[足式机器人]Part3 机构运动学与动力学分析与建模 Ch00-2(2) 质量刚体的在坐标系下运动
本文仅供学习使用,总结很多本现有讲述运动学或动力学书籍后的总结,从矢量的角度进行分析,方法比较传统,但更易理解,并且现有的看似抽象方法,两者本质上并无不同。
2024年底本人学位论文发表后方可摘抄
若有帮助请引用
本文参考:
黎 旭,陈 强 洪,甄 文 强 等.惯 性 张 量 平 移 和 旋 转 复 合 变 换 的 一 般 形 式 及 其 应 用[J].工 程 数 学 学 报,2022,39(06):1005-1011.
食用方法
质量点的动量与角动量
刚体的动量与角动量——力与力矩的关系
惯性矩阵的表达与推导——在刚体运动过程中的作用
惯性矩阵在不同坐标系下的表达
务必自己推导全部公式,并理解每个符号的含义
机构运动学与动力学分析与建模 Ch00-2质量刚体的在坐标系下运动Part2
- 2.2.3 欧拉方程 Euler equation
2.2.3 欧拉方程 Euler equation
对式 H ⃗ Σ M / O F \vec{H}_{\Sigma _{\mathrm{M}}/\mathrm{O}}^{F} HΣM/OF进一步分析,有:
H ⃗ Σ M / O F = ∫ R ⃗ O P i F × ( d m i ⋅ d R ⃗ P i F d t ) = ∫ ( ( R ⃗ P i F − R ⃗ O F ) × V ⃗ P i F ) d m i = ∫ ( R ⃗ P i F × V ⃗ P i F ) d m i − ∫ ( R ⃗ O F × V ⃗ P i F ) d m i = H ⃗ Σ M F − R ⃗ O F × P ⃗ G F \begin{split} \vec{H}_{\Sigma _{\mathrm{M}}/\mathrm{O}}^{F}&=\int{\vec{R}_{\mathrm{OP}_{\mathrm{i}}}^{F}\times \left( \mathrm{d}m_i\cdot \frac{\mathrm{d}\vec{R}_{\mathrm{P}_{\mathrm{i}}}^{F}}{\mathrm{d}t} \right)}=\int{\left( \left( \vec{R}_{\mathrm{P}_{\mathrm{i}}}^{F}-\vec{R}_{\mathrm{O}}^{F} \right) \times \vec{V}_{\mathrm{P}_{\mathrm{i}}}^{F} \right) \mathrm{d}m_i} \\ &=\int{\left( \vec{R}_{\mathrm{P}_{\mathrm{i}}}^{F}\times \vec{V}_{\mathrm{P}_{\mathrm{i}}}^{F} \right) \mathrm{d}m_i}-\int{\left( \vec{R}_{\mathrm{O}}^{F}\times \vec{V}_{\mathrm{P}_{\mathrm{i}}}^{F} \right) \mathrm{d}m_i} \\ &=\vec{H}_{\Sigma _{\mathrm{M}}}^{F}-\vec{R}_{\mathrm{O}}^{F}\times \vec{P}_{\mathrm{G}}^{F} \end{split} HΣM/OF=∫ROPiF×(dmi⋅dtdRPiF)=∫((RPiF−ROF)×VPiF)dmi=∫(RPiF×VPiF)dmi−∫(ROF×VPiF)dmi=HΣMF−ROF×PGF
对上式进一步求导,则有:
d H ⃗ Σ M / O F d t = d H ⃗ Σ M F d t − d ( R ⃗ O F × P ⃗ G F ) d t = d H ⃗ Σ M F d t − V ⃗ O F × P ⃗ G F − m t o t a l ⋅ R ⃗ O F × a ⃗ G F \frac{\mathrm{d}\vec{H}_{\Sigma _{\mathrm{M}}/\mathrm{O}}^{F}}{\mathrm{d}t}=\frac{\mathrm{d}\vec{H}_{\Sigma _{\mathrm{M}}}^{F}}{\mathrm{d}t}-\frac{\mathrm{d}\left( \vec{R}_{\mathrm{O}}^{F}\times \vec{P}_{\mathrm{G}}^{F} \right)}{\mathrm{d}t}=\frac{\mathrm{d}\vec{H}_{\Sigma _{\mathrm{M}}}^{F}}{\mathrm{d}t}-\vec{V}_{\mathrm{O}}^{F}\times \vec{P}_{\mathrm{G}}^{F}-m_{\mathrm{total}}\cdot \vec{R}_{\mathrm{O}}^{F}\times \vec{a}_{\mathrm{G}}^{F} dtdHΣM/OF=dtdHΣMF−dtd(ROF×PGF)=dtdHΣMF−VOF×PGF−mtotal⋅ROF×aGF
其中:
H ⃗ Σ M F = ∫ R ⃗ P i F × p ⃗ P i F = ∫ ( R ⃗ G F + R ⃗ G P i F ) × ( d m i ⋅ ( V ⃗ G F + V ⃗ G P i F ) ) = ∫ R ⃗ G F × V ⃗ G F d m i ⏟ m t o t a l ⋅ R ⃗ G F × V ⃗ G F + ∫ R ⃗ G F × V ⃗ G P i F d m i ⏟ 0 + ∫ R ⃗ G P i F × V ⃗ G F d m i ⏟ 0 + ∫ R ⃗ G P i F × V ⃗ G P i F d m i ⏟ ∫ R ⃗ G P i F × ( ω ⃗ M F × R ⃗ G P i F ) d m i = m t o t a l ⋅ R ⃗ G F × V ⃗ G F + ∫ R ⃗ G P i F × ( ω ⃗ M F × R ⃗ G P i F ) d m i = m t o t a l ⋅ R ⃗ G F × V ⃗ G F + ∫ ( R ⃗ G P i F ⋅ R ⃗ G P i F ) ω ⃗ M F d m i − ∫ ( R ⃗ G P i F ⋅ ω ⃗ M F ) R ⃗ G P i F d m i \begin{split} \vec{H}_{\Sigma _{\mathrm{M}}}^{F}&=\int{\vec{R}_{\mathrm{P}_{\mathrm{i}}}^{F}\times \vec{p}_{\mathrm{P}_{\mathrm{i}}}^{F}}=\int{\left( \vec{R}_{\mathrm{G}}^{F}+\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right) \times \left( \mathrm{d}m_i\cdot \left( \vec{V}_{\mathrm{G}}^{F}+\vec{V}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right) \right)} \\ &=\begin{array}{c} \underbrace{\int{\vec{R}_{\mathrm{G}}^{F}\times \vec{V}_{\mathrm{G}}^{F}}\mathrm{d}m_i}\\ m_{\mathrm{total}}\cdot \vec{R}_{\mathrm{G}}^{F}\times \vec{V}_{\mathrm{G}}^{F}\\ \end{array}+\begin{array}{c} \underbrace{\int{\vec{R}_{\mathrm{G}}^{F}\times \vec{V}_{\mathrm{GP}_{\mathrm{i}}}^{F}}\mathrm{d}m_i}\\ 0\\ \end{array}+\begin{array}{c} \underbrace{\int{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\times \vec{V}_{\mathrm{G}}^{F}}\mathrm{d}m_i}\\ 0\\ \end{array}+\begin{array}{c} \underbrace{\int{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\times \vec{V}_{\mathrm{GP}_{\mathrm{i}}}^{F}}\mathrm{d}m_i}\\ \int{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\times \left( \vec{\omega}_{\mathrm{M}}^{F}\times \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right)}\mathrm{d}m_i\\ \end{array} \\ &=m_{\mathrm{total}}\cdot \vec{R}_{\mathrm{G}}^{F}\times \vec{V}_{\mathrm{G}}^{F}+\int{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\times \left( \vec{\omega}_{\mathrm{M}}^{F}\times \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right)}\mathrm{d}m_i \\ &=m_{\mathrm{total}}\cdot \vec{R}_{\mathrm{G}}^{F}\times \vec{V}_{\mathrm{G}}^{F}+\int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right) \vec{\omega}_{\mathrm{M}}^{F}}\mathrm{d}m_i-\int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}\mathrm{d}m_i \end{split} HΣMF=∫RPiF×pPiF=∫(RGF+RGPiF)×(dmi⋅(VGF+VGPiF))= ∫RGF×VGFdmimtotal⋅RGF×VGF+ ∫RGF×VGPiFdmi0+ ∫RGPiF×VGFdmi0+ ∫RGPiF×VGPiFdmi∫RGPiF×(ωMF×RGPiF)dmi=mtotal⋅RGF×VGF+∫RGPiF×(ωMF×RGPiF)dmi=mtotal⋅RGF×VGF+∫(RGPiF⋅RGPiF)ωMFdmi−∫(RGPiF⋅ωMF)RGPiFdmi
将 H ⃗ Σ M F \vec{H}_{\Sigma _{\mathrm{M}}}^{F} HΣMF进一步求导,则有:
d H ⃗ Σ M F d t = { R ⃗ G F × m t o t a l ⋅ a ⃗ G F + 2 ∫ ( V ⃗ P i F ⋅ R ⃗ G P i F ) ω ⃗ M F d m i + ∫ ( R ⃗ G P i F ⋅ R ⃗ G P i F ) α ⃗ M F d m i − ∫ ( V ⃗ G P i F ⋅ ω ⃗ M F ) R ⃗ G P i F d m i − ∫ ( R ⃗ G P i F ⋅ α ⃗ M F ) R ⃗ G P i F d m i − ∫ ( R ⃗ G P i F ⋅ ω ⃗ M F ) V ⃗ G P i F d m i = { R ⃗ G F × m t o t a l ⋅ a ⃗ G F + ( ∫ ( R ⃗ G P i F ⋅ R ⃗ G P i F ) α ⃗ M F d m i − ∫ ( R ⃗ G P i F ⋅ α ⃗ M F ) R ⃗ G P i F d m i ) − ∫ ( R ⃗ G P i F ⋅ ω ⃗ M F ) ( ω ⃗ M F × R ⃗ G P i F ) d m i = { R ⃗ G F × m t o t a l ⋅ a ⃗ G F + ( ∫ ( R ⃗ G P i F T R ⃗ G P i F ) ⋅ E 3 × 3 α ⃗ M F d m i − ∫ ( R ⃗ G P i F T α ⃗ M F ) R ⃗ G P i F d m i ) − ∫ ( R ⃗ G P i F T ω ⃗ M F ) ( ω ⃗ M F × R ⃗ G P i F ) d m i = { R ⃗ G F × m t o t a l ⋅ a ⃗ G F + α ⃗ M F ∫ ( R ⃗ G P i F T R ⃗ G P i F ⋅ E 3 × 3 − R ⃗ G P i F R ⃗ G P i F T ) d m i − ω ⃗ M F × ( ∫ ( R ⃗ G P i F R ⃗ G P i F T ) d m i ⋅ ω ⃗ M F ) \begin{split} \frac{\mathrm{d}\vec{H}_{\Sigma _{\mathrm{M}}}^{F}}{\mathrm{d}t}&=\begin{cases} \vec{R}_{\mathrm{G}}^{F}\times m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F}+2\int{\left( \vec{V}_{\mathrm{P}_{\mathrm{i}}}^{F}\cdot \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right) \vec{\omega}_{\mathrm{M}}^{F}}\mathrm{d}m_{\mathrm{i}}+\int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right) \vec{\alpha}_{\mathrm{M}}^{F}}\mathrm{d}m_{\mathrm{i}}\\ -\int{\left( \vec{V}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}\mathrm{d}m_{\mathrm{i}}-\int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot \vec{\alpha}_{\mathrm{M}}^{F} \right) \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}\mathrm{d}m_{\mathrm{i}}-\int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) \vec{V}_{\mathrm{GP}_{\mathrm{i}}}^{F}}\mathrm{d}m_{\mathrm{i}}\\ \end{cases} \\ &=\begin{cases} \vec{R}_{\mathrm{G}}^{F}\times m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F}+\left( \int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right) \vec{\alpha}_{\mathrm{M}}^{F}}\mathrm{d}m_{\mathrm{i}}-\int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot \vec{\alpha}_{\mathrm{M}}^{F} \right) \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}\mathrm{d}m_{\mathrm{i}} \right)\\ -\int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) \left( \vec{\omega}_{\mathrm{M}}^{F}\times \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right) \mathrm{d}m_{\mathrm{i}}}\\ \end{cases} \\ &=\begin{cases} \vec{R}_{\mathrm{G}}^{F}\times m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F}+\left( \int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right) \cdot E^{3\times 3}\vec{\alpha}_{\mathrm{M}}^{F}}\mathrm{d}m_{\mathrm{i}}-\int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{\alpha}_{\mathrm{M}}^{F} \right) \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}\mathrm{d}m_{\mathrm{i}} \right)\\ -\int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{\omega}_{\mathrm{M}}^{F} \right) \left( \vec{\omega}_{\mathrm{M}}^{F}\times \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right) \mathrm{d}m_{\mathrm{i}}}\\ \end{cases} \\ &=\begin{cases} \vec{R}_{\mathrm{G}}^{F}\times m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F}+\vec{\alpha}_{\mathrm{M}}^{F}\int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot E^{3\times 3}-\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}} \right)}\mathrm{d}m_{\mathrm{i}}\\ -\vec{\omega}_{\mathrm{M}}^{F}\times \left( \int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}} \right)}\mathrm{d}m_{\mathrm{i}}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right)\\ \end{cases} \end{split} dtdHΣMF=⎩ ⎨ ⎧RGF×mtotal⋅aGF+2∫(VPiF⋅RGPiF)ωMFdmi+∫(RGPiF⋅RGPiF)αMFdmi−∫(VGPiF⋅ωMF)RGPiFdmi−∫(RGPiF⋅αMF)RGPiFdmi−∫(RGPiF⋅ωMF)VGPiFdmi=⎩ ⎨ ⎧RGF×mtotal⋅aGF+(∫(RGPiF⋅RGPiF)αMFdmi−∫(RGPiF⋅αMF)RGPiFdmi)−∫(RGPiF⋅ωMF)(ωMF×RGPiF)dmi=⎩ ⎨ ⎧RGF×mtotal⋅aGF+(∫(RGPiFTRGPiF)⋅E3×3αMFdmi−∫(RGPiFTαMF)RGPiFdmi)−∫(RGPiFTωMF)(ωMF×RGPiF)dmi=⎩ ⎨ ⎧RGF×mtotal⋅aGF+αMF∫(RGPiFTRGPiF⋅E3×3−RGPiFRGPiFT)dmi−ωMF×(∫(RGPiFRGPiFT)dmi⋅ωMF)
其中:
⇒ − ω ⃗ M F × ∫ ( R ⃗ G P i F R ⃗ G P i F T ) d m i ⋅ ω ⃗ M F = ω ⃗ M F × ( ∫ ( R ⃗ G P i F T R ⃗ G P i F ⋅ E 3 × 3 − R ⃗ G P i F R ⃗ G P i F T − R ⃗ G P i F T R ⃗ G P i F ⋅ E 3 × 3 ) d m i ⋅ ω ⃗ M F ) = ω ⃗ M F × ( ∫ ( R ⃗ G P i F T R ⃗ G P i F ⋅ E 3 × 3 − R ⃗ G P i F R ⃗ G P i F T ) d m i ⋅ ω ⃗ M F ) − ω ⃗ M F × ( ∫ ( R ⃗ G P i F T R ⃗ G P i F ⋅ E 3 × 3 ) d m i ⋅ ω ⃗ M F ) ⏟ 0 \begin{split} \Rightarrow &-\vec{\omega}_{\mathrm{M}}^{F}\times \int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}} \right)}\mathrm{d}m_{\mathrm{i}}\cdot \vec{\omega}_{\mathrm{M}}^{F} \\ &=\vec{\omega}_{\mathrm{M}}^{F}\times \left( \int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot E^{3\times 3}-\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}-{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot E^{3\times 3} \right)}\mathrm{d}m_{\mathrm{i}}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) \\ &=\vec{\omega}_{\mathrm{M}}^{F}\times \left( \int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot E^{3\times 3}-\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}} \right)}\mathrm{d}m_{\mathrm{i}}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) -\begin{array}{c} \underbrace{\vec{\omega}_{\mathrm{M}}^{F}\times \left( \int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot E^{3\times 3} \right)}\mathrm{d}m_{\mathrm{i}}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) }\\ 0\\ \end{array} \end{split} ⇒−ωMF×∫(RGPiFRGPiFT)dmi⋅ωMF=ωMF×(∫(RGPiFTRGPiF⋅E3×3−RGPiFRGPiFT−RGPiFTRGPiF⋅E3×3)dmi⋅ωMF)=ωMF×(∫(RGPiFTRGPiF⋅E3×3−RGPiFRGPiFT)dmi⋅ωMF)− ωMF×(∫(RGPiFTRGPiF⋅E3×3)dmi⋅ωMF)0
将上两式进行汇总,可得:
⇒ d H ⃗ Σ M F d t = { R ⃗ G F × m t o t a l ⋅ a ⃗ G F + ∫ ( R ⃗ G P i F T R ⃗ G P i F ⋅ E 3 × 3 − R ⃗ G P i F R ⃗ G P i F T ) d m i α ⃗ M F + ω ⃗ M F × ( ∫ ( R ⃗ G P i F T R ⃗ G P i F ⋅ E 3 × 3 − R ⃗ G P i F R ⃗ G P i F T ) d m i ⋅ ω ⃗ M F ) = R ⃗ G F × m t o t a l ⋅ a ⃗ G F + [ I ] Σ M / G F α ⃗ M F + ω ⃗ M F × ( [ I ] Σ M / G F ⋅ ω ⃗ M F ) \begin{split} \Rightarrow \frac{\mathrm{d}\vec{H}_{\Sigma _{\mathrm{M}}}^{F}}{\mathrm{d}t}&=\begin{cases} \vec{R}_{\mathrm{G}}^{F}\times m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F}+\int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot E^{3\times 3}-\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}} \right)}\mathrm{d}m_{\mathrm{i}}\vec{\alpha}_{\mathrm{M}}^{F}\\ +\vec{\omega}_{\mathrm{M}}^{F}\times \left( \int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot E^{3\times 3}-\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}} \right)}\mathrm{d}m_{\mathrm{i}}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right)\\ \end{cases} \\ &=\vec{R}_{\mathrm{G}}^{F}\times m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F}+\left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}\vec{\alpha}_{\mathrm{M}}^{F}+\vec{\omega}_{\mathrm{M}}^{F}\times \left( \left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) \end{split} ⇒dtdHΣMF=⎩ ⎨ ⎧RGF×mtotal⋅aGF+∫(RGPiFTRGPiF⋅E3×3−RGPiFRGPiFT)dmiαMF+ωMF×(∫(RGPiFTRGPiF⋅E3×3−RGPiFRGPiFT)dmi⋅ωMF)=RGF×mtotal⋅aGF+[I]ΣM/GFαMF+ωMF×([I]ΣM/GF⋅ωMF)
