遨博I20协作臂关节逆解组Matlab可视化
AUBO I20协作臂关节逆解组Matlab可视化
- 前言
- 1、RTB使用注意点
- 2、代码与效果
- 2.1、完整代码
- 2.2、运行效果
- 总结
前言
注意:请预先配置好Matlab和RTB机器人工具箱环境,本文使用matlab2022b和RTB10.04版本
工作需要,使用matlab实现对六轴机械臂的逆解八组解数据可视化。本文针对遨博AUBO I20型号的协作臂进行处理。
提示:以下是本篇文章正文内容,下面案例可供参考
1、RTB使用注意点
当图形需要显示多个机器人或者多个不同关节角时,每个plot都需要一个唯一的名称,否则,只会显示同名的最新一组调用plot的关节角。例如,现在针对同一个DH参数的臂型,有两组关节角希望显示出来,那么应该这么写才正确:
joints_type1 = [a1 b1 c1 d1 e1 f1];
joints_type2 = [a2 b2 c2 d2 e2 f2];% robot1和robot2调用SerialLink创建时使用用一组DH参数L
% 'name'参数需要不同,作为区分。
robot1.plot(joints_type1);
hold on;
robot2.plot(joints_type2);
如果使用错误的写法,自始至终只有一个robot变量,即:
joints_type1 = [a1 b1 c1 d1 e1 f1];
joints_type2 = [a2 b2 c2 d2 e2 f2];robot1.plot(joints_type1);
hold on;
robot1.plot(joints_type2);
最终的效果,可以看到两个plot都是joints_type2的数据,即便是已经使用了hold on,这个问题和RTB的内部plot函数实现逻辑有关联;
2、代码与效果
2.1、完整代码
代码如下:
clear;
clc;
warning off% 定义连杆的DH参数
% theta d a alpha sigma offset
L(1) = Link([ 0 0.1855 0 0 0 pi ],'modified');
L(2) = Link([ 0 0.177 0 -pi/2 0 -pi/2 ],'modified');
L(3) = Link([ 0 0 0.803 pi 0 0 ],'modified');
