基于BP算法的SAR成像matlab仿真
目录
1.课题概述
2.系统仿真结果
3.核心程序与模型
4.系统原理简介
4.1 BP算法的基本原理
4.2 BP算法的优点与局限性
5.完整工程文件
1.课题概述
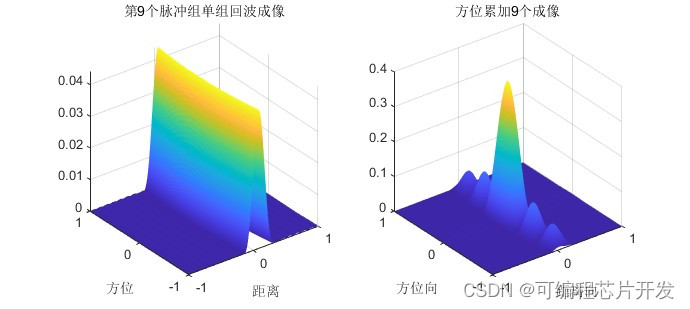
基于BP算法的SAR成像。合成孔径雷达(SAR)是一种高分辨率的雷达系统,能够在各种天气和光照条件下提供地表的高分辨率图像。BP(Back Projection)算法,即后向投影算法,是SAR成像中的一种常用算法,以其高精度和适应性强的特点而广受关注。
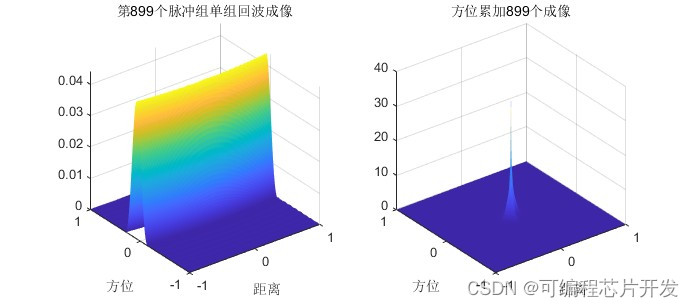
2.系统仿真结果

