DVXplorer事件相机入门
DV官方文档:Get Started · DV (inivation.gitlab.io)
DV事件相机的ROS包:https://github.com/uzh-rpg/rpg_dvs_ros
事件相机的资源汇总:https://github.com/uzh-rpg/event-based_vision_resources
1.DV事件相机ROS包驱动程序安装
注意:将以下指令中提及的任何noetic替换为您当前ROS发行版的名称
- 安装ROS依赖
sudo apt-get install ros-noetic-camera-info-manager
sudo apt-get install ros-noetic-image-view
- 安装libcaer
sudo apt-get install libcaer-dev
- 安装catkin工具
sudo apt-get install python-catkin-tools
- 创建工作空间(指令参考:ROS指令大全)
cd ~
mkdir -p catkin_ws/src
cd catkin_ws
catkin config --init --mkdirs --extend /opt/ros/noetic --merge-devel --cmake-args -DCMAKE_BUILD_TYPE=Release
- 克隆将用于生成 DVS/DAVIS 驱动程序包的包 (https://github.com/catkin/catkin_simple):
catkin_simple
cd ~/catkin_ws/src
git clone https://github.com/catkin/catkin_simple.git
git clone https://github.com/uzh-rpg/rpg_dvs_ros.git
- 编译包
cd ~/catkin_ws
catkin_make # 编译工作区内的所有功能包
# 或者选择性的编译下面的功能包
catkin build dvs_renderer # 渲染器(图片查看器)
catkin build dvs_ros_driver # DVS128
catkin build davis_ros_driver # DAVIS
catkin build dvxplorer_ros_driver # DVXplorer