L(4) = Link([ 0 0 0.72 pi 0 -pi/2 ],'modified');
L(5) = Link([ 0 0.127 0 -pi/2 0 0 ],'modified');
L(6) = Link([ 0 0.1063 0 pi/2 0 0 ],'modified');% 限制转动角度
L(1).qlim=[-359,359]/180*pi;
L(2).qlim=[-174,174]/180*pi;
L(3).qlim=[-174,174]/180*pi;
L(4).qlim=[-174,174]/180*pi;
L(5).qlim=[-174,174]/180*pi;
L(6).qlim=[-359,359]/180*pi;aubo_robots = struct();
aubo_robots_num = 8;
robot_name_prefix = 'I20-';% 创建机器人模型
for i = 1 : aubo_robots_numaubo_robots.(sprintf('robot%d', i)) = SerialLink(L, 'name', [robot_name_prefix, num2str(i)]);aubo_robots.(sprintf('robot%d', i)).base = transl(0, 0, 0);% 可选:显示D-H参数% aubo_robots.(sprintf('robot%d', i)).display();
end% 逆解组的八组关节角
joints = struct();
joints.type1 = [0.412302 -1.365035 -0.573020 2.362811 -1.570796 -2.729291];
joints.type2 = [0.412302 -0.824124 0.573020 2.967940 -1.570796 -2.729291];
joints.type3 = [0.412302 -1.581334 -1.239168 -1.228631 1.570796 0.412302];
joints.type4 = [0.412302 -0.419871 1.239168 0.088243 1.570796 0.412302];
