[论文阅读]4DRadarSLAM: A 4D Imaging Radar SLAM System for Large-scale Environments
目录
1.摘要和引言:
2. 系统框架:
2.1 前端:
2.2 回环检测:
2.3 后端:
3.实验和分析:
4.结论
1.摘要和引言:
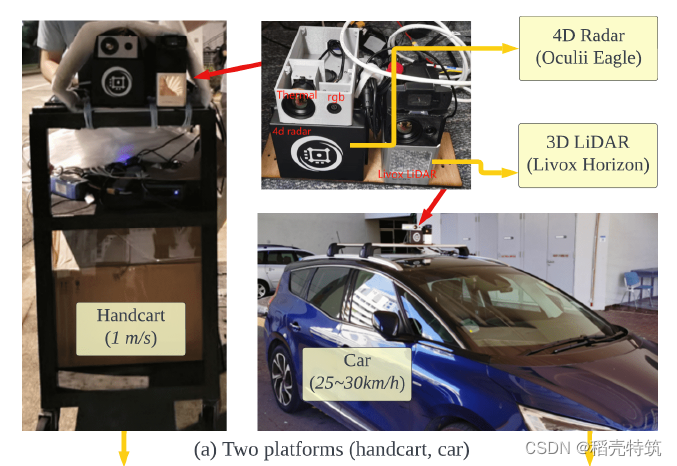
这篇论文介绍了一种名为“4DRadarSLAM”的新型4D成像雷达SLAM系统,旨在提高大规模环境下的定位与地图构建性能。与传统的基于激光雷达的SLAM系统相比,该系统在恶劣天气条件下表现更佳。它包括前端、回环检测和后端三个主要部分:前端通过扫描匹配计算里程计数据,回环检测模块识别回环,后端则构建并优化姿态图。该系统的显著特点是考虑了每个点的概率分布,从而改善性能。论文中还展示了在不同平台和数据集上的实验结果,证明了该系统的准确性、鲁棒性和实时性。此外,为了进一步促进相关研究,研究者将系统代码开源。https://github.com/zhuge2333/4DRadarSLAM
引言部分介绍了同步定位与地图构建(SLAM)的重要性,并指出在恶劣天气条件下,基于激光雷达的SLAM系统可能会受到限制。因此,近年来越来越多的关注转向了稳健的毫米波雷达测距(mmWave Radar)。然而,大多数研究集中在2D或3D雷达上,而关于4D雷达(x, y, z, 多普勒)的研究相对较少。4D雷达是一种相对较新的技术,其收集的点云比3D激光雷达更嘈杂和稀疏,这使得从4D雷达的点云中提取有效的几何特征更具挑战性。因此,直接将3D激光雷达SLAM方法应用于4D雷达SLAM并不可行。论文提出了一个针对4D成像雷达的完整SLAM系统,包括前端、回环检测和后端。
2. 系统框架:
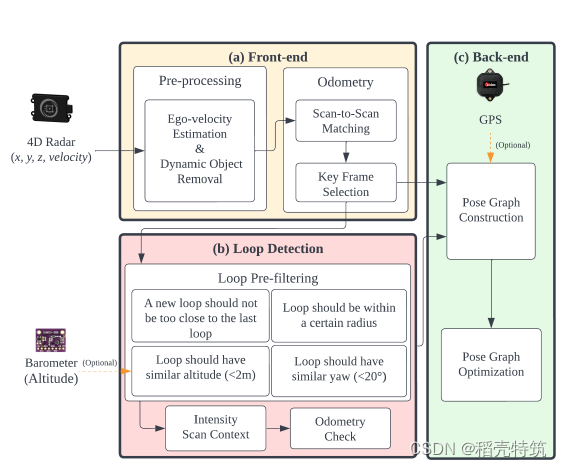
4DRadarSLAM系统分三个主要模块:前端、回环检测和后端。在前端模块中,使用4D雷达点云作为输入,估计里程计数据并生成关键帧。回环检测模块评估每个新的关键帧,以确定是否能形成回环。在后端,构建并使用g2o优化姿态图,从而生成优化后的姿态作为输出。整个系统旨在通过这些模块协同工作,提高SLAM系统在大规模环境中的性能和准确性。
2.1 前端:
预处理阶段:需要过滤掉动态物体。可以利用雷达的多普勒速度信息来识别这些物体。在这项研究中,作者使用一种在文献[33]中提出的线性最小二乘法来估计雷达的自我速度。通过估计的多普勒速度和自我速度,他们能够确定物体的真实速度。这一过程有助于提高SLAM系统对环境的理解和处理能力,尤其是在动态和复杂的场景中。
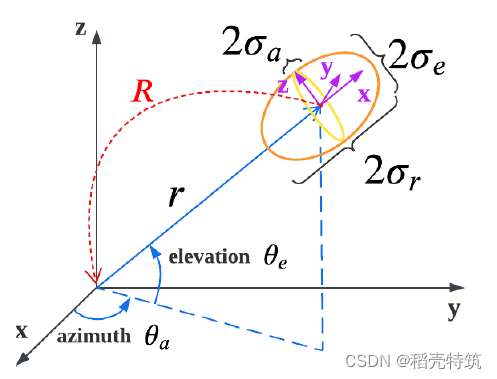
Scan-to-Scan matching: 输入是上一关键帧(Fk)和新的一帧(Pt)。目标是找到从t到k的转换矩阵(Ttk)。由于4D雷达点云的噪声较大,直接提取几何特征(如边缘和平面)并不容易。我们发现,与 ICP 和 NDT 相比,GICP 算法可以输出更可接受的结果。初始转换矩阵设置为上一次的转换矩阵(Ttk-1)。提出了一种新的算法,称为自适应概率分布-GICP(APDGICP),它在 GICP 算法中考虑了每个点的空间概率分布。根据雷达手册,点的测距不确定性为 σr = 0.00215r,其中 r 和 σr 分别是测量的距离和不确定性。方位角和仰角精度分别为 0.5° 和 1.0°,这导致了球坐标系中方位角和仰角方向的不确定性,近似为 σa ≈ sin(0.5°)r 和 σe ≈ sin(1.0°)r。由此产生的概率分布如下图所示,类似于一个椭球体(橙色),一个轴指向原点,三个半轴长度分别为 σr(距离)、σa(方位角)和 σe(仰角)。
关键帧选择:第一帧被指定为固定关键帧,而后续关键帧的确定取决于是否满足以下两个条件之一:1. 当前帧和上一关键帧之间的平移量超过阈值 δt; 2. 当前帧和上一关键帧之间的旋转量超过阈值 δr。阈值参数根据经验设置如下:δt = 0.5m 或 2m,δr = 15°。第 k 个和第 k+1 个关键帧之间的扫描到扫描匹配结果作为 SE(3) 二元边添加到位姿图中。
2.2 回环检测:
此步骤的目的是确定每个关键帧是否构成了一个回环。首先,通过预过滤步骤基于四个规则识别潜在的环路,包括距离限制、空间接近性、高度差限制和姿态角限制。接着,利用强度扫描上下文模块来进一步筛选潜在的闭环候选。最后,为确保几何一致性,采用里程计检查步骤,以防止后端姿态图优化中的几何不一致问题。通过这些步骤,系统能有效识别并确认回环,从而增强SLAM系统的精度和可靠性。
2.3 后端:
基于前端里程计、闭环检测和GPS信号(如果可用)构建姿态图。关键帧在姿态图中表示为节点,节点之间的边代表里程计约束。当确定闭环时,将其作为约束(二元边)添加。如果有GPS信号,也可以将其作为单元边加入姿态图中,其协方差直接从GPS数据获得。最后,使用g2o库优化姿态图,得出优化的姿态。
3.实验和分析:
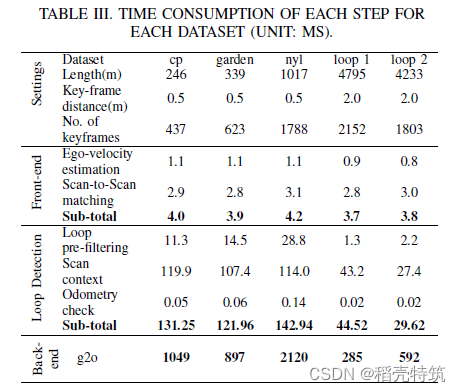
这里包括了对系统的前端和后端性能的定量分析,以及使用五个不同数据集的实验结果。实验显示,在小规模数据集上,APDGICP(自适应概率分布GICP)在前端性能上优于GICP,而在大规模数据集上GICP表现更好。准确的环路闭合显著提高了精度,尤其是在后端优化时。此外,使用GPS数据的后端优化进一步提高了系统的性能。文章还包括了对这些方法在不同数据集上轨迹的可视化比较,以及各个算法步骤的效率分析。