3.核心程序与模型
版本:MATLAB2022a
..........................................................................
N = 900; % 方位向点数
theta = (1:N)*(90/N); % 方位角范围 Pos_xy = [Rg*cosd(theta); Rg*sind(theta); Height*ones(1,N)]; % 雷达在真实空间中的位置坐标
Target = [0 0 0 1]; % 目标的位置坐标及后向散射系数 %回波数据生成
Secho = func_Echo_gen(Target,Pos_xy,C,Fre,Rc,M,N)%数据处理
data = func_data_process(Secho,R0,Pos_xy,Fre,Rc);
%BP
data = func_BP(data);
fxy = data.im_final;
gxy = abs(fxy)/max(abs(fxy(:))); % 为了准确显示点扩散函数剖面,对最终的成像结果做二维插值处理并显示插值后的图像
xtemp1 = linspace(-R0, R0, 4096); % 在距离向上生成更密集的采样点坐标范围
ytemp1 = linspace(-R0, R0, 4096); % 在方位向上生成更密集的采样点坐标范围(此处与xtemp1对称,但实际可能需要根据情况调整)
[Xtemp, Ytemp] = meshgrid(xtemp1, ytemp1); % 生成二维插值所需的网格坐标矩阵(更密集)
[X, Y] = meshgrid(data.xtemp, data.ytemp); % 原始成像结果的网格坐标矩阵(较稀疏)
fxyi = interp2(X, Y, fxy, Xtemp, Ytemp, 'spline'); % 使用样条插值方法对成像结果进行二维插值处理(得到更密集的复数矩阵)
gxyi = abs(fxyi)/max(abs(fxyi(:))); % 计算插值后的归一化幅度矩阵(二维实数矩阵)
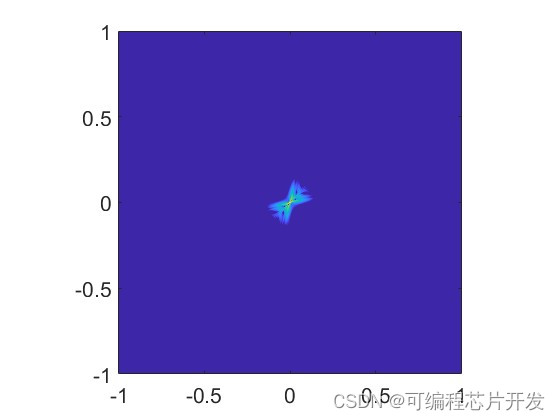
dis = 20*log10(gxyi); % 将幅度转换为分贝值表示(dB)并乘以20以转换为电压比的分贝值表示形式(dB相对于最大值)
maxdata = max(dis(:)); % 找到分贝值矩阵中的最大值(用于后续归一化处理)
G = dis - maxdata; % 对分贝值矩阵进行归一化处理(减去最大值以使最大值为0 dB)
G(G < -30) = -30; % 将小于-30 dB的值截断为-30 dB(避免显示过低的噪声水平)
h = figure('Name','目标BP成像效果'); % 创建新窗口并命名(此处与前面的窗口重名了,应该使用不同的名称以区分)
imagesc(xtemp1, ytemp1, G); % 使用imagesc函数显示归一化后的分贝值矩阵图像(以颜色表示幅度大小)
294.系统原理简介
SAR成像的基本原理是利用雷达平台与地表目标之间的相对运动,通过合成孔径技术来模拟一个大孔径的雷达天线,从而获得高分辨率的地表图像。在SAR系统中,雷达发射脉冲信号,并接收来自地表目标的回波信号。通过处理这些回波信号,可以提取出地表目标的散射特性和位置信息。
SAR成像的基本原理是利用雷达平台与目标之间的相对运动形成合成孔径,通过处理回波信号来获取目标的二维图像。SAR系统通过发射射频脉冲并接收来自地面的反射回波,测量回波的时间延迟和相位差异,从而计算出目标与雷达之间的距离和方位信息。
在SAR成像过程中,通常采用距离-多普勒(Range-Doppler)算法或距离-方位(Range-Azimuth)算法。距离-多普勒算法通过在快时间(距离)域和慢时间(方位)域分别进行傅里叶变换(FT)来实现成像。而距离-方位算法则通过在距离域进行FT,然后在方位域进行逆FT(IFT)来成像。
4.1 BP算法的基本原理
BP算法是一种时域成像算法,其基本思想是将雷达接收到的回波信号逐个像素地进行后向投影,从而重建出地表的高分辨率图像。BP算法的实现过程可以分为以下几个步骤:
- 数据预处理:对雷达接收到的原始回波数据进行预处理,包括距离压缩、运动补偿等操作,以消除雷达平台和地表目标之间的相对运动对成像结果的影响。
- 像素网格划分:将成像区域划分为若干个像素网格,每个像素网格代表地表的一个小区域。这些像素网格将作为后向投影的目标位置。
- 后向投影:对于每个像素网格,根据雷达的位置和速度信息,计算雷达与该像素网格之间的距离历程。然后,将雷达接收到的回波信号按照距离历程进行时延和相位补偿,再将其投影到该像素网格上。这一过程可以表示为数学公式:
- 图像重建:通过遍历所有像素网格,重复执行步骤3中的后向投影操作,最终得到整个成像区域的高分辨率图像。
4.2 BP算法的优点与局限性
BP算法作为一种高精度的SAR成像算法,具有以下优点:
- 精度高:BP算法在成像过程中考虑了雷达与地表目标之间的相对运动,能够准确地重建出地表的高分辨率图像。
- 适应性强:BP算法对雷达平台的运动轨迹和地表目标的散射特性没有严格的限制,因此适用于各种复杂的成像场景。
- 算法简单直观:BP算法的实现过程相对简单直观,易于理解和实现。
然而,BP算法也存在一些局限性:
- 计算量大:BP算法需要对每个像素网格进行逐个投影操作,因此计算量较大,成像速度较慢。
- 内存消耗高:由于需要存储大量的回波数据和中间结果,BP算法对内存的需求较高。
5.完整工程文件
v
相关文章:
基于BP算法的SAR成像matlab仿真
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 4.1 BP算法的基本原理 4.2 BP算法的优点与局限性 5.完整工程文件 1.课题概述 基于BP算法的SAR成像。合成孔径雷达(SAR)是一种高分辨率的雷达系统,能够在各种天气和光…...
【C++ STL】你真的了解string吗?浅谈string的底层实现
文章目录 底层结构概述扩容机制浅拷贝与深拷贝插入和删除的效率浅谈VS和g的优化总结 底层结构概述 string可以帮助我们很好地管理字符串,但是你真的了解她吗?事实上,string的设计是非常复杂的,拥有上百个接口,但最常用…...
17.3.1.3 灰度
版权声明:本文为博主原创文章,转载请在显著位置标明本文出处以及作者网名,未经作者允许不得用于商业目的。 灰度的算法主要有以下三种: 1、最大值法: 原图像:颜色值color(R,G,B&a…...

