一文初步了解slam技术
本文初步介绍slam技术,主要是slam技术的概述,涉及技术原理、应用场景、分类、以及各自优缺点,和slam技术的未来展望。
🎬个人简介:一个全栈工程师的升级之路!
📋个人专栏:slam精进之路
🎀CSDN主页 发狂的小花
🌄人生秘诀:学习的本质就是极致重复!
目录
一、引言
1 SLAM技术概述
1.1 SLAM定义
1.2 SLAM原理
2 SLAM技术应用领域
2.1 机器人领域
2.2 自动驾驶
2.3 增强现实
2.4 无人机
二、SLAM技术基础
1 SLAM技术定义
2 SLAM技术分类
2.1 基于传感器的类型
2.2 基于实现方法
2.3 基于应用场景
3 SLAM技术常用算法
3.1 扩展卡尔曼滤波(EKF)
3.2 粒子滤波(PF)
3.3 图优化
3.4 直接法
三、视觉SLAM技术详解
1 视觉SLAM技术原理
2 视觉SLAM技术实现流程
3 视觉SLAM技术优缺点分析
四、激光SLAM技术详解
1 激光SLAM技术原理
2 激光SLAM技术实现流程
3 激光SLAM技术优缺点分析
五、SLAM技术应用案例
1 机器人自主导航
2 增强现实
3 虚拟现实
4 无人机航拍定位
六、SLAM技术挑战与未来发展
1 SLAM技术面临挑战
2 SLAM技术发展趋势预测
3 SLAM技术创新方向探讨
一、引言
1 SLAM技术概述
1.1 SLAM定义
SLAM(Simultaneous Localization and Mapping)即同时定位与地图构建,是一种通过传感器数据实时估计机器人自身位置和构建环境地图的技术。
1.2 SLAM原理
SLAM技术通过处理传感器数据(如激光雷达、摄像头等)来估计机器人位姿(位置和姿态)并构建环境地图。其核心问题包括数据关联、状态估计和地图表示。
2 SLAM技术应用领域
2.1 机器人领域

SLAM技术是机器人自主导航、路径规划和环境感知的关键技术之一,广泛应用于家用机器人、服务机器人和工业机器人等。
2.2 自动驾驶
SLAM技术可用于自动驾驶汽车的定位、导航和环境感知,提高自动驾驶系统的安全性和可靠性。
2.3 增强现实
SLAM技术可将虚拟信息与真实环境相结合,为用户提供沉浸式的增强现实体验。
2.4 无人机
SLAM技术可用于无人机的自主飞行、避障和地图构建等任务,提高无人机的智能化水平。
二、SLAM技术基础
1 SLAM技术定义
SLAM(Simultaneous Localization and Mapping)技术,即同时定位与地图构建技术,是指机器人或无人系统在未知环境中,通过自身携带的传感器获取环境信息,并实时地确定自身在环境中的位置和姿态,同时构建环境的地图模型。
SLAM技术是机器人实现自主导航、环境感知和交互等智能行为的基础,被广泛应用于机器人、自动驾驶、无人机、虚拟现实等领域。
2 SLAM技术分类
2.1 基于传感器的类型
激光SLAM和视觉SLAM。激光SLAM采用激光雷达作为主要传感器,通过激光扫描获取环境信息;视觉SLAM则采用相机作为主要传感器,通过图像处理和分析获取环境信息。
2.2 基于实现方法
基于滤波的方法和基于优化的方法。基于滤波的方法通过概率统计的方式估计机器人的位姿和地图,常用算法有扩展卡尔曼滤波(EKF)、粒子滤波(PF)等;基于优化的方法则通过最小化误差函数的方式求解机器人的位姿和地图,常用算法有图优化、直接法等。
2.3 基于应用场景
室内SLAM和室外SLAM。室内SLAM主要针对室内环境,如家庭、办公室、商场等;室外SLAM则针对室外环境,如城市、乡村、山区等。
3 SLAM技术常用算法
3.1 扩展卡尔曼滤波(EKF)
EKF是一种基于概率统计的滤波算法,适用于非线性系统。它通过泰勒级数展开将非线性系统线性化,然后利用卡尔曼滤波进行状态估计。
3.2 粒子滤波(PF)
PF是一种基于蒙特卡罗方法的滤波算法,适用于非线性非高斯系统。它通过随机采样生成一组粒子,每个粒子代表机器人可能的一个状态,然后根据传感器观测更新粒子的权重,最终得到机器人状态的估计结果。
3.3 图优化
图优化是一种基于图论的优化算法,适用于大规模复杂环境的SLAM问题。它将SLAM问题转化为一个图优化问题,通过最小化图中所有边的误差之和来求解机器人的位姿和地图。
3.4 直接法
直接法是一种基于图像处理的视觉SLAM算法,适用于特征缺乏或运动模糊等场景。它直接利用像素灰度信息进行位姿估计和地图构建,避免了特征提取和匹配的过程。
三、视觉SLAM技术详解
1 视觉SLAM技术原理
(1)特征提取与匹配
从图像中提取特征点,并在不同帧之间进行匹配,构建特征点的运动轨迹。
(2)相机位姿估计

