视觉slam十四讲学习笔记(六)视觉里程计 1
本文关注基于特征点方式的视觉里程计算法。将介绍什么是特征点,如何提取和匹配特征点,以及如何根据配对的特征点估计相机运动。
目录
前言
一、特征点法
1 特征点
2 ORB 特征
FAST 关键点
BRIEF 描述子
3 特征匹配
二、实践:特征提取和匹配
三、2D-2D: 对极几何
1 对极约束
2 本质矩阵
3 单应矩阵
四、实践:对极约束求解相机运动
五、三角测量
总结
前言
1. 理解图像特征点的意义, 并掌握在单幅图像中提取出特征点,及多幅图像中匹配特征点的方法。
2. 理解对极几何的原理,利用对极几何的约束,恢复出图像之间的摄像机的三维运动。
3. 理解 PNP 问题,及利用已知三维结构与图像的对应关系,求解摄像机的三维运动。
4. 理解 ICP 问题,及利用点云的匹配关系,求解摄像机的三维运动。
5. 理解如何通过三角化,获得二维图像上对应点的三维结构。
哔哩哔哩课程链接:视觉SLAM十四讲ch7_1_哔哩哔哩_bilibili
一、特征点法
特征点法通常是指在计算机视觉和图像处理中使用的一种方法,其目的是检测和描述图像中的关键特征点。这些特征点可以是图像中独特或显著的位置,如角点、边缘点等,它们在不同图像中具有相似性,因此可以用来进行图像匹配、目标跟踪、三维重建等应用。
特征点法的一般步骤包括以下几个方面:
-
特征点检测: 通过一些算法检测图像中的关键特征点,这些特征点通常是在局部区域内显著的位置,例如角点、边缘点等。常用的特征点检测算法包括Harris角点检测、Shi-Tomasi角点检测、SIFT(尺度不变特征变换)、SURF(加速鲁棒特征)等。
-
特征点描述: 对于检测到的特征点,需要提取其特征描述子,以便后续匹配。这些描述子通常是能够表征特征点周围局部结构的向量或矩阵。常用的特征描述算法包括SIFT描述子、SURF描述子、ORB(Oriented FAST and Rotated BRIEF)描述子等。
-
特征点匹配: 在不同图像中,通过比较特征点的描述子,找到相似的特征点对,从而建立图像间的对应关系。匹配可以使用一些距离度量或相似性度量来完成。
-
应用: 特征点法的应用非常广泛,包括图像配准、目标跟踪、三维重建、拼接图像、物体识别等领域。
1 特征点
VO 的主要问题是如何根据图像来估计相机运动。然而,图像本身是一个由亮度和色彩组成的矩阵,如果直接从矩阵层面考虑运动估计,将会非常困难。所以,习惯于采用这样一种做法:首先,从图像中选取比较有代表性的点。这些点在相机视角发生少量变化后会保持不变,所以会在各个图像中找到相同的点。然后,在这些点的基础上,讨论相机位姿估计问题,以及这些点的定位问题。在经典 SLAM 模型中,把它们称为路标。而在视觉 SLAM 中,路标则是指图像特征(Features)。
- 特征是图像信息的另一种数字表达形式。
- 特征点在相机运动之后保持稳定。
- 特征点是图像里一些特别的地方。

可以作为图像特征的部分:角点、边缘、区块。
人工设计的特征点能够拥有如下的性质:
1. 可重复性(Repeatability):相同的“区域”可以在不同的图像中被找到。
2. 可区别性(Distinctiveness):不同的“区域”有不同的表达。
3. 高效率(Efficiency):同一图像中,特征点的数量应远小于像素的数量。
4. 本地性(Locality):特征仅与一小片图像区域相关。
特征点由关键点(Key-point)和描述子(Descriptor)两部分组成。
比方说,当谈论 SIFT 特征时,是指“提取 SIFT 关键点,并计算 SIFT 描述子”两件事情。关键点是指该特征点在图像里的位置,有些特征点还具有朝向、大小等信息。描述子通常是一个向量,按照某种人为设计的方式,描述了该关键点周围像素的信息。描述子是按照“外观相似的特征应该有相似的描述子”的原则设计的。因此,只要两个特征点的描述子在向量空间上的距离相近,就可以认为它们是同样的特征点。
2 ORB 特征

