蓝桥杯嵌入式第8届真题(完成) STM32G431
蓝桥杯嵌入式第8届真题(完成) STM32G431
题目
分析和代码
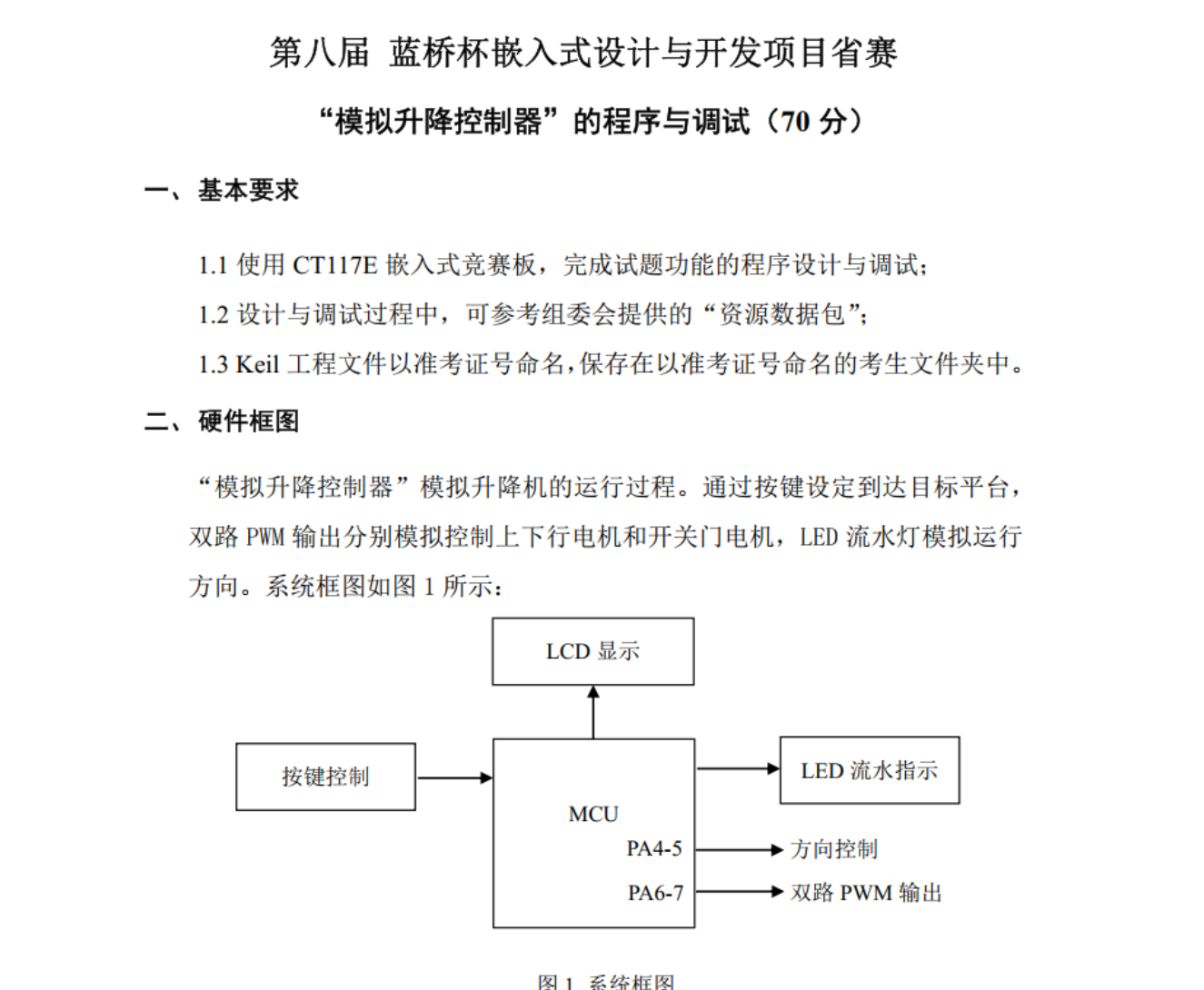
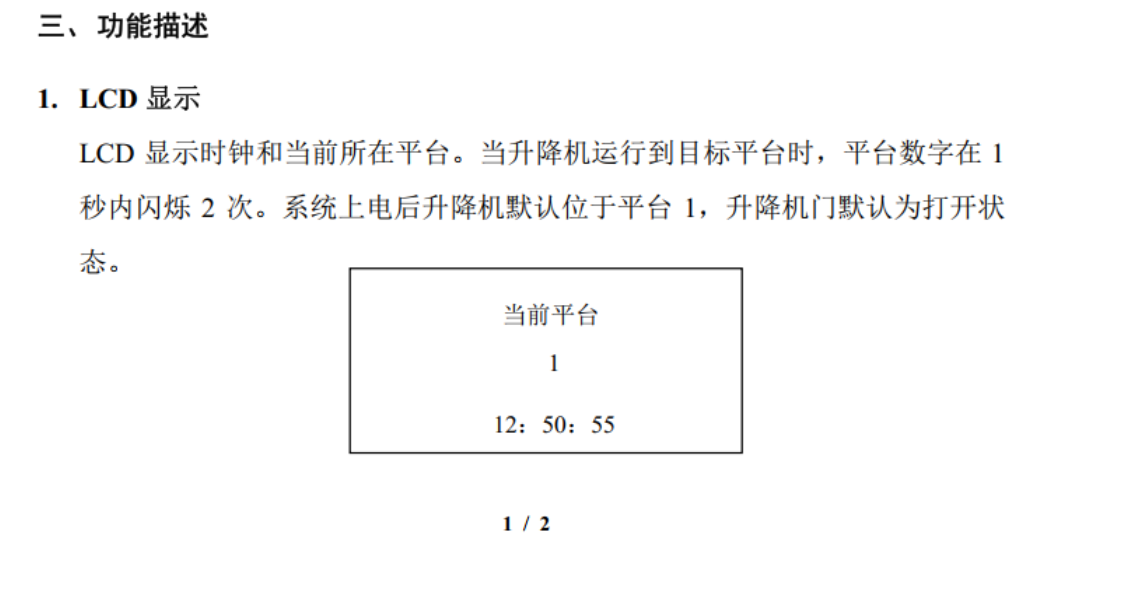
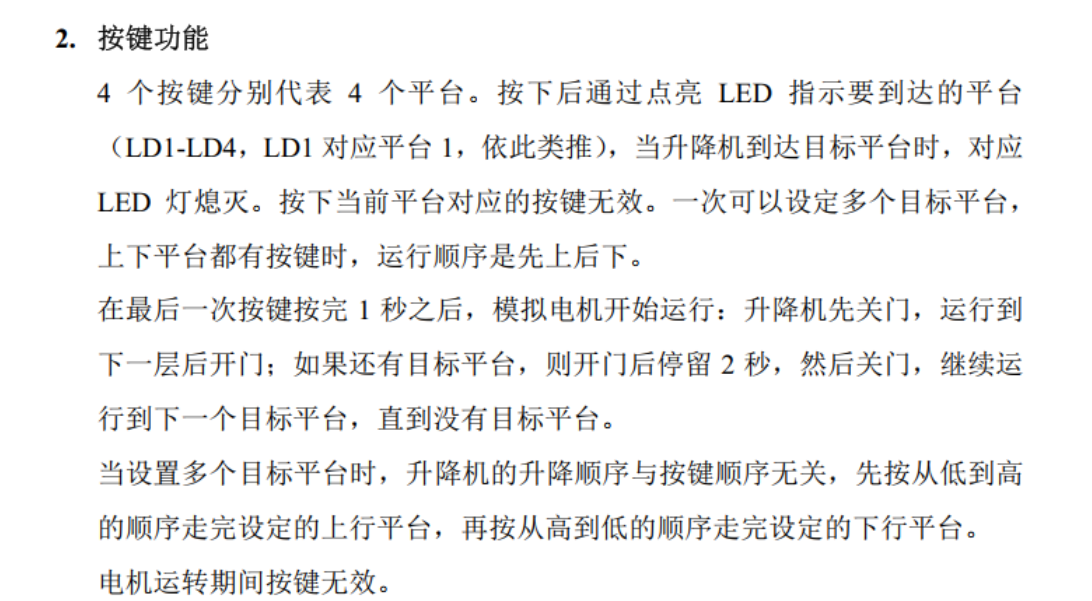
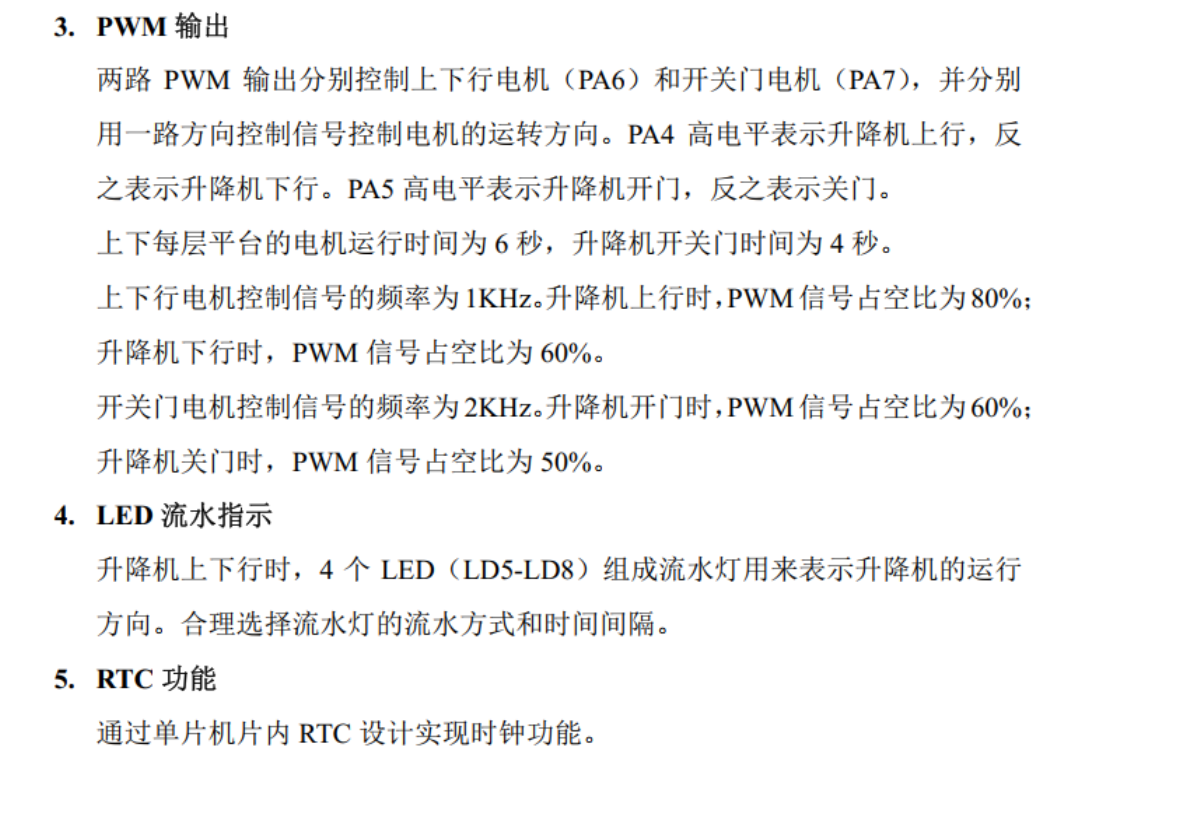
对比第六届和第七届,这届的题目在逻辑思维上确实要麻烦不少,可以从题目看出,这届题目对时间顺序的要求很严格,所以就可以使用状态机的思想来编程,拿到类似题目不要急着写代码,一定要先分析好步骤,想出状态转换的逻辑后,在根据逻辑写代码写起来就很快了。
main.c
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** <h2><center>© Copyright (c) 2021 STMicroelectronics.* All rights reserved.</center></h2>** This software component is licensed by ST under BSD 3-Clause license,* the "License"; You may not use this file except in compliance with the* License. You may obtain a copy of the License at:* opensource.org/licenses/BSD-3-Clause********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "rtc.h"
#include "tim.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "key.h"
#include "led.h"
#include "string.h"
#include "stdio.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
extern struct Key key[4];//4个按键
uint8_t lcdtext[30]; //lcd显示的内容
uint8_t status[30]; //lcd显示的内容
uint8_t led;//LED状态
uint8_t setfloor[5]={0,0,0,0,0};//四层楼,为了方便1-4所以数组大小为5
uint32_t key_time_1s; //按键按下后等待的1s
uint32_t open_or_close_door_time_4s; //开门或者关门所需时间
uint32_t up_or_down_dir_time_6s; //电梯往上一楼或者往下一楼所需的时间
uint32_t wait_time_2s; //电梯在每层楼等待时间
uint8_t current_floor = 1;//当前所在层
RTC_DateTypeDef D; //用于显示日期
RTC_TimeTypeDef T; //用于显示时间
uint8_t process_status = 0;//执行的状态
uint8_t dir = 2;//是上还是下,默认停止
//下面用于流水灯的部分
uint32_t lastUpdateTime = 0; // 上次更新LED状态的时间
const uint32_t updateInterval = 200; // 更新间隔,以毫秒为单位
uint8_t flow_led_enable = 0; //是否打开流水灯
/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
void led_process(void);
void key_process(void);
void lcd_process(void);
void status_process(void);/* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM2_Init();MX_RTC_Init();MX_TIM16_Init();MX_TIM17_Init();/* USER CODE BEGIN 2 */HAL_TIM_Base_Start_IT(&htim2);LCD_Init();/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);LED_display(0x00);sprintf((char *)lcdtext," %d",current_floor); //默认为1楼LCD_DisplayStringLine(Line3,lcdtext);while (1){led_process();lcd_process();key_process();status_process();/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};/** Configure the main internal regulator output voltage*/HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI|RCC_OSCILLATORTYPE_LSI;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;RCC_OscInitStruct.LSIState = RCC_LSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV2;RCC_OscInitStruct.PLL.PLLN = 20;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}/** Initializes the peripherals clocks*/PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_RTC;PeriphClkInit.RTCClockSelection = RCC_RTCCLKSOURCE_LSI;if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 */