joints.type5 = [-3.029190 0.419871 -1.239168 -0.088243 -1.570796 0.112402];
joints.type6 = [-3.029190 1.581334 1.239168 1.228631 -1.570796 0.112402];
joints.type7 = [-3.029190 0.824124 -0.573020 -2.967940 1.570796 -3.029190];
joints.type8 = [-3.029190 1.365035 0.573020 -2.362811 1.570796 -3.029190];% 分为二行四列的子图显示
for i = 1:aubo_robots_numrow = ceil(i / 4) - 1;col = mod(i - 1, 4) + 1;subplot(2, 4, row * 4 + col);aubo_robots.(sprintf('robot%d', i)).plot(joints.(sprintf('type%d', i)), 'view', [51, 38]);hold on;
end
hold off;
grid on;
2.2、运行效果
运行效果截图:
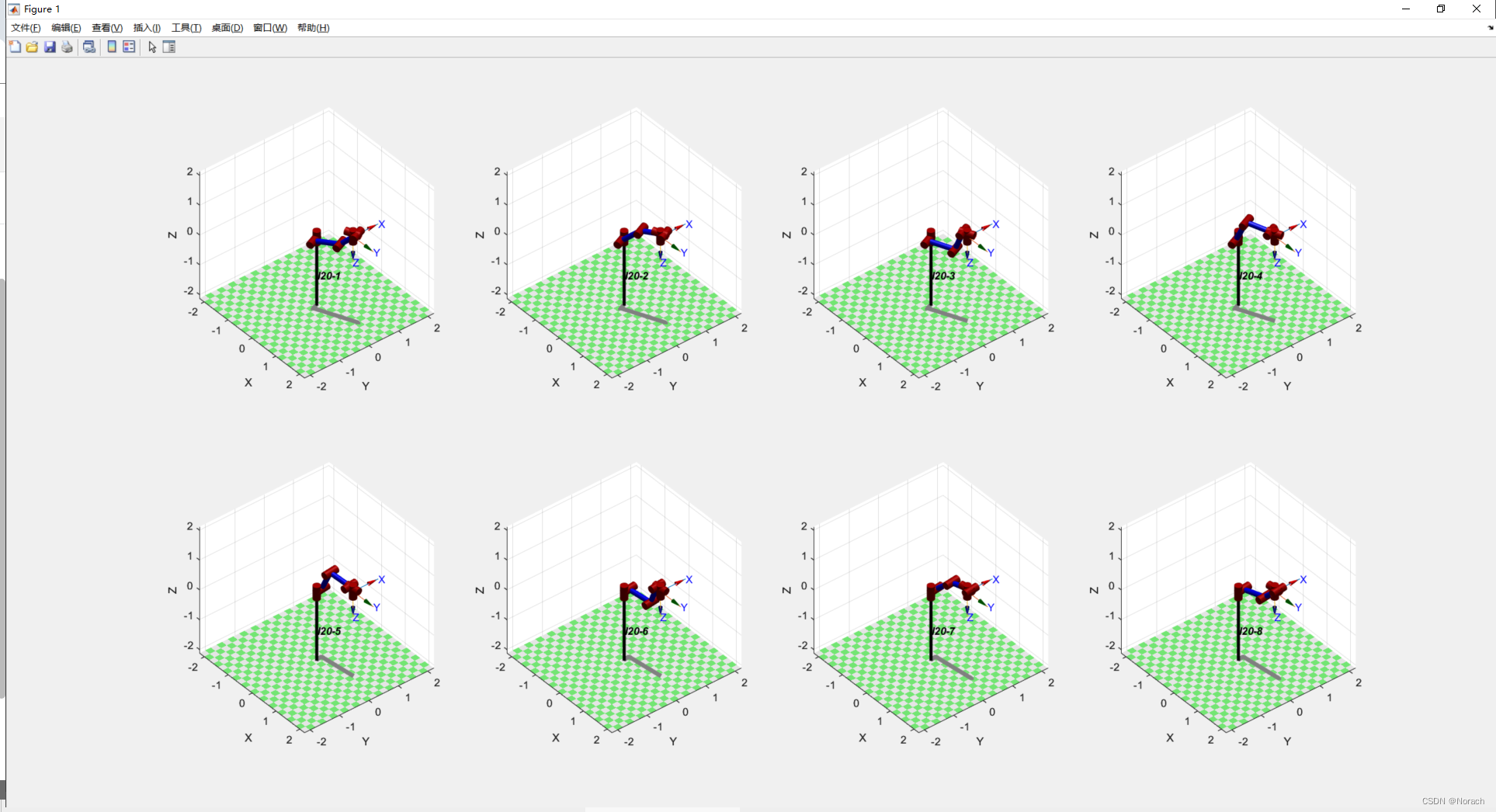
总结
八组解可视化,可以看出对应 左/右手位 * 肘关节高/低于髋关节 * 腕关节是否翻转。想起高中时数学老师常说的一个词 数形结合 ,可视化确实方便了不少对数据的分析。
相关文章:
遨博I20协作臂关节逆解组Matlab可视化
AUBO I20协作臂关节逆解组Matlab可视化 前言1、RTB使用注意点2、代码与效果2.1、完整代码2.2、运行效果 总结 前言 注意:请预先配置好Matlab和RTB机器人工具箱环境,本文使用matlab2022b和RTB10.04版本 工作需要,使用matlab实现对六轴机械臂…...
力扣题目训练(15)
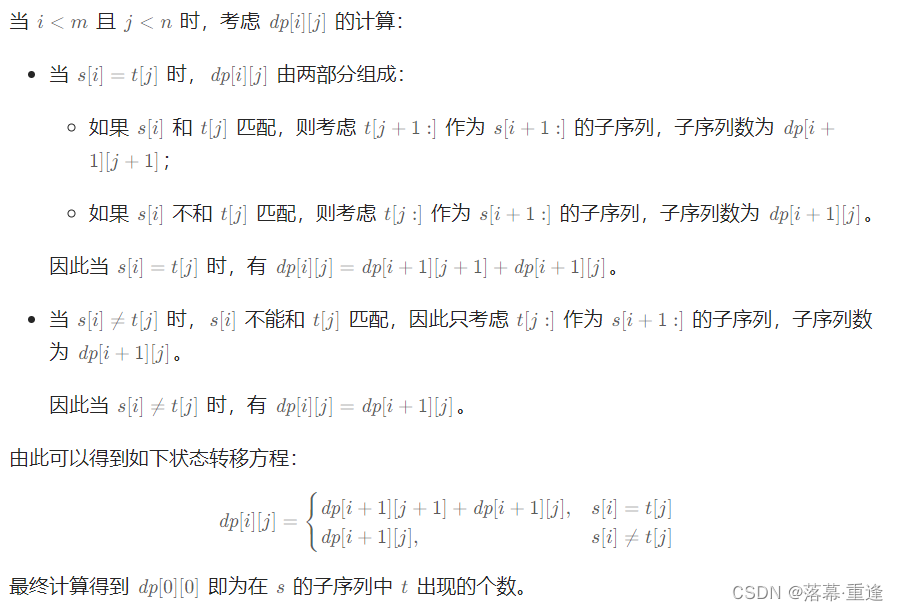
2024年2月8日力扣题目训练 2024年2月8日力扣题目训练507. 完美数520. 检测大写字母521. 最长特殊序列 Ⅰ221. 最大正方形237. 删除链表中的节点115. 不同的子序列 2024年2月8日力扣题目训练 2024年2月8日第十五天编程训练,今天主要是进行一些题训练,包括…...