OpenCV 提供的 ORB 特征点检测结果。
ORB 特征亦由关键点和描述子两部分组成。它的关键点称为“Oriented FAST”,是一种改进的 FAST 角点,什么是 FAST 角点我们将在下文介绍。它的描述子称为 BRIEF(Binary Robust Independent Elementary Features)。因此,提取 ORB 特征分为两个步骤:
1. FAST 角点提取:找出图像中的” 角点”。相较于原版的 FAST, ORB 中计算了特征点的主方向,为后续的 BRIEF 描述子增加了旋转不变特性。
2. BRIEF 描述子:对前一步提取出特征点的周围图像区域进行描述。
FAST 关键点
FAST(Features from Accelerated Segment Test)是一种用于快速检测图像中角点的特征点检测算法。FAST 算法主要用于实时应用,它在速度和计算效率上表现出色,并且在相对平滑的图像中能够准确地检测到关键点。
以下是 FAST 算法的主要特点和步骤:
-
加速度段测试(Accelerated Segment Test): FAST 算法使用一种称为加速度段测试的策略来判断一个像素是否是关键点。在这个测试中,选择了一个中心像素点和周围的16个像素点,然后根据这些像素点的灰度值与中心像素的灰度值进行比较,以判断中心像素是否是一个关键点。这个测试是基于一种简单的圆形区域的像素采样。
-
非极大值抑制: 在加速度段测试的结果中,如果中心像素是一个关键点,就会产生一些相邻的像素点也可能被认为是关键点。为了防止重复检测,FAST 算法进行非极大值抑制,只选择那些在某个阈值下,灰度值超过相邻像素灰度值的中心像素点作为最终的关键点。
-
参数选择: FAST 算法中有一个重要的参数,即阈值。阈值的选择影响到算法的灵敏度,可以根据具体应用场景进行调整。
FAST 算法的优点在于其计算速度快,适用于实时应用,但缺点是对图像噪声和纹理较敏感。在一些情况下,FAST 可以用于快速初始化特征点,然后通过其他方法(例如,通过机器学习方法或描述子匹配)来提高准确性。FAST 算法常常用于计算机视觉领域中的实时特征点检测,如图像拼接、物体跟踪和视觉SLAM(Simultaneous Localization and Mapping)等应用中。
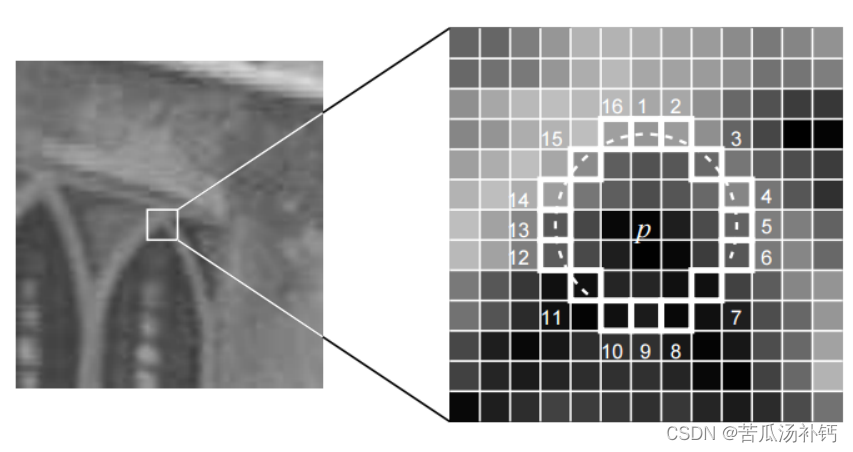
FAST 是一种角点,主要检测局部像素灰度变化明显的地方,以速度快著称。它的思想是:如果一个像素与它邻域的像素差别较大(过亮或过暗), 那它更可能是角点。相比于其他角点检测算法,FAST 只需比较像素亮度的大小,十分快捷。它的检测过程如下:
1. 在图像中选取像素 p,假设它的亮度为 Ip。
2. 设置一个阈值 T(比如 Ip 的 20%)。
3. 以像素 p 为中心, 选取半径为 3 的圆上的 16 个像素点。
4. 假如选取的圆上,有连续的 N 个点的亮度大于 Ip + T 或小于 Ip − T,那么像素 p可以被认为是特征点 (N 通常取 12,即为 FAST-12。其它常用的 N 取值为 9 和 11,他们分别被称为 FAST-9,FAST-11)。
5. 循环以上四步,对每一个像素执行相同的操作。
针对 FAST 角点不具有方向性和尺度的弱点,ORB 添加了尺度和旋转的描述。尺度不变性由构建图像金字塔,并在金字塔的每一层上检测角点来实现。而特征的旋转是由灰度质心法(Intensity Centroid)实现的。
BRIEF 描述子
BRIEF(Binary Robust Independent Elementary Features)是一种用于图像特征描述的算法。它主要用于生成图像中检测到的关键点的二进制描述子,用于在图像匹配和目标识别等任务中进行特征匹配。
以下是 BRIEF 描述子的主要特点和步骤:
-
二进制描述子生成: BRIEF 描述子的主要思想是通过在关键点周围选择一组固定的、随机的像素对,并比较它们的灰度值来生成二进制字符串。这些比较结果被编码成二进制位,形成一个二进制向量,称为 BRIEF 描述子。
-
随机选择的像素对: BRIEF 算法在每个关键点周围随机选择一组像素对,这些像素对的选择对于最终的描述子起到关键作用。这种随机性带来了描述子的差异性,使其更具区分性。
-
描述子长度: BRIEF 描述子的长度由用户指定,通常为一个定长的二进制字符串。较长的描述子可能提供更好的区分性,但也需要更多的存储和计算资源。
-
不变性: BRIEF 描述子相对于尺度和旋转是不变的。这是通过在图像尺度空间中选择随机像素对的方法实现的。
尽管 BRIEF 描述子具有计算速度快、存储需求低的优势,但它对图像噪声和干扰较为敏感。为了提高鲁棒性,通常会与其他算法一起使用,例如在关键点检测中可以与 FAST 等方法结合使用。
总体而言,BRIEF 描述子在实时图像处理和计算资源受限的场景中表现良好,特别适用于嵌入式系统和移动设备等应用。
3 特征匹配
特征匹配是视觉 SLAM 中极为关键的一步,宽泛地说,特征匹配解决了 SLAM 中的数据关联问题(data association),即确定当前看到的路标与之前看到的路标之间的对应系。通过对图像与图像,或者图像与地图之间的描述子进行准确的匹配,可以为后续的姿态估计,优化等操作减轻大量负担。然而,由于图像特征的局部特性,误匹配的情况广泛存在,而且长期以来一直没有得到有效解决,目前已经成为视觉 SLAM 中制约性能提升的一大瓶颈。部分原因是因为场景中经常存在大量的重复纹理,使得特征描述非常相似。在这种情况下,仅利用局部特征解决误匹配是非常困难的。
- 最简单的特征匹配方法就是暴力匹配(Brute-Force Matcher)。
- 描述子距离表示了两个特征之间的相似程度,不过在实际运用中还可以取不同的距离度量范数。
- 用汉明距离(Hamming distance)做为度量——两个二进制串之间的汉明距离,指的是它们不同位数的个数。
- 快速近似最近邻( FLANN ) 算法更加适合于匹配点数量极多的情况。
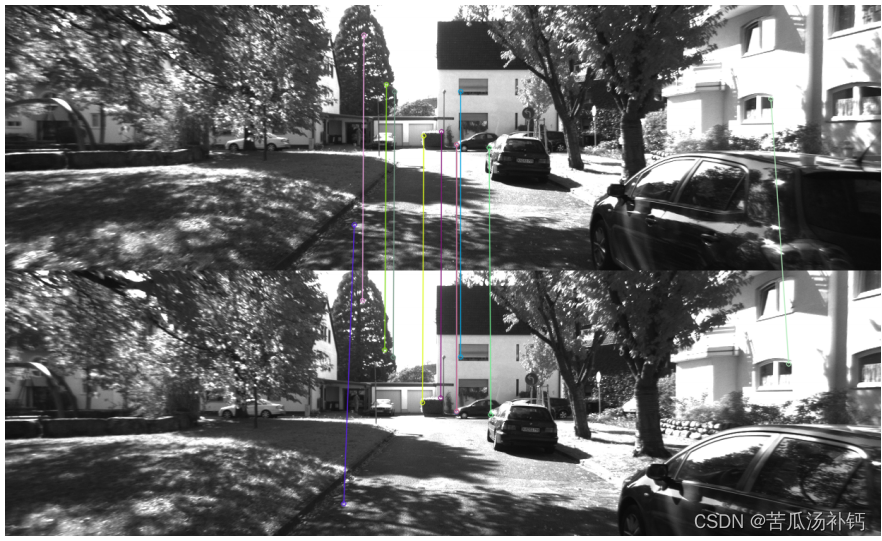
二、实践:特征提取和匹配

