AD9361多片同步设计方法
本文基于ZC706+FMCOMMS5的平台,介绍了多片AD9361同步的方法。并将该设计移植到自行设计的ZYNQ7035+4片AD9361(实现8路同步收发)的电路板上。本设计采用纯逻辑的方式,仅使用了ZYNQ芯片的PL部分。
9361多芯片同步主要包括基带同步和射频同步两大块任务。其中基带采用AD9361自带的MCS功能实现。而射频同步分为两种方法,分别是内部本振法和外部本振法。
在正式介绍同步之前,先做一点准备工作,主要包括SPI驱动、AD9361初始化,外部本振芯片ADF5355的控制等。因为FMCOMMS5上两片9361以及ADF5355共用了SPI_CLK、SPI_DO、SPI_DI信号,所以还涉及到总线如何仲裁的问题。
SPI驱动
下面是FMCOMM5驱动的端口:
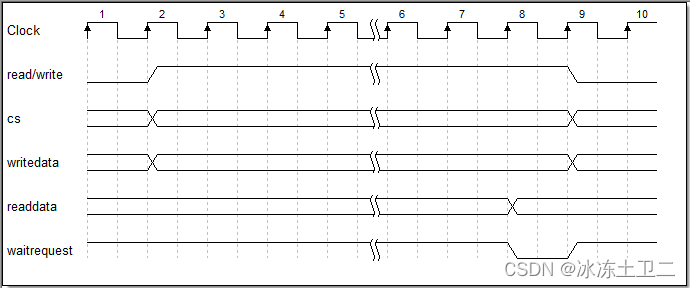
module fmcomms5_spi(input clk,input rst_n,//avalon interfaceinput [2:0] cs, //[0]:AD9361_CHIP A;[1]:AD9361_CHIP B;[2]:ADF5355input read,input write,input [9:0] address,input [27:0] writedata,output reg [7:0] readdata,output reg waitrequest,//SPI interfaceoutput reg spi_clk,output reg spi_csn0,//SPI_ENB_Aoutput reg spi_csn1,//SPI_ENB_Boutput reg spi_csn2,//ADF5355_LEoutput reg spi_sdo,input spi_sdi
);
这个模块将SPI总线转换成了Avalon总线,cs[0]选通AD9361-chip0;cs[1]选通AD9361-chip1;cs[2]选通ADF5355。cs[2]具有最高优先级,cs[1]和cs[0]具有相同的优先级。通过控制cs,可以实现分时写ADF5355、以及读写AD9361的寄存器(支持同时写和分时读2片AD9361)。
时序如下图:
avalon_mux:avalon总线多路复用
avalon_mux最大的作用是隔离各个功能代码,使各个模块看起来像是在独占SPI总线一样。这样便于设计代码层次结构以及区分功能模块。使每个想访问SPI的代码块都只需要设计一个avalon master接口,然后接到avalon_mux这个模块的一个avalon slave接口上即可。模块端口定义如下:
module avalon_mux #(parameter ADDR_WIDTH=256,DATA_WIDTH=256)
(input clk,input rst_n,input [2:0] s0_cs,input s0_read,input s0_write,input [ADDR_WIDTH-1:0] s0_address,input [DATA_WIDTH-1:0] s0_writedata,output reg [DATA_WIDTH-1:0] s0_readdata,output reg s0_waitrequest,input [2:0] s1_cs,input s1_read,input s1_write,input [ADDR_WIDTH-1:0] s1_address,input [DATA_WIDTH-1:0] s1_writedata,output reg [DATA_WIDTH-1:0] s1_readdata,output reg s1_waitrequest,/*此处有省略*/input [2:0] s7_cs,input s7_read,input s7_write,input [ADDR_WIDTH-1:0] s7_address,input [DATA_WIDTH-1:0] s7_writedata,output reg [DATA_WIDTH-1:0] s7_readdata,output reg s7_waitrequest, output reg [2:0] m_cs,output reg m_read,output reg m_write,output reg [ADDR_WIDTH-1:0] m_address,output reg [DATA_WIDTH-1:0] m_writedata,input [DATA_WIDTH-1:0] m_readdata,input m_waitrequest
);
有了这个模块的加持,最终看到的代码结构类似于这样:
ad9361_init ad9361_init_inst0(.clk (clk ),.rst_n (rst_n ),.cs (init0_cs ),.read (init0_read ),.write (init0_write ),.address (init0_address ),.writedata (init0_writedata ),.readdata (init0_readdata ),.waitrequest(init0_waitrequest ));ad9361_init ad9361_init_inst1(.clk (clk ),.rst_n (rst_n ),.cs (init1_cs ),.read (init1_read ),.write (init1_write ),.address (init1_address ),.writedata (init1_writedata ),.readdata (init1_readdata ),.waitrequest(init1_waitrequest ));adf5355_init adf5355_init_inst(.clk (clk ),.rst_n (rst_n ),.cs (adf5355_cs ),.write (adf5355_write ),.address (adf5355_address ),.writedata (adf5355_writedata ),.waitrequest(adf5355_waitrequest )); avalon_mux avalon_mux_inst(.clk (clk ),.rst_n (rst_n ),.s0_cs (init0_cs ),.s0_read (init0_read ),.s0_write (init0_write ),.s0_address (init0_address ),.s0_writedata (init0_writedata ),.s0_readdata (init0_readdata ),.s0_waitrequest (init0_waitrequest ),.s1_cs (init1_cs ),.s1_read (init1_read ),.s1_write (init1_write ),.s1_address (init1_address ),.s1_writedata (init1_writedata ),.s1_readdata (init1_readdata ),.s1_waitrequest (init1_waitrequest ),.s1_cs (adf5355_cs ),.s1_read (adf5355_read ),.s1_write (adf5355_write ),.s1_address (adf5355_address ),.s1_writedata (adf5355_writedata ),.s1_readdata (adf5355_readdata ),.s1_waitrequest (adf5355_waitrequest ),.m_cs (m_cs ),.m_read (m_read ),.m_write (m_write ),.m_address (m_address ),.m_writedata (m_writedata ),.m_readdata (m_readdata ),.m_waitrequest (m_waitrequest )); //spi driver fmcomms5_spi fmcomms5_spi_inst(.clk (clk ),.rst_n (rst_n ),.cs (m_cs ),.read (m_read ),.write (m_write ),.address (m_address ),.writedata (m_writedata ), .readdata (m_readdata ),.waitrequest (m_waitrequest ),.spi_clk (SPI_CLK ),.spi_csn0 (SPI_ENB_A ),.spi_csn1 (SPI_ENB_B ),.spi_csn2 (ADF5355_LE ),.spi_sdo (SPI_DI ),.spi_sdi (SPI_DO ));
其中两片AD9361的初始化、ADF5355的初始化都可以完全独立的设计实现,各个初始化模块只需要设计avalon的接口即可。而avalon接口到SPI就由avalon_mux和fmcomms5_spi 处理。
AD9361初始化
AD9361初始化相关内容见AD9361纯逻辑控制从0到1连载3-初始化模块以及相关文章。
ADF5355
有关ADF5355的配置可以参考下面代码:
/*初始化状态:
1.参数输入为40M,所有参考输入倍频分频器都设置为x1,使PFD = 40M
2.VCO输出3.66G,2分频输出,输出1.83G。对应9361的射频本振为915M
3.
*/
//reg0
parameter [0:0] AUTOCAL = 1; //autocal
parameter [0:0] PRESCALER = 0; //预分频器值;0=4/5;1=8/9;预分频器会限制INT值,当P为4/5时, NMIN为23;当P为8/9时, NMIN为75。
parameter [15:0] INTEGER = 91; //3660/40//reg1
parameter [23:0] FRAC1 = 8388608; //(3660 mod 40)*2^24 = 0.5*(2^24)//reg2
parameter [13:0] FRAC2 = 0; //14位辅助小数值(FRAC2)
parameter [13:0] MOD2 = 1; //14位辅助模数值(MOD2),FRAC2为0,MOD2随便取个值//reg3
parameter [0:0] SD_LOAD_RESET = 0; //禁用写入寄存器0时, Σ-Δ调制器复位。对于相位持续调整的应用,可能不希望这样做。因此,在此类情况下,可将1写入SD1位(DB30)以禁用Σ-Δ复位。
parameter [0:0] PHASE_RESYNC = 0; //要使用相位再同步特性, 必须置1。
parameter [0:0] PHASE_ADJUST = 0; //要在每次寄存器0更新时调整ADF5355的相对输出相位,应将PA1位(DB28)设为1。与再同步特性不同,该特性适用于连续调整相位的应用。
parameter [23:0] PHASE = 0; //不做连续相位调整,相位值设置为0//reg4
parameter [2:0] MUXOUT = 3'b110; //101:analog lock detect;110:digital lock detect
parameter [0:0] REF_DOUBLER = 0; //当RD2位(DB26)设置为0时,参考频率信号直接馈入10位R计数器,倍频器禁用。当此位设置为1时,参考频率加倍,然后输入10位R计数器。
parameter [0:0] RDIV2 = 0; //当RDIV2位(DB25)设置为1时, R计数器与PFD之间将插入一个二分频触发器,以扩大参考频率最大输入速率。该功能在PFD输入端提供50%占空比信号。
parameter [9:0] R_COUNTER= 1; //10位R计数器,可以细分输入参考频率(REFIN)以产生PFD的参考时钟。分频比范围是1到1023。
parameter [0:0] DOUBLER_BUF = 1; //双缓冲使能(写寄存器0后才生效)
parameter [3:0] CURRENT_SETTING= 4'b0010; //为使杂散最低,推荐设置为0.9 mA。
parameter [0:0] REF_MODE= 1; //ADF5355支持使用差分或单端参考源。对于差分源,应将参考模式位(DB9)设为1;对于单端源,应设为0。
parameter [0:0] MUX_LOGIC = 1; //为了支持逻辑兼容性, MUXOUT可设置两个逻辑电平。U5位(DB8)设为0即选择1.8 V逻辑,设为1即选择3.3 V逻辑。
parameter [0:0] PD_POLARITY= 1; //如果使用无源环路滤波器或同相有源环路滤波器,应将DB7设置为1(正)。如果使用反相有源滤波器,应将其设置为0(负)。
parameter [0:0] POWER_DOWN = 0; //设置为1时,执行关断程序。 DB6设置为0时,频率合成器恢复正常工作。在软件关断模式下, ADF5355会保留寄存器中的所有信息。
parameter [0:0] CP_THREE_STATE= 0; //电荷泵进入三态模式。 DB5设置为0时,正常工作。
parameter [0:0] COUNTER_RESET= 0; //复位ADF5355的R计数器、 N计数器和VCO频段选择。当DB4设为1时, RF频率合成器N计数器、 R计数器和VCO频段选择复位。正常工作时, DB4应设置为0。//reg5
parameter [27:0] REG5_RESERVED = 28'h0080000;//寄存器5中的这些位保留,必须按照图43所示设置,使用十六进制字0x0080000。//reg6
parameter [0:0] GATED_BLEED = 0; //渗漏电流可用于改善相位噪声和杂散,但它对锁定时间可能有影响。选通渗漏位BL10 (DB30)设置为1时,可确保渗漏电流直到数字锁定检测置位逻辑高电平时才开启。注意, 此功能要求使能数字锁定检测。
parameter [0:0] NEGATIVE_BLEED = 1; //对于大多数应用,建议使用恒定负渗漏,因为它能改善电荷泵的线性度,从而降低噪声和杂散。要使能负渗漏,应向BL9(位DB29)写入1;要禁用负渗漏,应向BL9(位DB29)写入0。
parameter [0:0] FEED_BACK_SELECT = 1; //D13(位DB24)选择从VCO输出到N计数器的反馈。 D13设置为1时,信号直接从VCO获得。此位设置为0时,信号从输出分频器的输出获得。这些分频器使得输出可涵盖较宽的频率范围(3.4 GHz至6.8 GHz)。当计数器使能且反馈信号从其输出获得时,两个独立配置PLL的RF输出信号同相。分频反馈在需要对信号进行正干涉以提高功率的一些应用中很有用。
parameter [2:0] RF_DIVIDER_SELECT = 1; //初始化为1,2分频输出
parameter [7:0] CHARGE_PUMP_BLEED_CURRENT=7;//IBLEED值,值要确保4/N < IBLEED/ICP < 10/N,可优化器件的相位噪声和杂散水平。ICP前面设置为0.9mA了,N是PFD到VCO的倍频因子
parameter [0:0] MTLD = 0; //设置为1,则切断RF输出级的电源电流,直到数字锁定检测电路检测到器件实现锁定为止。
parameter [0:0] RF_OUTB = 0; //使能或禁用高频RF输出(RFOUTB)。 设置为0时,高频RF输出使能。 设置为1时,辅助RF输出禁用。
parameter [0:0] RF_OUTA = 1; //D3(位DB6)使能或禁用主RF输出(RFOUTA+/RFOUTA−)。 DB6设置为0时,主RF输出禁用。 DB6设置为1时,主RF输出使能。