- 更新环境
source ~/catkin_ws/devel/setup.bash
2.测试DV相机
连接DV相机并通过启动下面的launch来启动DV相机
roslaunch dvs_renderer dvs_mono.launch # DVS128
roslaunch dvs_renderer davis_mono.launch # DAVIS
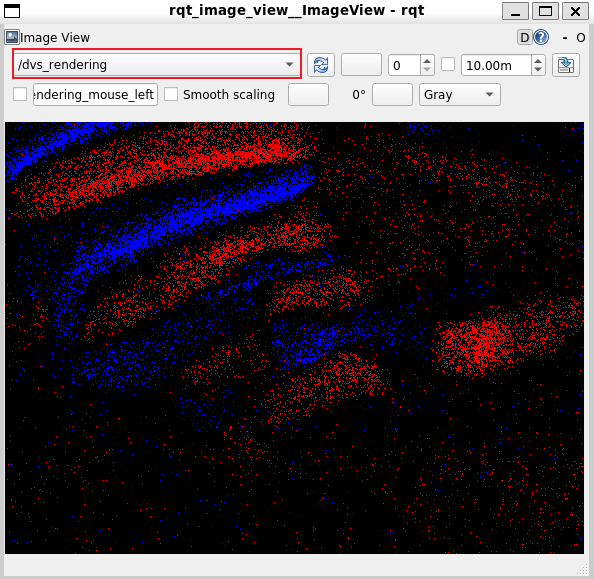
roslaunch dvs_renderer dvxplorer_mono.launch # DVXplorer
我使用的是DVXplorer相机,主题切换到/dvs_rendering,并在镜头前晃动即可显示下面的画面
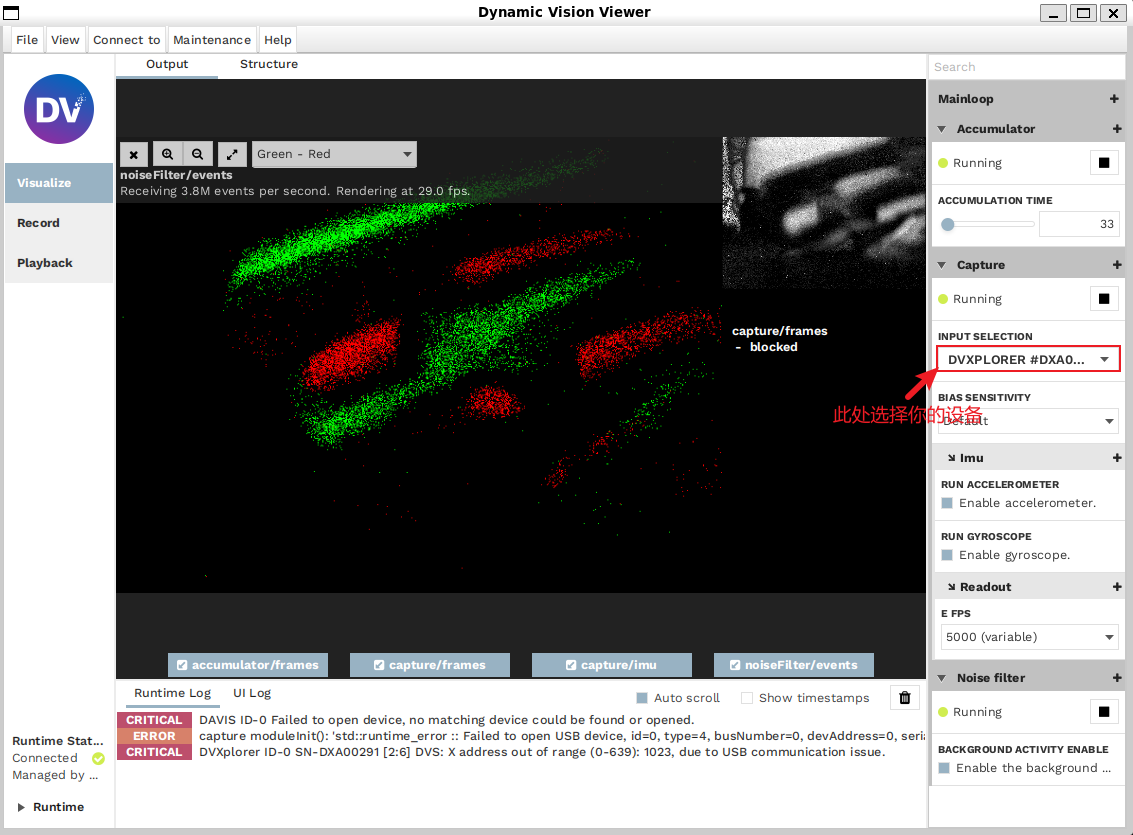
3.使用DV-GUI来启动DV相机(可选)
DV-GUI是用于 iniVation 动态视觉传感器 (DVS/DAVIS) 的软件,可以通过连接到DV相机并显示其输出。它也是官方软件开发工具包,用于为基于事件的相机编写应用软件。目前支持的操作系统有Win、Macos、Ubuntu、Fedora、Arch linux、树莓派等
-
Windows- 下载并安装DV:【点击下载】
- Windows下DV软件有bug,需要修改系统显示语言为English,这步一定要弄,不然无法正常使用:在 Windows 中管理显示语言设置 - Microsoft 支持
-
Ubuntu
我们在x86_64、arm64和armhf架构上为Focal (20.04 LTS) 和Jammy (22.04 LTS)提供了一个 PPA 存储库。请注意,
dv-gui仅在 x86_64上可用,dv-runtime在所有支持的架构上可用。
sudo add-apt-repository ppa:inivation-ppa/inivation
sudo apt-get update
sudo apt-get install dv-gui
使用dv-gui指令来启动软件
注:如果设备无法识别,或者无法查找,请确保DV相机是否正常运行并连接到电脑上,尝试拔插USB来重启DV相机;如果你在WSL中使用
DV-GUI,请确保USB设备能够在WSL中正常识别,WSL中添加USB设备参考教程:wsl连接USB设备
相关文章:

