_clk_serial ;reset_syn u_reset_syn(.pclk ( pclk ),.reset_n ( sys_rst_n ),.reset ( reset )
);dvi_encoder u_dvi_encoder_blue(.clkin ( pclk ),.rstin ( reset ),.din ( video_din[7:0] ),.c0 ( video_hsync ),.c1 ( video_vsync ),.de ( video_de ),.dout ( blue_10bit )
);dvi_encoder u_dvi_encoder_green(.clkin ( pclk ),.rstin ( reset ),.din ( video_din[15:8] ),.c0 ( 1'b0 ),.c1 ( 1'b0 ),.de ( video_de ),.dout ( green_10bit )
);dvi_encoder u_dvi_encoder_red(.clkin ( pclk ),.rstin ( reset ),.din ( video_din[23:16] ),.c0 ( 1'b0 ),.c1 ( 1'b0 ),.de ( video_de ),.dout ( red_10bit )
);serializer10 u_serializer10_blue(.reset ( reset ),.paralell_clk ( pclk ),.serial_clk_5x ( pclk_x5 ),.paralell_data ( blue_10bit ),.serial_data_out ( tmds_data_serial[0] )
);serializer10 u_serializer10_green(.reset ( reset ),.paralell_clk ( pclk ),.serial_clk_5x ( pclk_x5 ),.paralell_data ( green_10bit ),.serial_data_out ( tmds_data_serial[1] )
);serializer10 u_serializer10_red(.reset ( reset ),.paralell_clk ( pclk ),.serial_clk_5x ( pclk_x5 ),.paralell_data ( red_10bit ),.serial_data_out ( tmds_data_serial[2] )
);serializer10 u_serializer10_clk(.reset ( reset ),.paralell_clk ( pclk ),.serial_clk_5x ( pclk_x5 ),.paralell_data ( 10'b1111100000 ),.serial_data_out ( tmds_clk_serial )
);//转换差分信号
OBUFDS #(.IOSTANDARD ("TMDS_33") // I/O电平标准为TMDS
) TMDS0 (.I (tmds_data_serial[0]),.O (tmds_data_p[0]),.OB (tmds_data_n[0])
);OBUFDS #(.IOSTANDARD ("TMDS_33") // I/O电平标准为TMDS
) TMDS1 (.I (tmds_data_serial[1]),.O (tmds_data_p[1]),.OB (tmds_data_n[1])
);OBUFDS #(.IOSTANDARD ("TMDS_33") // I/O电平标准为TMDS
) TMDS2 (.I (tmds_data_serial[2]), .O (tmds_data_p[2]), .OB (tmds_data_n[2])
);OBUFDS #(.IOSTANDARD ("TMDS_33") // I/O电平标准为TMDS
) TMDS3 (.I (tmds_clk_serial), .O (tmds_clk_p),.OB (tmds_clk_n)
);
endmodule
encoder.v
module dvi_encoder (input clkin, // pixel clock inputinput rstin, // async. reset input (active high)input [7:0] din, // data inputs: expect registeredinput c0, // c0 inputinput c1, // c1 inputinput de, // de inputoutput reg [9:0] dout // data outputs
);// Counting number of 1s and 0s for each incoming pixel// component. Pipe line the result.// Register Data Input so it matches the pipe lined adder// outputreg [3:0] n1d; //number of 1s in dinreg [7:0] din_q;//计算像素数据中“1”的个数always @ (posedge clkin) beginn1d <=#1 din[0] + din[1] + din[2] + din[3] + din[4] + din[5] + din[6] + din[7];din_q <=#1 din;end///// Stage 1: 8 bit -> 9 bit// Refer to DVI 1.0 Specification, page 29, Figure 3-5///wire decision1;assign decision1 = (n1d > 4'h4) | ((n1d == 4'h4) & (din_q[0] == 1'b0));wire [8:0] q_m;assign q_m[0] = din_q[0];assign q_m[1] = (decision1) ? (q_m[0] ^~ din_q[1]) : (q_m[0] ^ din_q[1]);assign q_m[2] = (decision1) ? (q_m[1] ^~ din_q[2]) : (q_m[1] ^ din_q[2]);assign q_m[3] = (decision1) ? (q_m[2] ^~ din_q[3]) : (q_m[2] ^ din_q[3]);assign q_m[4] = (decision1) ? (q_m[3] ^~ din_q[4]) : (q_m[3] ^ din_q[4]);assign q_m[5] = (decision1) ? (q_m[4] ^~ din_q[5]) : (q_m[4] ^ din_q[5]);assign q_m[6] = (decision1) ? (q_m[5] ^~ din_q[6]) : (q_m[5] ^ din_q[6]);assign q_m[7] = (decision1) ? (q_m[6] ^~ din_q[7]) : (q_m[6] ^ din_q[7]);assign q_m[8] = (decision1) ? 1'b0 : 1'b1;/// Stage 2: 9 bit -> 10 bit// Refer to DVI 1.0 Specification, page 29, Figure 3-5/reg [3:0] n1q_m, n0q_m; // number of 1s and 0s for q_malways @ (posedge clkin) beginn1q_m <=#1 q_m[0] + q_m[1] + q_m[2] + q_m[3] + q_m[4] + q_m[5] + q_m[6] + q_m[7];n0q_m <=#1 4'h8 - (q_m[0] + q_m[1] + q_m[2] + q_m[3] + q_m[4] + q_m[5] + q_m[6] + q_m[7]);endparameter CTRLTOKEN0 = 10'b1101010100;parameter CTRLTOKEN1 = 10'b0010101011;parameter CTRLTOKEN2 = 10'b0101010100;parameter CTRLTOKEN3 = 10'b1010101011;reg [4:0] cnt; //disparity counter, MSB is the sign bitwire decision2, decision3;assign decision2 = (cnt == 5'h0) | (n1q_m == n0q_m);/// [(cnt > 0) and (N1q_m > N0q_m)] or [(cnt < 0) and (N0q_m > N1q_m)]/assign decision3 = (~cnt[4] & (n1q_m > n0q_m)) | (cnt[4] & (n0q_m > n1q_m));// pipe line alignmentreg de_q, de_reg;reg c0_q, c1_q;reg c0_reg, c1_reg;reg [8:0] q_m_reg;always @ (posedge clkin) beginde_q <=#1 de;de_reg <=#1 de_q;c0_q <=#1 c0;c0_reg <=#1 c0_q;c1_q <=#1 c1;c1_reg <=#1 c1_q;q_m_reg <=#1 q_m;end///// 10-bit out// disparity counter///always @ (posedge clkin or posedge rstin) beginif(rstin) begindout <= 10'h0;cnt <= 5'h0;end else beginif (de_reg) beginif(decision2) begindout[9] <=#1 ~q_m_reg[8]; dout[8] <=#1 q_m_reg[8]; dout[7:0] <=#1 (q_m_reg[8]) ? q_m_reg[7:0] : ~q_m_reg[7:0];cnt <=#1 (~q_m_reg[8]) ? (cnt + n0q_m - n1q_m) : (cnt + n1q_m - n0q_m);end else beginif(decision3) begindout[9] <=#1 1'b1;dout[8] <=#1 q_m_reg[8];dout[7:0] <=#1 ~q_m_reg[7:0];cnt <=#1 cnt + {q_m_reg[8], 1'b0} + (n0q_m - n1q_m);end else begindout[9] <=#1 1'b0;dout[8] <=#1 q_m_reg[8];dout[7:0] <=#1 q_m_reg[7:0];cnt <=#1 cnt - {~q_m_reg[8], 1'b0} + (n1q_m - n0q_m);endendend else begincase ({c1_reg, c0_reg})2'b00: dout <=#1 CTRLTOKEN0;2'b01: dout <=#1 CTRLTOKEN1;2'b10: dout <=#1 CTRLTOKEN2;default: dout <=#1 CTRLTOKEN3;endcasecnt <=#1 5'h0;endendendendmodule
hdmi_display.v
module video_display(input pixel_clk ,input sys_rst_n ,input [ 11 : 0 ] pixel_xpos_w ,input [ 11 : 0 ] pixel_ypos_w ,output reg [ 23 : 0 ] pixel_data_w ,// displayinput [ 7 : 0] sec ,input [ 7 : 0] min ,input [ 7 : 0] hour ,input [ 7 : 0] day ,input [ 7 : 0] mon ,input [ 7 : 0] year);// 我不想显示年月日?? 直接存起??wire [7 : 0] year1 ;wire [7 : 0] mon1 ;wire [7 : 0] day1 ;assign day1 = day ;assign year1 = year ;assign mon1 = mon ;// 暂存起来//parameter definelocalparam CHAR_X_START = 11'd50; //字符起始点横坐标localparam CHAR_Y_START = 11'd100; //字符起始点纵坐标localparam CHAR_WIDTH = 10'd88; //字符宽度 32*11 = 352localparam CHAR_HEIGHT = 10'd16; //字符高度//棰滆??localparam BACK_COLOR = 24'hE0FFFF; //背景色,浅蓝??localparam CHAR_COLOR = 24'hff0000; //字符颜色,红??reg [127:0] char[10:0]; //字符数组// 这里是字符的显示 我想做的??//----------------------// 09 : 20 00// 两个+空格+冒号+空格+两个+空格+空格+两个 11??