parameter [1:0] RF_OUT_POWER = 2'b10; //D2和D1(位[DB5:DB4])设置主RF输出功率水平的值(参见图44)。0=-4dBm;1=-1dBm;2=2dBm;3=5dBm//reg7
parameter [0:0] LE_SYNC = 1; //设置为1时,位DB25确保加载使能(LE)沿与参考输入频率的上升沿内部同步。该同步可防止参考与RF分频器同时在参考频率的下降沿加载的罕见情况(可能导致锁定时间延长)。
parameter [1:0] LD_CYCLE_COUNT = 2'b00; //LD5和LD4(位[DB9:DB8])设置锁定检测电路连续计数多少周期后才将锁定检测置位高电平
parameter [0:0] LOL_MODE = 1; //对于可能会移除参考(REFIN)的固定频率应用,例如定时应用,应将LOL(位DB7)设置为1。标准锁定检测电路假设REFIN始终存在,但对于定时应用,情况可能并非如此。此功能通过将DB7设置为1来使能。
parameter [1:0] FRAC_N_LD_PRECISION = 2'b11;//LD3和LD2(位[DB6:DB5])设置小数N模式下锁定检测电路的精度。 LDP可设置为5 ns、 6 ns、 8 ns或12 ns。使用渗漏电流时,应使用12 ns。
parameter [0:0] LD_MODE = 0; //锁定检测模式(LDM)如果LD1(位DB4)设置为0,则每个参考周期由小数N锁定检测精度设置,如“小数N锁定检测计数(LDC)”部分所述。DB4设置为1时,各参考周期为2.9 ns长,这更适合整数N分频应用。//reg8
parameter [27:0] REG8_RESERVED = 28'h102D402;//此寄存器中的这些位保留,必须按照图46所示设置,使用十六进制字0x102D402//reg9
parameter [7:0] VCO_BAND_DIVISION = 17; //VC8至VC1(位[DB31:DB24])设置VCO频段分频时钟的值。用PFD/(频段分频× 16)确定此时钟的值,使得结果小于150 kHz。
parameter [9:0] TIMEOUT = 67; //TL10至TL1(位[DB23:DB14])设置VCO频段选择的超时值。此值用作其他VCO校准设置中的变量。
parameter [4:0] AUTOMATIC_LEVEL_TIMEOUT = 30; //保证(TIMEOUT × AUTOMATIC_LEVEL_TIMEOUT/PFD频率) > 50 µs
parameter [4:0] SYNTHESIZER_LOCK_TIMEOUT = 12; //(TIMEOUT ×SYNTHESIZER_LOCK_TIMEOUT/PFD频率) > 20 µs//reg10
parameter [7:0] ADC_CLOCK_DIVIDER = 100; //PFD/((ADC_CLK × 4) × 2) < 100 kHz
parameter [0:0] ADC_CONVERSION = 1; //AE2(位DB5)确保对寄存器10执行写操作后, ADC执行转换。建议使能这种模式。
parameter [0:0] ADC_ENABLE = 1; //AE1(位DB4)设置为1时, ADC上电以执行温度相关的VTUNE校准。建议总是使用该功能。//reg11
parameter [27:0] REG11_RESERVED = 28'h0061300;//此寄存器中的这些位保留,必须按照图49所示设置,使用十六进制字0x0061300//reg12
parameter [15:0] RESYNC_CLOCK = 0;//When not using phase resync, set these bits to 1 for normaloperationfunction [31:0] adf5355_lut;
input [7:0] index;begincase(index)8'd0 :adf5355_lut={4'hc,RESYNC_CLOCK,12'b0000_0100_0001};8'd1 :adf5355_lut={4'hb,REG11_RESERVED};8'd2 :adf5355_lut={4'ha,18'b00_0000_0011_0000_0000,ADC_CLOCK_DIVIDER,ADC_CONVERSION,ADC_ENABLE};8'd3 :adf5355_lut={4'h9,VCO_BAND_DIVISION,TIMEOUT,AUTOMATIC_LEVEL_TIMEOUT,SYNTHESIZER_LOCK_TIMEOUT};8'd4 :adf5355_lut={4'h8,REG8_RESERVED};8'd5 :adf5355_lut={4'h7,6'b000100,LE_SYNC,15'd0,LD_CYCLE_COUNT,LOL_MODE,FRAC_N_LD_PRECISION,LD_MODE};8'd6 :adf5355_lut={4'h6,1'b0,GATED_BLEED,NEGATIVE_BLEED,4'b1010,FEED_BACK_SELECT,RF_DIVIDER_SELECT,CHARGE_PUMP_BLEED_CURRENT,1'b0,MTLD,RF_OUTB,3'b000,RF_OUTA,RF_OUT_POWER};8'd7 :adf5355_lut={4'h5,REG5_RESERVED};8'd8 :adf5355_lut={4'h4,2'b00,MUXOUT,REF_DOUBLER,RDIV2,R_COUNTER,DOUBLER_BUF,CURRENT_SETTING,REF_MODE,MUX_LOGIC,PD_POLARITY,POWER_DOWN,CP_THREE_STATE,COUNTER_RESET};8'd9 :adf5355_lut={4'h3,1'b0,SD_LOAD_RESET,PHASE_RESYNC,PHASE_ADJUST,PHASE};8'd10:adf5355_lut={4'h2,FRAC2,MOD2};8'd11:adf5355_lut={4'h1,4'b0000,FRAC1};8'd12:adf5355_lut={4'hf,28'd0}; //delay8'd13:adf5355_lut={4'h0,10'b0000000000,AUTOCAL,PRESCALER,INTEGER};default:adf5355_lut=32'hffffffff;endcaseend
endfunction
初始化的方法就是依次执行adf5355_lut这个函数列表的指令,比如第一条指令是写{RESYNC_CLOCK,12’b0000_0100_0001}到4’hc这个寄存器。
如果需要动态修改ADF5355的频率,则执行下面的命令列表即可:
function [31:0] cmd;input [7:0] index;begincase(index) 0 :cmd={4'ha,18'h00300,ADC_CLOCK_DIVIDER,ADC_CONVERSION,ADC_ENABLE};1 :cmd={4'h4,2'b00,MUXOUT,REF_DOUBLER,RDIV2,R_COUNTER,DOUBLER_BUF,CURRENT_SETTING,REF_MODE,MUX_LOGIC,PD_POLARITY,POWER_DOWN,CP_THREE_STATE,1'b1};2 :cmd={4'h6,1'b0,GATED_BLEED,NEGATIVE_BLEED,4'b1010,FEED_BACK_SELECT,lo_div,CHARGE_PUMP_BLEED_CURRENT,1'b0,MTLD,RF_OUTB,3'b000,RF_OUTA,RF_OUT_POWER}; 3 :cmd={4'h2,lo_frac2,lo_mod2};4 :cmd={4'h1,4'd0,lo_frac1};5 :cmd={4'h0,10'd0,1'b0,PRESCALER,lo_int};6 :cmd={4'h4,2'b00,MUXOUT,REF_DOUBLER,RDIV2,R_COUNTER,DOUBLER_BUF,CURRENT_SETTING,REF_MODE,MUX_LOGIC,PD_POLARITY,POWER_DOWN,CP_THREE_STATE,1'b0};7 :cmd={4'hf,28'd0};8 :cmd={4'h0,10'd0,AUTOCAL,PRESCALER,lo_int};default:cmd=32'hffffffff;endcaseendendfunction
其中lo_div,lo_int,lo_frac1,lo_frac2,lo_mod2根据频率计算得出,具体计算方法由下面这个模块得到。
module adf5355_freq2param(input clk,input rst_n,input [33:0] lo_freq,output reg [2:0] lo_div, output reg [15:0] lo_int,output reg [23:0] lo_frac1, output reg [13:0] lo_frac2,output reg [13:0] lo_mod2,output reg param_valid
);
写不动了,先贴个顶层在这里,后面有时间再补吧
module zc706_fmcomms5(// input USRCLK_P, //156.25M// input USRCLK_N,input REF_CLK_FMC_P,input REF_CLK_FMC_N,//sync pinoutput SYNC_IN,//spi pinsoutput SPI_ENB_A,output SPI_ENB_B,output SPI_CLK,output SPI_DI,input SPI_DO,input ADF5355_LOCK,output ADF5355_RF_EN,output ADF5355_LE,output reg CAL_SW_1,output reg CAL_SW_2,output reg CAL_SW_3,output reg CAL_SW_4,//fmc power enableoutput PG_FMC,output GPIO_LED_RIGTH,output GPIO_LED_LEFT,output GPIO_LED_CENTER,output GPIO_LED_0,//chip Aoutput RESET_A,output EN_AGC_A, output ENABLE_A,output TXNRX_A,output [3:0] CTRL_IN_A,input [7:0] CTRL_OUT_A,output FB_CLK_P_A,output FB_CLK_N_A,output [5:0] TX_D_P_A,output [5:0] TX_D_N_A,output TX_FRAME_P_A,output TX_FRAME_N_A,input DATA_CLK_P_A, input DATA_CLK_N_A, input [5:0] RX_D_P_A, input [5:0] RX_D_N_A,input RX_FRAME_P_A, input RX_FRAME_N_A,//chip Boutput RESET_B,output EN_AGC_B, output ENABLE_B,output TXNRX_B,output [3:0] CTRL_IN_B,input [7:0] CTRL_OUT_B,output FB_CLK_P_B,output FB_CLK_N_B,output [5:0] TX_D_P_B,output [5:0] TX_D_N_B,output TX_FRAME_P_B,output TX_FRAME_N_B,input DATA_CLK_P_B, input DATA_CLK_N_B, input [5:0] RX_D_P_B, input [5:0] RX_D_N_B,input RX_FRAME_P_B, input RX_FRAME_N_B,input [3:0] GPIO_DIP_SW
);zynq_wrapper zynq_wrapper();assign PG_FMC = 1;//AD9361 config clock and init stateswire clk_40m;wire sample_clk;wire lock_out;wire vio_mcs_rst;wire vio_cal_rst;wire vio_rd_lock;wire vio_bist_rx;wire vio_bist_loop;wire [32:0] vio_lo_freq;wire [7:0] vio_reg006,vio_reg007;wire [7:0] vio_mgc1_value,vio_mgc2_value;wire [8:0] vio_tx1_att,vio_tx2_att;wire vio_alert;wire vio_cal_busy;wire vio_tx_on,vio_rx_on;wire vio_rst;wire vio_ext_lo_en;wire init_done_a,init_done_b;wire config_done_a,config_done_b;wire mcs_done;reg mcs_done_r1,mcs_done_r2;wire cal_busy;reg cal_busy_r1,cal_busy_r2;wire adf5355_config_done;reg adf5355_config_done_r1,adf5355_config_done_r2;always @ (posedge clk_40m){cal_busy_r2,cal_busy_r1}<={cal_busy_r1,cal_busy};always @ (posedge sample_clk)begin{mcs_done_r2,mcs_done_r1}<={mcs_done_r1,mcs_done};{adf5355_config_done_r2,adf5355_config_done_r1}<={adf5355_config_done_r1,adf5355_config_done};endreg [25:0] alive_cnt;always @ (posedge clk_40m)alive_cnt<=alive_cnt+1;assign GPIO_LED_RIGTH=alive_cnt[25];assign GPIO_LED_LEFT=alive_cnt[25];assign GPIO_LED_CENTER=alive_cnt[25];assign GPIO_LED_0=alive_cnt[25];clk_wiz_1 clk_wiz_1_inst(.clk_out1 (clk_40m),.reset (1'b0),.locked (locked),.clk_in1_p (REF_CLK_FMC_P),.clk_in1_n (REF_CLK_FMC_N));assign rst_n = locked && !vio_rst;wire [2:0] s0_cs=3'b001;wire s0_read;wire s0_write;wire [7:0] s0_writedata;wire [7:0] s0_readdata;wire [9:0] s0_address;wire s0_waitrequest; wire [2:0] s1_cs=3'b010;wire s1_read;wire s1_write;wire [7:0] s1_writedata;wire [7:0] s1_readdata;wire [9:0] s1_address;wire s1_waitrequest;wire [2:0] mcs_cs;wire mcs_read;wire mcs_write;wire [7:0] mcs_writedata;wire [7:0] mcs_readdata;wire [9:0] mcs_address;wire mcs_waitrequest; wire [2:0] debug_cs;wire debug_read;wire debug_write;wire [27:0] debug_writedata;wire [7:0] debug_readdata;wire [9:0] debug_address;wire debug_waitrequest;wire [2:0] adf5355_init_cs = 3'b100;wire adf5355_init_read;wire adf5355_init_write;wire [27:0] adf5355_init_writedata;wire [3:0] adf5355_init_address;wire adf5355_init_waitrequest;wire [2:0] adf5355_config_cs = 3'b100;wire adf5355_config_read;wire adf5355_config_write;wire [27:0] adf5355_config_writedata;wire [3:0] adf5355_config_address;wire adf5355_config_waitrequest;wire [2:0] m_cs;wire m_read;wire m_write;wire [27:0] m_writedata;wire [7:0] m_readdata;wire [9:0] m_address;wire m_waitrequest;/*****************************************************************/ ad9361_config ad9361_config_inst0 (.clk (clk_40m ),.rst_n (rst_n ),.read (s0_read ),.write (s0_write ),.writedata (s0_writedata ),.readdata (s0_readdata ),.address (s0_address ),.waitrequest (s0_waitrequest ),.txnrx (TXNRX_A ),.enable (ENABLE_A ),.chip_rst_n (RESET_A ),.init_done (init_done_a ),.config_done (config_done_a ),.rd_lock (vio_rd_lock ),.mgc1_value (vio_mgc1_value ),.mgc2_value (vio_mgc2_value ),.bist_rx (vio_bist_rx ),.bist_loop (vio_bist_loop ),.reg006 (vio_reg006 ),.reg007 (vio_reg007 ),.tx1_att (vio_tx1_att ),.tx2_att (vio_tx2_att ),.tx_lo_freq (vio_lo_freq ),.rx_lo_freq (vio_lo_freq ),.alert (vio_alert ),.ext_lo_en (vio_ext_lo_en ),.cal_busy (cal_busy_r2 ),.tx_on (vio_tx_on ),.rx_on (vio_rx_on )); ad9361_config ad9361_config_inst1 (.clk (clk_40m ),.rst_n (rst_n ),.read (s1_read ),.write (s1_write ),.writedata (s1_writedata ),.readdata (s1_readdata ),.address (s1_address ),.waitrequest (s1_waitrequest ),.txnrx (TXNRX_B ),.enable (ENABLE_B ),.chip_rst_n (RESET_B ),.init_done (init_done_b ),.config_done (config_done_b ),.rd_lock (vio_rd_lock ),.mgc1_value (vio_mgc1_value ),.mgc2_value (vio_mgc2_value ),.bist_rx (vio_bist_rx ),.bist_loop (vio_bist_loop ),.reg006 (vio_reg006 ),.reg007 (vio_reg007 ),.tx1_att (vio_tx1_att ),.tx2_att (vio_tx2_att ),.tx_lo_freq (vio_lo_freq ),.rx_lo_freq (vio_lo_freq ),.alert (vio_alert ),.ext_lo_en (vio_ext_lo_en ),.cal_busy (cal_busy_r2 ),.tx_on (vio_tx_on ),.rx_on (vio_rx_on ));wire tx_sel,rx_sel;always @ (posedge sample_clk)beginCAL_SW_1 <= !tx_sel; //tx_sel=0:A selected;tx_sel=1:B selectedCAL_SW_2 <= !rx_sel; //tx_sel=0:A selected;tx_sel=1:B selectedendvio_top vio_top_inst(.clk (clk_40m ), .probe_out0 (vio_mcs_rst ),.probe_out1 (vio_cal_busy ),.probe_out2 (vio_bist_rx ),.probe_out3 (vio_bist_loop ),.probe_out4 (vio_lo_freq ),.probe_out5 (vio_rd_lock ),.probe_out6 (vio_reg006 ),.probe_out7 (vio_reg007 ),.probe_out8 (vio_mgc1_value ),.probe_out9 (vio_mgc2_value ),.probe_out10(vio_tx1_att ),.probe_out11(vio_tx2_att ),.probe_out12(vio_alert ),.probe_out13(vio_tx_on ),.probe_out14(vio_rx_on ),.probe_out15(vio_rst ));wire adf5355_init_done;adf5355_init adf5355_init_inst(.clk (clk_40m ),.rst_n (rst_n ),.write (adf5355_init_write ),.address (adf5355_init_address ),.writedata (adf5355_init_writedata ),.waitrequest(adf5355_init_waitrequest ),.init_done (adf5355_init_done )); mcs mcs_inst(.clk (clk_40m ),.rst_n (rst_n ),.cs (mcs_cs ),.write (mcs_write ),.read (mcs_read ),.address (mcs_address ),.writedata (mcs_writedata ),.readdata (mcs_readdata ),.waitrequest (mcs_waitrequest ),.mcs_done (mcs_done ),.sync_in (SYNC_IN )); adf5355_config adf5355_config(.clk (clk_40m ),.rst_n (rst_n ),.write (adf5355_config_write ),.writedata (adf5355_config_writedata ),.address (adf5355_config_address ),.waitrequest(adf5355_config_waitrequest ),.freq ({lo_freq ));avalon_mux avalon_mux_inst(.clk (clk_40m ),.rst_n (rst_n ),.s0_cs (s0_cs ),.s0_read (s0_read ),.s0_write (s0_write ),.s0_address (s0_address ),.s0_writedata (s0_writedata ),.s0_readdata (s0_readdata ),.s0_waitrequest (s0_waitrequest ),.s1_cs (s1_cs ),.s1_read (s1_read ),.s1_write (s1_write ),.s1_address (s1_address ),.s1_writedata (s1_writedata ),.s1_readdata (s1_readdata ),.s1_waitrequest (s1_waitrequest ),.s2_cs (mcs_cs ),.s2_read (mcs_read ),.s2_write (mcs_write ),.s2_address (mcs_address ),.s2_writedata (mcs_writedata ),.s2_readdata (mcs_readdata ),.s2_waitrequest (mcs_waitrequest ),.s3_cs (debug_cs ),.s3_read (debug_read ),.s3_write (debug_write ),.s3_address (debug_address ),.s3_writedata (debug_writedata ),.s3_readdata (debug_readdata ),.s3_waitrequest (debug_waitrequest ),.s4_cs (adf5355_init_cs ),.s4_write (adf5355_init_write ),.s4_address (adf5355_init_address ),.s4_writedata (adf5355_init_writedata ),.s4_waitrequest (adf5355_init_waitrequest ),.s5_cs (adf5355_config_cs ),.s5_write (adf5355_config_write ),.s5_address (adf5355_config_address ),.s5_writedata (adf5355_config_writedata ),.s5_waitrequest (adf5355_config_waitrequest ),.m_cs (m_cs ),.m_read (m_read ),.m_write (m_write ),.m_address (m_address ),.m_writedata (m_writedata ),.m_readdata (m_readdata ),.m_waitrequest (m_waitrequest )); //spi driver fmcomms5_spi fmcomms5_spi_inst(.clk (clk_40m ),.rst_n (locked ),.cs (m_cs ),.read (m_read ),.write (m_write ),.address (m_address ),.writedata (m_writedata ), .readdata (m_readdata ),.waitrequest (m_waitrequest ),.spi_clk (SPI_CLK ),.spi_csn0 (SPI_ENB_A ),.spi_csn1 (SPI_ENB_B ),.spi_csn2 (ADF5355_LE ),.spi_sdo (SPI_DI ),.spi_sdi (SPI_DO ));assign ADF5355_RF_EN = 1;/**********************数据接口*************************/data_if_top data_if_top_inst(.sample_clk (sample_clk ),.lock_out (lock_out ),.dac0_data_i1 (dac0_data_i1 ),.dac0_data_q1 (dac0_data_q1 ),.dac0_data_i2 (dac0_data_i2 ),.dac0_data_q2 (dac0_data_q2 ),.adc0_data_i1 (adc0_data_i1 ),.adc0_data_q1 (adc0_data_q1 ),.adc0_data_i2 (adc0_data_i2 ),.adc0_data_q2 (adc0_data_q2 ),.dac1_data_i1 (dac1_data_i1 ),.dac1_data_q1 (dac1_data_q1 ),.dac1_data_i2 (dac1_data_i2 ),.dac1_data_q2 (dac1_data_q2 ),.adc1_data_i1 (adc1_data_i1 ),.adc1_data_q1 (adc1_data_q1 ),.adc1_data_i2 (adc1_data_i2 ),.adc1_data_q2 (adc1_data_q2 ),.rx0_data_clk_p (DATA_CLK_P_A ),.rx0_data_clk_n (DATA_CLK_N_A ),.rx0_frame_in_p (RX_FRAME_P_A ),.rx0_frame_in_n (RX_FRAME_N_A ),.rx0_data_in_p (RX_D_P_A ),.rx0_data_in_n (RX_D_N_A ),.tx0_clk_out_p (FB_CLK_P_A ),.tx0_clk_out_n (FB_CLK_N_A ),.tx0_frame_out_p (TX_FRAME_P_A ),.tx0_frame_out_n (TX_FRAME_N_A ),.tx0_data_out_p (TX_D_P_A ),.tx0_data_out_n (TX_D_N_A ),.rx1_data_clk_p (DATA_CLK_P_B ),.rx1_data_clk_n (DATA_CLK_N_B ),.rx1_frame_in_p (RX_FRAME_P_B ),.rx1_frame_in_n (RX_FRAME_N_B ),.rx1_data_in_p (RX_D_P_B ),.rx1_data_in_n (RX_D_N_B ),.tx1_clk_out_p (FB_CLK_P_B ),.tx1_clk_out_n (FB_CLK_N_B ),.tx1_frame_out_p (TX_FRAME_P_B ),.tx1_frame_out_n (TX_FRAME_N_B ),.tx1_data_out_p (TX_D_P_B ),.tx1_data_out_n (TX_D_N_B ),.cal_rst_n (ADF5355_LOCK ),.cal_busy (cal_busy ),.tx_sel (tx_sel ),.rx_sel (rx_sel )); endmodule相关文章:
AD9361多片同步设计方法
本文基于ZC706FMCOMMS5的平台,介绍了多片AD9361同步的方法。并将该设计移植到自行设计的ZYNQ70354片AD9361(实现8路同步收发)的电路板上。本设计采用纯逻辑的方式,仅使用了ZYNQ芯片的PL部分。 9361多芯片同步主要包括基带同步和射频同步两大块任务。其中…...