PCB差模辐射是如何产生的
在电路应用中,高频时钟信号往往会采用差分线传输模式,其优点是在提高速率的同时减小功耗和提高抗扰度,因此,差模辐射就成为电路正常工作的结果,是电流流过导体形成的环路所产生,差模辐射模型可以被模拟为一个小环形天线,对于一个面积为A的小环路,载有电流Idm,在远场中…...
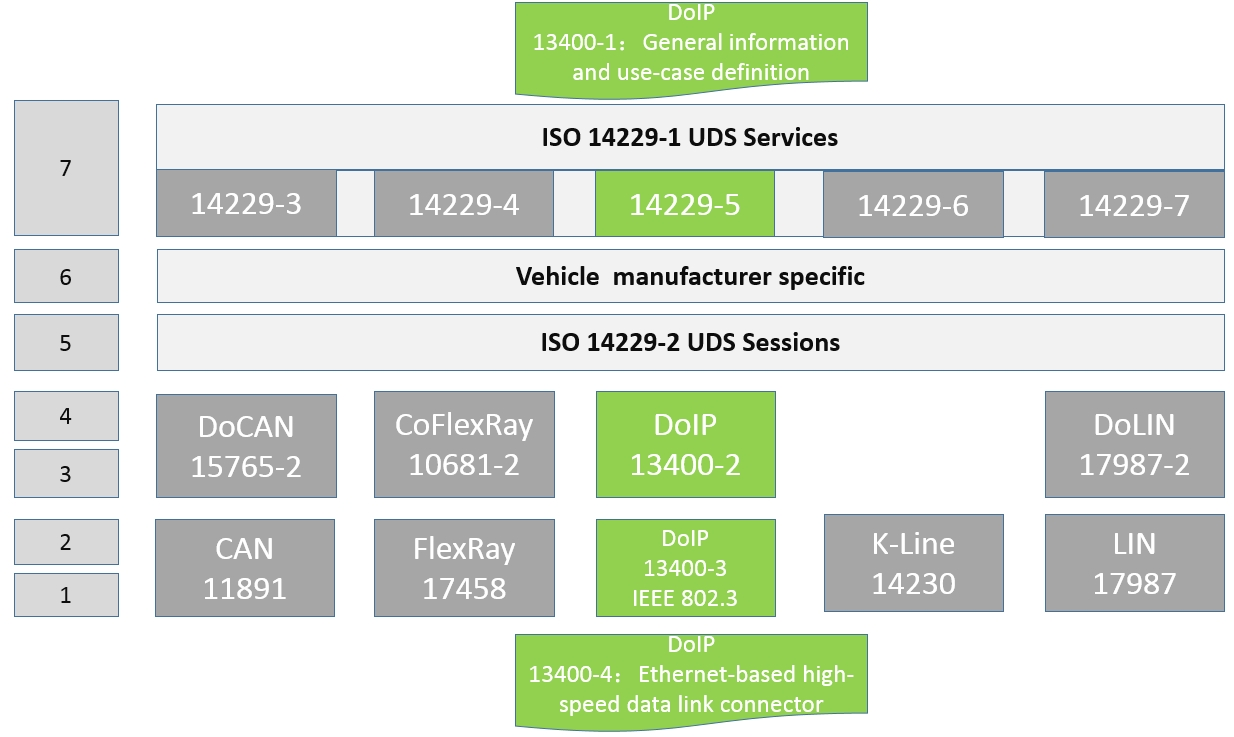
车载诊断协议DoIP系列 —— 协议中术语解释和定义
车载诊断协议DoIP系列 —— 协议中术语解释和定义 我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师(Wechat:gongkenan2013)。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 本就是小人物,输了就是输了,不要在意别人怎么看自己。江湖一碗茶,…...