4.结论
在这篇论文中,为4D成像雷达引入了一个完整的SLAM系统,该系统由三个模块组成:前端、回环检测和后端。在前端,估计了雷达自身速度以去除动态物体,并提出了APDGICP算法,该算法考虑了原始GICP中每个点的概率分布,用于扫描到扫描匹配。在回环检测中,引入了几种回环过滤方法,并使用强度扫描上下文来查找回环候选。实现了一个里程计检查模块,以确定最佳回环。在后端,基于前端里程计、检测到的回环和GPS数据构建位姿图。使用自己收集的数据集进行了大量实验,这些数据集涵盖了各种环境和速度,包括结构化和非结构化、小规模和大规模环境、低速和中速。我们提出的系统在笔记本电脑上实现了实时性能,相对误差(RE)为2.05%、0.0052deg/m,绝对轨迹误差(ATE)为2.35m。未来的工作包括:融合4D雷达和IMU以实现更鲁棒的SLAM。
相关文章:
[论文阅读]4DRadarSLAM: A 4D Imaging Radar SLAM System for Large-scale Environments
目录 1.摘要和引言: 2. 系统框架: 2.1 前端: 2.2 回环检测: 2.3 后端: 3.实验和分析: 4.结论 1.摘要和引言: 这篇论文介绍了一种名为“4DRadarSLAM”的新型4D成像雷达SLAM系统࿰…...