//////----------------------always @(posedge pixel_clk)beginchar[0] = 128'h00000018244242424242424224180000;/*"0",0*/char[1] = 128'h000000083808080808080808083E0000;/*"1",1*/char[2] = 128'h0000003C4242420204081020427E0000;/*"2",2*/char[3] = 128'h0000003C4242020418040242423C0000;/*"3",3*/char[4] = 128'h000000040C0C142424447F04041F0000;/*"4",4*/char[5] = 128'h0000007E404040784402024244380000;/*"5",5*/char[6] = 128'h000000182440405C62424242221C0000;/*"6",6*/char[7] = 128'h0000007E420404080810101010100000;/*"7",7*/char[8] = 128'h0000003C4242422418244242423C0000;/*"8",8*/char[9] = 128'h0000003844424242463A020224180000;/*"9",9*/char[10] = 128'h00000000000018180000000018180000;/*":",10*/end// 准备显示always@( posedge pixel_clk or negedge sys_rst_n)beginif( sys_rst_n == 0)beginpixel_data_w <=BACK_COLOR ;endelse// //09 : 20 00// 两个+空格+冒号+空格+两个+空格+空格+两个 11??// 小时的十??if( (pixel_xpos_w >= CHAR_X_START + CHAR_WIDTH/11*0)&& (pixel_xpos_w < CHAR_X_START + CHAR_WIDTH/11*1)&& (pixel_ypos_w >= CHAR_Y_START)&& (pixel_ypos_w < CHAR_Y_START + CHAR_HEIGHT) )beginif( char[hour[7 : 4]][ (CHAR_HEIGHT + CHAR_Y_START - pixel_ypos_w) * 8-((pixel_xpos_w - (CHAR_X_START)) % 8) -1 ] )pixel_data_w <=CHAR_COLOR ;elsepixel_data_w <=BACK_COLOR ;end// 小时的个??else if( (pixel_xpos_w >= CHAR_X_START + CHAR_WIDTH/11*1)&& (pixel_xpos_w < CHAR_X_START + CHAR_WIDTH/11*2)&& (pixel_ypos_w >= CHAR_Y_START)&& (pixel_ypos_w < CHAR_Y_START + CHAR_HEIGHT) )beginif( char[hour[3 : 0]][ (CHAR_HEIGHT + CHAR_Y_START - pixel_ypos_w) * 8-((pixel_xpos_w - (CHAR_X_START)) % 8) -1 ] )pixel_data_w <=CHAR_COLOR ;elsepixel_data_w <=BACK_COLOR ;end// 空格else if( (pixel_xpos_w >= CHAR_X_START + CHAR_WIDTH/11*2)&& (pixel_xpos_w < CHAR_X_START + CHAR_WIDTH/11*3)&& (pixel_ypos_w >= CHAR_Y_START)&& (pixel_ypos_w < CHAR_Y_START + CHAR_HEIGHT) )beginpixel_data_w <=BACK_COLOR ;end// 冒号else if( (pixel_xpos_w >= CHAR_X_START + CHAR_WIDTH/11*3)&& (pixel_xpos_w < CHAR_X_START + CHAR_WIDTH/11*4)&& (pixel_ypos_w >= CHAR_Y_START)&& (pixel_ypos_w < CHAR_Y_START + CHAR_HEIGHT) )beginif( char[10][ (CHAR_HEIGHT + CHAR_Y_START - pixel_ypos_w) * 8-((pixel_xpos_w - (CHAR_X_START)) % 8) -1 ] )pixel_data_w <=CHAR_COLOR ;elsepixel_data_w <=BACK_COLOR ;end// 空格else if( (pixel_xpos_w >= CHAR_X_START + CHAR_WIDTH/11*4)&& (pixel_xpos_w < CHAR_X_START + CHAR_WIDTH/11*5)&& (pixel_ypos_w >= CHAR_Y_START)&& (pixel_ypos_w < CHAR_Y_START + CHAR_HEIGHT) )beginpixel_data_w <=BACK_COLOR ;end// 分钟的十??else if( (pixel_xpos_w >= CHAR_X_START + CHAR_WIDTH/11*5)&& (pixel_xpos_w < CHAR_X_START + CHAR_WIDTH/11*6)&& (pixel_ypos_w >= CHAR_Y_START)&& (pixel_ypos_w < CHAR_Y_START + CHAR_HEIGHT) )beginif( char[min[7 : 4]][ (CHAR_HEIGHT + CHAR_Y_START - pixel_ypos_w) * 8-((pixel_xpos_w - (CHAR_X_START)) % 8) -1 ] )pixel_data_w <=CHAR_COLOR ;elsepixel_data_w <=BACK_COLOR ;end// 分钟的个??else if( (pixel_xpos_w >= CHAR_X_START + CHAR_WIDTH/11*6)&& (pixel_xpos_w < CHAR_X_START + CHAR_WIDTH/11*7)&& (pixel_ypos_w >= CHAR_Y_START)&& (pixel_ypos_w < CHAR_Y_START + CHAR_HEIGHT) )beginif( char[min[3 : 0]][ (CHAR_HEIGHT + CHAR_Y_START - pixel_ypos_w) * 8-((pixel_xpos_w - (CHAR_X_START)) % 8) -1 ] )pixel_data_w <=CHAR_COLOR ;elsepixel_data_w <=BACK_COLOR ;end//空格// 空格else if( (pixel_xpos_w >= CHAR_X_START + CHAR_WIDTH/11*7)&& (pixel_xpos_w < CHAR_X_START + CHAR_WIDTH/11*8)&& (pixel_ypos_w >= CHAR_Y_START)&& (pixel_ypos_w < CHAR_Y_START + CHAR_HEIGHT) )beginpixel_data_w <=BACK_COLOR ;end// 空格else if( (pixel_xpos_w >= CHAR_X_START + CHAR_WIDTH/11*8)&& (pixel_xpos_w < CHAR_X_START + CHAR_WIDTH/11*9)&& (pixel_ypos_w >= CHAR_Y_START)&& (pixel_ypos_w < CHAR_Y_START + CHAR_HEIGHT) )beginpixel_data_w <=BACK_COLOR ;end// 秒的十位else if( (pixel_xpos_w >= CHAR_X_START + CHAR_WIDTH/11*9)&& (pixel_xpos_w < CHAR_X_START + CHAR_WIDTH/11*10)&& (pixel_ypos_w >= CHAR_Y_START)&& (pixel_ypos_w < CHAR_Y_START + CHAR_HEIGHT) )beginif( char[sec[7 : 4]][ (CHAR_HEIGHT + CHAR_Y_START - pixel_ypos_w) * 8-((pixel_xpos_w - (CHAR_X_START)) % 8) -1 ] )pixel_data_w <=CHAR_COLOR ;elsepixel_data_w <=BACK_COLOR ;end// 分钟的个??else if( (pixel_xpos_w >= CHAR_X_START + CHAR_WIDTH/11*10)&& (pixel_xpos_w < CHAR_X_START + CHAR_WIDTH/11*11)&& (pixel_ypos_w >= CHAR_Y_START)&& (pixel_ypos_w < CHAR_Y_START + CHAR_HEIGHT) )beginif( char[sec[3 : 0]][ (CHAR_HEIGHT + CHAR_Y_START - pixel_ypos_w) * 8-((pixel_xpos_w - (CHAR_X_START)) % 8) -1 ] )pixel_data_w <=CHAR_COLOR ;elsepixel_data_w <=BACK_COLOR ;endelsebeginpixel_data_w <= BACK_COLOR; //屏幕背景为白??endendendmodule
HDMI_top.v
module hdmi_top(input sys_clk,input sys_rst_n,output tmds_clk_p, // TMDS 时钟通道output tmds_clk_n,output [2:0] tmds_data_p, // TMDS 数据通道output [2:0] tmds_data_n ,// next is from PCF
input [ 7 : 0] sec ,
input [ 7 : 0] min ,
input [ 7 : 0] hour ,
input [ 7 : 0] day ,
input [ 7 : 0] mon ,
input [ 7 : 0] year);//wire definewire pixel_clk;wire pixel_clk_5x;wire clk_locked;wire [10:0] pixel_xpos_w;wire [10:0] pixel_ypos_w;wire [23:0] pixel_data_w;wire video_hs;wire video_vs;wire video_de;wire [23:0] video_rgb;// next is main codeclk_wiz_0 instance_name1(// Clock out ports.clk_out1(pixel_clk), // output clk_out1.clk_out2(pixel_clk_5x), // output clk_out2// Status and control signals.reset(~sys_rst_n), // input reset.locked(clk_locked), // output locked// Clock in ports.clk_in1(sys_clk));video_driver u_video_driver(.pixel_clk ( pixel_clk ),.rst_n ( sys_rst_n ),.pixel_data ( pixel_data_w ),.video_rgb ( video_rgb ),.video_hs ( video_hs ),.video_vs ( video_vs ),.video_de ( video_de ),.pixel_xpos ( pixel_xpos_w ),.pixel_ypos ( pixel_ypos_w )
);video_display u_video_display(.pixel_clk ( pixel_clk ),.sys_rst_n ( sys_rst_n ),.pixel_xpos_w ( pixel_xpos_w ),.pixel_ypos_w ( pixel_ypos_w ),.pixel_data_w ( pixel_data_w ),.sec ( sec ),.min ( min ),.hour ( hour ),.day ( day ),.mon ( mon ),.year ( year )
);dvi_transmitter_top u_dvi_transmitter_top(.pclk ( pixel_clk ),.sys_rst_n ( sys_rst_n & clk_locked ),.pclk_x5 ( pixel_clk_5x ),.video_hsync ( video_hs ),.video_vsync ( video_vs ),.video_de ( video_de ),.video_din ( video_rgb ),.tmds_clk_p ( tmds_clk_p ),.tmds_clk_n ( tmds_clk_n ),.tmds_data_p ( tmds_data_p ),.tmds_data_n ( tmds_data_n ),.tmds_oen ( )
);endmodule
I2c_dri.v