#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <opencv2/highgui/highgui.hpp>using namespace std;
using namespace cv;int main ( int argc, char** argv )
{if ( argc != 3 ){cout<<"usage: feature_extraction img1 img2"<<endl;return 1;}//-- 读取图像Mat img_1 = imread ( argv[1], CV_LOAD_IMAGE_COLOR );Mat img_2 = imread ( argv[2], CV_LOAD_IMAGE_COLOR );//-- 初始化std::vector<KeyPoint> keypoints_1, keypoints_2;Mat descriptors_1, descriptors_2;Ptr<FeatureDetector> detector = ORB::create();Ptr<DescriptorExtractor> descriptor = ORB::create();// Ptr<FeatureDetector> detector = FeatureDetector::create(detector_name);// Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create(descriptor_name);Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create ( "BruteForce-Hamming" );//-- 第一步:检测 Oriented FAST 角点位置detector->detect ( img_1,keypoints_1 );detector->detect ( img_2,keypoints_2 );//-- 第二步:根据角点位置计算 BRIEF 描述子descriptor->compute ( img_1, keypoints_1, descriptors_1 );descriptor->compute ( img_2, keypoints_2, descriptors_2 );Mat outimg1;drawKeypoints( img_1, keypoints_1, outimg1, Scalar::all(-1), DrawMatchesFlags::DEFAULT );imshow("ORB特征点",outimg1);//-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离vector<DMatch> matches;//BFMatcher matcher ( NORM_HAMMING );matcher->match ( descriptors_1, descriptors_2, matches );//-- 第四步:匹配点对筛选double min_dist=10000, max_dist=0;//找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离for ( int i = 0; i < descriptors_1.rows; i++ ){double dist = matches[i].distance;if ( dist < min_dist ) min_dist = dist;if ( dist > max_dist ) max_dist = dist;}// 仅供娱乐的写法min_dist = min_element( matches.begin(), matches.end(), [](const DMatch& m1, const DMatch& m2) {return m1.distance<m2.distance;} )->distance;max_dist = max_element( matches.begin(), matches.end(), [](const DMatch& m1, const DMatch& m2) {return m1.distance<m2.distance;} )->distance;printf ( "-- Max dist : %f \n", max_dist );printf ( "-- Min dist : %f \n", min_dist );//当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.std::vector< DMatch > good_matches;for ( int i = 0; i < descriptors_1.rows; i++ ){if ( matches[i].distance <= max ( 2*min_dist, 30.0 ) ){good_matches.push_back ( matches[i] );}}//-- 第五步:绘制匹配结果Mat img_match;Mat img_goodmatch;drawMatches ( img_1, keypoints_1, img_2, keypoints_2, matches, img_match );drawMatches ( img_1, keypoints_1, img_2, keypoints_2, good_matches, img_goodmatch );imshow ( "所有匹配点对", img_match );imshow ( "优化后匹配点对", img_goodmatch );waitKey(0);return 0;
}
对ch7文件夹中的cmake工程进行编译,报错:
undefined reference to `vtable for fmt::v7::format_error链接上fmt 库:
target_link_libraries("可执行文件" ${Sophus_LIBRARIES} fmt)未筛选的匹配中带有大量的误匹配。经过一次筛选之后,匹配数量减少了许多,大多数匹配都是正确的。这里筛选的依据是汉明距离小于最小距离的两倍,这是一种工程上的经验方法。尽管在示例图像中能够筛选出正确的匹配,但仍然不能保证在所有其他图像中得到的匹配都是正确的。因此,在后面的运动估计中,还需要使用去除误匹配的算法。
三、2D-2D: 对极几何
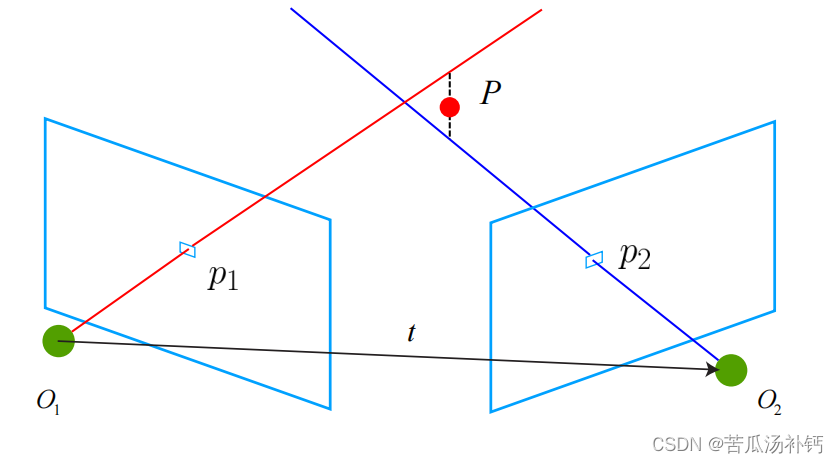
1 对极约束