其中:
[ I ] Σ M / G F = ∫ ( R ⃗ G P i F T R ⃗ G P i F ⋅ E 3 × 3 − R ⃗ G P i F R ⃗ G P i F T ) d m i \left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}=\int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot E^{3\times 3}-\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}} \right)}\mathrm{d}m_i [I]ΣM/GF=∫(RGPiFTRGPiF⋅E3×3−RGPiFRGPiFT)dmi
[ I ] Σ M / G F \left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F} [I]ΣM/GF被称为惯性矩阵inertia matrix(或称为惯量矩阵),为该物体在固定坐标系下相对于质心点 G G G的惯性张量。
进而可知:
d H ⃗ Σ M F d t = M ⃗ Σ M F = ∫ R ⃗ P i F × d F ⃗ P i F = R ⃗ G F × m t o t a l ⋅ a ⃗ G F + [ I ] Σ M / G F α ⃗ M F + ω ⃗ M F × ( [ I ] Σ M / G F ⋅ ω ⃗ M F ) \frac{\mathrm{d}\vec{H}_{\Sigma _{\mathrm{M}}}^{F}}{\mathrm{d}t}=\vec{M}_{\Sigma _{\mathrm{M}}}^{F}=\int{\vec{R}_{\mathrm{P}_{\mathrm{i}}}^{F}\times \mathrm{d}\vec{F}_{\mathrm{P}_{\mathrm{i}}}^{F}}=\vec{R}_{\mathrm{G}}^{F}\times m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F}+\left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}\vec{\alpha}_{\mathrm{M}}^{F}+\vec{\omega}_{\mathrm{M}}^{F}\times \left( \left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) dtdHΣMF=MΣMF=∫RPiF×dFPiF=RGF×mtotal⋅aGF+[I]ΣM/GFαMF+ωMF×([I]ΣM/GF⋅ωMF)
上式被称为:欧拉方程在惯性坐标系下相对固定点的表达式;当固定点与质心点重合时(此时G点为固定点),则有:
M ⃗ Σ M / G F = M ⃗ Σ M F − R ⃗ G F × ( m t o t a l ⋅ a ⃗ G F ) = R ⃗ G F × ( m t o t a l ⋅ a ⃗ G F ) + [ I ] Σ M / G F α ⃗ M F + ω ⃗ M F × ( [ I ] Σ M / G F ⋅ ω ⃗ M F ) − R ⃗ G F × ( m t o t a l ⋅ a ⃗ G F ) = [ I ] Σ M / G F α ⃗ M F + ω ⃗ M F × ( [ I ] Σ M / G F ⋅ ω ⃗ M F ) \begin{split} \vec{M}_{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}&=\vec{M}_{\Sigma _{\mathrm{M}}}^{F}-\vec{R}_{\mathrm{G}}^{F}\times \left( m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F} \right) \\ &=\vec{R}_{\mathrm{G}}^{F}\times \left( m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F} \right) +\left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}\vec{\alpha}_{\mathrm{M}}^{F}+\vec{\omega}_{\mathrm{M}}^{F}\times \left( \left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) -\vec{R}_{\mathrm{G}}^{F}\times \left( m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F} \right) \\ &=\left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}\vec{\alpha}_{\mathrm{M}}^{F}+\vec{\omega}_{\mathrm{M}}^{F}\times \left( \left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) \end{split} MΣM/GF=MΣMF−RGF×(mtotal⋅aGF)=RGF×(mtotal⋅aGF)+[I]ΣM/GFαMF+ωMF×([I]ΣM/GF⋅ωMF)−RGF×(mtotal⋅aGF)=[I]ΣM/GFαMF+ωMF×([I]ΣM/GF⋅ωMF)
此时为固定坐标系下相对固定点质心 G G G求解的欧拉方程。
相关文章:
 质量刚体的在坐标系下运动)
[足式机器人]Part3 机构运动学与动力学分析与建模 Ch00-2(2) 质量刚体的在坐标系下运动
本文仅供学习使用,总结很多本现有讲述运动学或动力学书籍后的总结,从矢量的角度进行分析,方法比较传统,但更易理解,并且现有的看似抽象方法,两者本质上并无不同。 2024年底本人学位论文发表后方可摘抄 若有…...
【亚马逊云科技】自家的AI助手 - Amazon Q
写在前面:博主是一只经过实战开发历练后投身培训事业的“小山猪”,昵称取自动画片《狮子王》中的“彭彭”,总是以乐观、积极的心态对待周边的事物。本人的技术路线从Java全栈工程师一路奔向大数据开发、数据挖掘领域,如今终有小成…...
网络安全—SSL安全访问应用
文章目录 网络拓扑部署CA服务器颁发证书开启Web服务安装IIS服务修改Web默认网页 申请Web证书前提准备申请文件生成申请web证书开始安装web证书 客户机访问web默认网站使用HTTP使用HTTPS 为客户机安装浏览器证书 环境:Windows Server 2003 网络拓扑 这里使用NAT还是…...

Qt5.14.2实现将html文件转换为pdf文件
文章目录 简介源码widget.cppwidget.uihtml文件演示效果简介 QPdfWriter是Qt框架中用于创建和写入PDF文件的类。它允许您在您的Qt应用程序中动态生成并输出PDF文档,以便进行打印、保存或导出。 QPdfWriter类提供了以下一些常用的函数和方法,可以让您创建和定制PDF文件: 构…...