module IIC_CONTROL #(parameter SLAVE_ADDR = 7'b1010001 , // E2PROM 从机地址parameter CLK_FREQ = 26'd50_000_000 , // 50MHz 的时钟频率parameter I2C_FREQ = 18'd250_000 // SCL 的时钟频率)(input clk ,input rst_n ,// ---------------------------------------------- //input [15 : 0] i2c_addr , // 地址input [7 : 0] i2c_data_w , // 数据input i2c_rh_wl , // 判断 是 read or writeinput bit_control , // 1是 16位 0 是 8位input i2c_exec ,// ------------------------------------------------ //output reg dri_clk ,output reg [7 : 0] i2c_data_r ,output reg i2c_ack ,output reg i2c_done ,// -------------------------------------------------- //output reg scl ,inout sda);// --------------------------------------------------------//// next is define //// --------------------------------------------------------//reg [9 : 0] clk_cnt ;wire [8 : 0] dri_cnt ;reg [2 : 0] state ;reg [2 : 0] next_state ;reg st_done ; // 在 状态机里面用来提示数据完成可以跳转reg sda_dir ; // sda方向控制器reg sda_out ; // 选择FPGA输入模式之后赋予sda线上wire sda_in ; // sda输入信号reg [6 : 0] cnt ; // 我们为了第三部分状态机而准备的reg [15: 0] addr_save ; // 地址存储reg [7 : 0] data_w_save ; // 数据写的暂存reg wr_flag ; // 0 是 写 1 是 读// 这三个是 暂存的方便调度的reg [7 : 0] data_r_save ; // 读到的数据存储方便整合// --------------------------------------------------------- //// parameter define //parameter st_idle = 3'b000 ; // 空闲状态parameter st_sladdr = 3'b001 ; // 发送器件地址parameter st_addr16 = 3'b010 ; // 发送高八位地址parameter st_addr8 = 3'b011 ; // 发送低八位地址parameter st_data_wr = 3'b100 ; // 写数据parameter st_addr_rd = 3'b101 ; // 再次发送器件地址读parameter st_data_rd = 3'b110 ; // 读数据parameter st_stop = 3'b111 ; // 结束操作停止位// ---------------------------------------------------- //// next is main code //// -------------------------------------------------------//assign dri_cnt = (CLK_FREQ/I2C_FREQ ) >> 2 ;always@(posedge clk or negedge rst_n )beginif(rst_n == 0)begindri_clk <= 0 ;clk_cnt <= 0 ;endelse if( clk_cnt == dri_cnt[8:1] - 1)beginclk_cnt <= 0 ;dri_clk <= ~dri_clk ;endelsebegindri_clk <= dri_clk ;clk_cnt <= clk_cnt + 1 ;endend// 下面开始状态机的叙述// 同步时序描述状态转移always@(posedge dri_clk or negedge rst_n)beginif(rst_n == 0)beginstate <= st_idle ;end // 处于空闲状态elsebeginstate <= next_state ;endend// 组合逻辑判断状态转移条件always@(*)beginnext_state <= st_idle ;case(state)st_idle :beginif(i2c_exec == 1)beginnext_state <= st_sladdr ;endelsebeginnext_state <= st_idle ;endend// 当触发了i2c_exec 时候 可以由 空闲状态转移到st_sladdr :beginif(st_done == 1)beginif(bit_control == 1)next_state <= st_addr16 ;elsenext_state <= st_addr8 ;endelsebeginnext_state <= st_sladdr ;endend// 当 触发了 st_done 之后 通过 bit_control 选择是低八位 还是高八位的传输st_addr16 :beginif(st_done == 1)beginnext_state <= st_addr8 ;endelsebeginnext_state <= st_addr16 ;endend// 高位 用完 轮到 低位的 传输st_addr8 :beginif(st_done == 1)beginif(wr_flag == 0)next_state <= st_data_wr ;elsenext_state <= st_addr_rd ;endelsebeginnext_state <= st_addr8 ;endend// 先来判断 写数据的 st_data_wr 数据代号是 4st_data_wr :beginif(st_done == 1)beginnext_state <= st_stop ;endelsebeginnext_state <= st_data_wr ;endend//st_addr_rd :beginif(st_done == 1)beginnext_state <= st_data_rd ;endelsebeginnext_state <= st_addr_rd ;endend//st_data_rd :beginif(st_done == 1)beginnext_state <= st_stop ;endelsebeginnext_state <= st_data_rd ;endend//st_stop :beginif(st_done == 1)beginnext_state <= st_idle ;endelsebeginnext_state <= st_stop ;endenddefault:next_state <= st_idle ;endcaseend/ 下面来考虑另一个状态机的第三部分 --- 时序电路描述状态输出// 设置一个变量 来控制 SDA的朝向assign sda = sda_dir ? sda_out : 1'bz ; // sda_dir 为1 FPGA控制assign sda_in = sda ; // 把sda当成了输出always@(posedge dri_clk or negedge rst_n )beginif( rst_n == 0)begin//首先根据输入输出 来判断 SCL 与 SDA 必须都为高scl <= 1 ;sda_dir <= 1 ;sda_out <= 1 ;// 剩下的输出 i2c_data_r(输出) == data_r_savei2c_data_r <= 0 ;data_r_save <= 0 ;// 下面是端口的另外两个输出 i2c_ack 和 i2c_donei2c_ack <= 0 ;i2c_done <= 0 ;// 接下里是 内部信号的调节 这两个一个是内部后续的计数 还有一个本次case完成的结束信号cnt <= 0 ;st_done <= 0 ;// 下面是三个暂存信号一个是 读写标志位 还有 传入的地址暂存 传入的数据暂存wr_flag <= 0 ;addr_save <= 0 ;data_w_save <= 0 ;endelsebeginst_done <= 0 ; // 脉冲信号cnt <= cnt + 1 ;//这里写在了 case之前就代表了 不用刻意在内部去调配 st_done 或是cntcase(state)st_idle :beginscl <= 1 ;sda_dir <= 1 ;sda_out <= 1 ;//这两个写不写不所谓 因为根本没用到i2c_data_r <= 0 ;data_r_save <= 0 ;i2c_done <= 0 ;//cnt <= 0 ;st_done <= 0 ;// 开始if( i2c_exec == 1) beginwr_flag <= i2c_rh_wl ;addr_save <= i2c_addr ;data_w_save <= i2c_data_w ;i2c_ack <= 0 ;endend// 这里先传递的是st_sladdr :begincase(cnt)7'd1 :sda_out <= 0 ;7'd3 :scl <= 0 ;7'd4 :sda_out <= SLAVE_ADDR[6] ;7'd5 :scl <= 1'b1 ;7'd7 :scl <= 1'b0 ;7'd8 :sda_out <= SLAVE_ADDR[5] ;7'd9 :scl <= 1'b1 ;7'd11 :scl <= 1'b0 ;7'd12 :sda_out <= SLAVE_ADDR[4] ;7'd13 :scl <= 1'b1 ;7'd15 :scl <= 1'b0 ;7'd16 :sda_out <= SLAVE_ADDR[3] ;7'd17 :scl <= 1'b1 ;7'd19 :scl <= 1'b0 ;7'd20 :sda_out <= SLAVE_ADDR[2] ;7'd21 :scl <= 1'b1 ;7'd23 :scl <= 1'b0 ;7'd24 :sda_out <= SLAVE_ADDR[1] ;7'd25 :scl <= 1'b1 ;7'd27 :scl <= 1'b0 ;7'd28 :sda_out <= SLAVE_ADDR[0] ;7'd29 :scl <= 1'b1 ;7'd31 :scl <= 1'b0 ;7'd32 :sda_out <= 1'b0 ;// 此处完成了 数据的传递 接下来的任务是 反馈7'd33 :scl <= 1'b1 ;7'd35 :scl <= 1'b0 ;7'd36 :sda_dir <= 1'b0 ; // 下放控制权给从机端口7'd37 :scl <= 1'b1 ;// 下一时刻判断是否 有正确的反馈拉低 并确定 st_done = 17'd38 :beginst_done <= 1'b1 ;if( sda_in == 1)i2c_ack <= 1'b1 ;end7'd39 :beginscl <= 1'b0 ;cnt <= 7'b0 ;enddefault :;endcaseend//发送高8位字节st_addr16 :begincase(cnt)7'd0 :begin // 39之后移动一格就是0 0 此处即可以开始//把使能交还给FPGA端sda_dir <= 1'b1 ;sda_out <= addr_save[15] ;end// 第一个转换有点时序差距 后面都是 每隔4 sda变化一次7'd1 :scl <= 1'b1 ;7'd3 :scl <= 1'b0 ;7'd4 :sda_out <= addr_save[14] ;7'd5 :scl <= 1'b1 ;7'd7 :scl <= 1'b0 ;7'd8 :sda_out <= addr_save[13] ;7'd9 :scl <= 1'b1 ;7'd11 :scl <= 1'b0 ;7'd12 :sda_out <= addr_save[12] ;7'd13 :scl <= 1'b1 ;7'd15 :scl <= 1'b0 ;7'd16 :sda_out <= addr_save[11] ;7'd17 :scl <= 1'b1 ;7'd19 :scl <= 1'b0 ;7'd20 :sda_out <= addr_save[10] ;7'd21 :scl <= 1'b1 ;7'd23 :scl <= 1'b0 ;7'd24 :sda_out <= addr_save[9] ;7'd25 :scl <= 1'b1 ;7'd27 :scl <= 1'b0 ;7'd28 :sda_out <= addr_save[8] ;// 29 拉升 31下降 32放控制权 33拉升 34结束并作判断 35 拉低 cnt归零为下一状态准备7'd29 :scl <= 1'b1 ;7'd31 :scl <= 1'b0 ;7'd32 :sda_dir <= 1'b0 ;7'd33 :scl <= 1'b1 ;7'd34 :beginst_done <= 1'b1 ; //完成if(sda_in == 1)i2c_ack <= 1'b1 ; // scl拉高时 反馈 i2c_ack = 1 表示有错误end7'd35 :beginscl <= 1'b0 ;cnt <= 7'b0 ;enddefault :;endcaseend//发送低8位字节st_addr8 :begin// 和上面这个写法是一样的 对于cnt = 0 sda_dir 交回FPGA控制权 并立刻赋值case(cnt)7'd0:beginsda_dir <= 1'b1 ;sda_out <= addr_save[7]; //字地址end7'd1 :scl <= 1'b1;7'd3 :scl <= 1'b0;7'd4 :sda_out <= addr_save[6];7'd5 :scl <= 1'b1;7'd7 :scl <= 1'b0;7'd8 :sda_out <= addr_save[5];7'd9 :scl <= 1'b1;7'd11 :scl <= 1'b0;7'd12 :sda_out <= addr_save[4];7'd13 :scl <= 1'b1;7'd15 :scl <= 1'b0;7'd16 :sda_out <= addr_save[3];7'd17 :scl <= 1'b1;7'd19 :scl <= 1'b0;7'd20 :sda_out <= addr_save[2];7'd21 :scl <= 1'b1;7'd23 :scl <= 1'b0;7'd24 :sda_out <= addr_save[1];7'd25 :scl <= 1'b1;7'd27 :scl <= 1'b0;7'd28 :sda_out <= addr_save[0];7'd29 :scl <= 1'b1 ;7'd31 :scl <= 1'b0 ;7'd32 :sda_dir <= 1'b0 ;7'd33 :scl <= 1'b1 ;7'd34 :beginst_done <= 1'b1 ; //完成if(sda_in == 1)i2c_ack <= 1'b1 ; // scl拉高时 反馈 i2c_ack = 1 表示有错误end7'd35 :beginscl <= 1'b0 ;cnt <= 7'b0 ;enddefault :;endcaseend//st_data_wr :begin// 和上面这个写法是一样的 对于cnt = 0 sda_dir 交回FPGA控制权 并立刻赋值case(cnt)7'd0:beginsda_dir <= 1'b1 ;sda_out <= data_w_save[7]; //字地址end7'd1 :scl <= 1'b1;7'd3 :scl <= 1'b0;7'd4 :sda_out <= data_w_save[6];7'd5 :scl <= 1'b1;7'd7 :scl <= 1'b0;7'd8 :sda_out <= data_w_save[5];7'd9 :scl <= 1'b1;7'd11 :scl <= 1'b0;7'd12 :sda_out <= data_w_save[4];7'd13 :scl <= 1'b1;7'd15 :scl <= 1'b0;7'd16 :sda_out <= data_w_save[3];7'd17 :scl <= 1'b1;7'd19 :scl <= 1'b0;7'd20 :sda_out <= data_w_save[2];7'd21 :scl <= 1'b1;7'd23 :scl <= 1'b0;7'd24 :sda_out <= data_w_save[1];7'd25 :scl <= 1'b1;7'd27 :scl <= 1'b0;7'd28 :sda_out <= data_w_save[0];// 29 拉升 31下降 32放控制权 33拉升 34结束并作判断 35 拉低 cnt归零为下一状态准备7'd29 :scl <= 1'b1 ;7'd31 :scl <= 1'b0 ;7'd32 :sda_dir <= 1'b0 ;7'd33 :scl <= 1'b1 ;7'd34 :beginst_done <= 1'b1 ; //完成if(sda_in == 1)i2c_ack <= 1'b1 ; // scl拉高时 反馈 i2c_ack = 1 表示有错误end7'd35 :beginscl <= 1'b0 ;cnt <= 7'b0 ;enddefault :;endcaseend// 读控制信号 可以开始读了st_addr_rd :begin// 这里的过程应该和上面的那个 st_sladdr一样 先写地址// 一样又不太一样case(cnt)7'd0 :beginsda_dir <= 1'b1;sda_out <= 1'b1;end7'd1 :scl <= 1'b1;7'd2 :sda_out <= 1'b0; //重新开始7'd3 :scl <= 1'b0;7'd4 :sda_out <= SLAVE_ADDR[6]; //传送器件地址7'd5 :scl <= 1'b1;7'd7 :scl <= 1'b0;7'd8 :sda_out <= SLAVE_ADDR[5];7'd9 :scl <= 1'b1;7'd11:scl <= 1'b0;7'd12:sda_out <= SLAVE_ADDR[4];7'd13:scl <= 1'b1;7'd15:scl <= 1'b0;7'd16:sda_out <= SLAVE_ADDR[3];7'd17:scl <= 1'b1;7'd19:scl <= 1'b0;7'd20:sda_out <= SLAVE_ADDR[2];7'd21:scl <= 1'b1;7'd23:scl <= 1'b0;7'd24:sda_out <= SLAVE_ADDR[1];7'd25:scl <= 1'b1;7'd27:scl <= 1'b0;7'd28:sda_out <= SLAVE_ADDR[0];7'd29:scl <= 1'b1;7'd31:scl <= 1'b0;7'd32:sda_out <= 1'b1; //1:读7'd33:scl <= 1'b1;7'd35:scl <= 1'b0;7'd36:beginsda_dir <= 1'b0;sda_out <= 1'b1;end7'd37:scl <= 1'b1;7'd38:begin //从机应答st_done <= 1'b1;if(sda_in == 1'b1) //高电平表示未应答i2c_ack <= 1'b1; //拉高应答标志位end7'd39:beginscl <= 1'b0;cnt <= 7'b0;enddefault :;endcaseendst_data_rd :begin //读取数据(8 bit)case(cnt)7'd0:sda_dir <= 1'b0;7'd1:begindata_r_save[7] <= sda_in;scl <= 1'b1;end7'd3:scl <= 1'b0;7'd5:begindata_r_save[6] <= sda_in ;scl <= 1'b1 ;end7'd7:scl <= 1'b0;7'd9:begindata_r_save[5] <= sda_in;scl <= 1'b1 ;end7'd11:scl <= 1'b0;7'd13:begindata_r_save[4] <= sda_in;scl <= 1'b1 ;end7'd15:scl <= 1'b0;7'd17:begindata_r_save[3] <= sda_in;scl <= 1'b1 ;end7'd19:scl <= 1'b0;7'd21:begindata_r_save[2] <= sda_in;scl <= 1'b1 ;end7'd23:scl <= 1'b0;7'd25:begindata_r_save[1] <= sda_in;scl <= 1'b1 ;end7'd27:scl <= 1'b0;7'd29:begindata_r_save[0] <= sda_in;scl <= 1'b1 ;end7'd31:scl <= 1'b0;7'd32:beginsda_dir <= 1'b1;sda_out <= 1'b1;end7'd33:scl <= 1'b1;7'd34:st_done <= 1'b1; //非应答7'd35:beginscl <= 1'b0;cnt <= 7'b0;i2c_data_r <= data_r_save;enddefault :;endcaseendst_stop:begin //结束I2C操作case(cnt)7'd0:beginsda_dir <= 1'b1; //结束I2Csda_out <= 1'b0;end7'd1 :scl <= 1'b1;7'd3 :sda_out <= 1'b1;7'd15:st_done <= 1'b1;7'd16:begincnt <= 7'b0;i2c_done <= 1'b1; //向上层模块传递I2C结束信号enddefault :;endcaseendendcaseendendendmodule
PCF8563.v
module PCF8563#(parameter TIME_INIT = 48'h24_01_06_14_30_00 ,parameter WAIT_TIME = 13'd8000)(input clk ,input rst_n ,input i2c_done ,input [7 : 0] i2c_data_r , // this thing from i2c to HDMI//output reg i2c_rh_wl ,output reg i2c_exec ,output reg [15 : 0] i2c_addr ,output reg [ 7 : 0] i2c_data_w , // this is give to i2c//output reg [ 7 : 0] sec ,output reg [ 7 : 0] min ,output reg [ 7 : 0] hour ,output reg [ 7 : 0] day ,output reg [ 7 : 0] mon ,output reg [ 7 : 0] year);// parameter and definereg [3 : 0] reg_cnt ;reg [12 : 0] wait_cnt ;//always@(posedge clk or negedge rst_n)beginif(rst_n == 0 )begini2c_rh_wl <= 0 ;i2c_exec <= 0 ;i2c_addr <= 0 ;i2c_data_w <= 0 ;sec <= 0 ;min <= 0 ;hour <= 0 ;day <= 0 ;mon <= 0 ;year <= 0 ;reg_cnt <= 0 ;wait_cnt <= 0 ;endelsebegini2c_exec <= 0 ;case(reg_cnt)4'd0 :begin // ��???i2c_exec <= 0 ;if(wait_cnt == WAIT_TIME )beginwait_cnt <= 0 ;reg_cnt <= reg_cnt +1 ;endelsewait_cnt <= wait_cnt + 1 ;end//---------------------------------------------------------------------4'd1 :begin // ?? ??i2c_exec <= 1 ;i2c_addr <= 8'h02 ;reg_cnt <= reg_cnt + 1 ;i2c_data_w <= TIME_INIT[7 : 0] ;end4'd2 :begin // ?? ??if(i2c_done == 1)beginsec <= i2c_data_r[6 : 0] ;reg_cnt <= reg_cnt + 1 ;endend//--------------------------------------------------------------------------4'd3 : // ?? ����begini2c_exec <= 1 ;i2c_addr <= 8'h03 ;reg_cnt <= reg_cnt + 1 ;i2c_data_w <= TIME_INIT[15: 8] ;end4'd4 : // ?? ����begin //if(i2c_done == 1)beginmin <= i2c_data_r[6 : 0] ;reg_cnt <= reg_cnt + 1 ;endend//---------------------------------------------------------------4'd5 : // ?? Сʱbegini2c_exec <= 1 ;i2c_addr <= 8'h04 ;reg_cnt <= reg_cnt + 1 ;i2c_data_w <= TIME_INIT[23: 16] ;end4'd6 : // ?? Сʱbegin //if(i2c_done == 1)beginhour <= i2c_data_r[5 : 0] ;reg_cnt <= reg_cnt + 1 ;endend//---------------------------------------------------------------4'd7 : // ?? ??begini2c_exec <= 1 ;i2c_addr <= 8'h05 ;reg_cnt <= reg_cnt + 1 ;i2c_data_w <= TIME_INIT[31: 24] ;end4'd8 : // ?? ??begin //if(i2c_done == 1)beginday <= i2c_data_r[5 : 0] ;reg_cnt <= reg_cnt + 1 ;endend//----------------------------------------------------------------------4'd9 : // ?? ??begini2c_exec <= 1 ;i2c_addr <= 8'h07 ;reg_cnt <= reg_cnt + 1 ;i2c_data_w <= TIME_INIT[39: 32] ;end4'd10 : // ?? ??begin //if(i2c_done == 1)beginmon <= i2c_data_r[4 : 0] ;reg_cnt <= reg_cnt + 1 ;endend//------------------------------------------------------------------------4'd11 : // ?? ??begini2c_exec <= 1 ;i2c_addr <= 8'h08 ;reg_cnt <= reg_cnt + 1 ;i2c_data_w <= TIME_INIT[47: 40] ;end4'd12 : // ?? ??begin //if(i2c_done == 1)beginyear <= i2c_data_r[7 : 0] ;i2c_rh_wl <= 1 ;reg_cnt <= 1 ;endenddefault : reg_cnt <= 0 ;endcaseend