Python: vars()详细解释
vars() 是一个内置函数,用于返回一个对象的 __dict__ 属性。它接受一个对象作为参数,如果省略参数,它返回当前局部作用域的字典。 具体而言,vars() 的行为取决于参数的类型: 1. 没有参数: 如果没有提供参…...

2024年1月15日Arxiv最热论文推荐:斯坦福LLM精准微调新框架、GPT不愿承认回答错误、速度快15倍的3D全景分割新突破
本文整理了今日发表在ArXiv上的AI论文中最热门的TOP5。 论文解读、论文热度排序、论文标签、中文标题、推荐理由和论文摘要均由赛博马良平台上的智能体 「AI论文解读达人」提供。 如需查看其他热门论文,欢迎移步赛博马良 ^_^ TOP1 APAR: LLMs Can Do Auto-Paral…...

1.5 面试经典150题 - 轮转数组
轮转数组 给定一个整数数组 nums,将数组中的元素向右轮转 k 个位置,其中 k 是非负数。 注意:本题需要原地操作 class Solution(object):def rotate(self, nums, k):""":type nums: List[int]:type k: int:rtype: None Do not…...

Linux的基础命令学习
pwd - 显示当前工作目录的路径 cd - 切换工作目录,ls - 列出当前目录的文件和子目录 rm - 删除文件或目录 mkdir - 创建新目录 rm - 删除目录 nano/vi - 编辑文本文件,按Enter键进入 之后按i键就可以进入写入模式 之后输入文字以后按Esc键与:q就不保…...