基于CAS操作的atomic原子类型
在上一节的卖票程序中,我们讲解了如何在多线程中保证临界资源的正确访问——使用互斥锁,即 lock_guard<mutex> lock(mtx); count;lock_guard<mutex> lock(mtx); count--; 从汇编角度解释线程间互斥-mutex互斥锁与lock_guard的使用-CSDN博客…...

Rust HashMap详解及单词统计示例
在Rust中,HashMap是一种非常有用的数据结构,用于存储键值对。本文将深入介绍HashMap的特性,以及通过一个单词统计的例子展示其用法。 HashMap简介 HashMap是Rust标准库提供的用于存储键值对的数据结构。它允许通过键快速查找对应的值&#…...
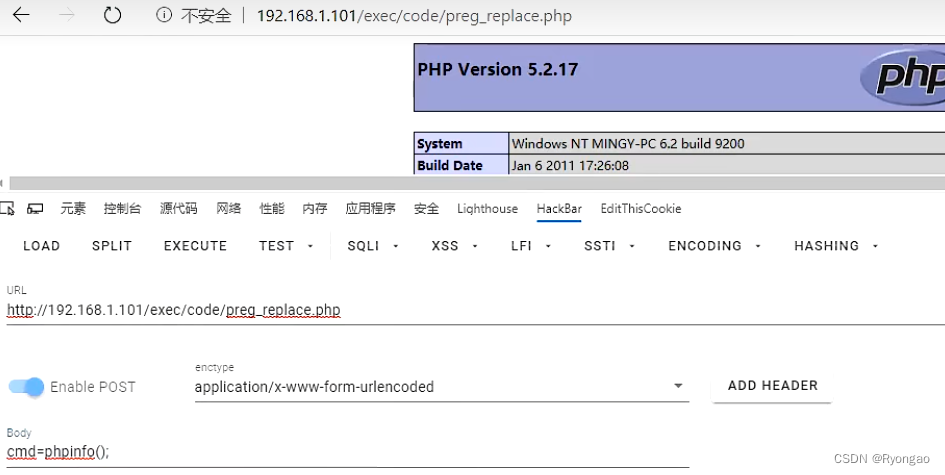
命令执行讲解和函数
命令执行漏洞简介 命令执行漏洞产生原因 应用未对用户输入做严格得检查过滤,导致用户输入得参数被当成命令来执行 命令执行漏洞的危害 1.继承Web服务程序的权限去执行系统命会或读写文件 2.反弹shell,获得目标服务器的权限 3.进一步内网渗透 远程代…...
外包实在是太坑了,划水三年,感觉人都废了
先说一下自己的情况,专科生,19年通过校招进入杭州某个外包软件公司,干了接近3年的功能测试,今年年初,感觉自己不能够在这样下去了,长时间呆在一个舒适的环境会让一个人堕落! 而我已经在一个企业干了3年的功…...