2024/2/7 图的基础知识
图的存储 B3643 图的存储 - 洛谷 | 计算机科学教育新生态 (luogu.com.cn) 思路:mp[n][n]用来存邻接矩阵,二维vector用来存每个点连的点 完整代码: #include <bits/stdc.h> #define int long long const int N 1e5 10; int n, m; …...
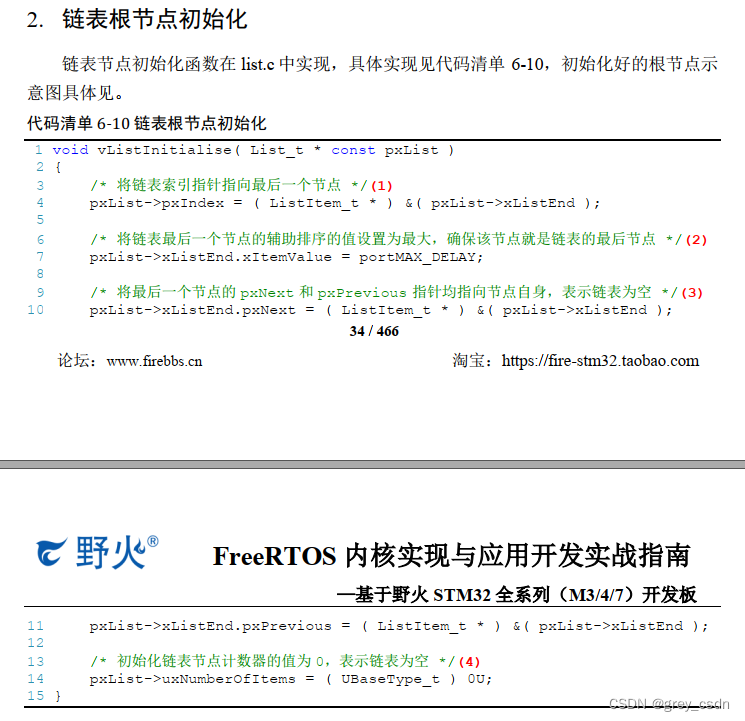
1897_野火FreeRTOS教程阅读笔记_链表
1897_野火FreeRTOS教程阅读笔记_链表 全部学习汇总: g_FreeRTOS: FreeRTOS学习笔记 (gitee.com) 之前我自己通过直接啃代码的方式对FreeRTOS也算是有了一点理解了,这次趁着些许闲暇翻看一下野火的FreeRTOS教程。一者算是一种复习;二者可能对自…...