Minecraft教程:使用MCSM面板搭建我的世界私服并实现远程联机
文章目录 前言1. 安装JAVA2. MCSManager安装3.局域网访问MCSM4.创建我的世界服务器5.局域网联机测试6.安装cpolar内网穿透7. 配置公网访问地址8.远程联机测试9. 配置固定远程联机端口地址9.1 保留一个固定tcp地址9.2 配置固定公网TCP地址9.3 使用固定公网地址远程联机 前言 Li…...
springboot学生成绩管理系统源码和论文
随着信息技术和网络技术的飞速发展,人类已进入全新信息化时代,传统管理技术已无法高效,便捷地管理信息。为了迎合时代需求,优化管理效率,各种各样的管理系统应运而生,各行各业相继进入信息管理时代…...

w20webshell之文件上传
1.什么是文件上传? 将本地文件传输到指定位置。2.什么是webshell 给恶意脚本提供运行环境3.文件上传所需要的条件 a.文件成功上传,未被删除 b.知道文件路径 c.文件所在系统支持脚本运行4.文件上传流程 支持任意文件上传的文件上传 a.恶意文件上传成功 b.…...

【Redis】非关系型数据库之Redis的主从复制、哨兵和集群高可用
目录 一、主从复制、哨兵、集群的区别 二、主从复制 2.1主从复制的作用 2.2主从复制的原理 2.3主从复制的实操 步骤一:环境准备 步骤二:安装Redis以及配置文件修改 Redis的主从配置文件都一样 步骤四:验证主从复制 三、哨兵 3.1哨兵…...
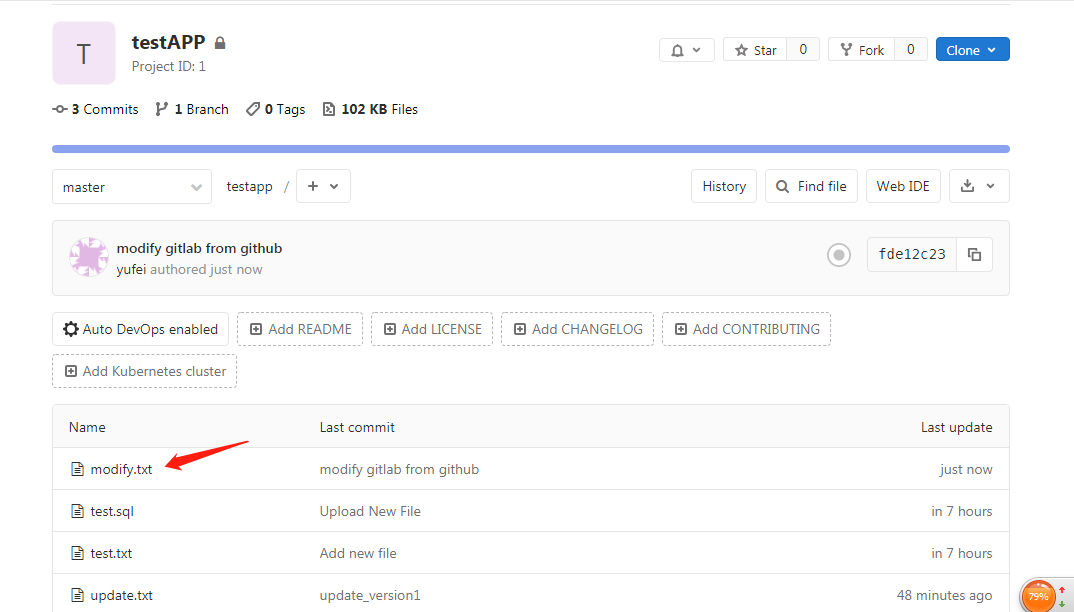
从私有Git仓库的搭建到命令的使用及部署再到分支管理
一、版本控制系统/版本控制器 1. 版本控制系统: git 分布式 —没有中心代码库,所有机器之间的地位同等(每台机器上都有相同的代码) svn 集中管理的 —有中心代码库,其他都是客户端 2.git与svn介绍 1.git属于分布…...
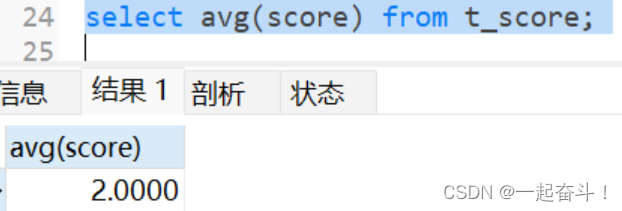
mysql基础-常用函数汇总
目录 1. 查询技巧 2. 时间函数 2.1 now() 2.2 current_date() 2.3 时间差timestampdiff()与datediff() 2.4 其他时间函数 3. 字符函数 3.1 截取函数 3.2 分割函数 3.3 left与right函数 3.4 其他函数 4. 数字函数 5. …...

COCO数据格式的json文件内容
COCO(Common Objects in Context)数据集现在有3种标注类型:object instances(目标实例), object keypoints(目标上的关键点), 和image captions(看图说话),使用JSON文件存储,包含了对图像中目标的边界框、类别标签、分割掩码等信息。 COCO标注文件是一个包含多个字…...
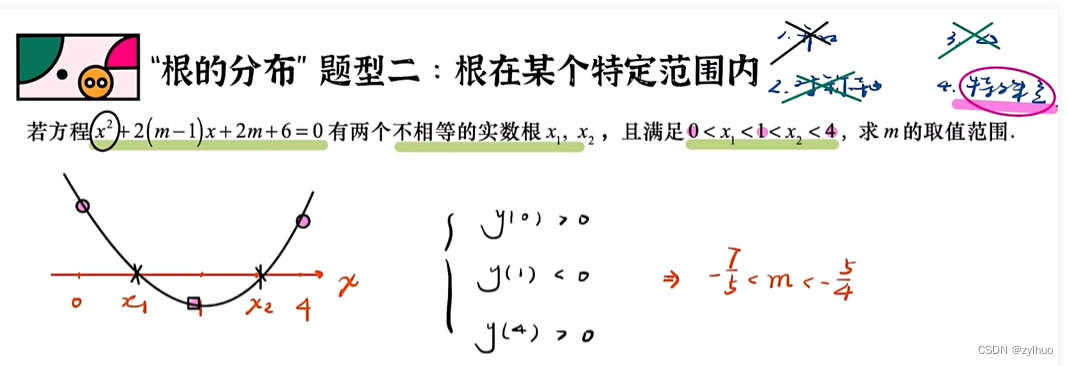
AI-数学-高中-3.二次函数的根的分布问题的解题方法
原作者学习视频:二次】3二次函数根分布问题(中档)_哔哩哔哩_bilibili 一、伟达定理(根与0比较的二次函数) 示例: 二、画图法: 1.开口方向的确定,有的示例可能存在向上、下两种情况…...