DVXplorer事件相机入门
DV官方文档:Get Started DV (inivation.gitlab.io) DV事件相机的ROS包:https://github.com/uzh-rpg/rpg_dvs_ros 事件相机的资源汇总:https://github.com/uzh-rpg/event-based_vision_resources 1.DV事件相机ROS包驱动程序安装 注意&#x…...
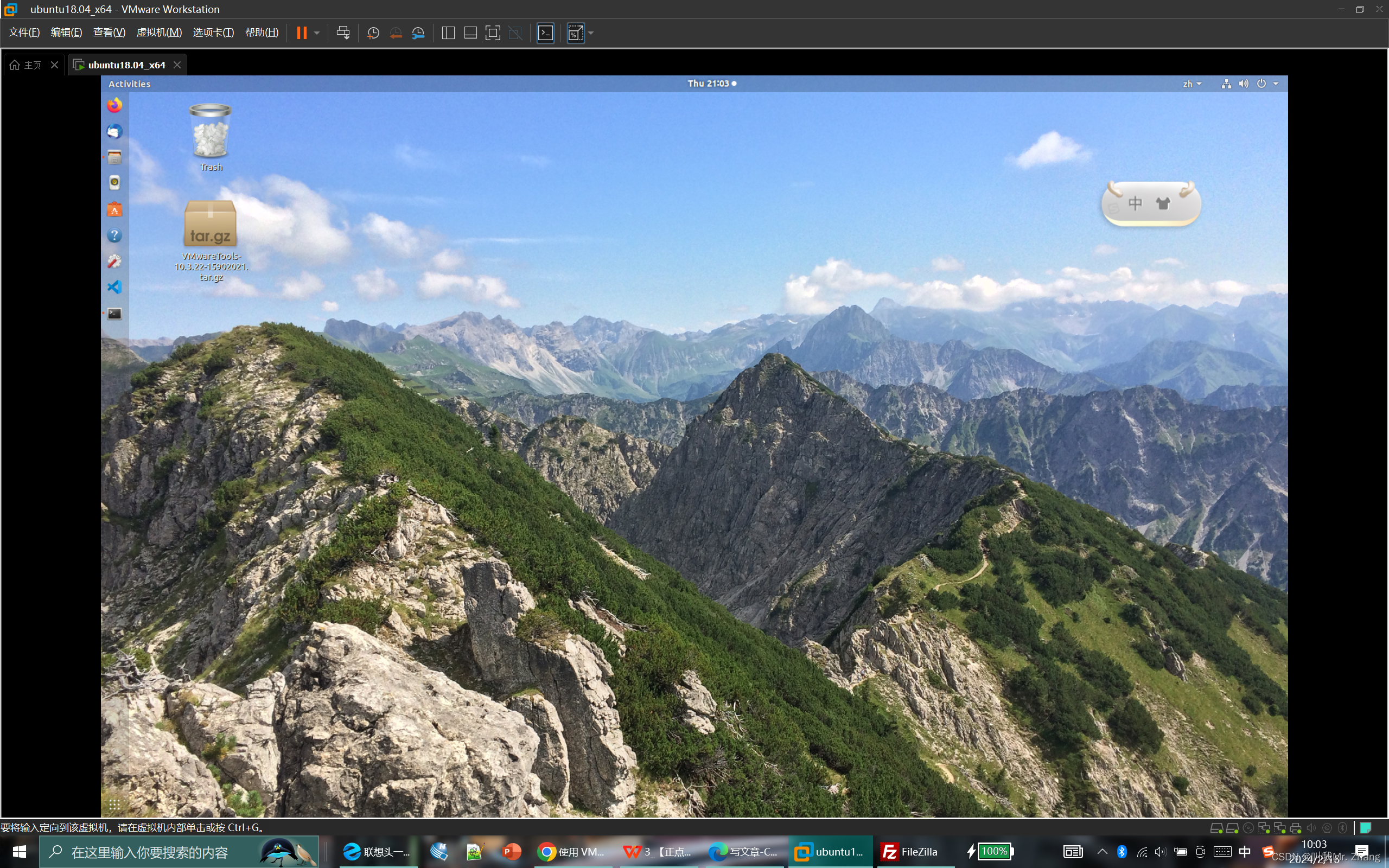
ubuntu屏幕小的解决办法
1. 安装vmware tools , 再点自适应客户机 执行里面的vmware-install.pl这个文件 :sudo ./vmware-install.pl 执行不了可以放到家目录,我放在了/home/book 里面 最后点这个自适应客户机 然后我这里点不了是因为我点了控制台视图和拉伸客户机,…...