代码随想录算法训练营第19天
77. 组合 给定两个整数 n 和 k,返回范围 [1, n] 中所有可能的 k 个数的组合。 class Solution:def combine(self, n: int, k: int) -> List[List[int]]:path []res []def dfs(n,k,index):if len(path) k:res.append(path[:])returnfor i in range(index,n1):…...

树莓派5 EEPROM引导加载程序恢复镜像
树莓派5不能正常启动,可以通过电源led灯的闪码来判断错误发生的大致情形。 LED警告闪码 如果树莓派由于某种原因无法启动,或者不得不关闭,在许多情况下,LED会闪烁特定的次数来指示发生了什么。LED会闪烁几次长闪烁,然…...

循序渐进-讲解Markdown进阶(Mermaid绘图)-附使用案例
Markdown 进阶操作 查看更多学习笔记:GitHub:LoveEmiliaForever Mermaid官网 由于CSDN对某些Mermaid或Markdown语法不支持,因此我的某些效果展示使用图片进行 下面的笔记内容全部是我根据Mermaid官方文档学习的,因为是初学者所以…...

寒假作业2月6号
第五章 静态成员与友元 一、填空题 1、一个类的头文件如下所示,num初始化值为5,程序产生对象T,且修改num为10,并使用show()函数输出num的值10。 #include <iostream.h> class Test { private: static int num; publi…...

ChatGPT绘图指南:DALL.E3玩法大全(一)
一、 DALLE.3 模型介绍 1、什么是 DALLE.3 模型? DALLE-3模型,是一种由OpenAI研发的技术,它是一种先进的生成模型,可以将文字描述转化为清晰的图片。这种模型的名称"DALLE"实际上是"Deep Auto-regressive Latent …...

计算机服务器中了_locked勒索病毒怎么办?Encrypted勒索病毒解密数据恢复
随着网络技术的不断发展,数字化办公已经成为企业生产运营的根本,对于企业来说,数据至关重要,但网络威胁无处不在,近期,云天数据恢复中心接到很多企业的求助,企业的计算机服务器遭到了_locked勒索…...
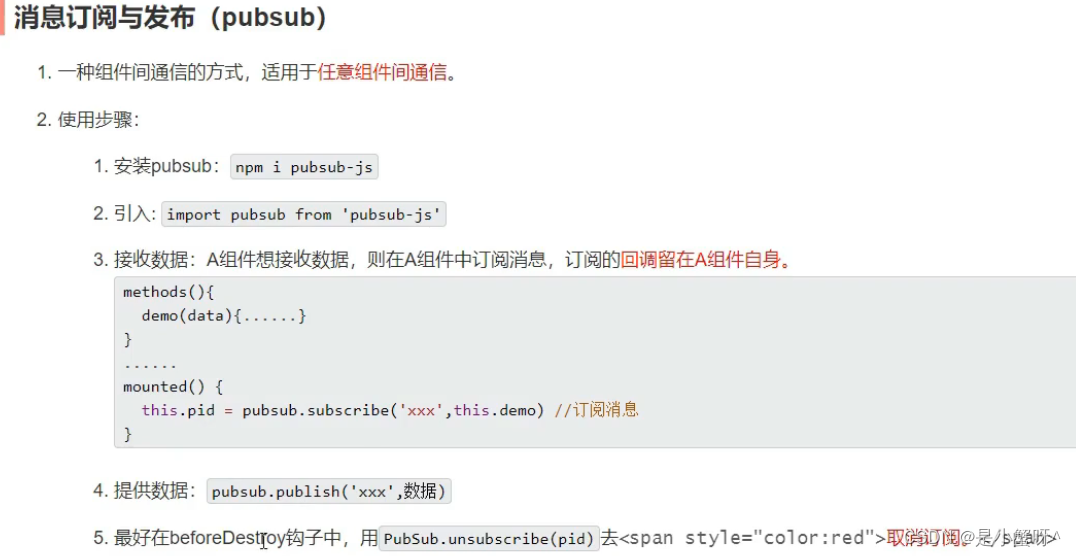
VueCLI核心知识3:全局事件总线、消息订阅与发布
这两种方式都可以实现任意两个组件之间的通信 1 全局事件总线 1.安装全局事件总线 import Vue from vue import App from ./App.vueVue.config.productionTip false/* 1.第一种写法 */ // const Demo Vue.extend({}) // const d new Demo()// Vue.prototype.x d // 把Dem…...