个人数据备份方案分享(源自一次悲惨经历)
文章目录 1 起源2 备份架构2.1 生活照片2.2 生活录音2.3 微信文件2.4 工作文件2.5 笔记、影视音乐、书籍 3 使用工具介绍3.1 小米云服务3.2 中国移动云盘3.3 小米移动硬盘(1T)3.4 FreeFileSync 4 总结 1 起源 本文的灵感源于我个人的一次不幸遭遇&#…...
 | SpringBoot统一结果封装)
SpringBoot教程(八) | SpringBoot统一结果封装
SpringBoot教程(八) | SpringBoot统一结果封装 经过了前面几篇文章,SpringBoot中MVC相关的配置其实都已经差不多了,接下来就可以完全进入接口开发阶段了。前面我们写过几个接口,虽然都加了RestController注解,相当于统一了我们的…...
Ubuntu 22.04 安装Fail2Ban
Fail2Ban是一种用来防止暴力破解的工具,一般要和iptables配合使用。其原理是读取系统日志,并通过正则表达式匹配,监控IP在一段时间内的登录尝试、身份验证失败日志等并进行计数。超过阈值则进行IP封禁,过一段时间后再解封。 总的…...

Ubuntu 22.04 编译安装 Qt mysql驱动
参考自 Ubuntu20.04.3 QT5.15.2 MySQL驱动编译 Ubuntu 18.04 编译安装 Qt mysql驱动 下边这篇博客不是主要参考的, 但是似乎解决了我的难题(找不到 libmysqlclient.so) ubuntu18.04.2 LTS 系统关于Qt5.12.3 无法加载mysql驱动,需要重新编译MYSQL数据库驱动的问题以…...
Mindspore 公开课 - CodeGeeX
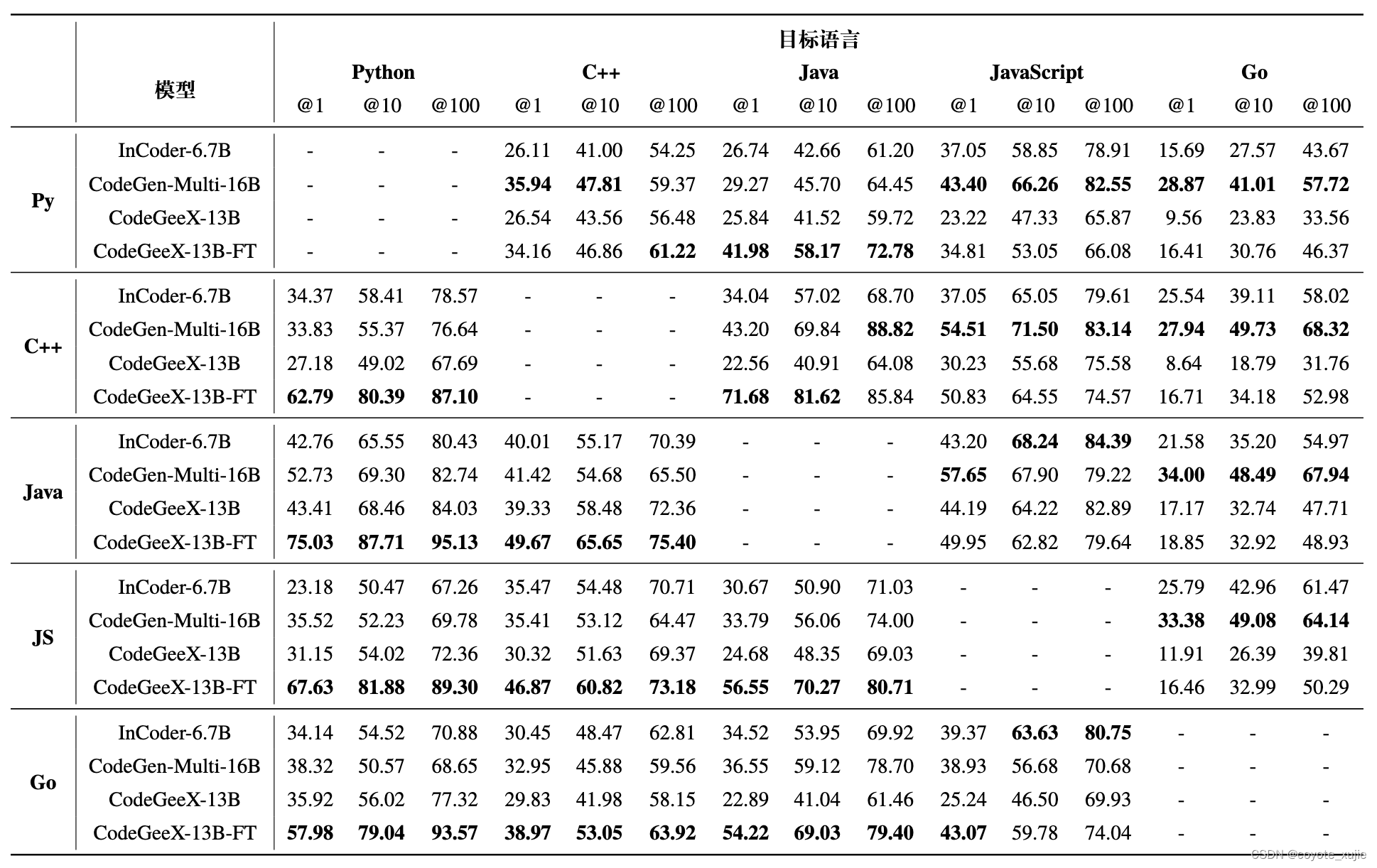
CodeGeeX: 多语言代码生成模型 CodeGeeX 是一个具有130亿参数的多编程语言代码生成预训练模型。CodeGeeX采用华为MindSpore框架实现,在鹏城实验室“鹏城云脑II”中的192个节点(共1536个国产昇腾910 AI处理器)上训练而成。截至2022年6月22日&…...