【退役之重学前端】关于在控制台得到undefined的事
在浏览器控制台中,undefined 会时不时地,在我不想看到的地方出现。如果你遇到相同的问题,在这篇博客中你会得到答案。 先来看代码块 function test(){} test()//undefined再看下一个代码块 function test(){return 1; } test()//1再来看一个…...

指数和估计六大问题
1955年英国著名数学家R.A.Rankin在牛津大学出版的数学刊物Quart.J.Math.发表了论文(现 FRS D.R.Heath-Brown为主编),专门讲van der Corput方法产生的指数对理论(1933年E.Phillips提出的精彩理论,好友曲阜师范大学毕业中…...

【软件相关】基于Alist挂载云盘到本地文件资源管理器
文章目录 0 前言1 Alist挂载云盘2 RaiDrive配置3 rclone配置 0 前言 因为最近在研究各种云盘存储影视资源的方法,无意间看到一个教程是利用软件将云盘挂载到本地的资源管理器,这样就能实现类似本地文件操作的方式来操作云盘文件,还是有点意思…...

Java多线程系列——锁
0.引言 在并发编程中,锁是一种重要的同步机制,用于控制对共享资源的访问。Java 提供了多种锁的实现,每种锁都有不同的特性和适用场景。本文将深入介绍 Java 中常见的锁类型,包括内置锁、显式锁、读写锁等,并讨论它们的…...
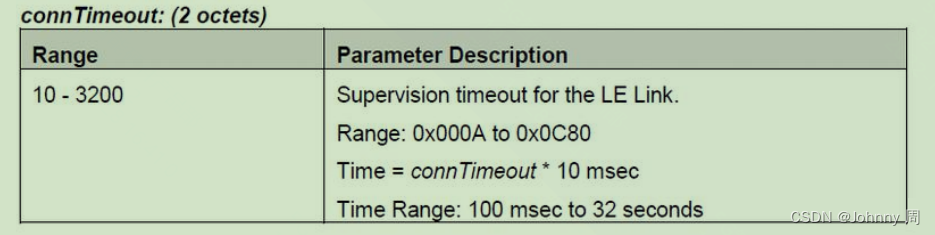
蓝牙BLE学习-GAP
1.概述 GAP层(Generic access profile-通用访问配置文件)。GAP是对LL层payload(有效数据包)如何进行解析的两种方式的一种,而且也是最简单的一种。GAP简单的对LL payload进行一些规范和定义,因此GAP能实现的…...
, 贪心算法2)
算法训练营day28(补), 贪心算法2
//122. 买卖股票的最佳时机 II func maxProfit(prices []int) int { result : 0 //利润总和 for i : 1; i < len(prices); i { if prices[i]-prices[i-1] > 0 { result result (prices[i] - prices[i-1]) } } return result } //55. 跳跃游戏 func canJump(nums []…...
Vue核心基础4:绑定样式、条件渲染、列表渲染
1 绑定样式 【代码】 <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>绑定样式</title><s…...

go-zero读取mysql部分字段
读取部分字段,使用函数 QueryRowPartialCtx 。 假设有如下一张表: CREATE TABLE test (id INT UNSIGNED NOT NULL AUTO_INCREMENT PRIMARY KEY, ctime DATETIME);要读取字段 ctime 值。 定义一结构体: type X struct {state int db:"…...
反转一个单链表
反转一个单链表 题意:反转一个单链表。 示例: 输入: 1->2->3->4->5->NULL 输出: 5->4->3->2->1->NULL 思路 需要虚拟节点么? 答:不需要,因为没有删除节点,只是改变了节点的指向。 遍…...
拿捏c语言指针(中)
前言 书接上回 拿捏c语言指针(上) 此篇主要讲解的是指针与数组之间的爱恨情仇,跟着我的脚步一起来看看吧~ 创造不易,可以帮忙点点赞吗 如有差错,欢迎指出 理解数组名 数组名是首元素地址 例外 1.sizeof࿰…...

鸿蒙语言ArkTS(更好的生产力与性能)
ArkTS是鸿蒙生态的应用开发语言 ArkTS提供了声明式UI范式、状态管理支持等相应的能力,让开发者可以以更简洁、更自然的方式开发应用。 同时,它在保持TypeScript(简称TS)基本语法风格的基础上,进一步通过规范强化静态检…...
VBA技术资料MF120:打印固定标题行列
我给VBA的定义:VBA是个人小型自动化处理的有效工具。利用好了,可以大大提高自己的工作效率,而且可以提高数据的准确度。“VBA语言専攻”提供的教程一共九套,分为初级、中级、高级三大部分,教程是对VBA的系统讲解&#…...

MongoDB聚合运算符:$add
$add运算符将将数字相加或将数字和日期相加。如果参数之一是日期,则 $add会将其他参数视为毫秒,并添加到日期中。 语法 { $add: [ <expression1>, <expression2>, ... ] }参数可以是任何有效的表达式,只要能否解析为数值或日期…...