黑群晖一键修复:root、AME、DTS、转码、CPU型号等
食用方法:SSH连接群晖使用临时root权限执行 AME3.x激活补丁 只适用于x86_64的:DSM7.x Advanced Media Extensions (AME)版本3.0.1-2004、3.1.0-3005 激活过程需要下载官方的解码包,过程较慢,耐心等待。。。 DSM7.1和7.2的AME版…...

Repo命令使用实例(三十八)
简介: CSDN博客专家,专注Android/Linux系统,分享多mic语音方案、音视频、编解码等技术,与大家一起成长! 优质专栏:Audio工程师进阶系列【原创干货持续更新中……】🚀 优质专栏:多媒…...
)
2024年华为OD机试真题-分披萨-Python-OD统一考试(C卷)
题目描述: “吃货”和“馋嘴”两人到披萨店点了一份铁盘(圆形)披萨,并嘱咐店员将披萨按放射状切成大小相同的偶数扇形小块。但是粗心服务员将披萨切成了每块大小都完全不同奇数块,且肉眼能分辨出大小。 由于两人都想吃到最多的披萨,他们商量了一个他们认为公平的分法:从…...

找负环(图论基础)
文章目录 负环spfa找负环方法一方法二实际效果 负环 环内路径上的权值和为负。 spfa找负环 两种基本的方法 统计每一个点的入队次数,如果一个点入队了n次,则说明存在负环统计当前每个点中的最短路中所包含的边数,如果当前某个点的最短路所…...

无人机飞控算法原理基础研究,多旋翼无人机的飞行控制算法理论详解,无人机飞控软件架构设计
多旋翼无人机的飞行控制算法主要涉及到自动控制器、捷联式惯性导航系统、卡尔曼滤波算法和飞行控制PID算法等部分。 自动控制器是无人机飞行控制的核心部分,它负责接收来自无人机传感器和其他系统的信息,并根据预设的算法和逻辑,对无人机的姿…...
关于内存相关的梳理
1 关键字 总结 (lowmemory,anr in) 2 知识储备 虚拟机原理 垃圾回收算法 又包含标记 和清除两种算法 标记:程序计数器-已过时,可达性分析 具体可见 http://help.eclipse.org/luna/index.jsp?topic%2Forg.ec…...
7.JS里表达式,if条件判断,三元运算符,switch语句,断点调试
表达式和语句的区别 表达式就是可以被求值的代码比如什么a 1 语句就是一段可以执行的代码比如什么if else 直接给B站的黑马程序员的老师引流一波总结的真好 分支语句 就是基本上所有的语言都会有的if else 语句就是满足不同的条件执行不同的代码,让计算机有条件…...
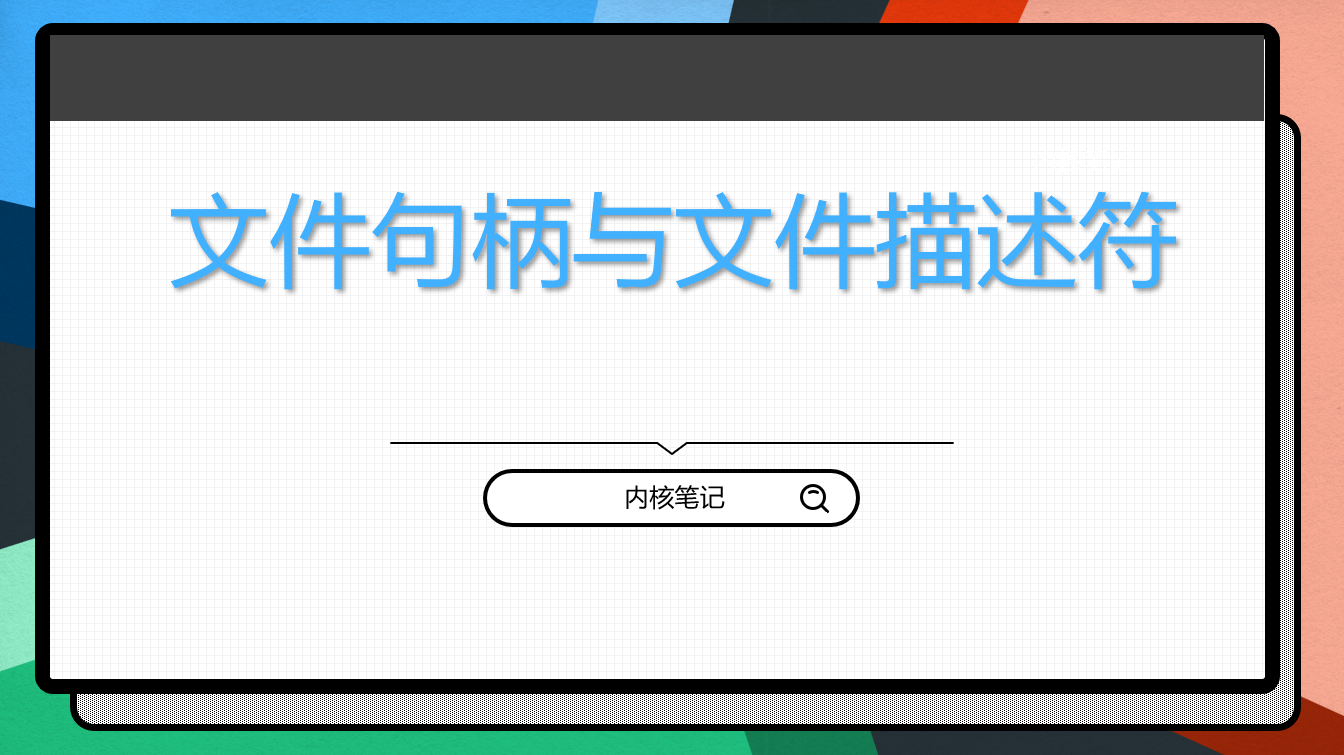
RK3568平台开发系列讲解(存储篇)文件句柄与文件描述符介绍
🚀返回专栏总目录 文章目录 一、什么是文件句柄二、什么是文件描述符2.1、files_struct 结构体2.2、fdtable 结构体三、数据结构关系图沉淀、分享、成长,让自己和他人都能有所收获!😄 一、什么是文件句柄 用户空间的进程通过open系统调用打开一个文件之后,内核返回的就是…...