说一下mysql的锁
1、全局锁: 影响整个数据库的锁。例如,当执行 FLUSH TABLES WITH READ LOCK; 命令时,会阻止其他用户写入数据库,但可以读取。全局锁简介 全局锁是一种跨所有数据库实例的锁。它可以确保在任何时刻,只有一个事务能够访问共享资源。全局锁通常用于以下场景: 并发性较高的场…...
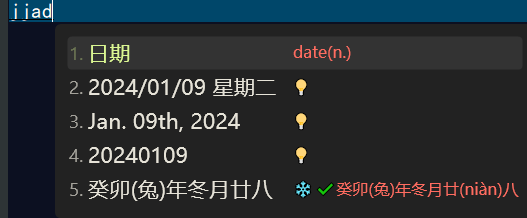
rime中州韵小狼毫 日期/农历 时间 事件 节气 滤镜
教程目录:rime中州韵小狼毫须鼠管安装配置教程 保姆级教程 100增强功能配置教程 网络上但凡提到 rime中州韵小狼毫须鼠管输入法,总少不了智能时间,日期等炫技,可见这个便捷时间/日期输入功能是多么的受欢迎。作者也不落窠臼&…...
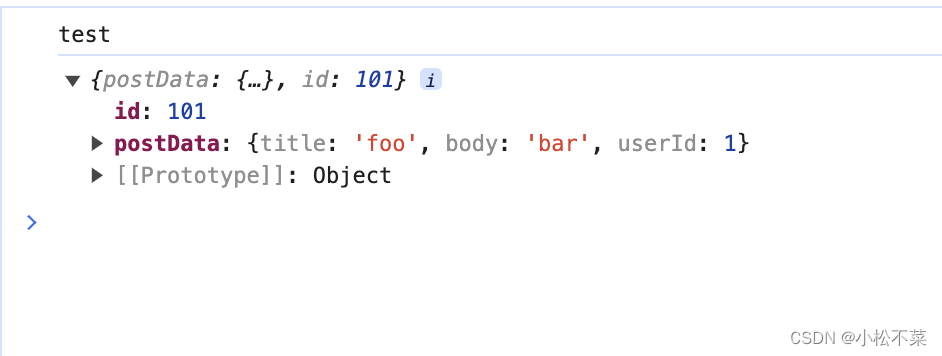
【前端】前后端的网络通信基础操作(原生ajax, axios, fetch)