Redis中缓存问题
缓存预热 Redis缓存预热是一项关键任务,可帮助提升应用程序的性能和响应速度。在高流量的应用程序中,Redis缓存预热可以加速数据查询和读取,从而改善用户体验。本文将介绍一种快速、稳定的Redis缓存预热方案,并提供相应代码实现。…...
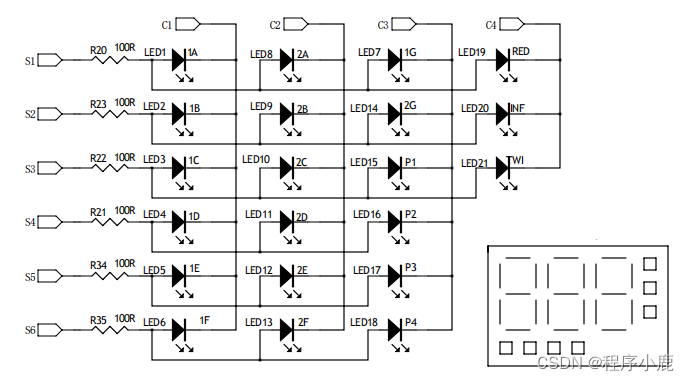
数码管扫描显示-单片机通用模板
数码管扫描显示-单片机通用模板 一、数码管扫描的原理二、display.c的实现1、void Display(void) 各模式界面定义数据2、void BackupRamToDisRam(void)从缓存区刷新显示映射Ram3、void FreshDisplay(void) 映射显示Ram到主控的IO口4、void LcdDisplay_8bit(void) 映射显示Ram到…...