利用特征点的运动轨迹,估计相机的位置和姿态,即相机的外参。
(3)地图构建与优化
根据估计的相机位姿,构建三维地图,并对地图进行优化,提高地图的精度和鲁棒性。
2 视觉SLAM技术实现流程
(1)初始化
确定初始相机位姿和初始地图。
(2)追踪
通过特征提取和匹配,追踪特征点在图像序列中的运动轨迹。
(3)地图更新
根据追踪结果,更新三维地图。
(4)重定位
在追踪失败时,利用已有地图进行重定位,恢复追踪。
3 视觉SLAM技术优缺点分析

优点:
(1)不依赖外部传感器,仅通过相机即可实现定位和地图构建。
(2)适用于室内外多种场景,具有广泛的应用前景。
(3)可以构建稠密的三维地图,提供丰富的环境信息。
缺点:
(1)对光照、纹理等环境因素敏感,鲁棒性有待提高。
(2)在大尺度、复杂动态场景下性能受限。
(3)实时性要求较高,需要高效的算法和硬件支持。
四、激光SLAM技术详解
1 激光SLAM技术原理

(1)激光测距原理
通过发射激光束并测量其反射回来的时间,计算出与周围物体的距离。
(2)位姿估计原理
利用激光雷达获取的环境点云数据,通过匹配算法估计机器人在环境中的位置和姿态。
(3)地图构建原理
根据位姿估计结果和激光点云数据,构建环境的地图模型。
2 激光SLAM技术实现流程

3 激光SLAM技术优缺点分析



优点:
(1)高精度
激光SLAM技术具有较高的测量精度和定位精度,能够满足复杂环境下的导航需求。
(2)高稳定性
由于激光雷达不易受光照、颜色等因素的影响,因此激光SLAM技术在不同环境下的稳定性较高。
(3)适用范围广
激光SLAM技术适用于室内外多种场景,如家庭、办公室、工厂等。
缺点:
(1)高成本
激光雷达的价格较高,导致激光SLAM技术的成本也相对较高。
(2)受环境结构影响
在结构特征不明显的环境中,如长廊、隧道等,激光SLAM技术的性能可能会受到影响。
(3)数据处理量大
激光点云数据量较大,对计算资源的需求较高,可能需要高性能计算机或服务器进行处理。
五、SLAM技术应用案例
1 机器人自主导航
(1)地图构建

利用SLAM技术,机器人可以在未知环境中实时构建地图,为自主导航提供基础。
(2)定位与导航

结合构建的地图和传感器数据,机器人可以实现自主定位与导航,避开障碍物并到达指定位置。
(3)路径规划

基于已知地图和实时传感器信息,机器人可以进行路径规划,选择最优路径到达目的地。
2 增强现实



(1)实时跟踪
SLAM技术可用于增强现实中的实时跟踪,将虚拟对象与真实环境相结合,保持虚拟对象的稳定性和准确性。
(2)场景理解
通过对真实环境的感知和理解,SLAM可以为增强现实应用提供更丰富的场景信息,提升用户体验。
(3)多用户协同
在多用户场景中,SLAM可以实现不同用户之间的空间定位和协同,使增强现实应用更具互动性和社交性。
3 虚拟现实
(1)空间定位
在虚拟现实中,SLAM技术可以帮助用户实现空间定位,将用户的真实位置与虚拟场景相结合。
(2)手势识别
结合深度相机等传感器,SLAM可以用于手势识别,为用户提供更自然的交互方式。
(3)场景重建
利用SLAM技术,可以将真实环境重建为虚拟场景,为用户提供沉浸式的虚拟现实体验。
4 无人机航拍定位
(1)精准定位
无人机利用SLAM技术可以实现精准定位,即使在GPS信号不佳的情况下也能保持稳定的飞行。
(2)地图构建与导航
无人机通过SLAM技术构建环境地图,实现自主导航和避障功能。
(3)目标跟踪
结合视觉传感器和SLAM技术,无人机可以实现目标跟踪和拍摄,为航拍提供更高质量的服务。
六、SLAM技术挑战与未来发展
1 SLAM技术面临挑战
(1)复杂动态环境感知
在复杂、动态的环境中,如人流密集、光照变化等场景,SLAM技术需要解决实时、准确的感知问题。
(2)高精度地图构建
构建高精度、全局一致的地图是SLAM技术的核心任务之一,但在大规模环境中实现高精度地图构建仍具有挑战性。
(3)实时性能优化
SLAM技术需要满足实时性要求,在保证精度的同时,优化算法性能,提高运算效率。
2 SLAM技术发展趋势预测
(1)多传感器融合
未来SLAM技术将更加注重多传感器融合,如激光雷达、摄像头、IMU等,以提高感知能力和鲁棒性。
(2)深度学习结合
深度学习在特征提取、数据分类等方面具有优势,与SLAM技术结合有望提高地图构建和定位精度。
(3)语义SLAM
利用深度学习进行语义分割和识别,为SLAM提供更高层次的环境理解,实现更加智能的导航和定位。
3 SLAM技术创新方向探讨
(1)轻量级SLAM
针对资源受限的设备,如手机、无人机等,研究轻量级SLAM算法,实现在保证性能的同时降低计算资源消耗。
(2)长期自主定位
解决SLAM技术在长期运行过程中的累积误差问题,实现更加稳定和可靠的自主定位。
(3)多机器人协同SLAM
研究多机器人协同SLAM技术,实现多个机器人之间的信息共享和协同定位,提高整体系统性能。
🌈我的分享也就到此结束啦🌈
如果我的分享也能对你有帮助,那就太好了!
若有不足,还请大家多多指正,我们一起学习交流!
📢未来的富豪们:点赞👍→收藏⭐→关注🔍,如果能评论下就太惊喜了!
感谢大家的观看和支持!最后,☺祝愿大家每天有钱赚!!!欢迎关注、关注!
相关文章:
一文初步了解slam技术
本文初步介绍slam技术,主要是slam技术的概述,涉及技术原理、应用场景、分类、以及各自优缺点,和slam技术的未来展望。 🎬个人简介:一个全栈工程师的升级之路! 📋个人专栏:slam精进之…...
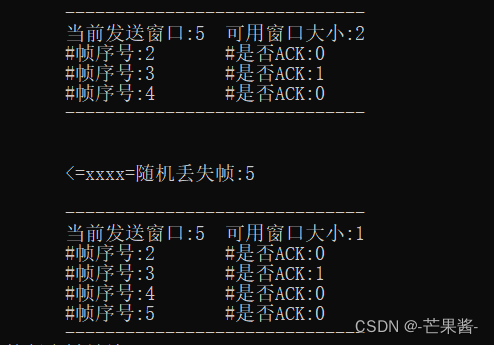
滑动窗口协议仿真(2024)
1.题目描述 滑动窗口协议以基于分组的数据传输协议为特征,该协议适用于在数据链路层以及传输层中对按 顺序传送分组的可靠性要求较高的环境。在长管道传输过程(特别是无线环境)中,相应的滑动窗口 协议可实现高效的重传恢复。附录 …...