CTFshow web(php命令执行 45-49)
基础知识: 1.绕过cat使用: tac more less head tac tail nl od(二进制查看) vi vim sort uniq rev 2.绕过空格用: %09 <> ${IFS} $IFS$ {cat,fl*} %20 注: %09 ##(Tab) %20 ##(spa…...
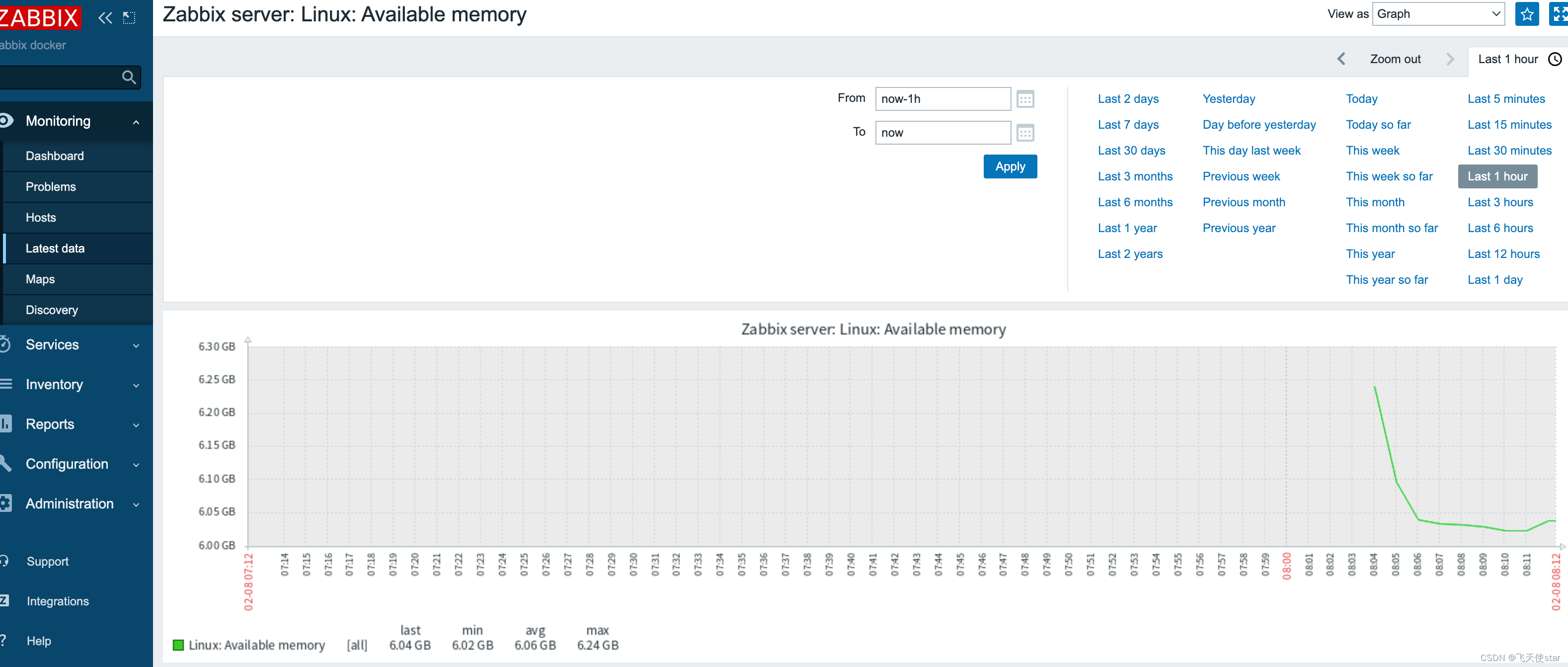
飞天使-linux操作的一些技巧与知识点8-zabbix6.0 容器搭建
文章目录 安装docker安装步骤mysql下载镜像安装zabbix 使用zabbix非host模式创建 测试效果 安装docker 1. 配置官方 yum 源$ sudo yum install -y yum-utils $ sudo yum-config-manager \--add-repo \https://download.docker.com/linux/centos/docker-ce.repo2. 安装 Docker$ …...