void key_process(void)
{if((process_status==0||process_status==1))//没有按键按下时,和按键按下1s内还可以继续按{sprintf((char *)status," wait key ");if(key[0].key_flag&¤t_floor!=0+1) //不能是当前楼层{key[0].key_flag = 0;setfloor[1] = 1;//设置目标楼层led|=0x01; //设置对应led打开LED_display(led);//打开对应ledprocess_status = 1;//按键按下后进入1s等待状态key_time_1s = uwTick; //更新按键按下时时间}if(key[1].key_flag&¤t_floor!=1+1){key[1].key_flag = 0;setfloor[2] = 1;led|=0x02;LED_display(led);process_status = 1;key_time_1s = uwTick;}if(key[2].key_flag&¤t_floor!=2+1){key[2].key_flag = 0;setfloor[3] = 1;led|=0x04;LED_display(led);process_status = 1;key_time_1s = uwTick;}if(key[3].key_flag&¤t_floor!=3+1){key[3].key_flag = 0;setfloor[4] = 1;led|=0x08;LED_display(led);process_status = 1;key_time_1s = uwTick;}}}void lcd_process(void)
{HAL_RTC_GetDate(&hrtc,&D,RTC_FORMAT_BIN);HAL_RTC_GetTime(&hrtc,&T,RTC_FORMAT_BIN);sprintf((char *)lcdtext," FLOOR");LCD_DisplayStringLine(Line1,lcdtext);
// sprintf((char *)lcdtext," %d",current_floor);
// LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," %02d:%02d:%02d",T.Hours,T.Minutes,T.Seconds);LCD_DisplayStringLine(Line4,lcdtext);//LCD_ClearLine(Line7);sprintf((char *)lcdtext,"%s",status);LCD_DisplayStringLine(Line7,lcdtext);sprintf((char *)lcdtext," floors:%d-%d-%d-%d",setfloor[1],setfloor[2],setfloor[3],setfloor[4]);LCD_DisplayStringLine(Line8,lcdtext);
}void status_process(void)
{if(process_status){switch(process_status){case 1: //状态1:等待1s内是否有按键按下{sprintf((char *)status," wait key 1s ");if((uwTick-key_time_1s)>=1000) //如果1s到了,进入下一个关门状态{sprintf((char *)status," key_1s_yes ");process_status = 2;}}break;case 2: //状态2:开始关门{sprintf((char *)status," close door ");HAL_GPIO_WritePin(GPIOA,GPIO_PIN_5,GPIO_PIN_RESET);//关门__HAL_TIM_SET_COMPARE(&htim17,TIM_CHANNEL_1,250); //占空比50%HAL_TIM_PWM_Start(&htim17,TIM_CHANNEL_1);process_status = 3; //进入等待关门状态open_or_close_door_time_4s = uwTick;//更新关门时间}break;case 3://状态3:4s关门时间等待,关完门开始判断电梯是上行还是下行{sprintf((char *)status,"wait close door 4s ");if(uwTick-open_or_close_door_time_4s>=4000) //关门后,开始判断上下行{sprintf((char *)status,"close door yes ");int up = 0, down = 0;HAL_TIM_PWM_Stop(&htim17,TIM_CHANNEL_1);// 检查上行for(int i = current_floor + 1; i < 5; i++) { //如果电梯数组中存在比当前楼层高的楼层被设置if(setfloor[i] == 1) {up = 1;break;}}// 检查下行for(int i = current_floor - 1; i >= 1; i--) { //如果电梯数组中存在比当前楼层低的楼层被设置if(setfloor[i] == 1) {down = 1;break;}}// 判断方向if(up && !down) { //只有往上dir = 1;} else if(down && !up) { //只有往下dir = 0;} else if(up && down) { //上下都有,先向上dir = 1;} else {dir = 2; //都没有}sprintf((char *)status," move ");sprintf((char *)lcdtext," dir:%d--%d",up,down);LCD_DisplayStringLine(Line9,lcdtext);if(dir==1)//上行{flow_led_enable = 1;HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_SET);__HAL_TIM_SET_COMPARE(&htim16,TIM_CHANNEL_1,800); //占空比80%HAL_TIM_PWM_Start(&htim16,TIM_CHANNEL_1);up_or_down_dir_time_6s = uwTick;//更新上行时间process_status = 4;}else if(dir==0)//下行{flow_led_enable = 1;HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_RESET);__HAL_TIM_SET_COMPARE(&htim16,TIM_CHANNEL_1,600); //占空比80%HAL_TIM_PWM_Start(&htim16,TIM_CHANNEL_1);up_or_down_dir_time_6s = uwTick;//更新上行时间process_status = 4;}else if(dir==2)//既不需要上行也不需要下行,回到电梯状态{process_status = 0;}}}break;case 4://状态4:等待6s上下行时间{sprintf((char *)status," wait move 6s ");if(uwTick-up_or_down_dir_time_6s>=6000) //上下行时间到了{sprintf((char *)status," move yes ");if(dir==1) //如果是上行{current_floor+=1;}else{current_floor-=1;}HAL_TIM_PWM_Stop(&htim16,TIM_CHANNEL_1);//setfloor[current_floor] = 0;//已到达该层// 显示楼层号并闪烁两次for(int i = 0; i < 2; i++) // 闪烁两次{sprintf((char *)lcdtext," %d",current_floor);LCD_DisplayStringLine(Line3, lcdtext); // 显示楼层号HAL_Delay(500); // 延时500msLCD_ClearLine(Line3); // 清除楼层号显示HAL_Delay(500); // 延时500ms}// 再次显示楼层号sprintf((char *)lcdtext," %d",current_floor);LCD_DisplayStringLine(Line3, lcdtext);switch(current_floor){case 1:{led &= ~0x01; // 使用位清除操作关闭LED1}break;case 2:{led &= ~0x02; // 关闭LED2}break;case 3:{led &= ~0x04; // 关闭LED3}break;case 4:{led &= ~0x08; // 关闭LED4}break;}LED_display(led); // 更新LED显示flow_led_enable = 0; // 关闭流水灯led &= 0x0F; // 保持低四位状态不变,关闭高四位LEDLED_display(led); // 更新LED显示open_or_close_door_time_4s = uwTick;//更新开门时间process_status =5;}}break;case 5 ://状态5:等待开门4s时间到{sprintf((char *)status," wait open door 4s ");if(uwTick-open_or_close_door_time_4s>=4000)//打开门{sprintf((char *)status," open door yes ");wait_time_2s = uwTick;//更新等待时间process_status = 6;}}break;case 6 ://状态5:等待开门4s时间到{sprintf((char *)status," wait 2s ");if(uwTick-wait_time_2s>=2000)//每层停留时间{sprintf((char *)status," wait 2s yes ");wait_time_2s = uwTick;//更新等待时间process_status = 2;}}break;}}}void led_process(void)
{static uint8_t flow_led_state = 0; // 初始状态为0,表示流水灯未激活if((uwTick - lastUpdateTime) >= updateInterval && flow_led_enable){lastUpdateTime = uwTick; // 更新最后一次更新时间if(flow_led_state == 0) // 如果流水灯未激活,根据方向初始化流水灯状态{flow_led_state = (dir == 1) ? 0x08 : 0x01; // 从左侧或右侧开始}else{if(dir == 1) // 上行:从右到左流水{flow_led_state <<= 1; // 向左移动if(flow_led_state > 0x08) // 如果超过了最左侧,重置到最右侧{flow_led_state = 0x01;}}else if(dir == 0) // 下行:从左到右流水{flow_led_state >>= 1; // 向右移动if(flow_led_state < 0x01) // 如果超过了最右侧,重置到最左侧{flow_led_state = 0x08;}}}// 更新LED状态,仅修改高四位,保持低四位不变// 注意:这里假设flow_led_state只影响一个LED,需要根据实际情况调整led = (led & 0x0F) | (flow_led_state << 4); // 将流水灯状态左移4位,合并到led的高四位LED_display(led); // 更新LED显示}