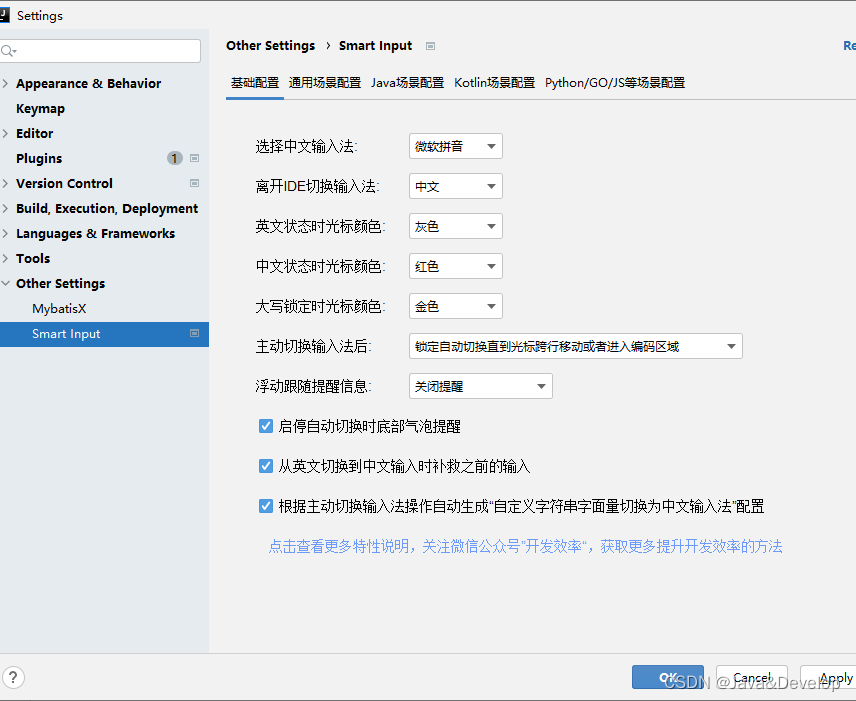
IDEA中的神仙插件——Smart Input (自动切换输入法)
IDEA中的神仙插件——Smart Input (自动切换输入法) 设置 更多功能详见官方文档:Windows版SmartInput使用入门...
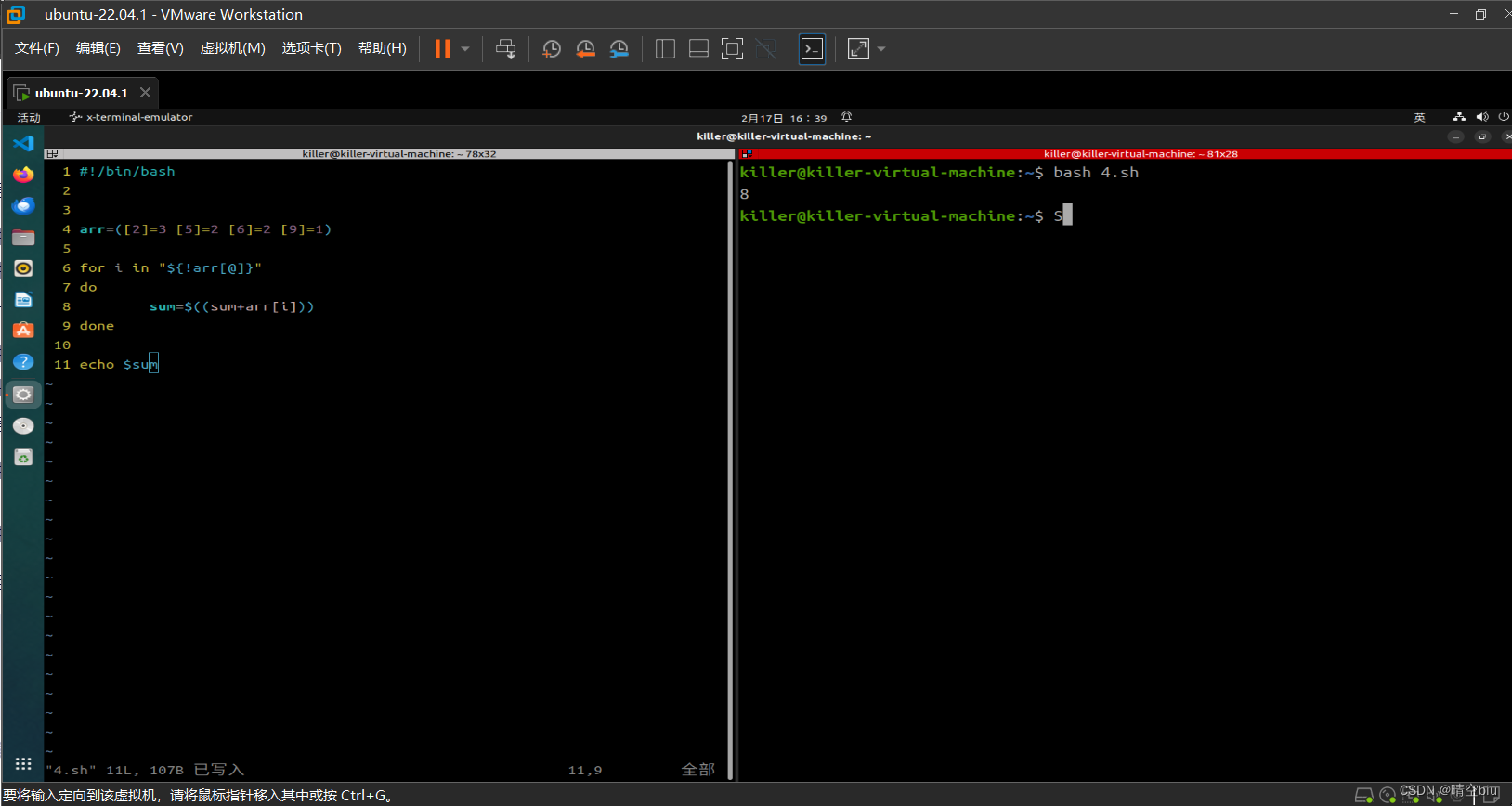
shell编程:求稀疏数组中元素的和(下标不连续)
#!/bin/basharr([2]3 [5]2 [6]2 [9]1)for i in "${!arr[]}" dosum$((sumarr[i])) doneecho $sumBash 脚本中,* 和 符号在数组上下文中有不同的用途。当使用它们来遍历数组时,必须了解它们之间的区别。 * (无前置感叹号 !): 在索引…...