end
endmodule
reset_syn.v
module reset_syn(input pclk ,input reset_n ,output reg reset);reg reset1 ;always@( posedge pclk or negedge reset_n)beginif( reset_n == 0)beginreset1 <= 1 ;endelsebeginreset1 <= 0 ;reset <= reset1 ;endend
endmodule
serializer.v
module serializer10 (input reset , // 复位,高有效input paralell_clk , // 输入并行数据时钟 input serial_clk_5x , // 输入串行数据时钟input [9 : 0] paralell_data , // 输入并行数据output serial_data_out // 输出串行数据
);//wire definewire cascade1 ; //用于两个 OSERDESE2 级联的信号wire cascade2 ;// 此处的代码 来自 vivado的 原语 和 正点原子的同时调配
// 这是 master接口 OSERDESE2 #(.DATA_RATE_OQ("DDR"), // 设置双倍数据速率.DATA_RATE_TQ("DDR"), // DDR, BUF, SDR.DATA_WIDTH(10), // 输入的并行数据宽度为 10bit// .INIT_OQ(1'b0), // Initial value of OQ output (1'b0,1'b1)// .INIT_TQ(1'b0), // Initial value of TQ output (1'b0,1'b1).SERDES_MODE("MASTER"), // MASTER, SLAVE//.SRVAL_OQ(1'b0), // OQ output value when SR is used (1'b0,1'b1)// .SRVAL_TQ(1'b0), // TQ output value when SR is used (1'b0,1'b1).TBYTE_CTL("FALSE"), // Enable tristate byte operation (FALSE, TRUE).TBYTE_SRC("FALSE"), // Tristate byte source (FALSE, TRUE).TRISTATE_WIDTH(1) // 3-state converter width (1,4))OSERDESE2_MASTER (.OFB(), // 未使用.OQ(serial_data_out), // 串行输出数据// SHIFTOUT1 / SHIFTOUT2: 1-bit (each) output: Data output expansion (1-bit each).SHIFTOUT1(), // SHIFTIN1 用于位宽扩展.SHIFTOUT2(), // SHIFTIN2 用于位宽扩展.TBYTEOUT(), // 未使用.TFB(), // 未使用.TQ(), // 未使用.CLK(serial_clk_5x), // 串行数据时钟,5 倍时钟频率.CLKDIV(paralell_clk), // 并行数据时钟// D1 - D8: 1-bit (each) input: Parallel data inputs (1-bit each).D1(paralell_data[0]),.D2(paralell_data[1]),.D3(paralell_data[2]),.D4(paralell_data[3]),.D5(paralell_data[4]),.D6(paralell_data[5]),.D7(paralell_data[6]),.D8(paralell_data[7]),.OCE(1'b1), // 1-bit input: Output data clock enable.RST(reset), // 1-bit input: Reset// SHIFTIN1 / SHIFTIN2: 1-bit (each) input: Data input expansion (1-bit each).SHIFTIN1(cascade1), // SHIFTIN1 用于位宽扩展.SHIFTIN2(cascade2), // SHIFTIN2 用于位宽扩展// T1 - T4: 1-bit (each) input: Parallel 3-state inputs.T1(1'b0), // 未使用.T2(1'b0), // 未使用.T3(1'b0), // 未使用.T4(1'b0), // 未使用.TBYTEIN(1'b0), // 未使用.TCE(1'b0) // 未使用);// slave接口 OSERDESE2 #(.DATA_RATE_OQ("DDR"), // 设置双倍数据速率.DATA_RATE_TQ("DDR"), // DDR, BUF, SDR.DATA_WIDTH(10), // 输入的并行数据宽度为 10bit// .INIT_OQ(1'b0), // Initial value of OQ output (1'b0,1'b1)// .INIT_TQ(1'b0), // Initial value of TQ output (1'b0,1'b1).SERDES_MODE("SLAVE"), // MASTER, SLAVE//.SRVAL_OQ(1'b0), // OQ output value when SR is used (1'b0,1'b1)// .SRVAL_TQ(1'b0), // TQ output value when SR is used (1'b0,1'b1).TBYTE_CTL("FALSE"), // Enable tristate byte operation (FALSE, TRUE).TBYTE_SRC("FALSE"), // Tristate byte source (FALSE, TRUE).TRISTATE_WIDTH(1) // 3-state converter width (1,4))OSERDESE2_SLAVE (.OFB(), // 未使用.OQ(), // 串行输出数据// SHIFTOUT1 / SHIFTOUT2: 1-bit (each) output: Data output expansion (1-bit each).SHIFTOUT1(cascade1), // SHIFTIN1 用于位宽扩展.SHIFTOUT2(cascade2), // SHIFTIN2 用于位宽扩展.TBYTEOUT(), // 未使用.TFB(), // 未使用.TQ(), // 未使用.CLK(serial_clk_5x), // 串行数据时钟,5 倍时钟频率.CLKDIV(paralell_clk), // 并行数据时钟// D1 - D8: 1-bit (each) input: Parallel data inputs (1-bit each).D1(1'b0),.D2(1'b0),.D3(paralell_data[8]),.D4(paralell_data[9]),.D5(1'b0),.D6(1'b0),.D7(1'b0),.D8(1'b0),.OCE(1'b1), // 1-bit input: Output data clock enable.RST(reset), // 1-bit input: Reset// SHIFTIN1 / SHIFTIN2: 1-bit (each) input: Data input expansion (1-bit each).SHIFTIN1(), // SHIFTIN1 用于位宽扩展.SHIFTIN2(), // SHIFTIN2 用于位宽扩展// T1 - T4: 1-bit (each) input: Parallel 3-state inputs.T1(1'b0), // 未使用.T2(1'b0), // 未使用.T3(1'b0), // 未使用.T4(1'b0), // 未使用.TBYTEIN(1'b0), // 未使用.TCE(1'b0) // 未使用);endmodule
video_driver.v
module video_driver
(input pixel_clk ,input rst_n ,input [ 23 : 0 ] pixel_data ,output [ 23 : 0 ] video_rgb ,output video_hs , // 行同步信号output video_vs , // 场同步信号output video_de , // 数据使能output [ 11 : 0 ] pixel_xpos , // 像素点横坐标 1280output [ 11 : 0 ] pixel_ypos // 像素点横坐标 720
);//parameter define//1280*720 分辨率时序参数 时钟频率74.25parameter H_SYNC = 12'd40; //行同步parameter H_BACK = 12'd220; //行显示后沿parameter H_DISP = 12'd1280; //行有效数据parameter H_FRONT = 12'd110; //行显示前沿parameter H_TOTAL = 12'd1650; //行扫描周期parameter V_SYNC = 12'd5; //场同步parameter V_BACK = 12'd20; //场显示后沿parameter V_DISP = 12'd720; //场有效数据parameter V_FRONT = 12'd5; //场显示前沿parameter V_TOTAL = 12'd750; //场扫描周期// reg definereg [11 : 0] cnt_h ;reg [11 : 0] cnt_v ;wire data_reg ; // define// next is main codealways@(posedge pixel_clk or negedge rst_n)beginif( rst_n == 0)begincnt_h <= 0 ;endelsebeginif(cnt_h == H_TOTAL - 1)begincnt_h <= 0 ;endelsecnt_h <= cnt_h + 1 ;endendalways@(posedge pixel_clk or negedge rst_n)beginif( rst_n == 0)begincnt_v = 0 ;endelsebeginif( cnt_h == H_TOTAL - 1)beginif(cnt_v == V_TOTAL - 1)begincnt_v <= 0 ;endelsebegincnt_v <= cnt_v + 1 ;endendendend// =======================main code============\\// video_rgb // video_hs // video_vs // video_de // pixel_xpos// pixel_ypos
assign video_hs = 1 ;
assign video_vs = 1 ; assign video_rgb = video_de ? pixel_data : 24'b0 ; assign video_de = (((cnt_h >= H_SYNC+H_BACK) && (cnt_h < H_SYNC+H_BACK+H_DISP))
&&((cnt_v >= V_SYNC+V_BACK) && (cnt_v < V_SYNC+V_BACK+V_DISP)))
? 1'b1 : 1'b0;assign data_reg = (((cnt_h >= H_SYNC+H_BACK - 1) && (cnt_h < H_SYNC+H_BACK+H_DISP - 1))
&&((cnt_v >= V_SYNC+V_BACK) && (cnt_v < V_SYNC+V_BACK+V_DISP)))
? 1'b1 : 1'b0;assign pixel_xpos = data_reg ? (cnt_h - (H_SYNC + H_BACK - 1'b1)) : 0;
assign pixel_ypos = data_reg ? (cnt_v - (V_SYNC + V_BACK - 1'b1)) : 0;endmodule
README.md
## RTC实时时钟实验 -- 在HDMI上显示 ### 将整体设计分为3部分
( HDMI部分 中间模块 IIC 转接口
其实 HDMI的部分 只要在于修改 display 的显示
对于 IIC 转接口 直接使用上一个项目的 示例 )先了解难度最大的中间模块的书写
在第一次上电 将初始值赋予i2c_dri 这是写 部分 接下来都是进入循环的读
其实我觉得他这个思路挺好的 就是记录一个 i2c_done 如果没有接收到done 信号 就一直执行
接收到了这里有一个值得思考的地方为什么正点原子把 i2c_addr,明明是 16位 在赋值的时候只搞8位
难道不会出现问题嘛?可恶!!!在完成中间模块 和 IIC的模块之后
我们接下来考虑的是 HDMI的接口
HDMI 下属又分为几个小的模块 主要修改的
dvi_transmitter_top
encoder
reset_syn
serializer
top // 修改
video_display // 修改
video_driver
相关文章:

【【RTC实时时钟实验 -- 在HDMI上显示-FPGA 小实验】】
RTC实时时钟实验 – 在HDMI上显示 top.v module RTS_TOP#(parameter TIME_INIT 48h24_01_06_11_08_00 ,parameter WAIT_TIME 13d8000 ,parameter SLAVE_ADDR 7b1010001 , // E2PROM 浠庢満鍦板潃parameter CLK_FR…...