【C++】类和对象(五)友元、内部类、匿名对象
前言:前面我们说到类和对象是一个十分漫长的荆棘地,今天我们将走到终点,也就是说我们对于C算是正式的入门了。 💖 博主CSDN主页:卫卫卫的个人主页 💞 👉 专栏分类:高质量C学习 &…...
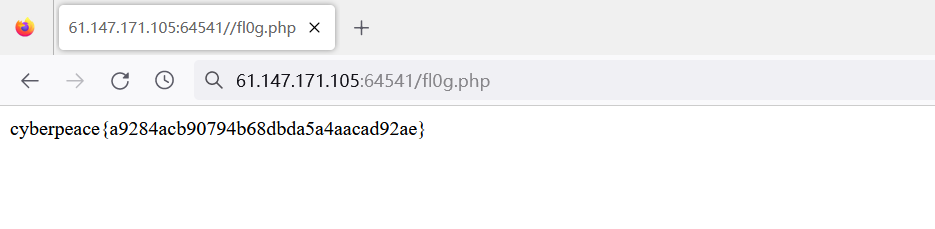
攻防世界 CTF Web方向 引导模式-难度1 —— 1-10题 wp精讲
目录 view_source robots backup cookie disabled_button get_post weak_auth simple_php Training-WWW-Robots view_source 题目描述: X老师让小宁同学查看一个网页的源代码,但小宁同学发现鼠标右键好像不管用了。 不能按右键,按F12 robots …...

Docker之MongoDB安装、创建用户及登录认证
Docker之MongoDB安装、创建用户及登录认证 文章目录 Docker之MongoDB安装、创建用户及登录认证1. 拉取镜像2. 创建宿主机容器数据卷3. 运行mongodb容器1. 运行容器2. 创建用户3. 创建数据库并设置密码 1. 拉取镜像 docker pull mongo:4.2.212. 创建宿主机容器数据卷 运行docke…...
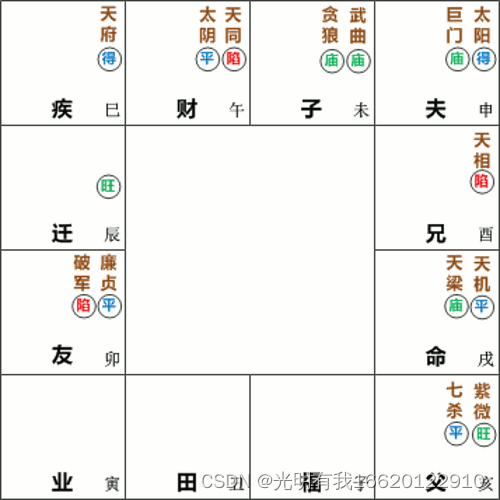
紫微斗数双星组合:天机天梁在辰戌
文章目录 前言内容总结 前言 紫微斗数双星组合:天机天梁在辰戌 内容 紫微斗数双星组合:天机天梁在辰戌 性格分析 在紫微斗数命盘中,天梁星是一颗“荫星”,能够遇难呈祥,化解凶危,主寿,主贵。…...