Rust 学习笔记 - 详解数据类型
前言 任何一门编程语言几乎都脱离不了:变量、基本类型、函数、注释、循环、条件判断,这是一门编程语言的语法基础,只有当掌握这些基础语法及概念才能更好的学习 Rust。 标量类型(Scalar Types) 在 Rust 中ÿ…...

构建本地yum源
下载repo数据文件 根据需要修改下载路径和reposync参数 #!/bin/bashlocal_path/repo/remote/rhel9 enabled_repos$(yum repolist enabled | awk NR>3{print $1}) tempfile$(mktemp -t reposync.XXXX)check() {echo "目标目录剩余空间: $(df -h ${local_path} | awk …...
docker详细操作--未完待续
docker介绍 docker官网: Docker:加速容器应用程序开发 harbor官网:Harbor - Harbor 中文 使用docker加速器: Docker镜像极速下载服务 - 毫秒镜像 是什么 Docker 是一种开源的容器化平台,用于将应用程序及其依赖项(如库、运行时环…...
:にする)
日语学习-日语知识点小记-构建基础-JLPT-N4阶段(33):にする
日语学习-日语知识点小记-构建基础-JLPT-N4阶段(33):にする 1、前言(1)情况说明(2)工程师的信仰2、知识点(1) にする1,接续:名词+にする2,接续:疑问词+にする3,(A)は(B)にする。(2)復習:(1)复习句子(2)ために & ように(3)そう(4)にする3、…...

FFmpeg 低延迟同屏方案
引言 在实时互动需求激增的当下,无论是在线教育中的师生同屏演示、远程办公的屏幕共享协作,还是游戏直播的画面实时传输,低延迟同屏已成为保障用户体验的核心指标。FFmpeg 作为一款功能强大的多媒体框架,凭借其灵活的编解码、数据…...