uniapp上传文件时用到的api是什么?格式是什么?
在UniApp中,你可以使用uni.uploadFile()方法来上传文件。这是一个异步方法,用于将本地资源上传到服务器。 该方法的基本格式如下: uni.uploadFile({url: 上传接口地址,filePath: 要上传的文件路径,name: 后端接收的文件参数名,formData: {/…...
Java面试——框架篇
1、Spring框架中的单例bean是线程安全的吗? 所谓单例就是所有的请求都用一个对象来处理,而多例则指每个请求用一个新的对象来处理。 结论:线程不安全。 Spring框架中有一个Scope注解,默认的值就是singleton,单例的。一…...

GO语言笔记1-安装与hello world
SDK开发工具包下载 Go语言官网地址:golang.org,无法访问Golang中文社区:首页 - Go语言中文网 - Golang中文社区下载地址:Go下载 - Go语言中文网 - Golang中文社区 尽量去下载稳定版本,根据使用系统下载压缩包格式的安装…...
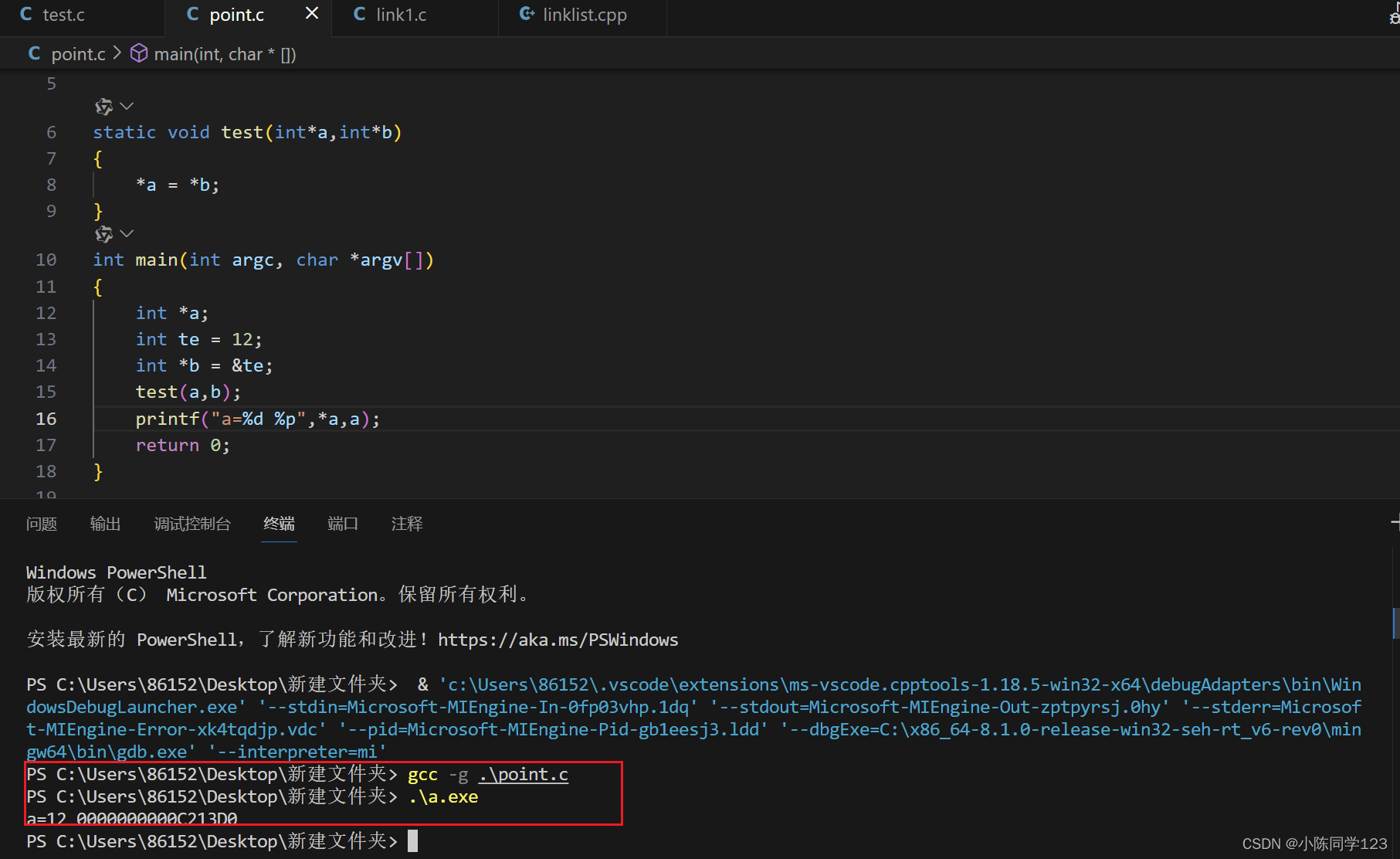
指针传参误区
C语言中指针作为形参传递时,func(*a, *b) 这种形式的话,是无法通过简单的 ab来修改的,在函数体内a的地址确实被修改成b的地址了,但是当函数执行结束时,a的地址会重新回到原本的地址里面…...