golang中gorm使用
前言 记录下go语言操作mysql数据库,选用gorm,gorm是一个流行的对象关系映射(ORM)库,用于简化与数据库的交互。 接入步骤 安装gorm:首先,你需要使用Go模块来安装gorm。在终端中运行以下命令&…...

centoss7安装mysql详细教程
【MySQL系列】在Centos7环境安装MySQL_centos7安装mysql-CSDN博客 【MySQL系列】在Centos7环境安装MySQL_centos7安装mysql-CSDN博客 【MySQL系列】在Centos7环境安装MySQL_centos7安装mysql-CSDN博客...

SpringBoot-拓展
邮件 依赖 <groupId>org.springframework.boot</groupId> <artifactId>spring-boot-starter-mail</artifactId>配置 spring.mail.username邮箱 spring.mail.password授权码 spring.mail.hostsmtp.qq.com # 开启加密验证 spring.mail.properties.mai…...
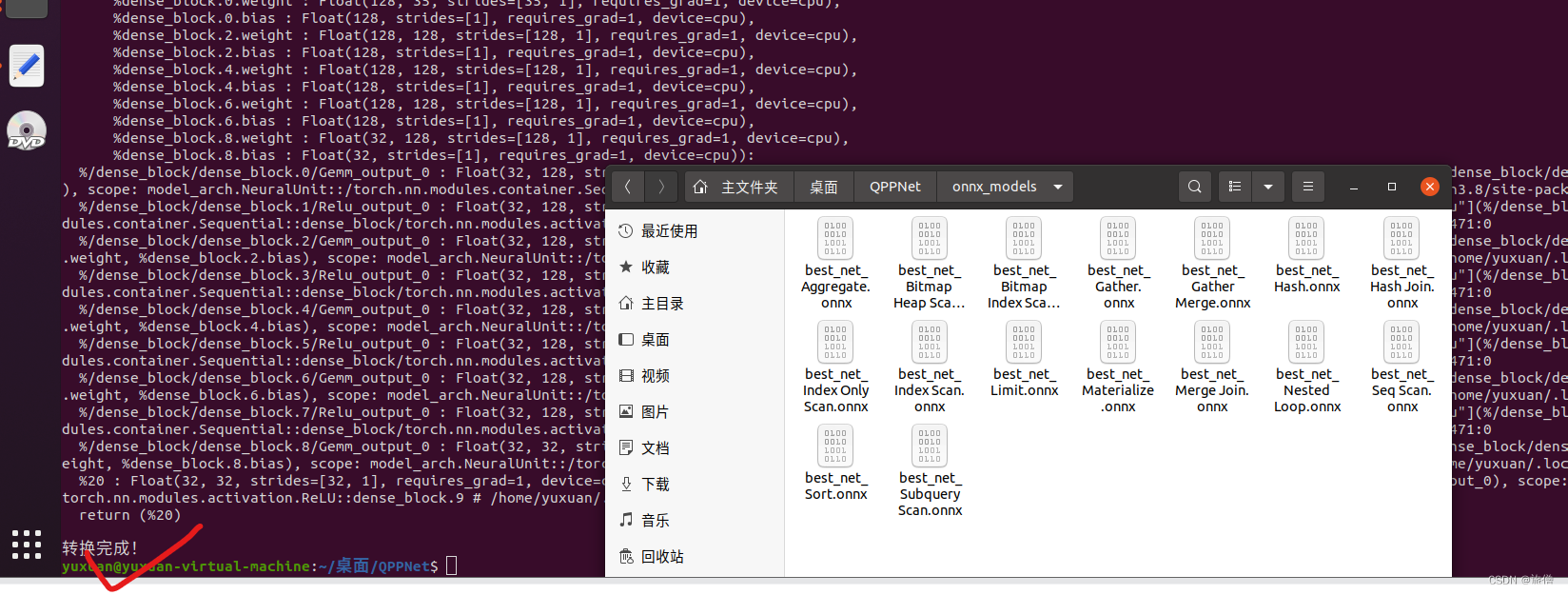
用于查询性能预测的计划结构深度神经网络模型--大数据计算基础大作业
用于查询性能预测的计划结构深度神经网络模型 论文阅读和复现 24.【X1.1】 在关系数据库查询优化领域,对查询时间的估计准确性直接决定了查询优化结果,进而影响到数据库整体的查询效率。但由于数据库自身的复杂性,查询时间受到数据分布、数据…...

MySQL5.7用于控制副本服务器的 SQL 语句
官网地址:MySQL :: MySQL 5.7 Reference Manual :: 13.4.2 SQL Statements for Controlling Replica Servers 欢迎关注留言,我是收集整理小能手,工具翻译,仅供参考,笔芯笔芯. MySQL 5.7 参考手册 / ... / CHANGE M…...

stable diffusion 人物高级提示词(四)朝向、画面范围、远近、焦距、机位、拍摄角度
一、朝向 英文中文front view正面Profile view / from side侧面half-front view半正面Back view背面(quarter front view:1.5)四分之一正面 prompt/英文中文翻译looking at the camera看向镜头facing the camera面对镜头turned towards the camera转向镜头looking away from …...
C#.Net学习笔记——设计模式六大原则
***************基础介绍*************** 1、单一职责原则 2、里氏替换原则 3、依赖倒置原则 4、接口隔离原则 5、迪米特法原则 6、开闭原则 一、单一职责原则 举例:类T负责两个不同的职责:职责P1,职责P2。当由于职责P1需求发生改变而需要修…...