对极约束简洁地给出了两个匹配点的空间位置关系。于是,相机位姿估计问题变为以下两步:
1. 根据配对点的像素位置,求出 E 或者 F;
2. 根据 E 或者 F,求出 R, t。
由于 E 和 F 只相差了相机内参,而内参在 SLAM 中通常是已知的,所以实践当中往往使用形式更简单的 E。我们以 E 为例,介绍上面两个问题如何求解。
2 本质矩阵
根据定义,本质矩阵 E = t ∧R。它是一个 3 × 3 的矩阵,内有 9 个未知数。那么,是不是任意一个 3 × 3 的矩阵都可以被当成本质矩阵呢?从 E 的构造方式上看,有以下值得注意的地方:
• 本质矩阵是由对极约束定义的。由于对极约束是等式为零的约束,所以对 E 乘以任意非零常数后,对极约束依然满足。把这件事情称为 E 在不同尺度下是等价的。
• 根据 E = t ∧R,可以证明 [3],本质矩阵 E 的奇异值必定是 [σ, σ, 0]T 的形式。这称为本质矩阵的内在性质。
• 另一方面,由于平移和旋转各有三个自由度,故 t ∧R 共有六个自由度。但由于尺度等价性,故 E 实际上有五个自由度。
E 具有五个自由度的事实,表明我们最少可以用五对点来求解 E。但是,E 的内在性质是一种非线性性质,在求解线性方程时会带来麻烦,因此,也可以只考虑它的尺度等价性,使用八对点来估计 E——这就是经典的八点法(Eight-point-algorithm)。八点法只利用了 E 的线性性质,因此可以在线性代数框架下求解。
3 单应矩阵
除了基本矩阵和本质矩阵,还有一种称为单应矩阵(Homography)H 的东西,它描述了两个平面之间的映射关系。
四、实践:对极约束求解相机运动
五、三角测量
三角化获得地图点深度
总结
本文内容结束,关于实践部分,预计后续更新!
相关文章:
视觉slam十四讲学习笔记(六)视觉里程计 1
本文关注基于特征点方式的视觉里程计算法。将介绍什么是特征点,如何提取和匹配特征点,以及如何根据配对的特征点估计相机运动。 目录 前言 一、特征点法 1 特征点 2 ORB 特征 FAST 关键点 BRIEF 描述子 3 特征匹配 二、实践:特征提取…...
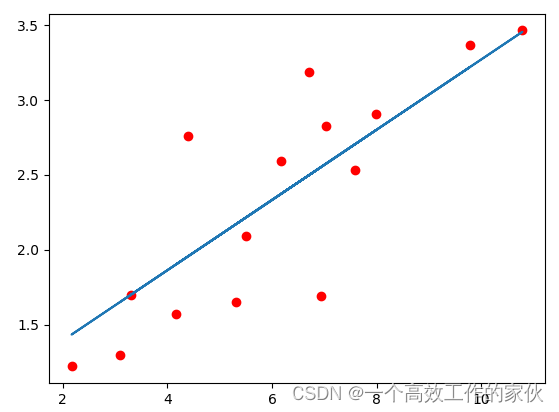
PyTorch-线性回归
已经进入大模微调的时代,但是学习pytorch,对后续学习rasa框架有一定帮助吧。 <!-- 给出一系列的点作为线性回归的数据,使用numpy来存储这些点。 --> x_train np.array([[3.3], [4.4], [5.5], [6.71], [6.93], [4.168],[9.779], [6.1…...

C++数据结构与算法——栈与队列
C第二阶段——数据结构和算法,之前学过一点点数据结构,当时是基于Python来学习的,现在基于C查漏补缺,尤其是树的部分。这一部分计划一个月,主要利用代码随想录来学习,刷题使用力扣网站,不定时更…...

掌上新闻随心播控,HarmonyOS SDK助力新浪新闻打造精致易用的资讯服务新体验
原生智能是HarmonyOS NEXT的核心亮点之一,依托HarmonyOS SDK丰富全面的开放能力,开发者只需通过几行代码,即可快速实现AI功能。新浪新闻作为鸿蒙原生应用开发的先行者之一,从有声资讯入手,将基于Speech Kit朗读控件上线…...

2024年危险化学品经营单位主要负责人证模拟考试题库及危险化学品经营单位主要负责人理论考试试题
题库来源:安全生产模拟考试一点通公众号小程序 2024年危险化学品经营单位主要负责人证模拟考试题库及危险化学品经营单位主要负责人理论考试试题是由安全生产模拟考试一点通提供,危险化学品经营单位主要负责人证模拟考试题库是根据危险化学品经营单位主…...

C/C++如何把指针所指向的指针设为空指针?
实践出真知,指针对于初学的友友来说,头都要大了。喵喵一直遵循在实践中学,在学习中实践,相信你也会有所得! 以下是该问题的解决方案: int** ptrPtr new int*; // 创建指向指针的指针 int* ptr new int;…...