力扣-42.接雨水
题目: 给定 n 个非负整数表示每个宽度为 1 的柱子的高度图,计算按此排列的柱子,下雨之后能接多少雨水。 示例 1: 输入:height [0,1,0,2,1,0,1,3,2,1,2,1] 输出:6 解释:上面是由数组[0,1,0,2…...
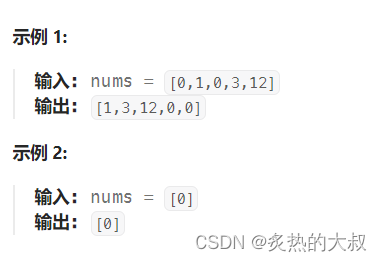
LeetCode-移动零(283)
题目描述: 给定一个数组 nums,编写一个函数将所有 0 移动到数组的末尾,同时保持非零元素的相对顺序。 请注意 ,必须在不复制数组的情况下原地对数组进行操作。 思路: 这里的思路跟以前做过的去重复数字的思路有点像&…...
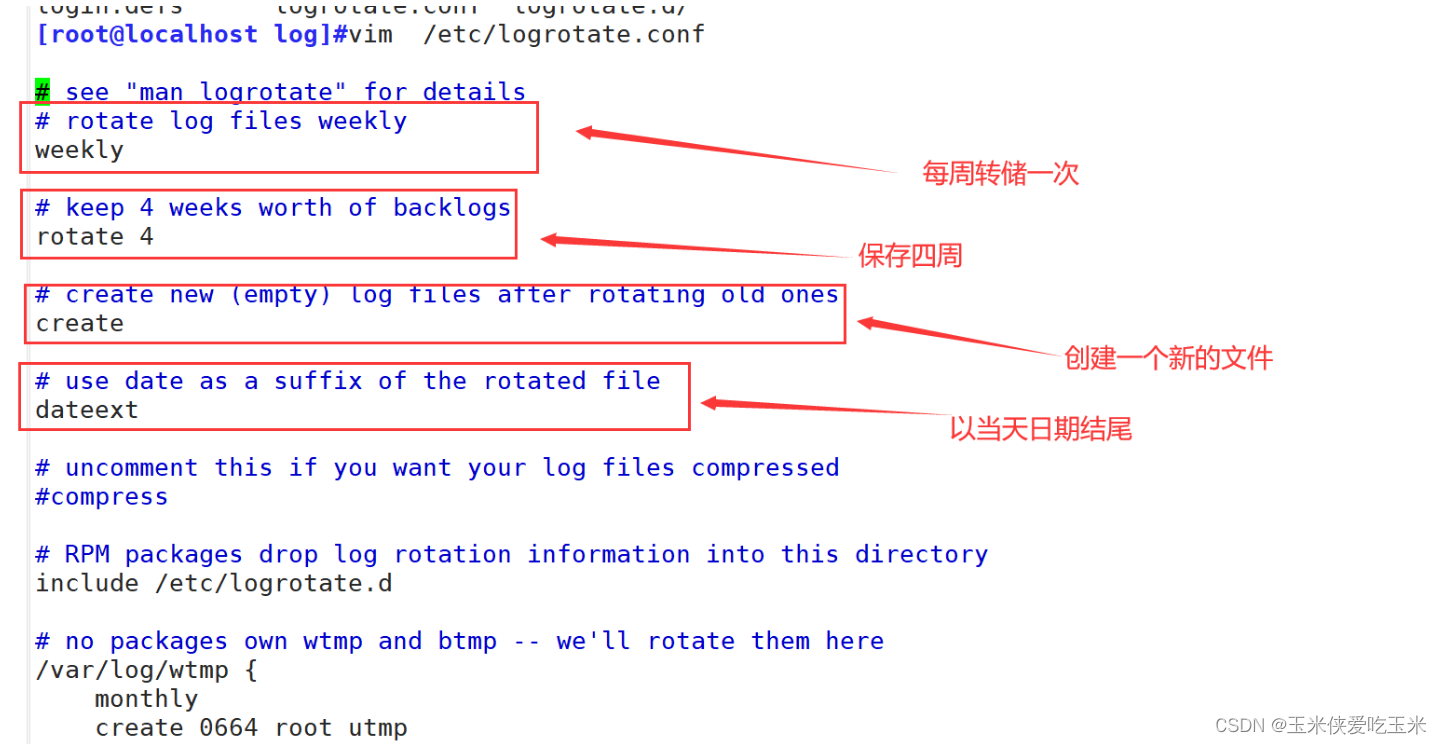
文件系统与日志分析
一,文件系统 (一)inode 和block概述 1,文件数据包括元信息与实际数据 2,文件存储在硬盘上,硬盘最小存储单位是“扇区”,每个扇区存储512字节 3,block (块) 连续的八个扇区组成一…...
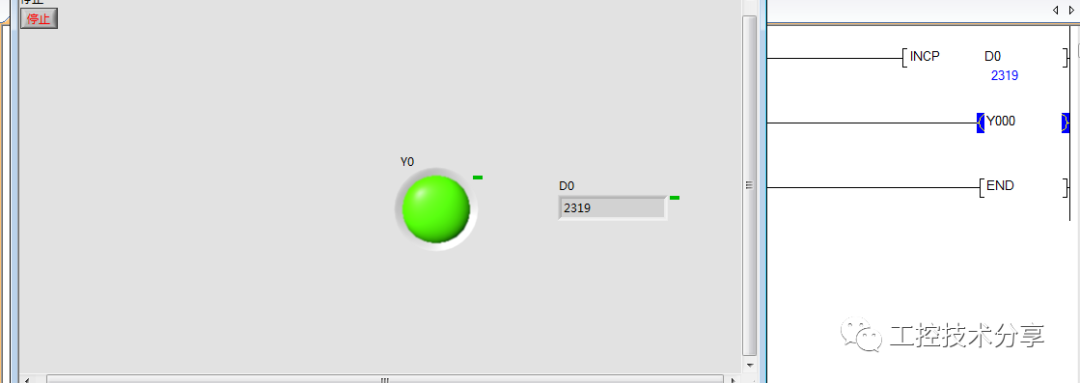
labview 与三菱FX 小型PLC通信(OPC)
NI OPC服务器与三菱FX3U PLC通讯方法 一、新建通道名称为:MIT 二、选择三菱FX系列 三、确认端口号相关的参数(COM端:7.波特率:9600,数据位:7,校验:奇校验,停止位…...