《剑指Offer》笔记题解思路技巧优化 Java版本——新版leetcode_Part_4
《剑指Offer》笔记&题解&思路&技巧&优化_Part_4 😍😍😍 相知🙌🙌🙌 相识😢😢😢 开始刷题1. LCR 148. 验证图书取出顺序——栈的压入、弹出序列2. LCR 14…...
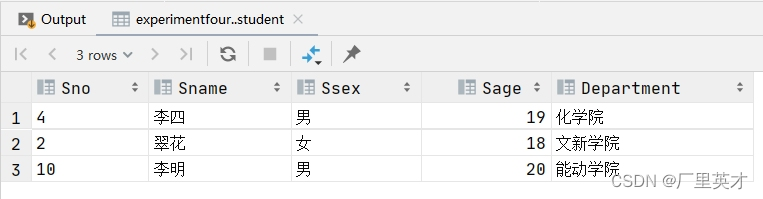
数据库第四次实验
目录 1.建立数据表并插入数据 2 视图的创建 2.1 行列子集视图的创建 2.2 多表视图 2.3视图上建立视图 2.4分组视图 2.5带表达式的视图 3 删除视图 4 查询视图 5 更新视图 5.1 修改某一个属性 5.2 删除一条数据 5.3 插入…...
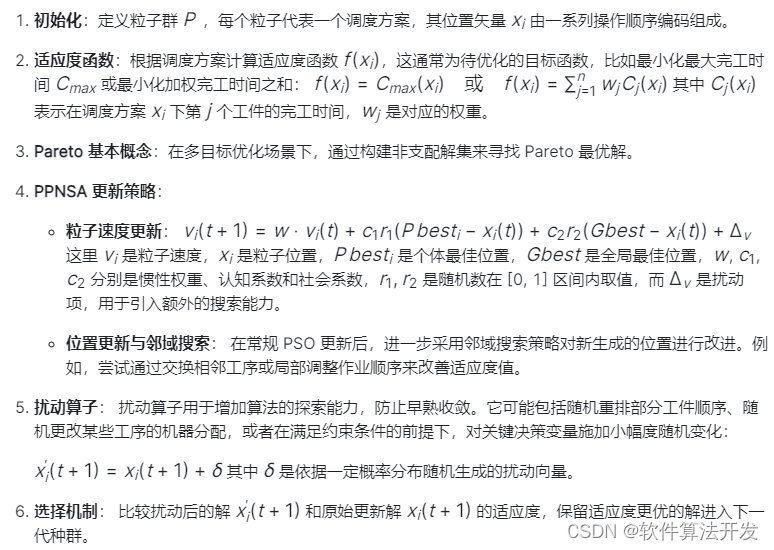
基于PPNSA+扰动算子的车间调度最优化matlab仿真,可以任意调整工件数和机器数,输出甘特图
目录 1.程序功能描述 2.测试软件版本以及运行结果展示 3.核心程序 4.本算法原理 5.完整程序 1.程序功能描述 基于PPNSA扰动算子的车间调度最优化matlab仿真,可以任意调整工件数和机器数,输出甘特图和优化收敛曲线。 2.测试软件版本以及运行结果展示 MATLAB2022a版本运行…...

多场景 OkHttpClient 管理器 - Android 网络通信解决方案
下面是一个完整的 Android 实现,展示如何创建和管理多个 OkHttpClient 实例,分别用于长连接、普通 HTTP 请求和文件下载场景。 <?xml version"1.0" encoding"utf-8"?> <LinearLayout xmlns:android"http://schemas…...

解锁数据库简洁之道:FastAPI与SQLModel实战指南
在构建现代Web应用程序时,与数据库的交互无疑是核心环节。虽然传统的数据库操作方式(如直接编写SQL语句与psycopg2交互)赋予了我们精细的控制权,但在面对日益复杂的业务逻辑和快速迭代的需求时,这种方式的开发效率和可…...
微服务商城-商品微服务
数据表 CREATE TABLE product (id bigint(20) UNSIGNED NOT NULL AUTO_INCREMENT COMMENT 商品id,cateid smallint(6) UNSIGNED NOT NULL DEFAULT 0 COMMENT 类别Id,name varchar(100) NOT NULL DEFAULT COMMENT 商品名称,subtitle varchar(200) NOT NULL DEFAULT COMMENT 商…...