}/* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state *//* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT *//************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/key.c
#include "key.h"struct Key key[4] = {0,0,0,0};extern uint8_t process_status;
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if(htim->Instance==TIM2){if((process_status==0||process_status==1)){key[0].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);key[1].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);key[2].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);key[3].key_gpio = HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);for(int i = 0;i<4;i++){switch(key[i].key_index){case 0:{if(key[i].key_gpio==0){key[i].key_index=1;}}break;case 1:{if(key[i].key_gpio==0){key[i].key_flag =1;key[i].key_index=2;}else{key[i].key_index=0;}}break;case 2:{if(key[i].key_gpio==1){key[i].key_index=0;}}break;}}}}}我一共将这个题目分为了6个状态
- 状态0
此状态用于等待按键按下以设置目标楼层,只要右按键按下,就将对应的楼层数组置1,打开对应的led,记录当前按键按下的时间,最后进入状态1
- 状态1:
此状态的进入是由于存在按键被按下,设置了目标楼层,该状态一直等待1s的到来,在状态0和状态1状态下按键仍然可以按下,因为某个按键按下后,在1s内仍然可以设置目标楼层,每一次重新按下按键,倒计时都会刷新,同样为了防止其余状态下按键仍然可以按下导致flag置1,在key.c的定时器回调函数中也只有状态0和状态1才能判断按键是否按下
- 状态2:
此状态为开始关门状态,根据题目要求,将PA5置低电平,同时设置TIM17通道1的占空比为50% ,更新关门时间,进入状态3
- 状态3:
题目要求开关门都需要4s,所以此状态为等待关门状态,等待结束后,开始根据setfloor数组确定当前电梯是向上,还是向下,设置的楼层会导致4种状态
- 只有比当前楼层高的楼层被设置,dir=1,往上走
- 只有比当前楼层低的楼层被设置,dir=0,往下走
- 比当前楼层高的和低的都设置,例如当前楼层是2层,比2层低的1层和比2层高的3,4层都被设置,dir=1,同样先向上走,再往下走
- 默认状态都没有被设置,在按键时已经限制条件不能设置当前楼层,dir=2,保持在当前楼层
根据dir的取值,设置上行还是下行,并打开对应PWM输出和电平信号,更新电梯开始上下行时间,或者是就在当前层然后,回到状态0,等待设置目标楼层
- 状态4:
题目要求上行或者下行都需要6s,该状态是为了等待6s到来,时间到来后,根据dir将当前楼层+1或者-1,同时当前楼层闪烁两次,关闭当前楼层对应的led灯,关闭流水灯,然后更新开始开门时间,进入状态5
- 状态5:
等待开门时间4s,时间到达后,更新每层停留的2s时间,进入下一个状态,状态6
- 状态6:
每层的等待时间2s,等待完后回到,状态2开始关门,继续按顺序执行,直到没有目标楼层,回到状态0等待按键按下。
led.c
#include "led.h"void LED_display(uint8_t led)
{HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOC,led<<8,GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}led_process用于处理流水灯,根据电梯运行方向确定,流水灯方向,led = (led & 0x0F) | (flow_led_state << 4); 这句的意思是首先保持低四位的保持不变,然后将流水灯的状态左移4位,与之相或从而实现不影响低四位led的效果
为了便于观察状态,添加了一些表示状态的信息显示在lcd上,时间控制大部分使用滴答定时器uwTick以防止delay阻塞程序
相关文章:
蓝桥杯嵌入式第8届真题(完成) STM32G431
蓝桥杯嵌入式第8届真题(完成) STM32G431 题目 分析和代码 对比第六届和第七届,这届的题目在逻辑思维上确实要麻烦不少,可以从题目看出,这届题目对时间顺序的要求很严格,所以就可以使用状态机的思想来编程,拿到类似题…...