掌握Linux网络配置:价格亲民,操作简便!
前言 在Linux系统中,网络配置是实现连接、通信和安全的重要一环。无论你是初学者还是有经验的用户,掌握网络配置命令能帮助你轻松管理网络接口、设置IP地址以及查看连接状态。以下是一些关键命令和示例,让你快速掌握网络操作的精髓ÿ…...
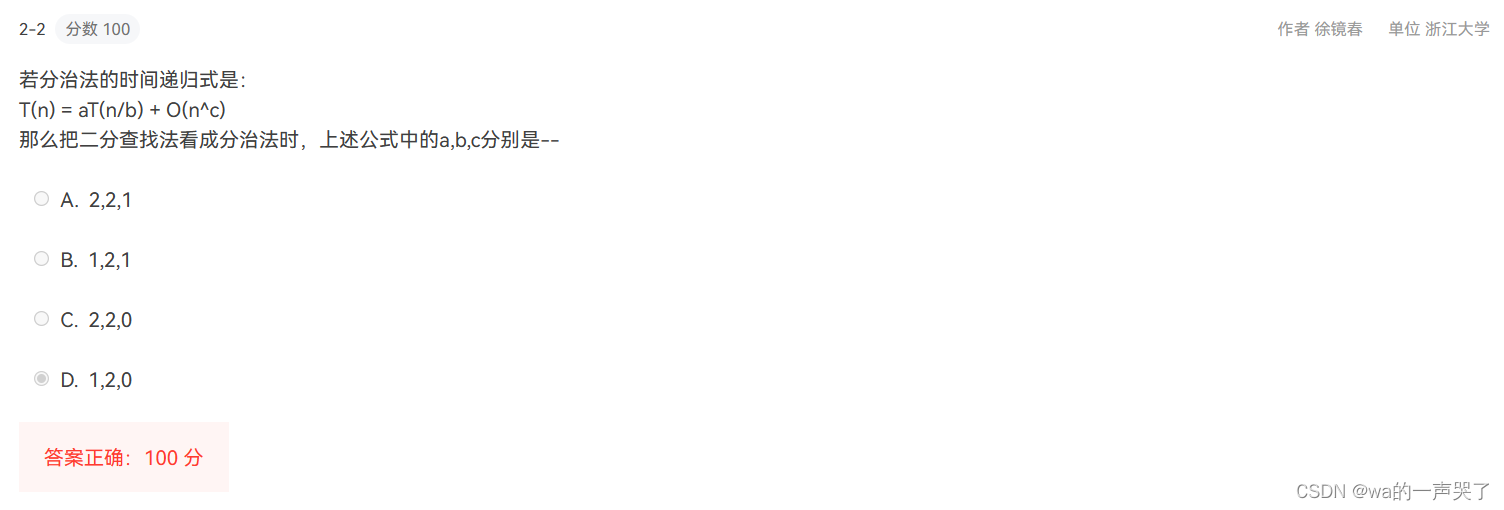
郑州大学算法设计与分析实验2
判断题 1 #include<bits/stdc.h> using namespace std;const int N 50; int f[N], n;int main() { // freopen("1.in", "r", stdin);ios::sync_with_stdio(false);cin.tie(0);cout.tie(0);cin >> n;f[1] 1; f[2] 1;for(int i 3; i &l…...