51 单片机入门 400 例
1 IO输出 点亮1个LED灯方法1 2 IO输出 点亮1个LED灯方法2 3 IO输出 点亮多个LED灯方法1 4 IO输出 点亮多个LED灯方法2 5 闪烁1个LED 6 不同频率闪烁1个LED灯 7 不同频率闪烁多个LED灯…...

贪心算法的应用
考虑最大利润 输入:种类数、需求量、各种类的库存量、各种类的总价 输出:最大利润 #include <iostream> #include <algorithm>//调用sort排序 using namespace std; struct mooncake{double store;double price;double tprice; }cake[1000]…...

CentOS基于volatility2的内存取证实验
CentOS,Redhat和Fedora 都是Red Hat体系,采用yum管理器,不同于Debian、Ubuntu作为Debian体系使用apt 本文以CentOS为例,采用avml制作内存镜像,并利用volatility官方所给工具制作profile符号文件,进行简单的…...

HLS 三角函数报错:undefined reference to ‘cordic_apfixed::circ_table_arctan_128‘
最近在通过HLS实现一些算法,其中用到了hls::cos函数,写完代码编译报错: ../Vitis_HLS/hls_cordic_apfixed.h:229: undefined reference to cordic_apfixed::circ_table_arctan_128 build/xf_computePhaseMap_accel.o: In function void cord…...

【汇编】简单的linux汇编语言程序
一、Linux系统汇编语言 Linux系统上的汇编语言可以使用不同的语法风格,主要包括Intel语法和AT&T语法。这两种语法有各自的特点和风格区别,尽管它们表示的底层机器指令相同。下面分别对两种语法进行简要说明: Intel语法 Intel语法是由I…...
Fink CDC数据同步(四)Mysql数据同步到Kafka
依赖项 将下列依赖包放在flink/lib flink-sql-connector-kafka-1.16.2 创建映射表 创建MySQL映射表 CREATE TABLE if not exists mysql_user (id int,name STRING,birth STRING,gender STRING,PRIMARY KEY (id) NOT ENFORCED ) WITH (connector mysql-cdc,hostn…...