第二节 zookeeper基础应用与实战
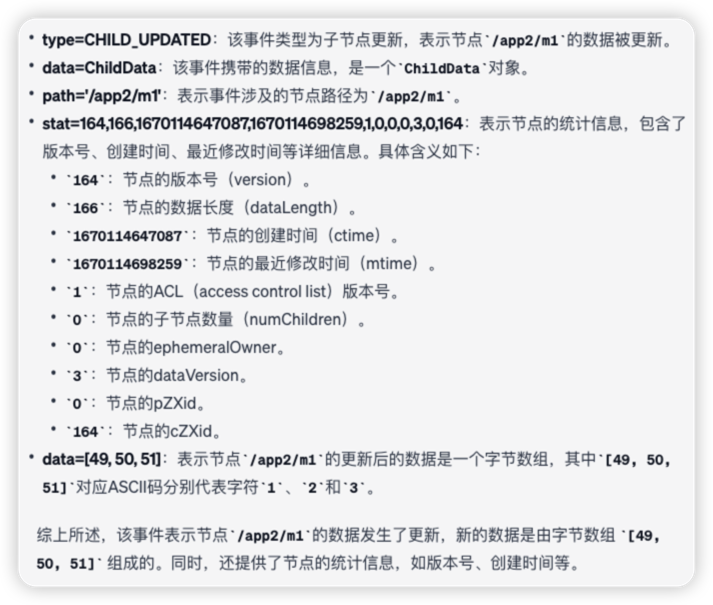
目录 1. Zookeeper命令操作 1.1 Zookeeper 数据模型 1.2 Zookeeper服务端常用命令 1.3 Zookeeper客户端常用命令 1.3.1 基本CRUD 1.3.2 创建临时&顺序节点 2. Zookeeper JavaAPI操作 2.1 Curator介绍 2.2 引入Curator 2.3 建立连接 2.4 添加节点 2.5 修改节点 …...
改变AI服务器:探索界面互连芯片技术的创新突破
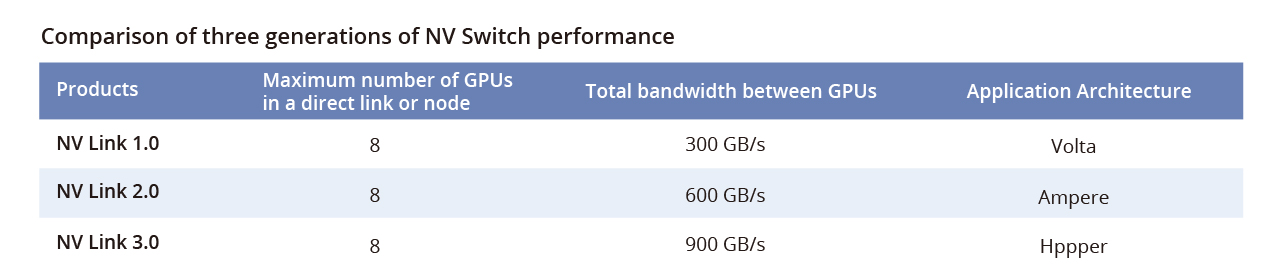
根据TrendForce的数据,AI服务器的出货量约为130,000台,占全球服务器总出货量的约1%。随着微软、Meta、百度和字节跳动等主要制造商相继推出基于生成式AI的产品和服务,订单量显著增加。预测显示,在ChatGPT等应用的持续需求推动下&a…...

【P1506 拯救oibh总部】
拯救oibh总部 题目背景 oibh 总部突然被水淹没了!现在需要你的救援…… 题目描述 oibh 被突来的洪水淹没了,还好 oibh 总部有在某些重要的地方起一些围墙。用 * 号表示,而一个四面被围墙围住的区域洪水是进不去的。 oibh 总部内部也有许…...

应用层 HTTP协议(1)
回顾 前面我们说到了数据链路层,网络层IP协议,传输层的TCP/UDP协议一些知识点,现在让我们谈谈 应用层的HTTP协议的知识点. 这篇我们先从大局入手,仍然是对总体报文进行全局分析,再对细节报文进行拆解分析 版本 首先我们谈谈HTTP协议的版本 HTTP 0.9 (1991) HTTP 1.0 (1992 - 1…...
Linux学习笔记(centOS)—— 文件系统
目录 一、Linux中的文件 打开方式 二、目录结构 三、相关命令 切换目录命令 列出当前目录下的文件和目录命令 一、Linux中的文件 “万物皆文件。” 图1.1 所有文件 打开方式 图形化界面左上角的位置→计算机,打开以后就可以看到Linux全部的文件了…...
华视 CVR-100UC 身份证读取 html二次开发模板
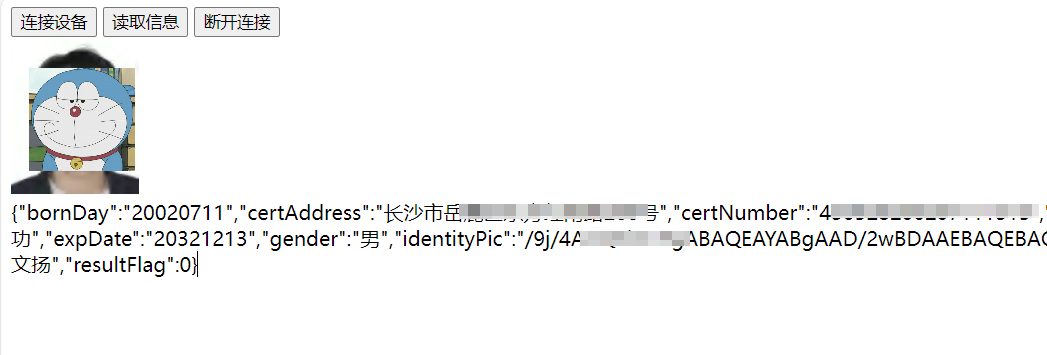
python读卡:python读卡 最近小唐应要求要开发一个前端的身份证读卡界面,结果华视CVR-100UC 的读取界面是在是有点,而且怎么调试连官方最基本的启动程序都执行不了。CertReader.ocx 已成功,后面在问询一系列前辈之后,大…...
ubuntu彻底卸载cuda 重新安装cuda
sudo apt-get --purge remove "*cublas*" "*cufft*" "*curand*" \"*cusolver*" "*cusparse*" "*npp*" "*nvjpeg*" "cuda*" "nsight*" cuda10以上 cd /usr/local/cuda-xx.x/bin/ s…...