Flutter 图片和资源的高效使用指南
文章目录 指定资源什么是 [pubspec.yaml](https://dart.cn/tools/pub/pubspec) 文件 图片图片常用的配置属性加载本地图片通过 pubspec.yml 文件进行配置图片目录使用 Image.asset 小部件加载本地图片 加载网络图片通过 Image.network小部件加载网络图片:使用Image.…...

RedisTemplate 怎么获取到链接信息?怎么获取到所有key?怎么获取指定key?
获取Redis的链接信息: (RedisTemplate<String, ?> redisTemplate) {RedisConnectionFactory connectionFactory redisTemplate.getConnectionFactory();(!(connectionFactory LettuceConnectionFactory)) {System..println();;}LettuceConnectionFactory l…...

【Unity】动态申请权限
1、AndroidManifest.xml在<application></application>内添加一行: <meta-data android:name"unityplayer.SkipPermissionsDialog" android:value"true" /> 作用:屏蔽应用启动时弹出申请权限弹窗(危…...
tp8/6 插件PhpOffice\PhpSpreadsheet导入表格
一、安装 composer require phpoffice/phpspreadsheet 官网:phpoffice/phpspreadsheet - Packagist 二、代码 <?php namespace app\services\upload\model; use app\services\BaseServices; use \PhpOffice\PhpSpreadsheet\Spreadsheet; use \PhpOffice\Php…...
Android studio VideoView 应用设计
一、运行效果: 二、新建empty activity项目: 三、打开activity_main.xml布局文件,添加VideoView: <VideoViewandroid:id="@+id/videoView"android:layout_width="368dp"android:layout_height="573dp"app:layout_constraintBottom_toBot…...
)
Python基础(十八、文件操作读取)
文章目录 一、open方法二、read和readlines方法三、readline方法四、关闭操作五、with open语句总结 一、open方法 Python 中可以使用 open 方法来打开一个文件,该方法会返回一个文件对象。open 方法的语法如下: file_object open(file_name, mode)其…...
Mac 16g约等于Windows多少g?
Mac 16g 内存等于 Windows 320g 内存 何为“黄金内存”? Mac 的内存是用黄金做的,而 Windows 的内存是用铁做的。 黄金的密度是 19.32 g/cm,而铁的密度是 7.874 g/cm。 因此,16g 的黄金体积是 0.082 cm,而 16g 的铁…...
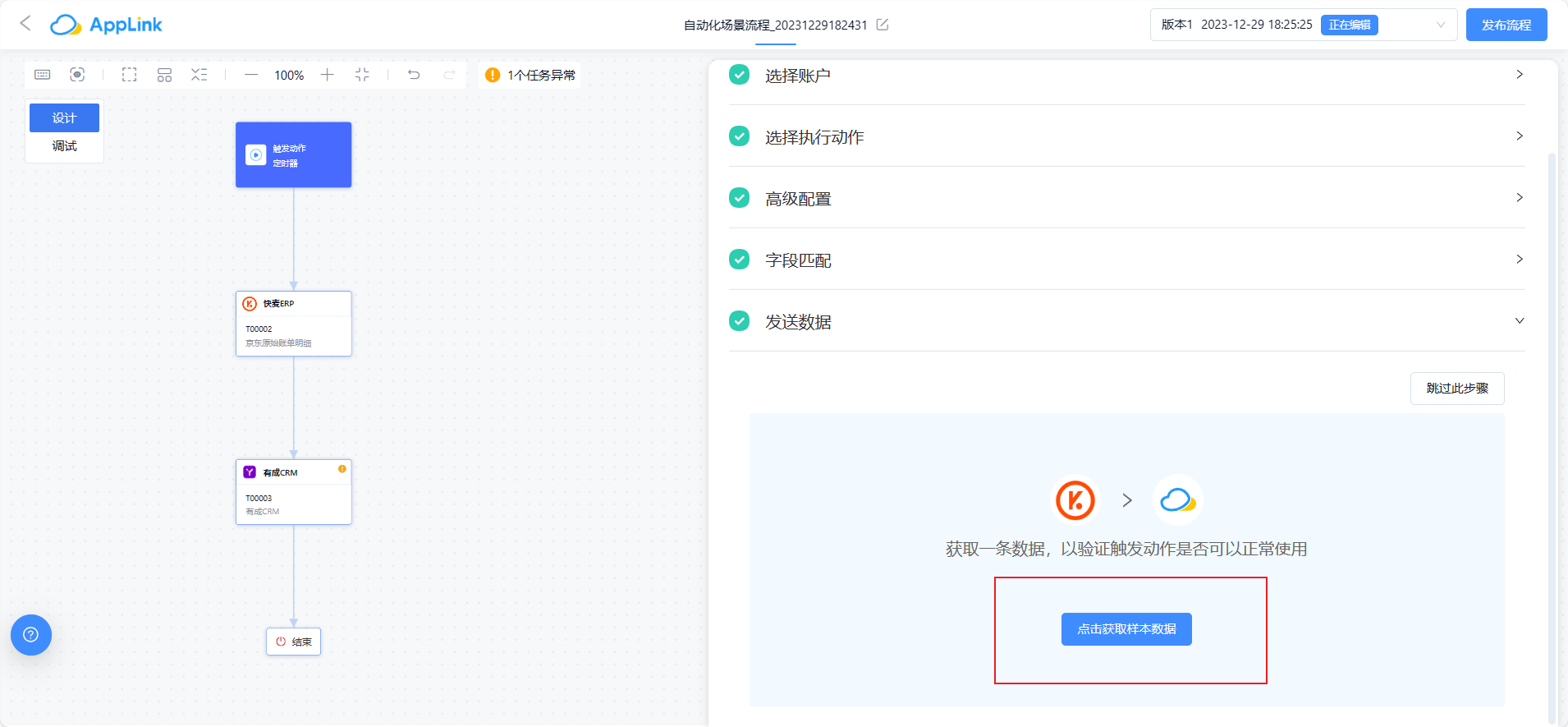
快麦ERP退货借助APPlink快速同步CRM
什么是APPlink? APPlink是RestCloud打造的一款简单易用的零代码自动化集成平台,为业务流程提供自动化的解决方案,将企业内部的核心系统以及第三方应用程序和云服务等进行集成。无论是开发人员还是业务人员,都可以使用APPlink轻松…...

springMVC获取请求参数的方式
文章目录 springmvc获取参数的方式1、ServletAPI获取参数(原生态)2、通过控制器的形参取值3、 RequestParam4、通过POJO获取请求参数 springmvc获取参数的方式 1、ServletAPI获取参数(原生态) 将HttpServletRequest作为控制器方…...

android常用方法
获取应用安装来源 private String getAppInstaller(Context context, String packageName) {return context.getPackageManager().getInstallerPackageName(packageName);}判断是否系统应用 在/system/app 或者 /system/priv-app目录下的应用。 public boolean isSystem(Conte…...
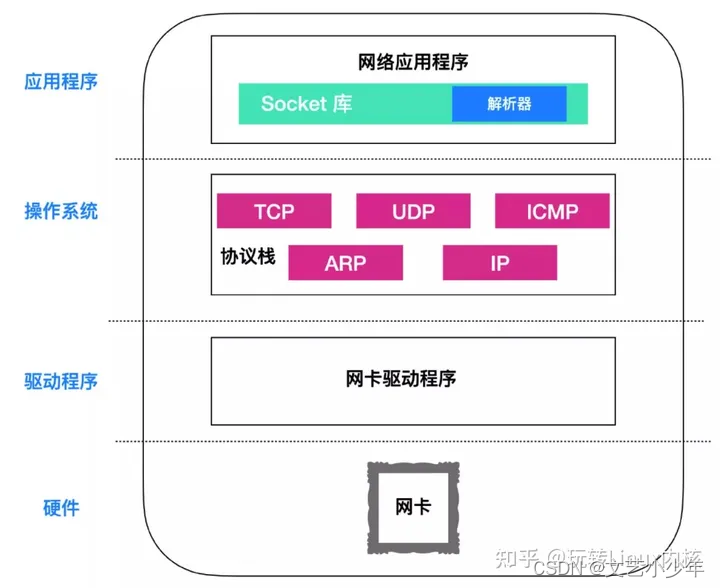
Linux内核--网络协议栈(一)Socket通信原理和实例讲解
目录 一、引言 二、Socket ------>2.1、socket编程 ------>2.2、Socket的创建 三、收发数据 四、断开连接 五、删除套接字 六、网络 IO 一、引言 本章开始进入linux内核中网络部分的学习,先简单介绍一下socket套接字 二、Socket 一个数据包经由应用程序产生…...