第三节:基于 InternLM 和 LangChain 搭建你的知识库(课程笔记)
视频链接:https://www.bilibili.com/video/BV1sT4y1p71V/?vd_source3bbd0d74033e31cbca9ee35e111ed3d1 文档地址: https://github.com/InternLM/tutorial/tree/main/langchain 课程笔记: 1.仅仅包含训练时间点之前的数据,无法…...
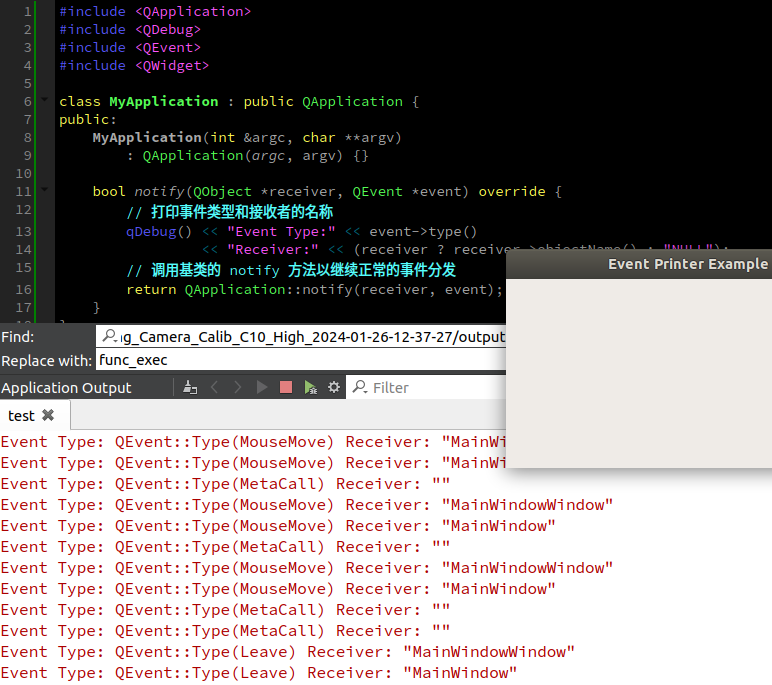
qt-C++笔记之打印所有发生的事件
qt-C笔记之打印所有发生的事件 code review! 文章目录 qt-C笔记之打印所有发生的事件1.ChatGPT问答使用 QApplication 的 notify 方法使用 QObject 的 event 方法 2.使用 QObject 的 event 方法3.使用 QApplication 的 notify 方法 1.ChatGPT问答 在Qt C中,若要打…...
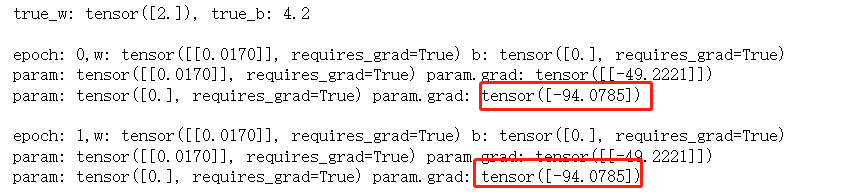
pytorch 实现线性回归(深度学习)
一 查看原始函数 初始化 %matplotlib inline import random import torch from d2l import torch as d2l 1.1 生成原始数据 def synthetic_data(w, b, num_examples):x torch.normal(0, 1, (num_examples, len(w)))y torch.matmul(x, w) bprint(x:, x)print(y:, y)y tor…...
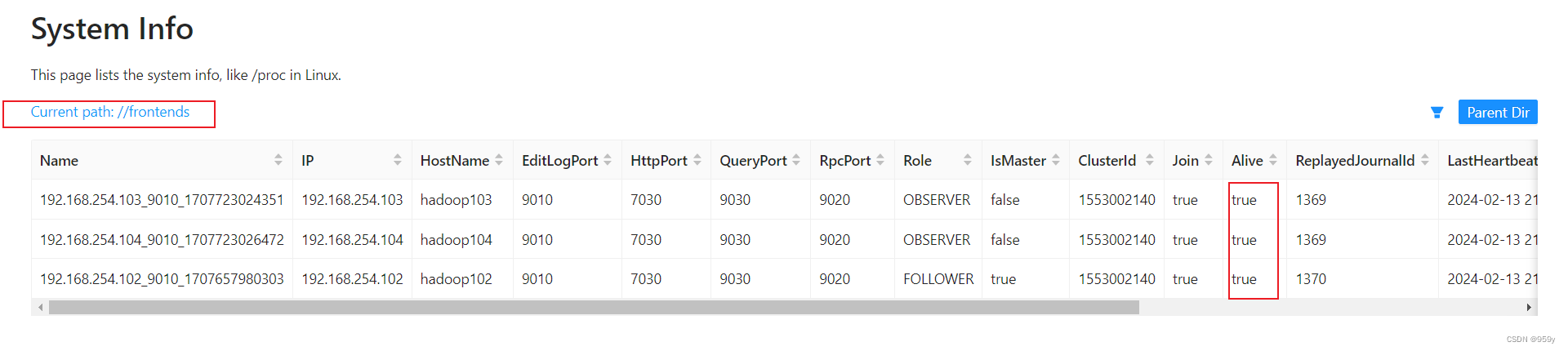
[Doris] Doris的安装和部署 (二)
文章目录 1.安装要求1.1 Linux操作系统要求1.2 软件需求1.3 注意事项1.4 内部端口 2.集群部署2.1 操作系统安装要求2.2 下载安装包2.3 解压2.4 配置FE2.5 配置BE2.6 添加BE2.7 FE 扩容和缩容2.8 Doris 集群群起脚本 3.图形化 1.安装要求 1.1 Linux操作系统要求 1.2 软件需求 1…...
)
【QT+QGIS跨平台编译】之三十五:【cairo+Qt跨平台编译】(一套代码、一套框架,跨平台编译)
文章目录 一、cairo介绍二、文件下载三、文件分析四、pro文件五、编译实践一、cairo介绍 Cairo是一个功能强大的开源2D图形库,它提供了一套跨平台的API,用于绘制矢量图形和文本。Cairo支持多种输出目标,包括屏幕、图像文件、PDF、SVG等。 Cairo的设计目标是简单易用、高效…...

MySQL(基础)
第01章_数据库概述 1. 为什么要使用数据库 持久化(persistence):把数据保存到可掉电式存储设备中以供之后使用。大多数情况下,特别是企业级应用,数据持久化意味着将内存中的数据保存到硬盘上加以”固化”,而持久化的实现过程大多…...

STM32F1 - 中断系统
Interrupt 1> 硬件框图2> NVIC 中断管理3> EXTI 中断管理3.1> EXTI与NVIC3.2> EXTI内部框图 4> 外部中断实验4.1> 实验概述4.2> 程序设计 5> 中断向量表6> 总结 1> 硬件框图 NVIC:Nested Vectored Interrupt Controller【嵌套向量…...
【Linux系统化学习】缓冲区
目录 缓冲区 一个样例 现象解释 缓冲区存在的位置 缓冲区 在刚开始学习C语言的时候我们就听过缓冲区这个名词,很是晦涩难懂;在Linux下进程退出时也包含缓冲区,因此缓冲区到底是什么?有什么作用? 让我们先从一个小…...
基于BP算法的SAR成像matlab仿真
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 4.1 BP算法的基本原理 4.2 BP算法的优点与局限性 5.完整工程文件 1.课题概述 基于BP算法的SAR成像。合成孔径雷达(SAR)是一种高分辨率的雷达系统,能够在各种天气和光…...
【C++ STL】你真的了解string吗?浅谈string的底层实现
文章目录 底层结构概述扩容机制浅拷贝与深拷贝插入和删除的效率浅谈VS和g的优化总结 底层结构概述 string可以帮助我们很好地管理字符串,但是你真的了解她吗?事实上,string的设计是非常复杂的,拥有上百个接口,但最常用…...
17.3.1.3 灰度
版权声明:本文为博主原创文章,转载请在显著位置标明本文出处以及作者网名,未经作者允许不得用于商业目的。 灰度的算法主要有以下三种: 1、最大值法: 原图像:颜色值color(R,G,B&a…...

基于CAS操作的atomic原子类型
在上一节的卖票程序中,我们讲解了如何在多线程中保证临界资源的正确访问——使用互斥锁,即 lock_guard<mutex> lock(mtx); count;lock_guard<mutex> lock(mtx); count--; 从汇编角度解释线程间互斥-mutex互斥锁与lock_guard的使用-CSDN博客…...