N-144基于微信小程序在线订餐系统
开发工具:IDEA、微信小程序 服务器:Tomcat9.0, jdk1.8 项目构建:maven 数据库:mysql5.7 前端技术:vue、ElementUI、 Vant Weapp 服务端技术:springbootmybatisredis 本系统分微信小程序和…...

[UI5 常用控件] 09.IconTabBar,IconTabHeader,TabContainer
文章目录 前言1. IconTabBar1.1 简介1.2 基本结构1.3 用法1.3.1 颜色,拖放,溢出1.3.2 Icons Only , Inner Contents1.3.3 showAll,Count,key,IconTabSeparator 1.3.4 Only Text1.3.5 headerMode-Inline1.3.6 design,IconTabSeparator-icon1.3.7 DensityM…...

CCF编程能力等级认证GESP—C++5级—20231209
CCF编程能力等级认证GESP—C5级—20231209 单选题(每题 2 分,共 30 分)判断题(每题 2 分,共 20 分)编程题 (每题 25 分,共 50 分)小杨的幸运数烹饪问题 答案及解析单选题判断题编程题1编程题2 单…...

【论文精读】GPT2
摘要 在单一领域数据集上训练单一任务的模型是当前系统普遍缺乏泛化能力的主要原因,要想使用当前的架构构建出稳健的系统,可能需要多任务学习。但多任务需要多数据集,而继续扩大数据集和目标设计的规模是个难以处理的问题,所以只能…...

10-k8s中pod的探针
一、探针的概念 一般时候,探针的设置,都是为了优化业务时,需要做的事情;属于后期工作; 1,探针的分类 1,健康状态检查探针:livenessProbe 当我们设置了这个探针之后,检查…...
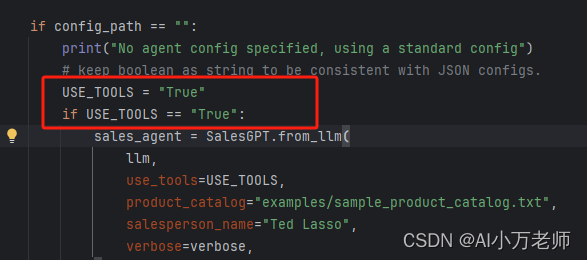
【Langchain Agent研究】SalesGPT项目介绍(二)
【Langchain Agent研究】SalesGPT项目介绍(一)-CSDN博客 上节课,我们介绍了SalesGPT他的业务流程和技术架构,这节课,我们来关注一下他的项目整体结构、poetry工具和一些工程项目相关的设计。 项目整体结构介绍 我们把…...
Cilium动手实验室: 精通之旅---20.Isovalent Enterprise for Cilium: Zero Trust Visibility
Cilium动手实验室: 精通之旅---20.Isovalent Enterprise for Cilium: Zero Trust Visibility 1. 实验室环境1.1 实验室环境1.2 小测试 2. The Endor System2.1 部署应用2.2 检查现有策略 3. Cilium 策略实体3.1 创建 allow-all 网络策略3.2 在 Hubble CLI 中验证网络策略源3.3 …...

Mac下Android Studio扫描根目录卡死问题记录
环境信息 操作系统: macOS 15.5 (Apple M2芯片)Android Studio版本: Meerkat Feature Drop | 2024.3.2 Patch 1 (Build #AI-243.26053.27.2432.13536105, 2025年5月22日构建) 问题现象 在项目开发过程中,提示一个依赖外部头文件的cpp源文件需要同步,点…...
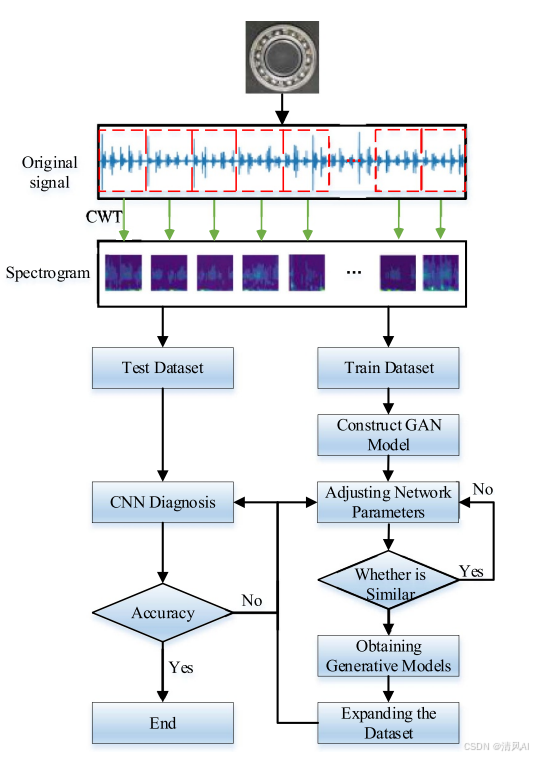
基于IDIG-GAN的小样本电机轴承故障诊断
目录 🔍 核心问题 一、IDIG-GAN模型原理 1. 整体架构 2. 核心创新点 (1) 梯度归一化(Gradient Normalization) (2) 判别器梯度间隙正则化(Discriminator Gradient Gap Regularization) (3) 自注意力机制(Self-Attention) 3. 完整损失函数 二…...