【CMake】1. VSCode 开发环境安装与运行
CMake 示例工程代码 https://github.com/LABELNET/cmake-simple 插件 使用 VSCode 开发C项目,安装 CMake 插件 CMakeCMake ToolsCMake Language Support (建议,语法提示) 1. 配置 CMake Language Support , Windows 配置 donet 环境 这…...

使用vue3+<script setup>+element-plus中el-table前端切片完成分页效果
<template><div><el-table :data"visibleData" :row-key"row > row.id"><el-table-column prop"name" label"姓名"></el-table-column><el-table-column prop"age" label"年龄&qu…...

vue 中 computed 和 watch 的区别
在Vue中,computed和watch都是用于监听数据的变化,并且根据变化做出相应的反应。 computed是一个计算属性,它会根据依赖的数据的变化自动计算得出一个新的值,并且具有缓存的特性。当依赖的数据发生变化时,computed属性…...
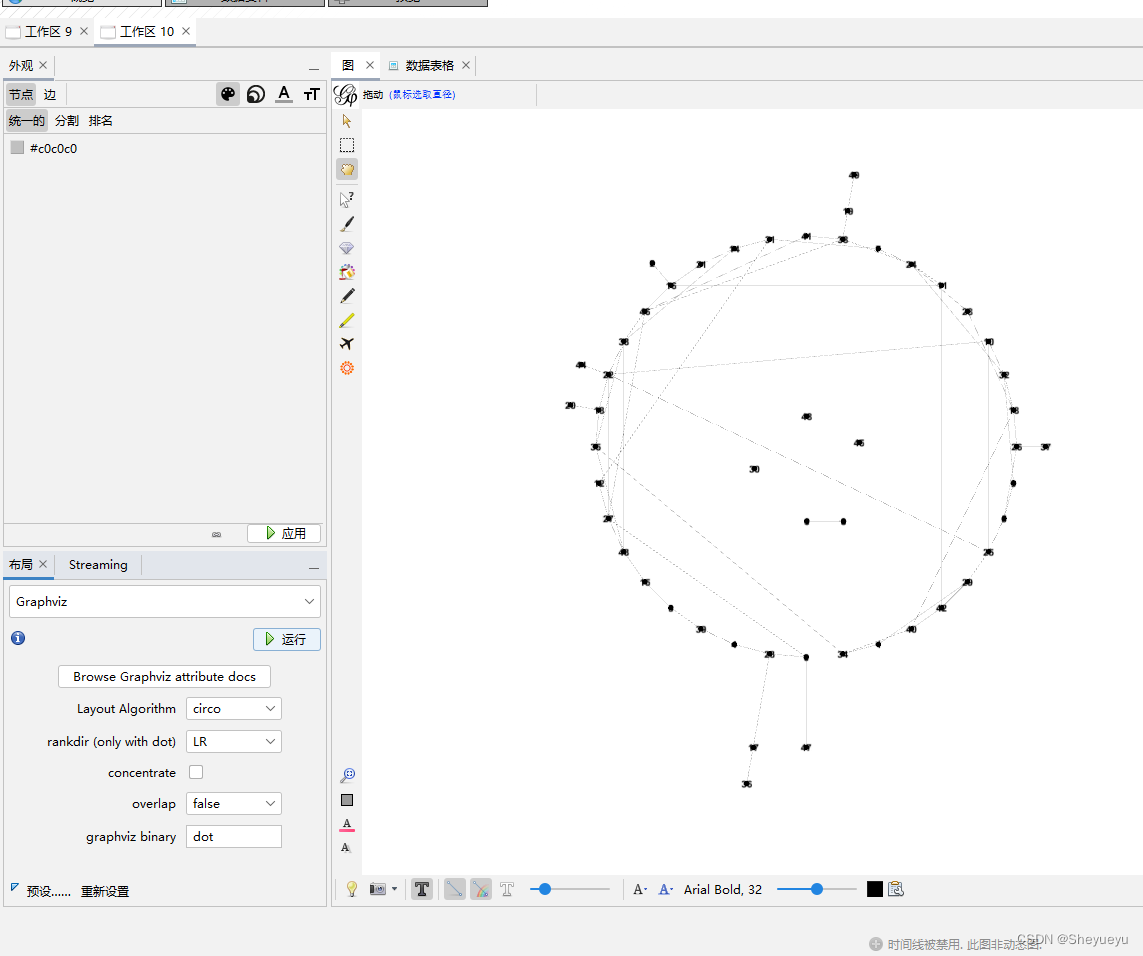
gephi——graphviz插件设置
gephi_graphviz插件设置 以下是我总结出来的一点经验 1. 安装graphviz软件,请见作者其他博客 2. 安装gephi 插件,并激活 3. 运行graphviz布局,会遇到找不到dot问题 问题描述:Graphviz process error X There was an error launc…...
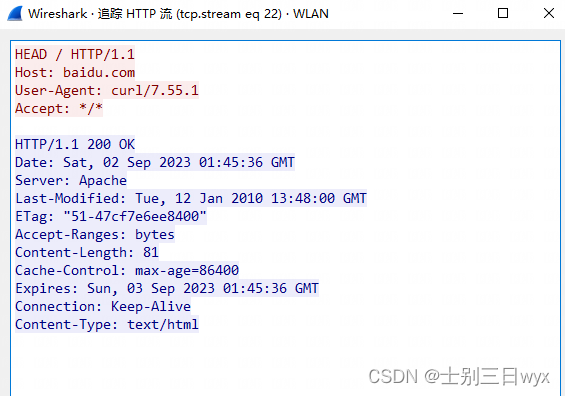
wireshark抓包分析HTTP协议,HTTP协议执行流程,
「作者主页」:士别三日wyx 「作者简介」:CSDN top100、阿里云博客专家、华为云享专家、网络安全领域优质创作者 「推荐专栏」:对网络安全感兴趣的小伙伴可以关注专栏《网络安全入门到精通》 使用WireShark工具抓取「HTTP协议」的数据包&#…...
Linux第13步_安装“vim编辑器”及应用介绍