Rust HashMap详解及单词统计示例
在Rust中,HashMap是一种非常有用的数据结构,用于存储键值对。本文将深入介绍HashMap的特性,以及通过一个单词统计的例子展示其用法。 HashMap简介 HashMap是Rust标准库提供的用于存储键值对的数据结构。它允许通过键快速查找对应的值&#…...
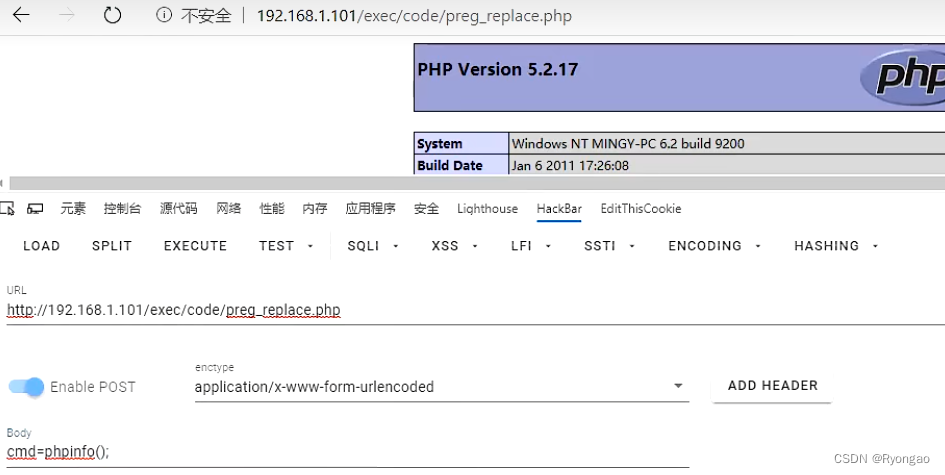
命令执行讲解和函数
命令执行漏洞简介 命令执行漏洞产生原因 应用未对用户输入做严格得检查过滤,导致用户输入得参数被当成命令来执行 命令执行漏洞的危害 1.继承Web服务程序的权限去执行系统命会或读写文件 2.反弹shell,获得目标服务器的权限 3.进一步内网渗透 远程代…...
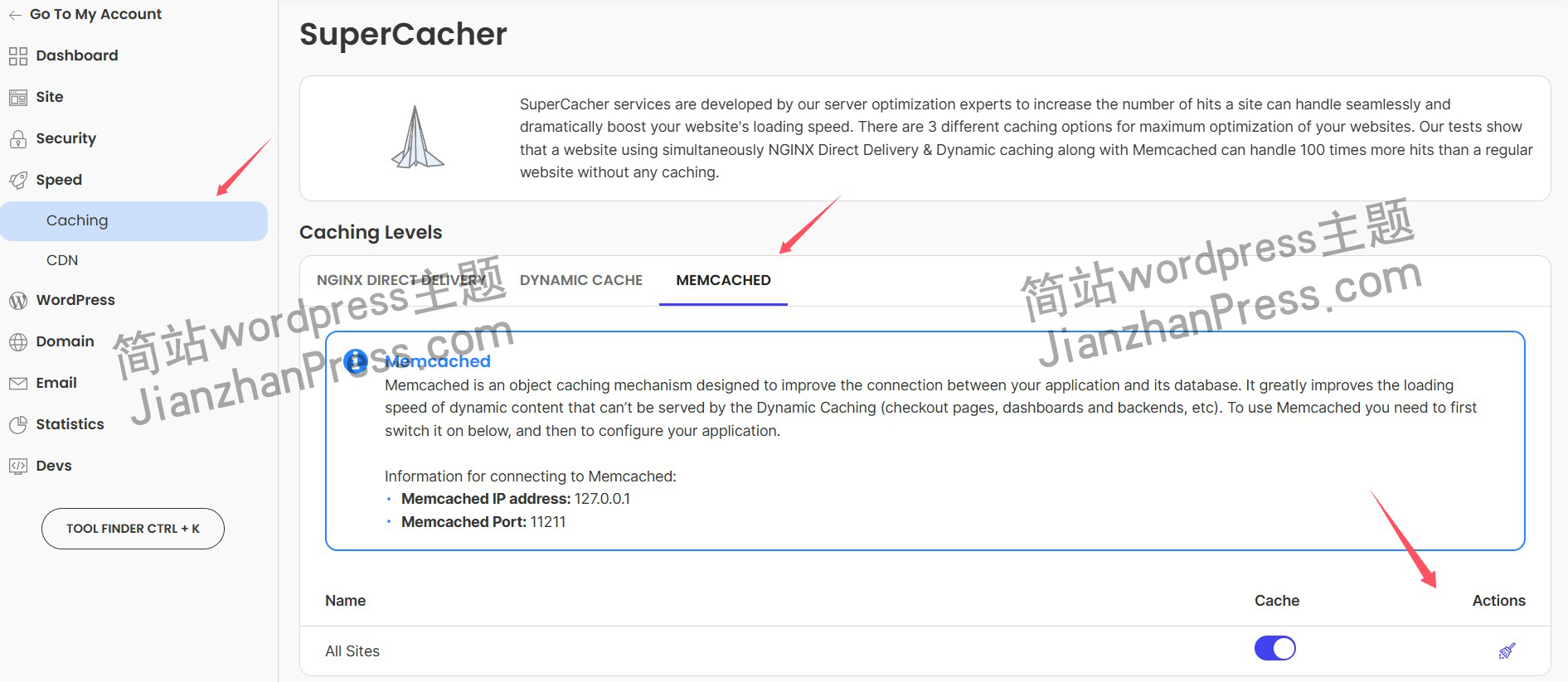
wordpress后台更新后 前端没变化的解决方法
使用siteground主机的wordpress网站,会出现更新了网站内容和修改了php模板文件、js文件、css文件、图片文件后,网站没有变化的情况。 不熟悉siteground主机的新手,遇到这个问题,就很抓狂,明明是哪都没操作错误&#x…...

ES6从入门到精通:前言
ES6简介 ES6(ECMAScript 2015)是JavaScript语言的重大更新,引入了许多新特性,包括语法糖、新数据类型、模块化支持等,显著提升了开发效率和代码可维护性。 核心知识点概览 变量声明 let 和 const 取代 var…...

服务器硬防的应用场景都有哪些?
服务器硬防是指一种通过硬件设备层面的安全措施来防御服务器系统受到网络攻击的方式,避免服务器受到各种恶意攻击和网络威胁,那么,服务器硬防通常都会应用在哪些场景当中呢? 硬防服务器中一般会配备入侵检测系统和预防系统&#x…...