大学生职业发展与就业创业指导教学评价
这里是引用 作为软工2203/2204班的学生,我们非常感谢您在《大学生职业发展与就业创业指导》课程中的悉心教导。这门课程对我们即将面临实习和就业的工科学生来说至关重要,而您认真负责的教学态度,让课程的每一部分都充满了实用价值。 尤其让我…...
Maven 概述、安装、配置、仓库、私服详解
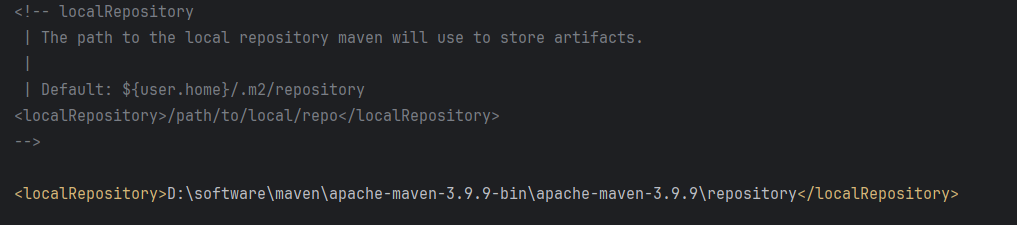
目录 1、Maven 概述 1.1 Maven 的定义 1.2 Maven 解决的问题 1.3 Maven 的核心特性与优势 2、Maven 安装 2.1 下载 Maven 2.2 安装配置 Maven 2.3 测试安装 2.4 修改 Maven 本地仓库的默认路径 3、Maven 配置 3.1 配置本地仓库 3.2 配置 JDK 3.3 IDEA 配置本地 Ma…...

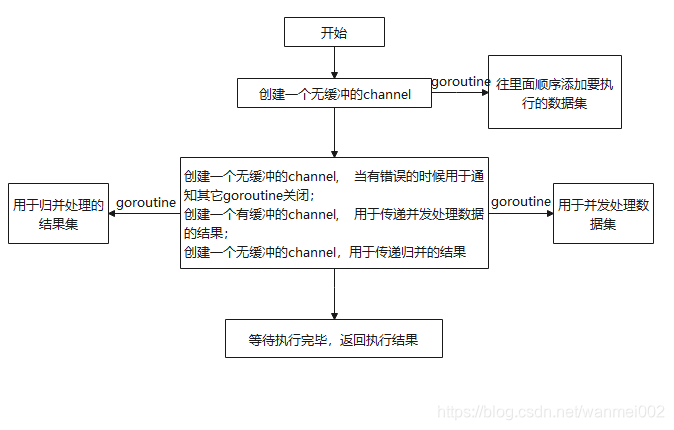
Python+ZeroMQ实战:智能车辆状态监控与模拟模式自动切换
目录 关键点 技术实现1 技术实现2 摘要: 本文将介绍如何利用Python和ZeroMQ消息队列构建一个智能车辆状态监控系统。系统能够根据时间策略自动切换驾驶模式(自动驾驶、人工驾驶、远程驾驶、主动安全),并通过实时消息推送更新车…...

根目录0xa0属性对应的Ntfs!_SCB中的FileObject是什么时候被建立的----NTFS源代码分析--重要
根目录0xa0属性对应的Ntfs!_SCB中的FileObject是什么时候被建立的 第一部分: 0: kd> g Breakpoint 9 hit Ntfs!ReadIndexBuffer: f7173886 55 push ebp 0: kd> kc # 00 Ntfs!ReadIndexBuffer 01 Ntfs!FindFirstIndexEntry 02 Ntfs!NtfsUpda…...

WebRTC调研
WebRTC是什么,为什么,如何使用 WebRTC有什么优势 WebRTC Architecture Amazon KVS WebRTC 其它厂商WebRTC 海康门禁WebRTC 海康门禁其他界面整理 威视通WebRTC 局域网 Google浏览器 Microsoft Edge 公网 RTSP RTMP NVR ONVIF SIP SRT WebRTC协…...

[特殊字符] 手撸 Redis 互斥锁那些坑
📖 手撸 Redis 互斥锁那些坑 最近搞业务遇到高并发下同一个 key 的互斥操作,想实现分布式环境下的互斥锁。于是私下顺手手撸了个基于 Redis 的简单互斥锁,也顺便跟 Redisson 的 RLock 机制对比了下,记录一波,别踩我踩过…...
:LSM Tree 概述)
从零手写Java版本的LSM Tree (一):LSM Tree 概述
🔥 推荐一个高质量的Java LSM Tree开源项目! https://github.com/brianxiadong/java-lsm-tree java-lsm-tree 是一个从零实现的Log-Structured Merge Tree,专为高并发写入场景设计。 核心亮点: ⚡ 极致性能:写入速度超…...