【Java】学习笔记:关于java.sql;
Connection conn null; Connection:这是一个 Java 接口,表示与数据库的连接。在这里,conn 是一个 Connection 类型的变量。 conn:这是变量的名称,可以根据需要进行更改。通常,conn 被用作表示数据库连接的…...
python web 框架Django学习笔记
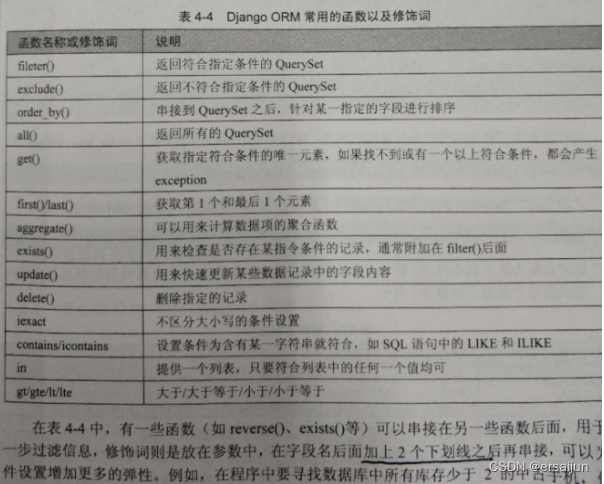
2018年5月 python web 框架Django学习笔记 Django 架站的16堂课 MVC架构设计师大部分框架或大型程序项目中一种软件工程的架构模式,把程序或者项目分为三个主要组成部分,Model数据模型、View视图、Controller控制器。 命令及设置相关 创建数据库及中间…...

ubuntn20 搭建 redmine
安装数据库 更新包列表:sudo apt update 安装MySQL服务器:sudo apt install mysql-server 运行安全性脚本:MySQL服务器安装后,运行以下命令以加固安装:sudo mysql_secure_installation 这个脚本将引导您完成几个安全选…...

每日五道java面试题之java基础篇(三)
第一题. switch 是否能作⽤在 byte/long/String 上? Java5 以前 switch(expr)中,expr 只能是 byte、short、char、int。从 Java 5 开始,Java 中引⼊了枚举类型, expr 也可以是 enum 类型。从 Java 7 开始,expr 还可以…...

如何升级 gpt4?快速升级至ChatGPT Plus指南,爆火的“ChatGPT”到底是什么?
提到 ChatGPT。想必大家都有所耳闻。自从 2022 年上线以来,就受到国内外狂热的追捧和青睐,上线2个月,月活突破1个亿!!! 而且还在持续上涨中。因为有很多人都在使用 ChatGPT 。无论是各大头条、抖音等 App、…...
【实习】深信服防火墙网络安全生产实习
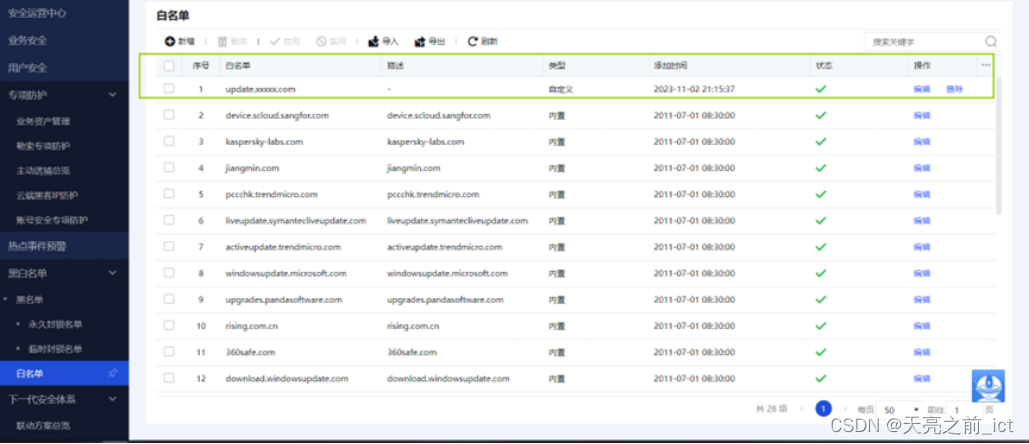
一、实习概况 1.1实习目的 1.掌握防火墙规则的作用2.掌握代理上网功能的作用3.掌握端口映射功能的作用 1.2实习任务 1.防火墙的WEB控制台 2.需要在防火墙上配置dnat …...

怎么把视频音乐提取成mp3?分享详细工具和方法!
在数字媒体时代,音乐已经成为我们生活中不可或缺的一部分。有时候,我们会在社交媒体、视频分享网站或在线视频平台上看到一些非常喜欢的视频音乐,想要将其保存为MP3格式以便随时随地聆听。那么,如何从视频中提取音乐并转换为MP3格…...