测试markdown--肇兴
day1: 1、去程:7:04 --11:32高铁 高铁右转上售票大厅2楼,穿过候车厅下一楼,上大巴车 ¥10/人 **2、到达:**12点多到达寨子,买门票,美团/抖音:¥78人 3、中饭&a…...
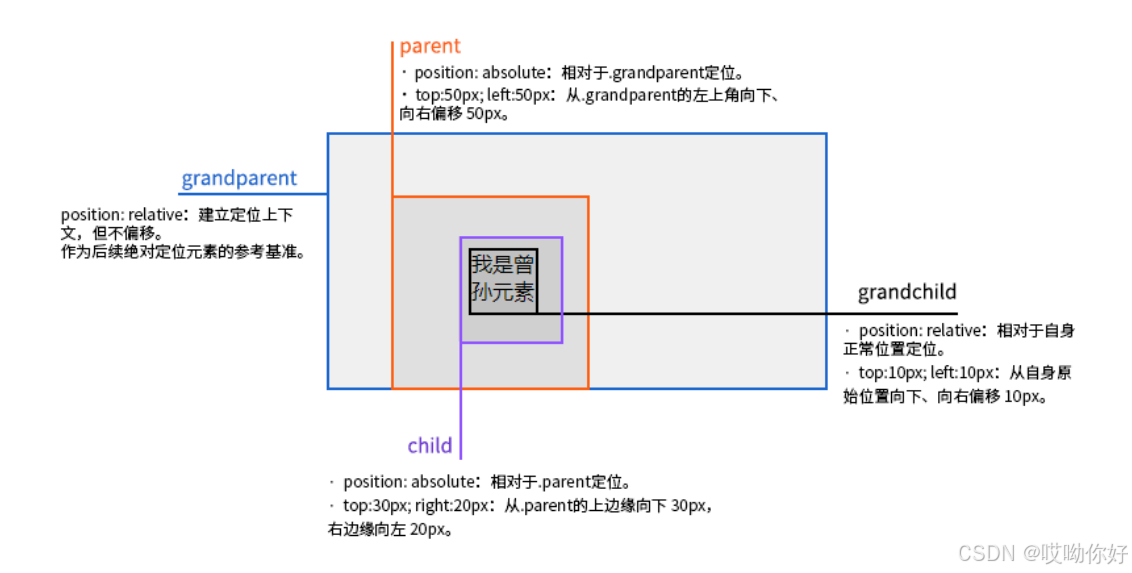
【CSS position 属性】static、relative、fixed、absolute 、sticky详细介绍,多层嵌套定位示例
文章目录 ★ position 的五种类型及基本用法 ★ 一、position 属性概述 二、position 的五种类型详解(初学者版) 1. static(默认值) 2. relative(相对定位) 3. absolute(绝对定位) 4. fixed(固定定位) 5. sticky(粘性定位) 三、定位元素的层级关系(z-i…...
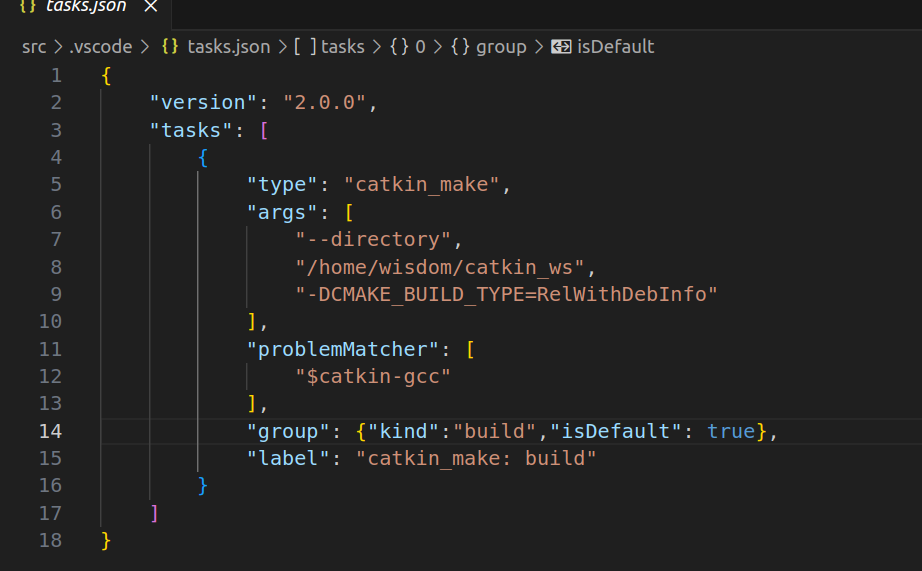
1.3 VSCode安装与环境配置
进入网址Visual Studio Code - Code Editing. Redefined下载.deb文件,然后打开终端,进入下载文件夹,键入命令 sudo dpkg -i code_1.100.3-1748872405_amd64.deb 在终端键入命令code即启动vscode 需要安装插件列表 1.Chinese简化 2.ros …...
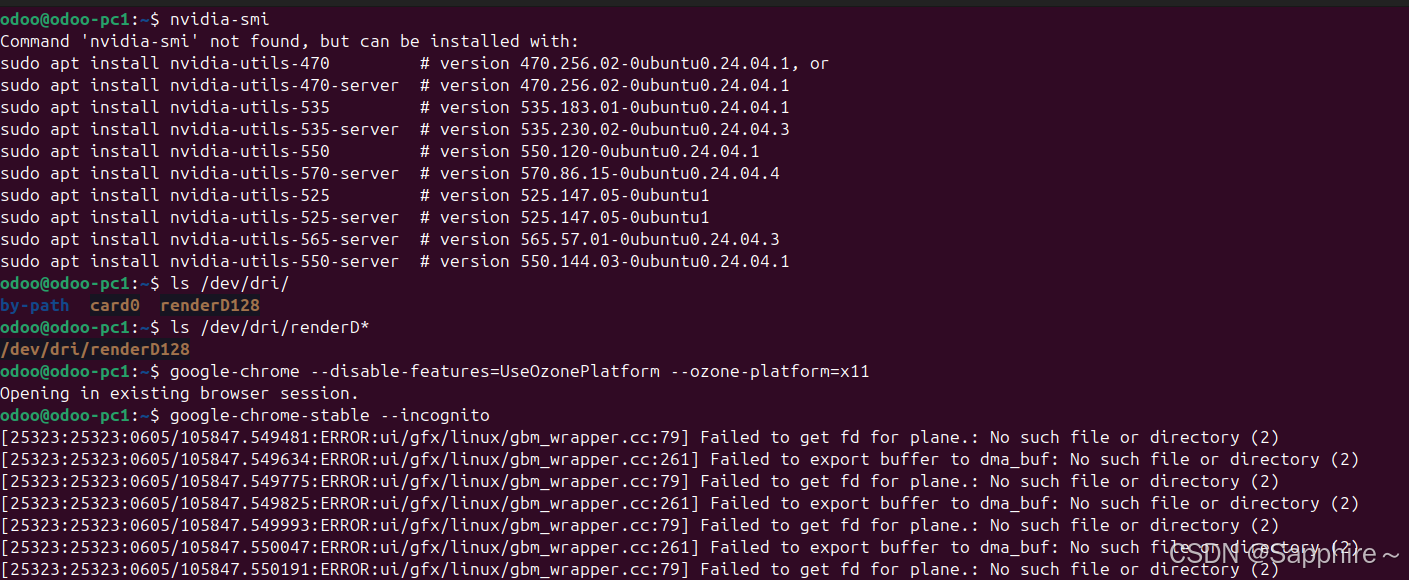
Linux-07 ubuntu 的 chrome 启动不了
文章目录 问题原因解决步骤一、卸载旧版chrome二、重新安装chorme三、启动不了,报错如下四、启动不了,解决如下 总结 问题原因 在应用中可以看到chrome,但是打不开(说明:原来的ubuntu系统出问题了,这个是备用的硬盘&a…...