go 修改postgresql的配置参数
postgresql.conf与postgresql.auto.conf的区别 postgresql.auto.conf的优先级高于postgresql.conf,如果一个参数同时存在postgresql.auto.conf和postgresql.conf里面,系统会先读postgresql.auto.conf的参数配置。 使用alter system set修改的是postgres…...
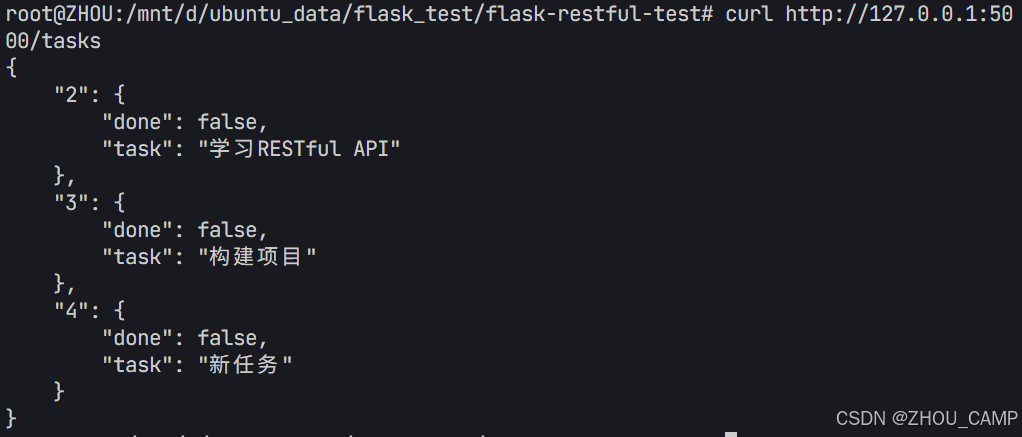
Flask RESTful 示例
目录 1. 环境准备2. 安装依赖3. 修改main.py4. 运行应用5. API使用示例获取所有任务获取单个任务创建新任务更新任务删除任务 中文乱码问题: 下面创建一个简单的Flask RESTful API示例。首先,我们需要创建环境,安装必要的依赖,然后…...
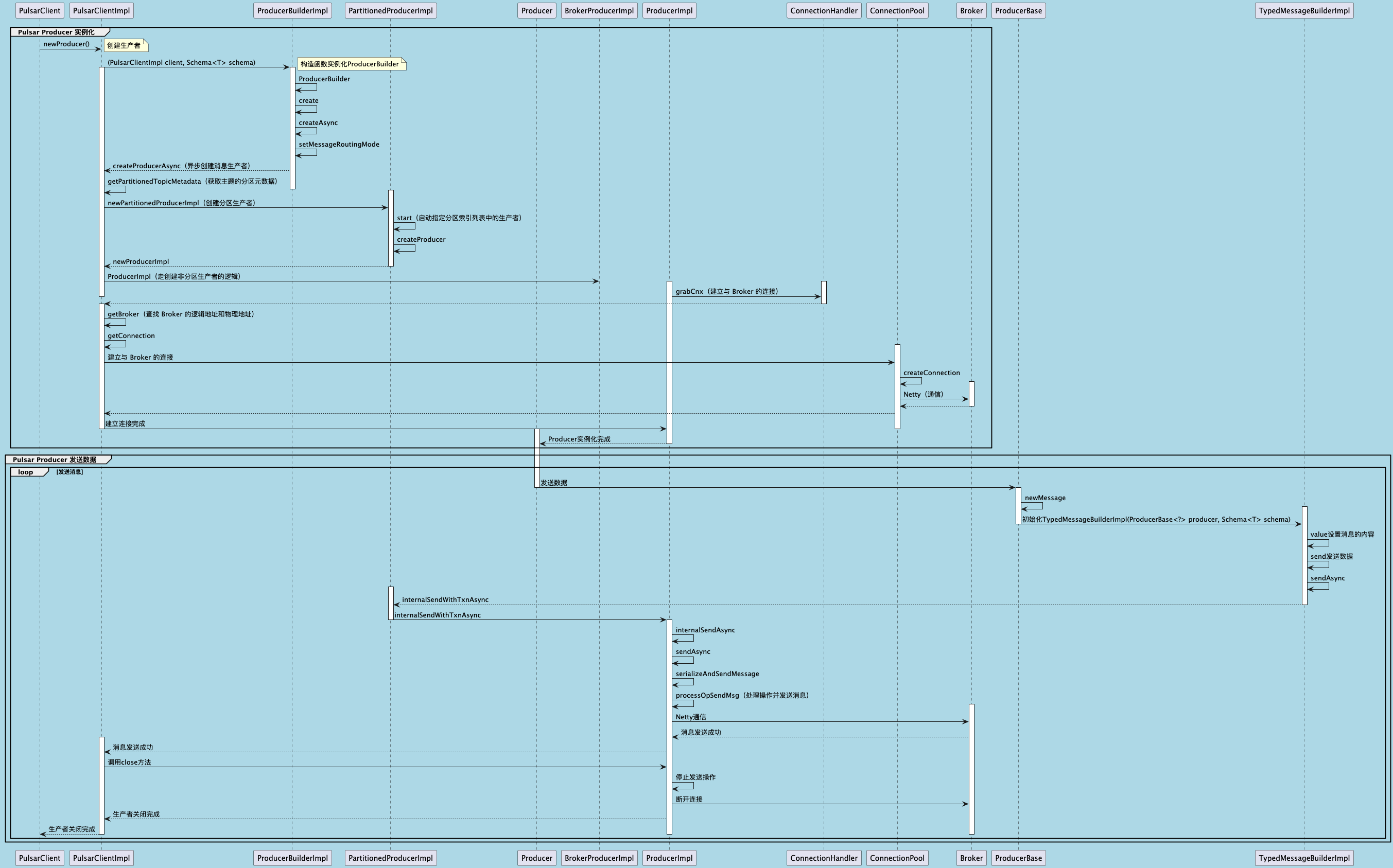
聊聊 Pulsar:Producer 源码解析
一、前言 Apache Pulsar 是一个企业级的开源分布式消息传递平台,以其高性能、可扩展性和存储计算分离架构在消息队列和流处理领域独树一帜。在 Pulsar 的核心架构中,Producer(生产者) 是连接客户端应用与消息队列的第一步。生产者…...