代码随想录算法训练营第44天 | 完全背包理论基础 518.零钱兑换II 377.组合总和 Ⅳ
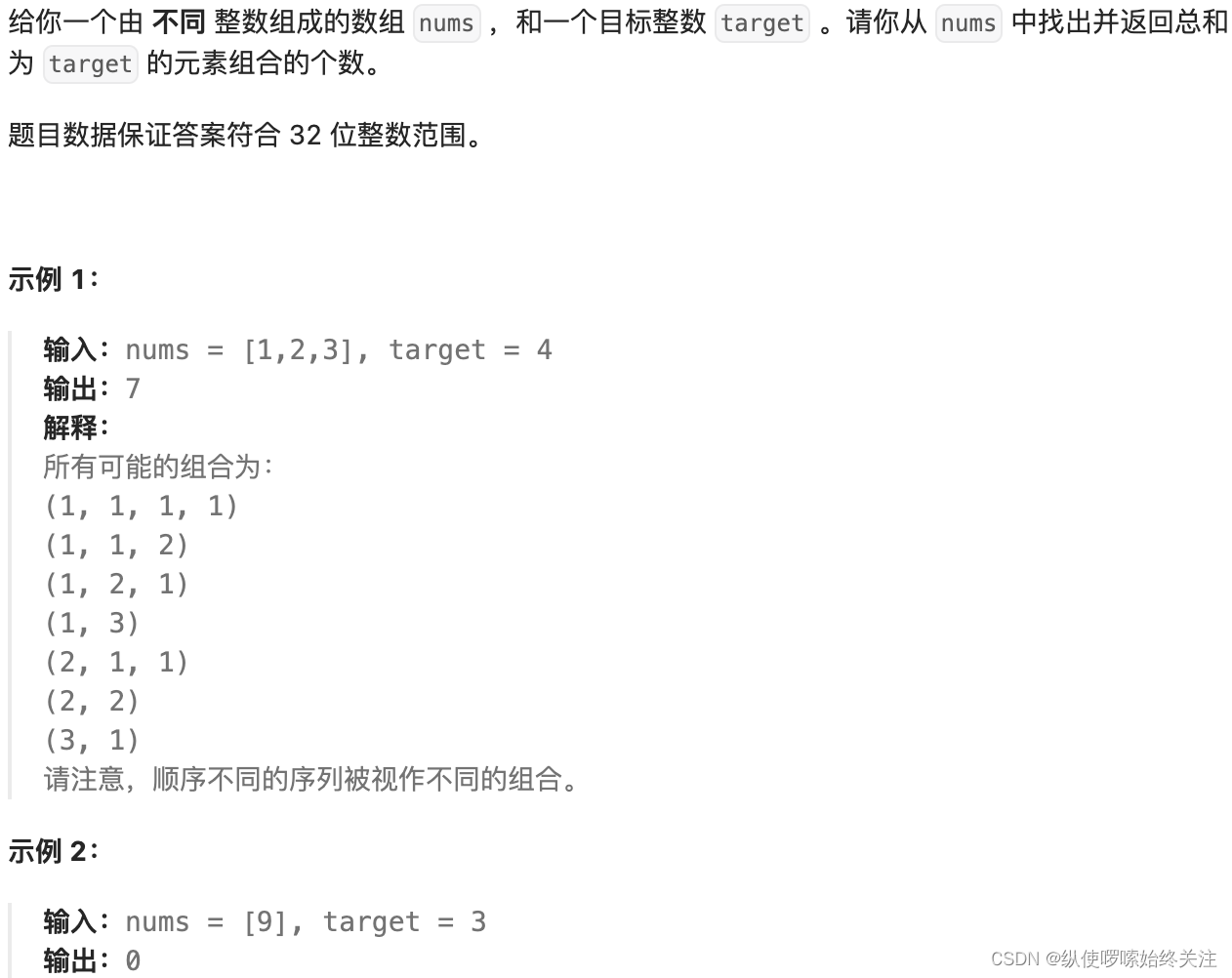
完全背包理论基础 完全背包与01背包只相差在物品是无限取用的。因此和01背包相比第二层对背包容量的遍历应该是正序的,而且正因为这个正序,使得在纯完全背包问题中,背包容量和物品的遍历是可以倒过来的。 #include <bits/stdc.h> usi…...

深度解析与推荐:主流Web前端开发框架
一、引言 在信息化社会中,Web前端开发的重要性日益凸显。作为连接用户与后台服务的关键桥梁,前端界面不仅直接影响用户体验,更是企业品牌形象、产品价值传递的重要载体。随着互联网技术的飞速发展,用户对于网站和应用的交互性、响应速度以及视觉效果等方面的要求越来越高,…...

【React】如何使antd禁用状态的表单输入组件响应点击事件?
最近遇到一个需求,需要在<Input.textarea>组件中,设置属性disabled为true,使textarea响应点击事件,但直接绑定onClick并不会在禁用状态下被响应。 解决方法1 之后尝试了很多方法,比如设置csspointer-events:no…...

Apache Flink
前言 最近在学习室内融合定位服务架构,业务架构上,涵盖了数据采集、处理、状态管理、实时计算和告警等多个方面,但有些问题:这套系统中包含了大量的有状态计算,目前是通过自设计内存对象进行管理,并利用Re…...

SpringMVC速成(一)
文章目录 SpringMVC速成(一)1.SpringMVC概述2.SpringMVC入门案例2.1 需求分析2.2 案例制作步骤1:创建Maven项目步骤2:补全目录结构步骤3:导入jar包步骤4:创建配置类步骤5:创建Controller类步骤6:使用配置类替换web.xml步骤7:配置Tomcat环境步骤8:启动运行…...

Python爬虫实战:研究MechanicalSoup库相关技术
一、MechanicalSoup 库概述 1.1 库简介 MechanicalSoup 是一个 Python 库,专为自动化交互网站而设计。它结合了 requests 的 HTTP 请求能力和 BeautifulSoup 的 HTML 解析能力,提供了直观的 API,让我们可以像人类用户一样浏览网页、填写表单和提交请求。 1.2 主要功能特点…...
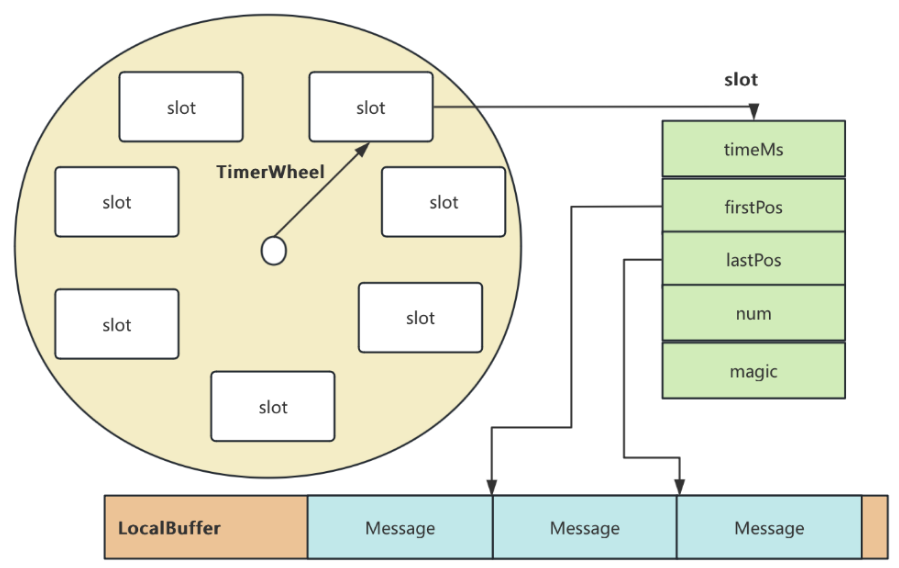
RocketMQ延迟消息机制
两种延迟消息 RocketMQ中提供了两种延迟消息机制 指定固定的延迟级别 通过在Message中设定一个MessageDelayLevel参数,对应18个预设的延迟级别指定时间点的延迟级别 通过在Message中设定一个DeliverTimeMS指定一个Long类型表示的具体时间点。到了时间点后…...