QT: `long long` 类型转换为 `QString` 2025.6.5
在 Qt 中,将 long long 类型转换为 QString 可以通过以下两种常用方法实现: 方法 1:使用 QString::number() 直接调用 QString 的静态方法 number(),将数值转换为字符串: long long value 1234567890123456789LL; …...
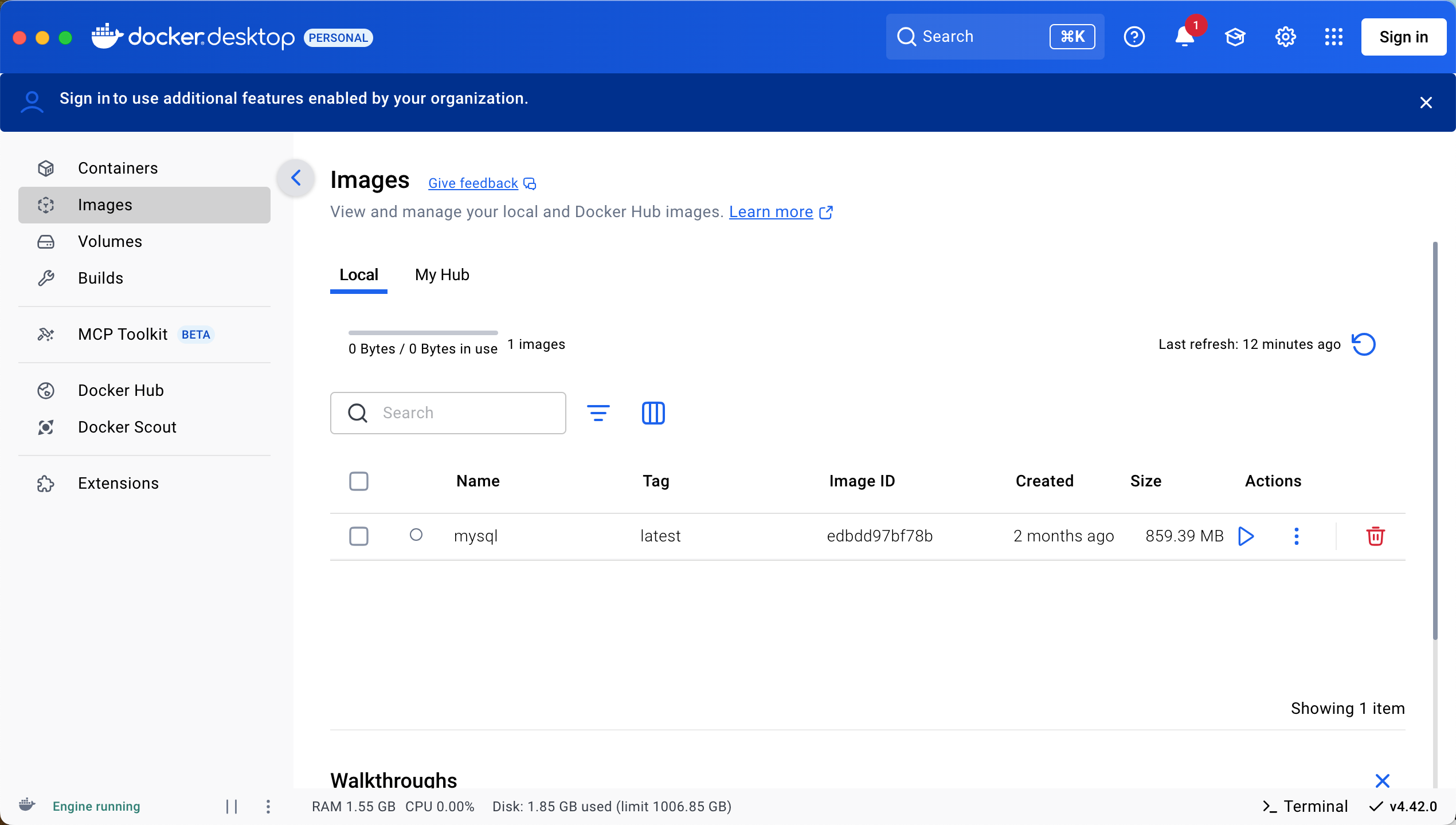
Docker 本地安装 mysql 数据库
Docker: Accelerated Container Application Development 下载对应操作系统版本的 docker ;并安装。 基础操作不再赘述。 打开 macOS 终端,开始 docker 安装mysql之旅 第一步 docker search mysql 》〉docker search mysql NAME DE…...

毫米波雷达基础理论(3D+4D)
3D、4D毫米波雷达基础知识及厂商选型 PreView : https://mp.weixin.qq.com/s/bQkju4r6med7I3TBGJI_bQ 1. FMCW毫米波雷达基础知识 主要参考博文: 一文入门汽车毫米波雷达基本原理 :https://mp.weixin.qq.com/s/_EN7A5lKcz2Eh8dLnjE19w 毫米波雷达基础…...