Spring事务(2):声明式事务管理案例-转账(xml、注解)
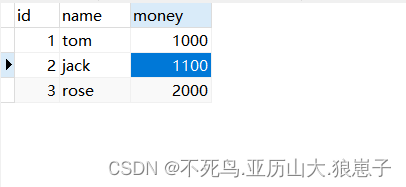
1 编写转账案例,引出事务管理问题 需求:账号转账,Tom账号取出1000元,存放到Jack账号上 1.1 建表脚本(MySQL) CREATE TABLE t_account (id INT(11) NOT NULL AUTO_INCREMENT,name VARCHAR(20) NOT NULL,m…...
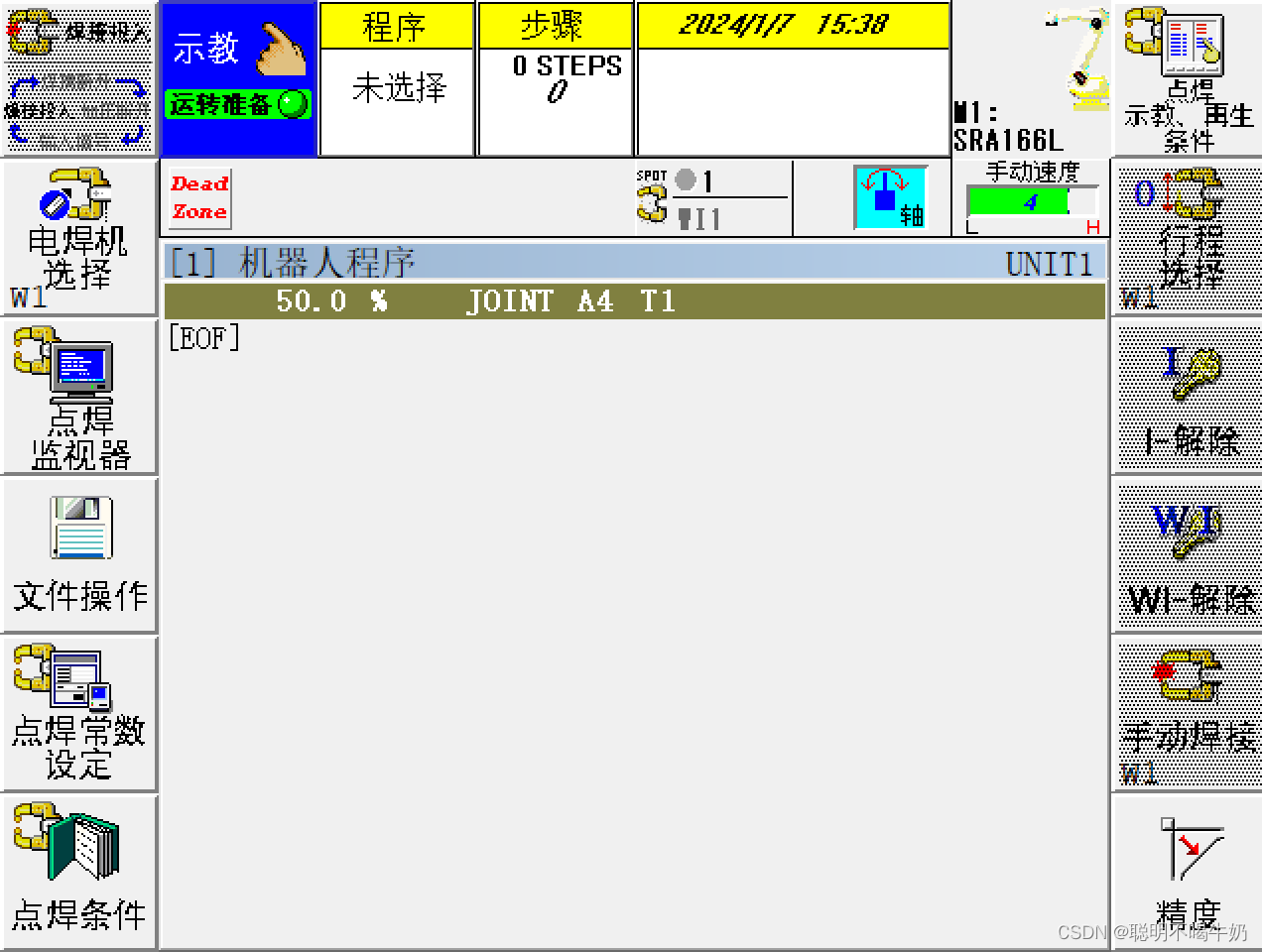
NACHI机器人模拟示教器如何切换中文
前言 现在开始学习机器人的编程语言,那么要学习会用首先得用模拟示教器来学习,但是全是英文确实比较难受一些些,没有中文来的直观。所以摸透一下如何给示教器更换语言。 具体步骤 步骤一:将中文的汉化包下载下来。具体的下载链…...
用通俗易懂的方式讲解:使用 Mistral-7B 和 Langchain 搭建基于PDF文件的聊天机器人
在本文中,使用LangChain、HuggingFaceEmbeddings和HuggingFace的Mistral-7B LLM创建一个简单的Python程序,可以从任何pdf文件中回答问题。 一、LangChain简介 LangChain是一个在语言模型之上开发上下文感知应用程序的框架。LangChain使用带prompt和few…...
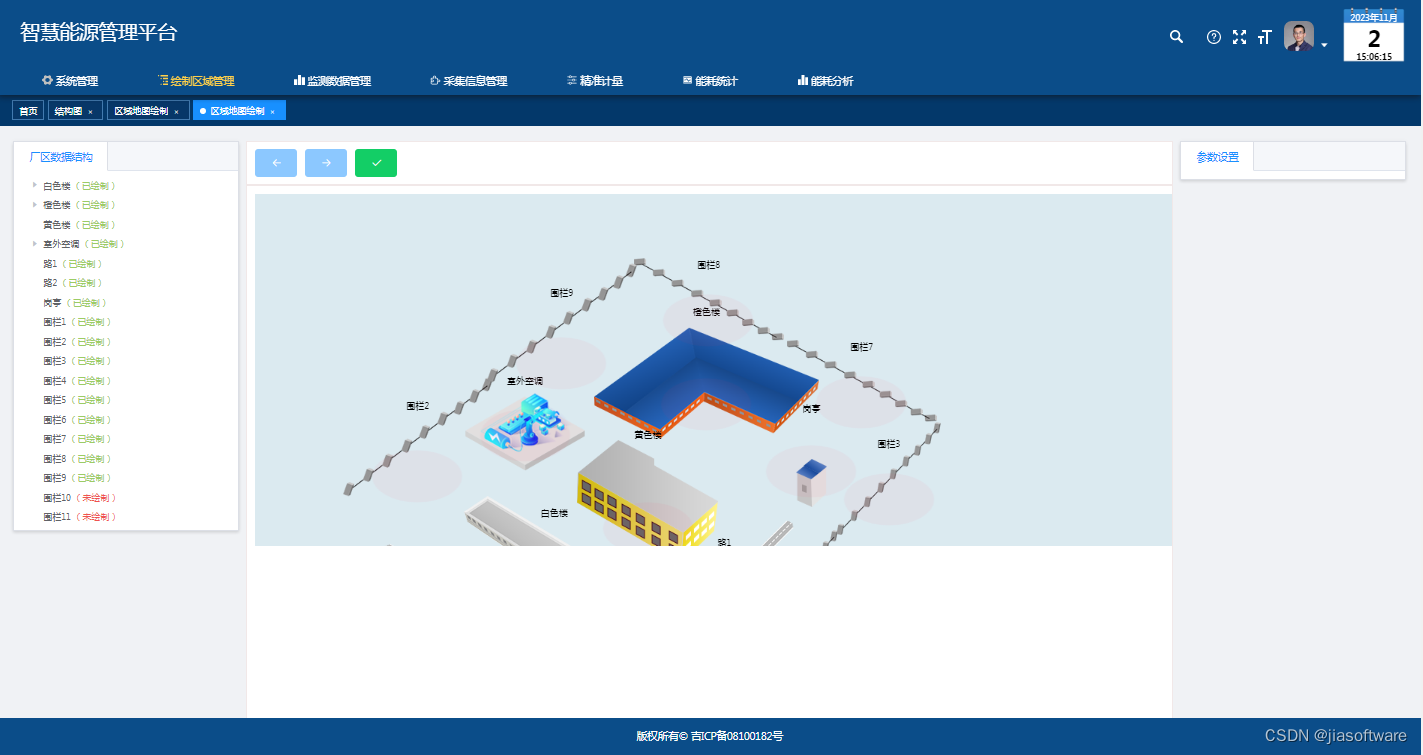
综合智慧能源监测管理平台,实现能源管理“透明”化
能源问题是全球面临的最大问题,在提高经济增长的同时,也引发了能源供应危机及环境严重等问题,降低能源管理、低碳环保是我们未来发展的必经之路。 为了解决这一问题,智慧能源管理平台应运而生。平台采用微服务架构,整…...

【大数据进阶第三阶段之Datax学习笔记】使用阿里云开源离线同步工具DataX 实现数据同步
【大数据进阶第三阶段之Datax学习笔记】阿里云开源离线同步工具Datax概述 【大数据进阶第三阶段之Datax学习笔记】阿里云开源离线同步工具Datax快速入门 【大数据进阶第三阶段之Datax学习笔记】阿里云开源离线同步工具Datax类图 【大数据进阶第三阶段之Datax学习笔记】使用…...