Adb offline疑难杂症解决方案大全记录
无线/有线Adb offline依次尝试下面步骤: adb kill-server && adb start-server adb reconnect offline 多次 adb tcpip 5555 后重试 检查有线端口5037、无线5555占用,排除改名的adb或其他应用占用 换USB线和USB口拔插、确保同一WiFi下࿰…...
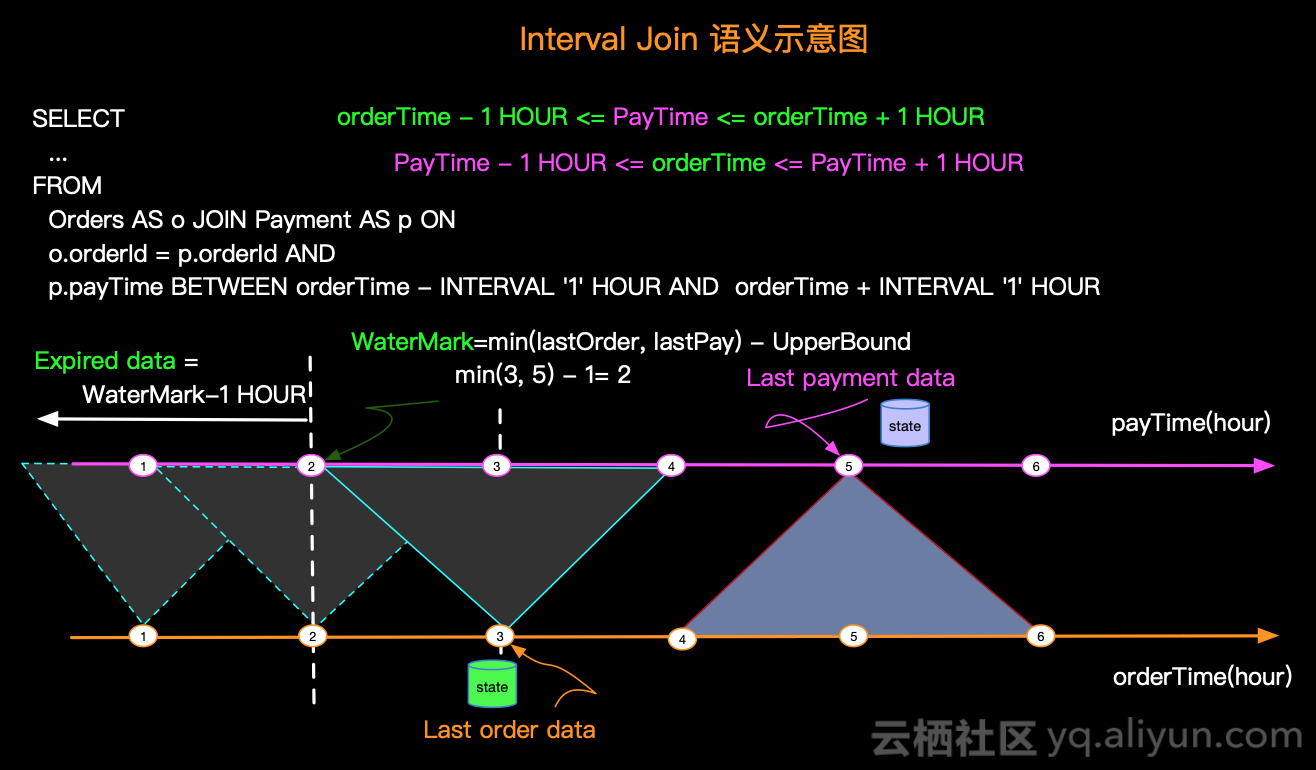
详述FlinkSql Join操作
FlinkSql 的 Join Flink 官网将其分为了 Joins 和 Window Joins两个大类,其中里面又分了很多 Join 方式 参考文档: Joins | Apache Flink Window JOIN | Apache Flink Joins 官网介绍共有6种方式: Regular Join:流与流的 Joi…...

Ajax+JSON学习二
AjaxJSON学习二 文章目录 前言三、前后端数据交互3.1. GET请求3.2. POST请求3.3. jQuery 中的 Ajax3.4. Ajax 的替代品:fetch3.5. 小结 四、JSON4.1. JSON简介4.2. JSON 语法规则4.3. JSON的解析和序列化 总结 前言 三、前后端数据交互 3.1. GET请求 GET 请求一般用…...
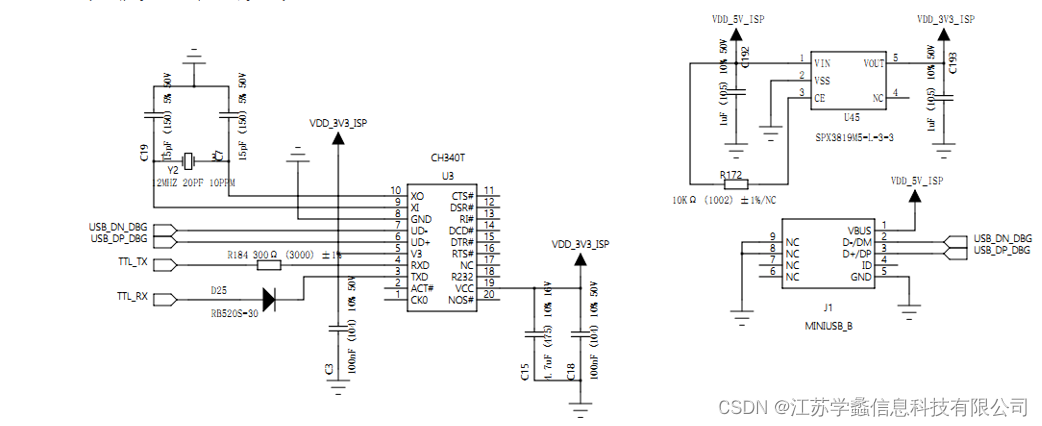
STM32单片机的基本原理与应用(六)
串口测试实验 基本原理 在串口实验中,是通过mini_USB线搭建终端与电脑端(也可称终端,为做区分称电脑端)的“桥梁”,电脑端的串口调试助手通过mini_USB线向终端发送信息,由CH340芯片将USB接口进行转换&…...