基于Uniapp开发HarmonyOS 5.0旅游应用技术实践
一、技术选型背景 1.跨平台优势 Uniapp采用Vue.js框架,支持"一次开发,多端部署",可同步生成HarmonyOS、iOS、Android等多平台应用。 2.鸿蒙特性融合 HarmonyOS 5.0的分布式能力与原子化服务,为旅游应用带来…...
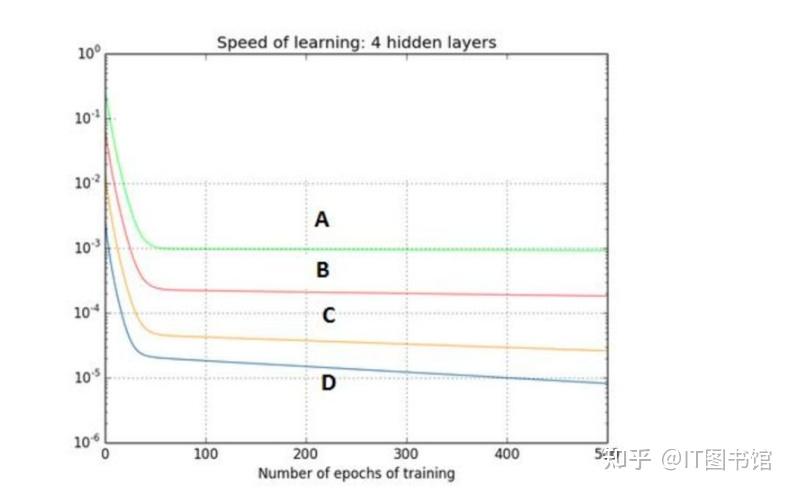
深度学习习题2
1.如果增加神经网络的宽度,精确度会增加到一个特定阈值后,便开始降低。造成这一现象的可能原因是什么? A、即使增加卷积核的数量,只有少部分的核会被用作预测 B、当卷积核数量增加时,神经网络的预测能力会降低 C、当卷…...
提供了哪些便利?)
现有的 Redis 分布式锁库(如 Redisson)提供了哪些便利?
现有的 Redis 分布式锁库(如 Redisson)相比于开发者自己基于 Redis 命令(如 SETNX, EXPIRE, DEL)手动实现分布式锁,提供了巨大的便利性和健壮性。主要体现在以下几个方面: 原子性保证 (Atomicity)ÿ…...

Bean 作用域有哪些?如何答出技术深度?
导语: Spring 面试绕不开 Bean 的作用域问题,这是面试官考察候选人对 Spring 框架理解深度的常见方式。本文将围绕“Spring 中的 Bean 作用域”展开,结合典型面试题及实战场景,帮你厘清重点,打破模板式回答,…...

WebRTC从入门到实践 - 零基础教程
WebRTC从入门到实践 - 零基础教程 目录 WebRTC简介 基础概念 工作原理 开发环境搭建 基础实践 三个实战案例 常见问题解答 1. WebRTC简介 1.1 什么是WebRTC? WebRTC(Web Real-Time Communication)是一个支持网页浏览器进行实时语音…...
【LeetCode】算法详解#6 ---除自身以外数组的乘积
1.题目介绍 给定一个整数数组 nums,返回 数组 answer ,其中 answer[i] 等于 nums 中除 nums[i] 之外其余各元素的乘积 。 题目数据 保证 数组 nums之中任意元素的全部前缀元素和后缀的乘积都在 32 位 整数范围内。 请 不要使用除法,且在 O…...
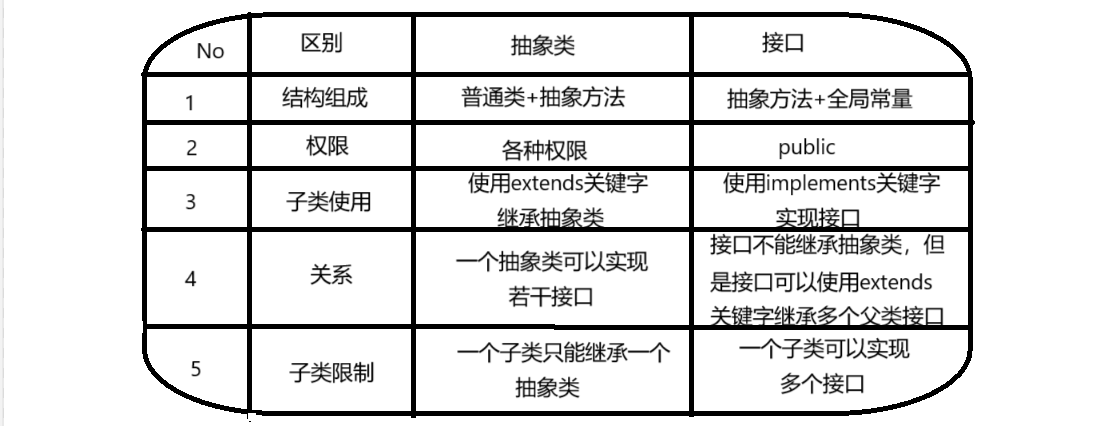
抽象类和接口(全)
一、抽象类 1.概念:如果⼀个类中没有包含⾜够的信息来描绘⼀个具体的对象,这样的类就是抽象类。 像是没有实际⼯作的⽅法,我们可以把它设计成⼀个抽象⽅法,包含抽象⽅法的类我们称为抽象类。 2.语法 在Java中,⼀个类如果被 abs…...
【C++】纯虚函数类外可以写实现吗?
1. 答案 先说答案,可以。 2.代码测试 .h头文件 #include <iostream> #include <string>// 抽象基类 class AbstractBase { public:AbstractBase() default;virtual ~AbstractBase() default; // 默认析构函数public:virtual int PureVirtualFunct…...