概述 前后端网络请求工具 原生ajaxfetch apiaxios GET和POST请求 get只能发纯文本 post可以发不同类型的数据,要设置请求头,需要告诉服务器一些额外信息 测试服务器地址 有一些公共的测试 API 可供学习和测试用途。这些 API 允许你发送 HTTP 请求…...
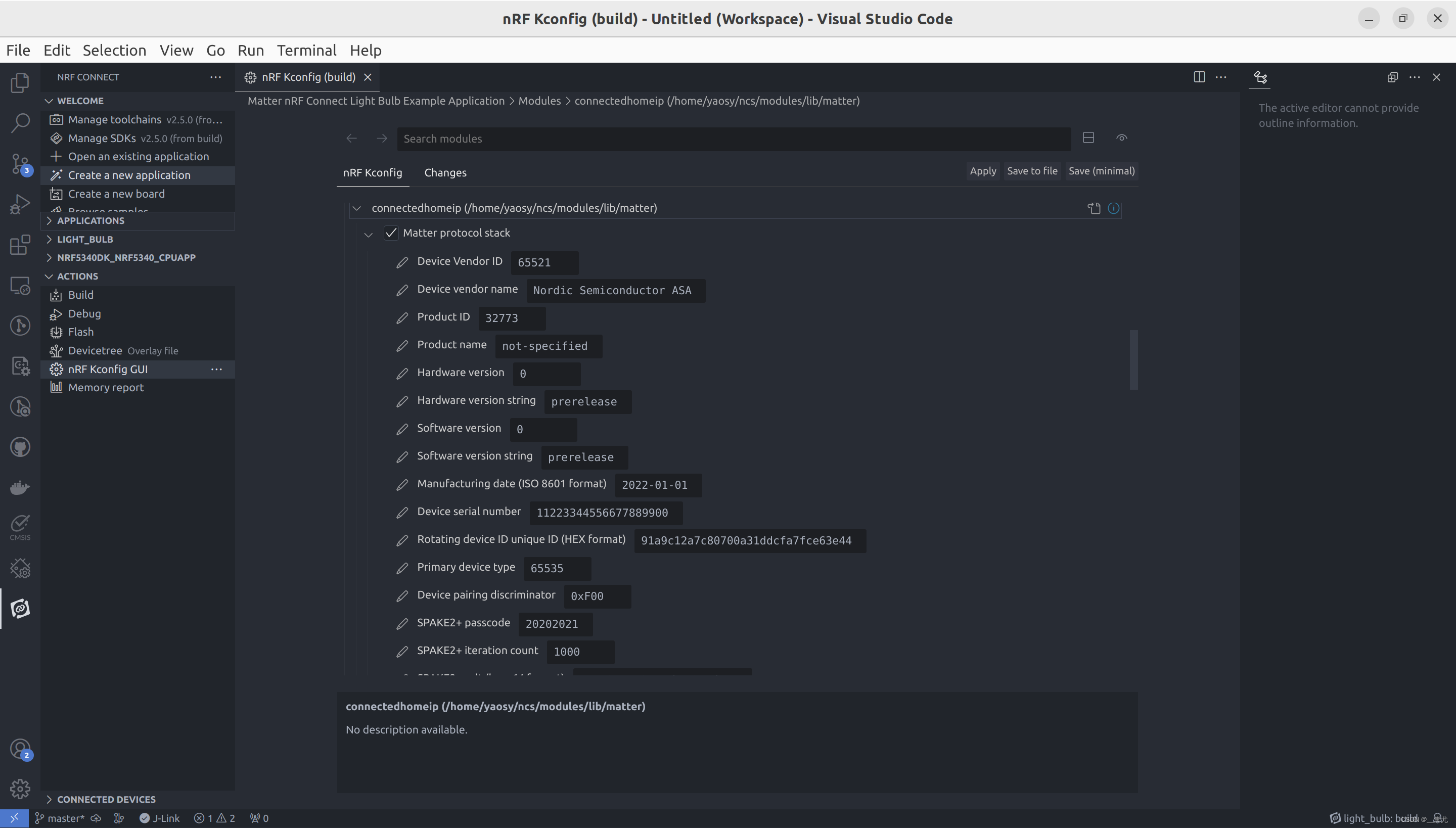
Matter - 配置工厂数据(2)
部分关键名词参数简介 PASE(Passcode-Authenticated Session Establishment): 基于密码认证的会话建立,用于在 Commissioning 的时候 Commissioner 与 Matter Deivce 之间建立安全信道,生成对称加密密钥用于 Commissioning 后续通信消息进行加、解密和完…...
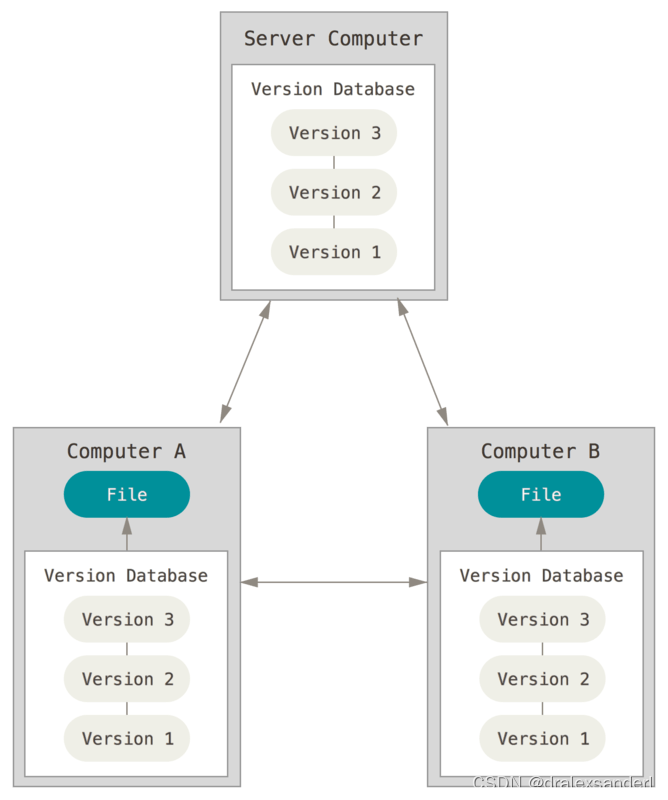
版本控制背景知识
版本控制背景知识 本文是关于 Git 系列文章的导读,我们先介绍一下版本控制的背景知识。 什么是版本控制 版本控制是一种记录一个或若干文件内容变化,以便将来查阅特定版本修订情况的系统。它将什么时候、什么人更改了文件的什么内容等信息如实记录下来…...