学习“磁盘重新分区”后,嵌入式Linux系统环境搭建进入安装“vim编辑器”这个环节。vim编辑器可以用来修改文件,在后期使用中,会经常用到。 1、安装“vim编辑器” 输入“sudo apt-get install vim回车”,就可以执行安装“vim编辑…...

Yapi安装配置(CentOs)
环境要求 nodejs(7.6) mongodb(2.6) git 准备工作 清除yum命令缓存 sudo yum clean all卸载低版本nodejs yum remove nodejs npm -y安装nodejs,获取资源,安装高版本nodejs curl -sL https://rpm.nodesource.com/setup_8.x | bash - #安装 s…...
_08_FTP协议【8道题】)
HCIA-Datacom题库(自己整理分类的)_08_FTP协议【8道题】
一、单选 1.在使用FTP协议升级路由器软件时,传输模式应该选用___ 二进制模式 字节模式 文字模式 流字节模式 解析:二进制模式:在数据连接中传输,不对数据进行任何处理,不需要转换或格式化就可以传输字符。 2.以…...

挑战杯推荐项目
“人工智能”创意赛 - 智能艺术创作助手:借助大模型技术,开发能根据用户输入的主题、风格等要求,生成绘画、音乐、文学作品等多种形式艺术创作灵感或初稿的应用,帮助艺术家和创意爱好者激发创意、提高创作效率。 - 个性化梦境…...

【Oracle APEX开发小技巧12】
有如下需求: 有一个问题反馈页面,要实现在apex页面展示能直观看到反馈时间超过7天未处理的数据,方便管理员及时处理反馈。 我的方法:直接将逻辑写在SQL中,这样可以直接在页面展示 完整代码: SELECTSF.FE…...

基于Flask实现的医疗保险欺诈识别监测模型
基于Flask实现的医疗保险欺诈识别监测模型 项目截图 项目简介 社会医疗保险是国家通过立法形式强制实施,由雇主和个人按一定比例缴纳保险费,建立社会医疗保险基金,支付雇员医疗费用的一种医疗保险制度, 它是促进社会文明和进步的…...
HTML 列表、表格、表单
1 列表标签 作用:布局内容排列整齐的区域 列表分类:无序列表、有序列表、定义列表。 例如: 1.1 无序列表 标签:ul 嵌套 li,ul是无序列表,li是列表条目。 注意事项: ul 标签里面只能包裹 li…...