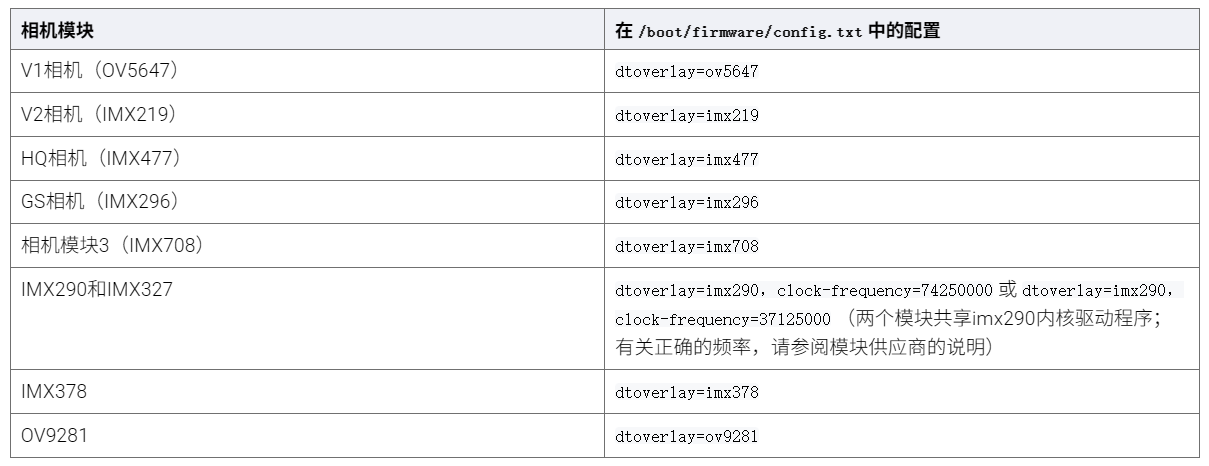
树莓派超全系列教程文档--(61)树莓派摄像头高级使用方法
树莓派摄像头高级使用方法 配置通过调谐文件来调整相机行为 使用多个摄像头安装 libcam 和 rpicam-apps依赖关系开发包 文章来源: http://raspberry.dns8844.cn/documentation 原文网址 配置 大多数用例自动工作,无需更改相机配置。但是,一…...
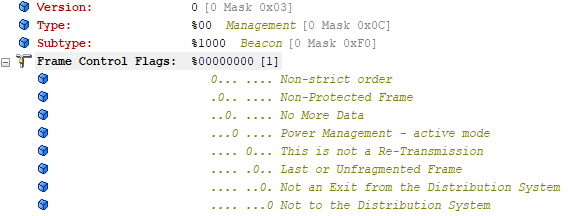
【WiFi帧结构】
文章目录 帧结构MAC头部管理帧 帧结构 Wi-Fi的帧分为三部分组成:MAC头部frame bodyFCS,其中MAC是固定格式的,frame body是可变长度。 MAC头部有frame control,duration,address1,address2,addre…...
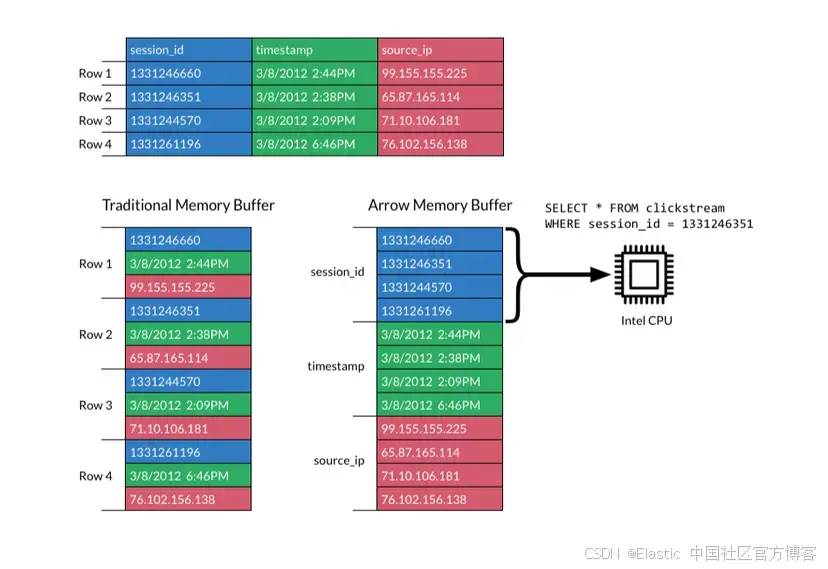
JavaScript 中的 ES|QL:利用 Apache Arrow 工具
作者:来自 Elastic Jeffrey Rengifo 学习如何将 ES|QL 与 JavaScript 的 Apache Arrow 客户端工具一起使用。 想获得 Elastic 认证吗?了解下一期 Elasticsearch Engineer 培训的时间吧! Elasticsearch 拥有众多新功能,助你为自己…...

MODBUS TCP转CANopen 技术赋能高效协同作业
在现代工业自动化领域,MODBUS TCP和CANopen两种通讯协议因其稳定性和高效性被广泛应用于各种设备和系统中。而随着科技的不断进步,这两种通讯协议也正在被逐步融合,形成了一种新型的通讯方式——开疆智能MODBUS TCP转CANopen网关KJ-TCPC-CANP…...
)
WEB3全栈开发——面试专业技能点P2智能合约开发(Solidity)
一、Solidity合约开发 下面是 Solidity 合约开发 的概念、代码示例及讲解,适合用作学习或写简历项目背景说明。 🧠 一、概念简介:Solidity 合约开发 Solidity 是一种专门为 以太坊(Ethereum)平台编写智能合约的高级编…...
)
Typeerror: cannot read properties of undefined (reading ‘XXX‘)
最近需要在离线机器上运行软件,所以得把软件用docker打包起来,大部分功能都没问题,出了一个奇怪的事情。同样的代码,在本机上用vscode可以运行起来,但是打包之后在docker里出现了问题。使用的是dialog组件,…...
基于SpringBoot在线拍卖系统的设计和实现
摘 要 随着社会的发展,社会的各行各业都在利用信息化时代的优势。计算机的优势和普及使得各种信息系统的开发成为必需。 在线拍卖系统,主要的模块包括管理员;首页、个人中心、用户管理、商品类型管理、拍卖商品管理、历史竞拍管理、竞拍订单…...
Windows安装Miniconda
一、下载 https://www.anaconda.com/download/success 二、安装 三、配置镜像源 Anaconda/Miniconda pip 配置清华镜像源_anaconda配置清华源-CSDN博客 四、常用操作命令 Anaconda/Miniconda 基本操作命令_miniconda创建环境命令-CSDN博客...