tensorflow报错: DNN library is no found
错误描述 如上图在执行程序的时候,会出现 DNN library is no found 的报错 解决办法 这个错误基本上说明你安装的 cudnn有问题,或者没有安装这个工具。 首先检测一下你是否安装了 cudnn 进入CUDA_HOME下,也就是进入你的cuda的驱动的安装目…...

DA14531-高级应用篇-用户如何开启OTA服务
文章目录 1. OTA相关文件2.OTA宏定义列表3.OTA主要函数接口4.OTA具体实施步骤5.总结1. OTA相关文件 1)app_suotar_task.c和app_suotar_task.h 2)app_suotar.c和app_suotar.h 2.OTA宏定义列表 宏定义注解CFG_PRF_SUOTAR用户开启SOTA功能BLE_SUOTA_RECEIVERSOTA功能服务CFG_S…...

国内镜像源配置方法(包括临时和永久方法)
国内镜像源: 阿里云 http://mirrors.aliyun.com/pypi/simple/中国科技大学 https://pypi.mirrors.ustc.edu.cn/simple/豆瓣 http://pypi.douban.com/simplePython官方 https://pypi.python.org/simple/v2ex http://pypi.v2ex.com/simple/中国科学院 http://pypi.mi…...
)
数据结构二叉树--堆(数据结构实现和堆排序的一种实现)
堆是一个数据结构 逻辑结构:完全二叉树(要求父节点大于孩子节点或者小于孩子节点) 存储结构:顺序存储 typedef int DataType; typedef struct Heap{DataType*data;int size;int capacity; }Heap;void InitHeap(Heap*pH) {asser…...