kotlin chunked 和 windowed
kotlin chunked的作用 将集合按照指定的数量分割成多个结合 val numbers listOf(0,1,2,3,4,5,6,7,8,9) //把集合按照一个结合3个元素分割 Log.d("chunked", numbers.chunked(3).toString()) // 打印结果 [[0, 1, 2], [3, 4, 5], [6, 7, 8], [9]] kotlin windowed…...
C语言光速入门笔记
C语言是一门面向过程的编译型语言,它的运行速度极快,仅次于汇编语言。C语言是计算机产业的核心语言,操作系统、硬件驱动、关键组件、数据库等都离不开C语言;不学习C语言,就不能了解计算机底层。 目录 C语言介绍C语言特…...

Flutter+Go_Router+Fluent_Ui仿阿里网盘桌面软件开发跨平台实战-买就送仿小米app开发
Flutter是谷歌公司开发的一款开源、免费的UI框架,可以让我们快速的在Android和iOS上构建高质量App。它最大的特点就是跨平台、以及高性能。 目前 Flutter 已经支持 iOS、Android、Web、Windows、macOS、Linux 的跨平台开发。 Flutter官方介绍,目前Flutte…...
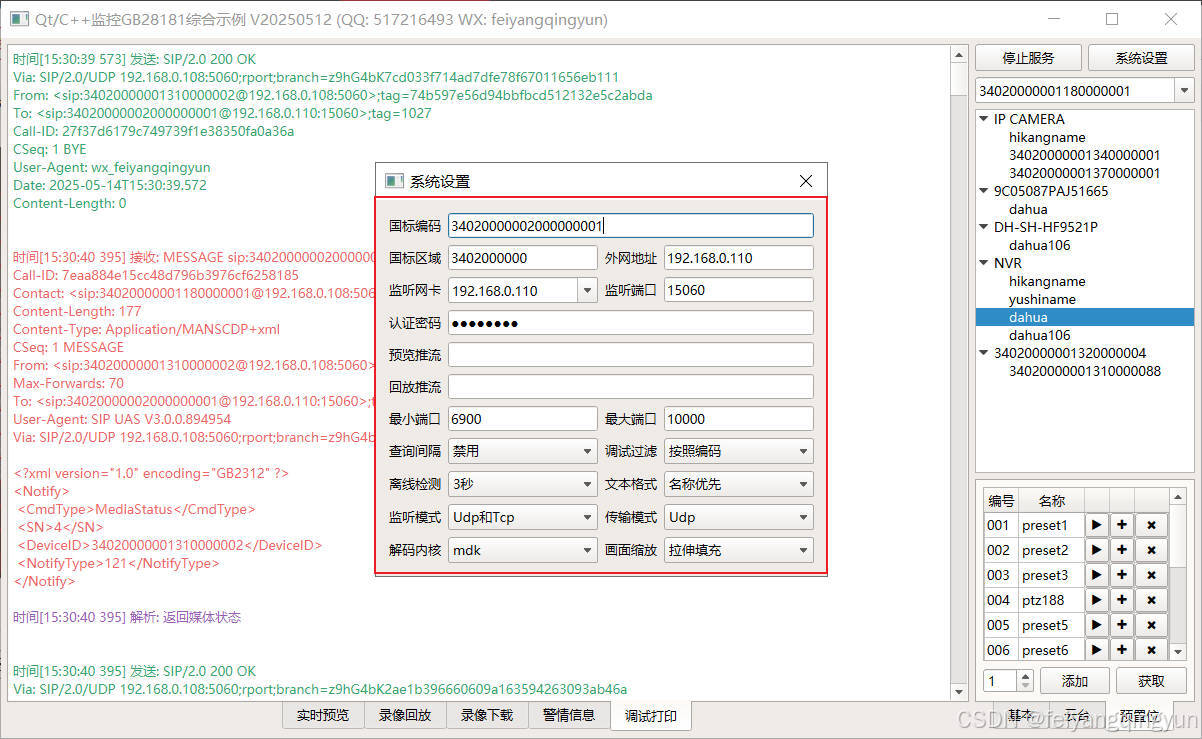
Qt/C++开发监控GB28181系统/取流协议/同时支持udp/tcp被动/tcp主动
一、前言说明 在2011版本的gb28181协议中,拉取视频流只要求udp方式,从2016开始要求新增支持tcp被动和tcp主动两种方式,udp理论上会丢包的,所以实际使用过程可能会出现画面花屏的情况,而tcp肯定不丢包,起码…...

Qt Widget类解析与代码注释
#include "widget.h" #include "ui_widget.h"Widget::Widget(QWidget *parent): QWidget(parent), ui(new Ui::Widget) {ui->setupUi(this); }Widget::~Widget() {delete ui; }//解释这串代码,写上注释 当然可以!这段代码是 Qt …...

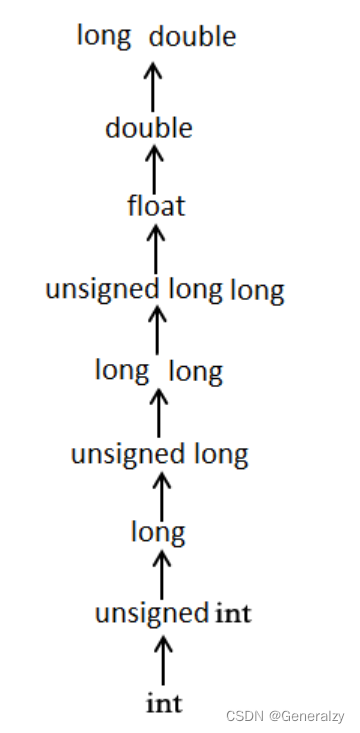
Java - Mysql数据类型对应
Mysql数据类型java数据类型备注整型INT/INTEGERint / java.lang.Integer–BIGINTlong/java.lang.Long–––浮点型FLOATfloat/java.lang.FloatDOUBLEdouble/java.lang.Double–DECIMAL/NUMERICjava.math.BigDecimal字符串型CHARjava.lang.String固定长度字符串VARCHARjava.lang…...

基础测试工具使用经验
背景 vtune,perf, nsight system等基础测试工具,都是用过的,但是没有记录,都逐渐忘了。所以写这篇博客总结记录一下,只要以后发现新的用法,就记得来编辑补充一下 perf 比较基础的用法: 先改这…...
Module Federation 和 Native Federation 的比较
前言 Module Federation 是 Webpack 5 引入的微前端架构方案,允许不同独立构建的应用在运行时动态共享模块。 Native Federation 是 Angular 官方基于 Module Federation 理念实现的专为 Angular 优化的微前端方案。 概念解析 Module Federation (模块联邦) Modul…...

解决本地部署 SmolVLM2 大语言模型运行 flash-attn 报错
出现的问题 安装 flash-attn 会一直卡在 build 那一步或者运行报错 解决办法 是因为你安装的 flash-attn 版本没有对应上,所以报错,到 https://github.com/Dao-AILab/flash-attention/releases 下载对应版本,cu、torch、cp 的版本一定要对…...

JDK 17 新特性
#JDK 17 新特性 /**************** 文本块 *****************/ python/scala中早就支持,不稀奇 String json “”" { “name”: “Java”, “version”: 17 } “”"; /**************** Switch 语句 -> 表达式 *****************/ 挺好的ÿ…...
)
C++课设:简易日历程序(支持传统节假日 + 二十四节气 + 个人纪念日管理)
名人说:路漫漫其修远兮,吾将上下而求索。—— 屈原《离骚》 创作者:Code_流苏(CSDN)(一个喜欢古诗词和编程的Coder😊) 专栏介绍:《编程项目实战》 目录 一、为什么要开发一个日历程序?1. 深入理解时间算法2. 练习面向对象设计3. 学习数据结构应用二、核心算法深度解析…...
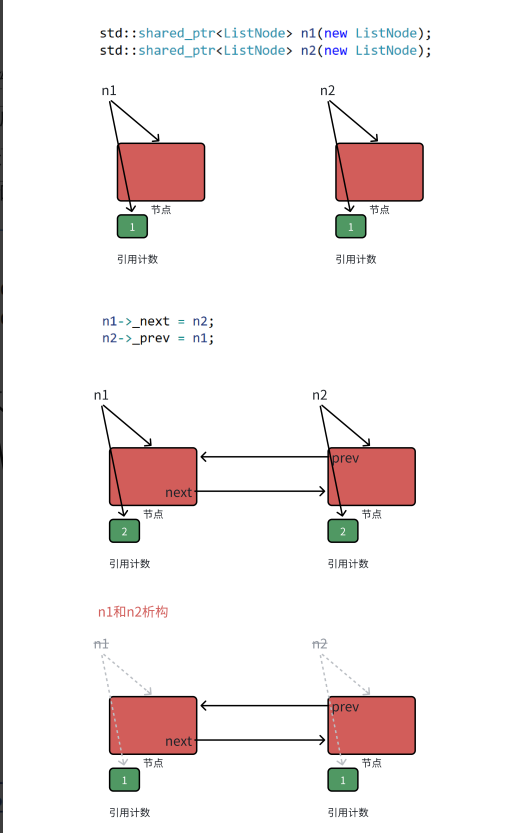
【C++进阶篇】智能指针
C内存管理终极指南:智能指针从入门到源码剖析 一. 智能指针1.1 auto_ptr1.2 unique_ptr1.3 shared_ptr1.4 make_shared 二. 原理三. shared_ptr循环引用问题三. 线程安全问题四. 内存泄漏4.1 什么是内存泄漏4.2 危害4.3 避免内存泄漏 五. 最后 一. 智能指针 智能指…...

Bean 作用域有哪些?如何答出技术深度?
导语: Spring 面试绕不开 Bean 的作用域问题,这是面试官考察候选人对 Spring 框架理解深度的常见方式。本文将围绕“Spring 中的 Bean 作用域”展开,结合典型面试题及实战场景,帮你厘清重点,打破模板式回答,…...