离线语音识别方案分析
随着人工智能技术的不断发展,语音识别技术也得到了广泛的应用,从智能家居到车载系统,语音识别正在改变我们与设备的交互方式。尤其是离线语音识别,由于其在没有网络连接的情况下仍然能提供稳定、准确的语音处理能力,广…...
的打车小程序)
基于鸿蒙(HarmonyOS5)的打车小程序
1. 开发环境准备 安装DevEco Studio (鸿蒙官方IDE)配置HarmonyOS SDK申请开发者账号和必要的API密钥 2. 项目结构设计 ├── entry │ ├── src │ │ ├── main │ │ │ ├── ets │ │ │ │ ├── pages │ │ │ │ │ ├── H…...
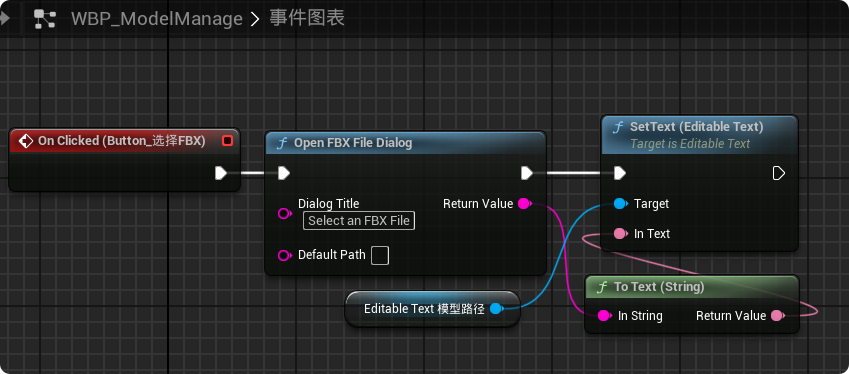
【UE5 C++】通过文件对话框获取选择文件的路径
目录 效果 步骤 源码 效果 步骤 1. 在“xxx.Build.cs”中添加需要使用的模块 ,这里主要使用“DesktopPlatform”模块 2. 添加后闭UE编辑器,右键点击 .uproject 文件,选择 "Generate Visual Studio project files",重…...

EEG-fNIRS联合成像在跨频率耦合研究中的创新应用
摘要 神经影像技术对医学科学产生了深远的影响,推动了许多神经系统疾病研究的进展并改善了其诊断方法。在此背景下,基于神经血管耦合现象的多模态神经影像方法,通过融合各自优势来提供有关大脑皮层神经活动的互补信息。在这里,本研…...
)
MySQL基本操作(续)
第3章:MySQL基本操作(续) 3.3 表操作 表是关系型数据库中存储数据的基本结构,由行和列组成。在MySQL中,表操作包括创建表、查看表结构、修改表和删除表等。本节将详细介绍这些操作。 3.3.1 创建表 在MySQL中&#…...

CentOS 7.9安装Nginx1.24.0时报 checking for LuaJIT 2.x ... not found
Nginx1.24编译时,报LuaJIT2.x错误, configuring additional modules adding module in /www/server/nginx/src/ngx_devel_kit ngx_devel_kit was configured adding module in /www/server/nginx/src/lua_nginx_module checking for LuaJIT 2.x ... not…...

Redis:常用数据结构 单线程模型
🌈 个人主页:Zfox_ 🔥 系列专栏:Redis 🔥 常用数据结构 🐳 Redis 当中常用的数据结构如下所示: Redis 在底层实现上述数据结构的过程中,会在源码的角度上对于上述的内容进行特定的…...