Java面试专项一-准备篇
一、企业简历筛选规则 一般企业的简历筛选流程:首先由HR先筛选一部分简历后,在将简历给到对应的项目负责人后再进行下一步的操作。 HR如何筛选简历 例如:Boss直聘(招聘方平台) 直接按照条件进行筛选 例如:…...
九天毕昇深度学习平台 | 如何安装库?
pip install 库名 -i https://pypi.tuna.tsinghua.edu.cn/simple --user 举个例子: 报错 ModuleNotFoundError: No module named torch 那么我需要安装 torch pip install torch -i https://pypi.tuna.tsinghua.edu.cn/simple --user pip install 库名&#x…...
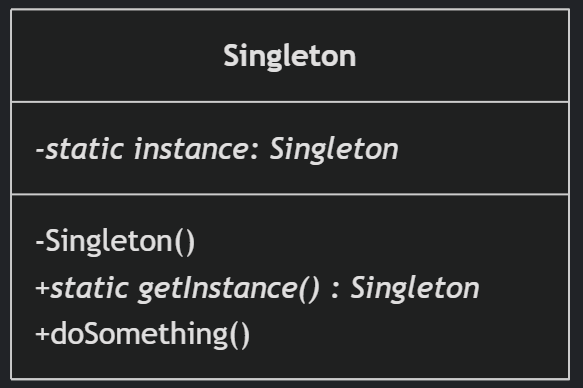
(一)单例模式
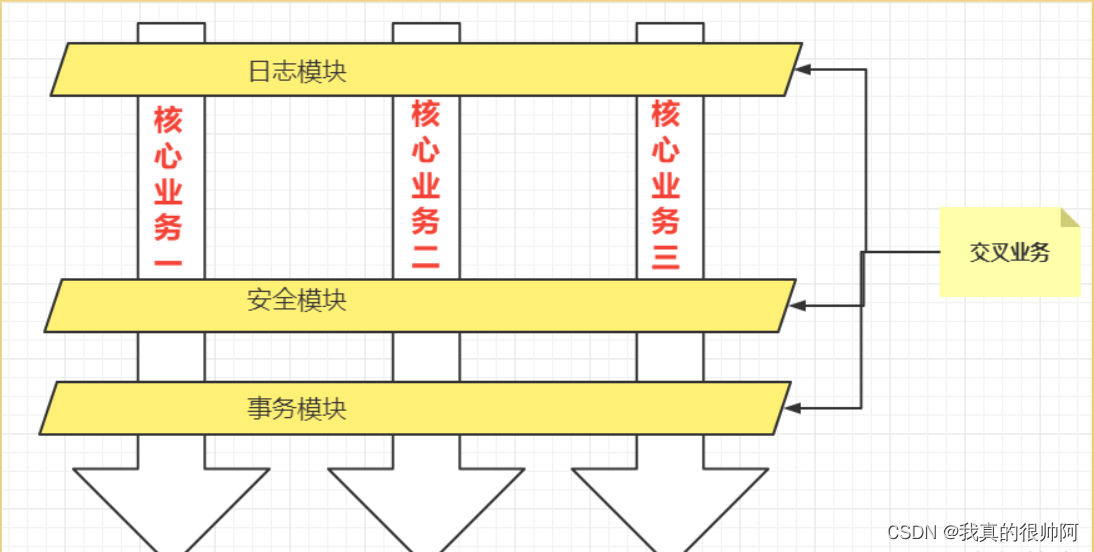
一、前言 单例模式属于六大创建型模式,即在软件设计过程中,主要关注创建对象的结果,并不关心创建对象的过程及细节。创建型设计模式将类对象的实例化过程进行抽象化接口设计,从而隐藏了类对象的实例是如何被创建的,封装了软件系统使用的具体对象类型。 六大创建型模式包括…...

「全栈技术解析」推客小程序系统开发:从架构设计到裂变增长的完整解决方案
在移动互联网营销竞争白热化的当下,推客小程序系统凭借其裂变传播、精准营销等特性,成为企业抢占市场的利器。本文将深度解析推客小程序系统开发的核心技术与实现路径,助力开发者打造具有市场竞争力的营销工具。 一、系统核心功能架构&…...
零知开源——STM32F103RBT6驱动 ICM20948 九轴传感器及 vofa + 上位机可视化教程
STM32F1 本教程使用零知标准板(STM32F103RBT6)通过I2C驱动ICM20948九轴传感器,实现姿态解算,并通过串口将数据实时发送至VOFA上位机进行3D可视化。代码基于开源库修改优化,适合嵌入式及物联网开发者。在基础驱动上新增…...
系统掌握PyTorch:图解张量、Autograd、DataLoader、nn.Module与实战模型
本文较长,建议点赞收藏,以免遗失。更多AI大模型应用开发学习视频及资料,尽在聚客AI学院。 本文通过代码驱动的方式,系统讲解PyTorch核心概念和实战技巧,涵盖张量操作、自动微分、数据加载、模型构建和训练全流程&#…...