前端倒计时误差!
提示:记录工作中遇到的需求及解决办法 文章目录 前言一、误差从何而来?二、五大解决方案1. 动态校准法(基础版)2. Web Worker 计时3. 服务器时间同步4. Performance API 高精度计时5. 页面可见性API优化三、生产环境最佳实践四、终极解决方案架构前言 前几天听说公司某个项…...
【HarmonyOS 5.0】DevEco Testing:鸿蒙应用质量保障的终极武器
——全方位测试解决方案与代码实战 一、工具定位与核心能力 DevEco Testing是HarmonyOS官方推出的一体化测试平台,覆盖应用全生命周期测试需求,主要提供五大核心能力: 测试类型检测目标关键指标功能体验基…...
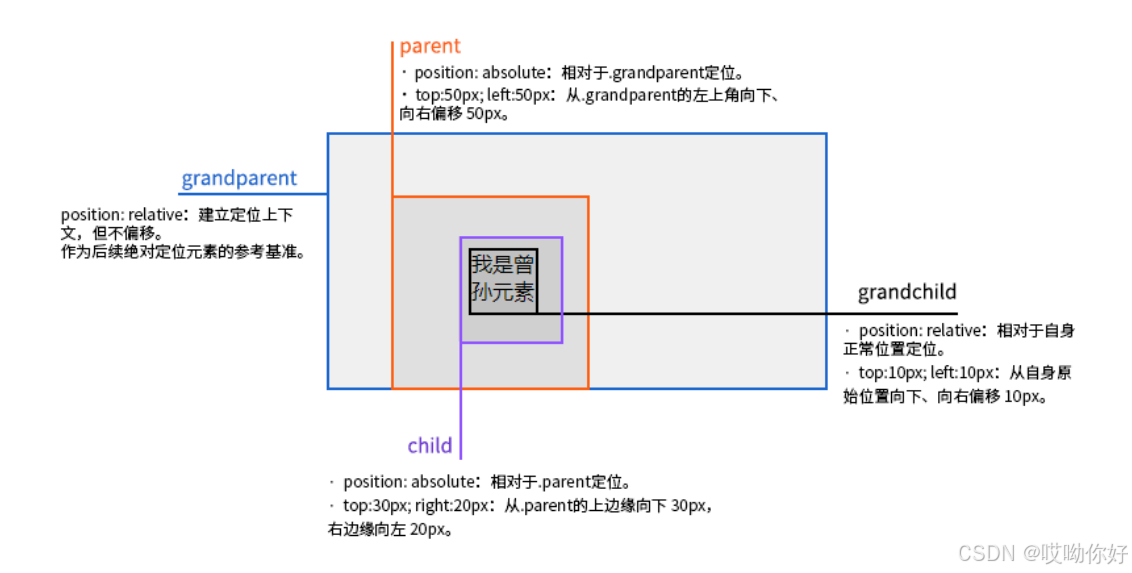
【CSS position 属性】static、relative、fixed、absolute 、sticky详细介绍,多层嵌套定位示例
文章目录 ★ position 的五种类型及基本用法 ★ 一、position 属性概述 二、position 的五种类型详解(初学者版) 1. static(默认值) 2. relative(相对定位) 3. absolute(绝对定位) 4. fixed(固定定位) 5. sticky(粘性定位) 三、定位元素的层级关系(z-i…...

【HTML-16】深入理解HTML中的块元素与行内元素
HTML元素根据其显示特性可以分为两大类:块元素(Block-level Elements)和行内元素(Inline Elements)。理解这两者的区别对于构建良好的网页布局至关重要。本文将全面解析这两种元素的特性、区别以及实际应用场景。 1. 块元素(Block-level Elements) 1.1 基本特性 …...
多种风格导航菜单 HTML 实现(附源码)
下面我将为您展示 6 种不同风格的导航菜单实现,每种都包含完整 HTML、CSS 和 JavaScript 代码。 1. 简约水平导航栏 <!DOCTYPE html> <html lang"zh-CN"> <head><meta charset"UTF-8"><meta name"viewport&qu…...

AspectJ 在 Android 中的完整使用指南
一、环境配置(Gradle 7.0 适配) 1. 项目级 build.gradle // 注意:沪江插件已停更,推荐官方兼容方案 buildscript {dependencies {classpath org.aspectj:aspectjtools:1.9.9.1 // AspectJ 工具} } 2. 模块级 build.gradle plu…...

华硕a豆14 Air香氛版,美学与科技的馨香融合
在快节奏的现代生活中,我们渴望一个能激发创想、愉悦感官的工作与生活伙伴,它不仅是冰冷的科技工具,更能触动我们内心深处的细腻情感。正是在这样的期许下,华硕a豆14 Air香氛版翩然而至,它以一种前所未有的方式&#x…...