【Linux】 nohup命令使用
nohup命令 nohup是Linux和Unix系统中的一个命令,其作用是在终端退出时,让进程在后台继续运行。它的全称为“no hang up”,意为“不挂起”。nohup命令可以让你在退出终端或关闭SSH连接后继续运行命令。 nohup 命令,在默认情况下&…...

别急着重装系统!记一次 Ubuntu 22.04 上 gcc 与 cpp 版本依赖冲突的排查与修复实录
从依赖地狱到编译自由:Ubuntu 22.04下gcc与cpp版本冲突的深度修复指南那天下午,当我正准备为新的C项目搭建开发环境时,终端里那行刺眼的红色错误提示让我的咖啡瞬间不香了。作为一个自诩"Linux老司机"的开发者,我没想到…...

Java的背景知识及快速入门
Java的背景知识1.Java的历史知识Java是哪家公司的产品?Java是美国Sun(Stanford University Network,斯坦福大学网络公司)公司在1995年推出的一 门计算机高级编程语言。但是在2009年是Sun公司被Oracle(甲骨文࿰…...

2026.5.24-要闻
宁波大学附属康宁医院李广学副主任医师指出,每天刷手机超5小时会显著增加肥胖风险(儿童群体风险增幅达74%),并导致前额叶等脑区代谢减弱,引发注意力、记忆力下降。1 8小时前...
优化CNN-BiGUR-Attention风电功率预测研究附Matlab代码)
基于减法优化算法(SABO)优化CNN-BiGUR-Attention风电功率预测研究附Matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、程序设计科研仿真。🍎完整代码获取 定制创新 论文复现点击:Matlab科研工作室👇 关注我领取海量matlab电子书和数学建模资料 dz…...
基MSM型日盲紫外光电探测器仿真研究)
基于Silvaco的β-氧化镓(β-Ga₂O₃)基MSM型日盲紫外光电探测器仿真研究
基于Silvaco的β-氧化镓(β-Ga₂O₃)基MSM型日盲紫外光电探测器仿真研究 摘要 日盲紫外光电探测技术在导弹预警、火灾监测、紫外通信等军用和民用领域具有重要的应用价值。β-氧化镓(β-Ga₂O₃)作为一种超宽禁带半导体材料,因其禁带宽度约为4.8-4.9 eV(对应吸收截止边约25…...

恒玄bes2600WM+DSP蓝牙耳机项目
bes2600WMDSP蓝牙耳机项目...

校准机器学习与SHAP分析:构建可信专利价值评估模型
1. 项目概述:从“黑盒”预测到“透明”评估的跨越在技术管理和投资决策领域,判断一项专利或技术的长期价值,一直是个既关键又棘手的难题。传统的专家评估方法虽然能结合行业洞见,但往往耗时费力、主观性强,且难以应对海…...

鼎讯Smart-E3:为交通大动脉的通信“血管”提供专业测试方案
在铁路、高速公路等交通基础设施中,光纤网络如同神经系统,承载着指挥调度、安全监控等关键数据。一旦出现故障,如何快速、精准地定位问题,是保障交通大动脉畅通的核心。鼎讯Smart-E3光时域反射仪,作为一款集多种功能于…...
:仅开放前500份)
ChatGPT新闻稿写作终极模板包(含敏感词实时拦截表+信源可信度打分卡+记者视角反问清单):仅开放前500份
更多请点击: https://kaifayun.com 第一章:ChatGPT新闻稿写作终极模板包概览 本模板包专为公关、市场与内容团队设计,整合了新闻稿结构化框架、语义优化提示词库、合规性检查清单及多平台适配输出模块,支持从初稿生成到终稿发布…...

5分钟实现Windows三指拖拽:macOS手势体验的终极解决方案
5分钟实现Windows三指拖拽:macOS手势体验的终极解决方案 【免费下载链接】ThreeFingersDragOnWindows Enables macOS-style three-finger dragging functionality on Windows Precision touchpads. 项目地址: https://gitcode.com/gh_mirrors/th/ThreeFingersDrag…...