《MySQL 简易速速上手小册》第4章:数据安全性管理(2024 最新版)
文章目录 4.1 用户认证和权限控制4.1.1 基础知识4.1.2 重点案例:使用 Python 管理 MySQL 用户权限4.1.3 拓展案例 4.2 防止 SQL 注入和其他安全威胁4.2.1 基础知识4.2.2 重点案例:使用 Python 和 MySQL 进行安全的数据查询4.2.3 拓展案例 4.3 数据加密和…...
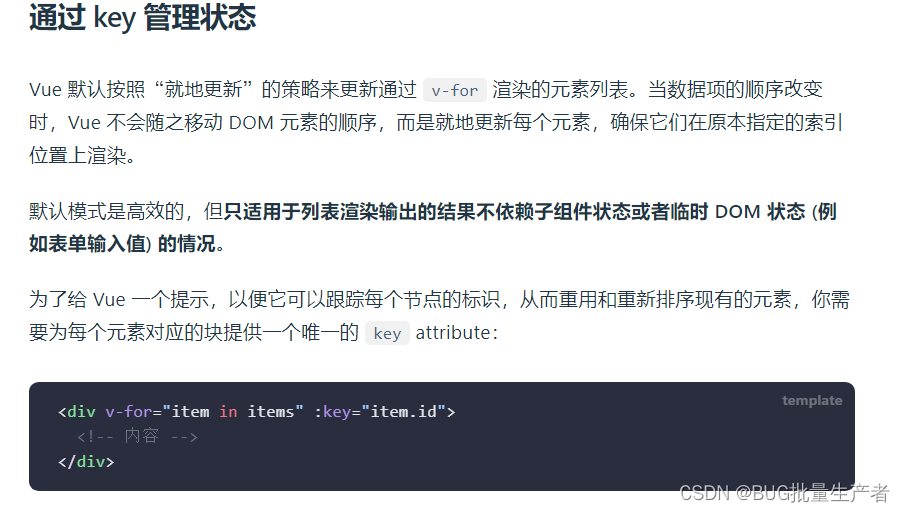
VUE学习之路——列表渲染
<p v-for"item in items">{{ item }}</p>使用v-for进行列表的渲染。 这仅仅是一个简单的demo,使用v-for可以用来遍历数组和对象,具体如下: 注意:遍历数组或对象的时候,()…...
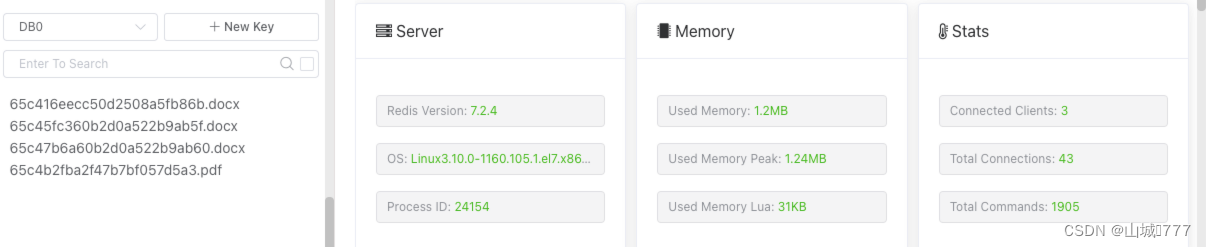
CentOS 安装 redis 7.2
nginx官网 https://redis.io/download/ 把鼠标放到这里,复制下载地址 在服务器找个文件夹执行命令 wget https://github.com/redis/redis/archive/7.2.4.tar.gz tar -zxvf 7.2.4.tar.gz make make install 看到这几行就说明安装成功了 不放心的话再查看下b…...

运维自动化bingo前端
项目目录结构介绍 项目创建完成之后,我们会看到bingo_web项目其实是一个文件夹,我们进入到文件夹内部就会发现一些目录和文件,我们简单回顾一下里面的部分核心目录与文件。 ├─node_modules/ # node的包目录,项目运行的依赖包…...
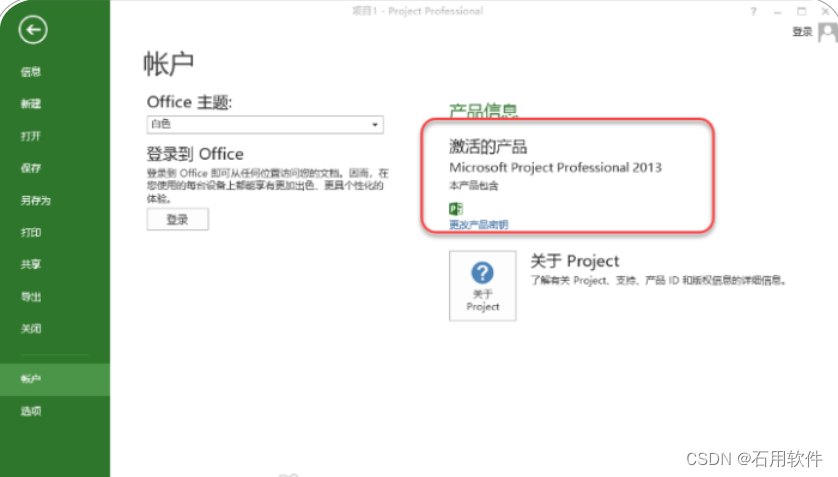
Project2013下载安装教程,保姆级教程,附安装包和工具
前言 Project是一款项目管理软件,不仅可以快速、准确地创建项目计划,而且可以帮助项目经理实现项目进度、成本的控制、分析和预测,使项目工期大大缩短,资源得到有效利用,提高经济效益。软件设计目的在于协助专案经理发…...
eNSP-Cloud(实现本地电脑与eNSP内设备之间通信)
说明: 想象一下,你正在用eNSP搭建一个虚拟的网络世界,里面有虚拟的路由器、交换机、电脑(PC)等等。这些设备都在你的电脑里面“运行”,它们之间可以互相通信,就像一个封闭的小王国。 但是&#…...

Android Wi-Fi 连接失败日志分析
1. Android wifi 关键日志总结 (1) Wi-Fi 断开 (CTRL-EVENT-DISCONNECTED reason3) 日志相关部分: 06-05 10:48:40.987 943 943 I wpa_supplicant: wlan0: CTRL-EVENT-DISCONNECTED bssid44:9b:c1:57:a8:90 reason3 locally_generated1解析: CTR…...

CTF show Web 红包题第六弹
提示 1.不是SQL注入 2.需要找关键源码 思路 进入页面发现是一个登录框,很难让人不联想到SQL注入,但提示都说了不是SQL注入,所以就不往这方面想了 先查看一下网页源码,发现一段JavaScript代码,有一个关键类ctfs…...

DeepSeek 赋能智慧能源:微电网优化调度的智能革新路径
目录 一、智慧能源微电网优化调度概述1.1 智慧能源微电网概念1.2 优化调度的重要性1.3 目前面临的挑战 二、DeepSeek 技术探秘2.1 DeepSeek 技术原理2.2 DeepSeek 独特优势2.3 DeepSeek 在 AI 领域地位 三、DeepSeek 在微电网优化调度中的应用剖析3.1 数据处理与分析3.2 预测与…...

Python:操作 Excel 折叠
💖亲爱的技术爱好者们,热烈欢迎来到 Kant2048 的博客!我是 Thomas Kant,很开心能在CSDN上与你们相遇~💖 本博客的精华专栏: 【自动化测试】 【测试经验】 【人工智能】 【Python】 Python 操作 Excel 系列 读取单元格数据按行写入设置行高和列宽自动调整行高和列宽水平…...

可靠性+灵活性:电力载波技术在楼宇自控中的核心价值
可靠性灵活性:电力载波技术在楼宇自控中的核心价值 在智能楼宇的自动化控制中,电力载波技术(PLC)凭借其独特的优势,正成为构建高效、稳定、灵活系统的核心解决方案。它利用现有电力线路传输数据,无需额外布…...

第25节 Node.js 断言测试
Node.js的assert模块主要用于编写程序的单元测试时使用,通过断言可以提早发现和排查出错误。 稳定性: 5 - 锁定 这个模块可用于应用的单元测试,通过 require(assert) 可以使用这个模块。 assert.fail(actual, expected, message, operator) 使用参数…...

【HTML-16】深入理解HTML中的块元素与行内元素
HTML元素根据其显示特性可以分为两大类:块元素(Block-level Elements)和行内元素(Inline Elements)。理解这两者的区别对于构建良好的网页布局至关重要。本文将全面解析这两种元素的特性、区别以及实际应用场景。 1. 块元素(Block-level Elements) 1.1 基本特性 …...

【python异步多线程】异步多线程爬虫代码示例
claude生成的python多线程、异步代码示例,模拟20个网页的爬取,每个网页假设要0.5-2秒完成。 代码 Python多线程爬虫教程 核心概念 多线程:允许程序同时执行多个任务,提高IO密集型任务(如网络请求)的效率…...
前端开发面试题总结-JavaScript篇(一)
文章目录 JavaScript高频问答一、作用域与闭包1.什么是闭包(Closure)?闭包有什么应用场景和潜在问题?2.解释 JavaScript 的作用域链(Scope Chain) 二、原型与继承3.原型链是什么?如何实现继承&a…...